图1
UAV-MEC网络的NFV和SDN架构
Fig.1
NFV and SDN architecture for UAV-MEC networks
图2
UAV-MEC网络典型场景图
Fig.2
Typical scenarios of UAV-MEC network
图3
UAV-MEC网络可能的应用场景
Fig.3
Potential application scenarios of UAV-MEC network
图4
UAV-MEC网络中全向天线与波束成形SDMA接入方案的示意图
Fig.4
Schematic diagram of omnidirectional antenna and SDMA scheme in UAV-MEC network
图5
TDMA、FDMA、OFDMA和CDMA中多用户资源分配示意图
Fig.5
Diagram of multi-user resource allocation in TDMA, FDMA, OFDMA and CDMA
图6
UAV-MEC网络中PD-NOMA与SCMA接入方案的示意图
Fig.6
Schematic diagram of PD-NOMA and SCMA access scheme in UAV-MEC network
文献[47 ]采用部分卸载的方式, 计算任务分为两部分, 一部分由UAV完成, 其他部分由本地计算; 通过共同优化UAV轨迹、部分卸载任务的比率和用户调度变量, 最小化用户设备任务的最大时延之和; 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法; 仿真分析表明, 该算法的复杂度较低, 且降低了设备任务的时延。文献[48 ]探讨基于毫米波回程的低延迟UAV-MEC网络, 采用联合交替方向乘子法(alternating direction method of multipliers, ADMM)、Dinkelbach算法和SCA算法求解最小化任务时延的问题, 得到最优的卸载策略; 所提算法能够较好地完成设备的时间敏感型任务。文献[49 ]研究UAV辅助的超高可靠低延迟计算卸载的问题, 利用SCA算法解决UAV优化布局的规划问题以及在UAV能量受限的情况下进行资源分配和计算卸载决策的问题。文献[50 ]考虑UAV-MEC网络中多UAV协同提供计算服务, 以最小化所有设备之间的最大任务完成延迟为目标, 提出一种基于BCD和SCA技术的迭代算法来获得近似最优解。文献[51 ]研究多UAV边缘云协同卸载的延迟最小化问题, 采用凸近似方法使原始问题易于处理, 利用李雅普诺夫优化方法进行在线任务卸载决策。为了实现UAV之间的合作, 文献[52 ]提出一种稳定匹配算法, 将计算任务卸载问题转化为双边匹配问题, 利用迭代算法, 使每架UAV与最适合卸载的设备相匹配, 有效降低了平均时延。文献[53 ]提出一种基于Stackelberg博弈方法求解多层UAV-MEC网络中计算卸载决策问题, 配备MEC服务器的UAV通过考虑其他UAV的行为来优化其定价, 以最大化收入; 每个用户设备选择最佳的计算任务卸载策略, 最大限度地减少延迟; 仿真结果表明, 该方案能有效地降低UAV的卸载时延。文献[54 ]在UAV-MEC系统中, 将复杂的计算任务分解为具有相互依赖性的典型任务流; 通过考虑UAV任务、动态网络状态和能量约束的相互依赖性, 建立平均任务响应时间最小化问题, 并将其建模为马尔可夫决策过程; 每次任务到达或任务执行完成时, 方案应该决定下一个任务执行的无人机MEC服务器, 实现协同任务卸载, 提出了多智能体强化学习(multi-agent reinforcement learning, MARL)算法的计算卸载策略; 基于MARL的计算卸载策略具有较好的收敛性, 能够显著降低平均任务响应时间并能适应动态环境。
文献[62 ]研究UAV-MEC具体场景, 其中每个终端可以使用3种计算策略, 即本地计算、卸载部分任务到UAV进行计算、通过UAV中继将任务卸载到基站, 文中通过优化计算卸载比特分配、时隙调度、和功率分配以及UAV轨迹权衡时延和能耗加权和, 并利用拉格朗日对偶法和SCA算法获得近似最优解。文献[63 ]研究计算卸载和资源分配的联合设计, 通过交替优化算法求解了权衡UAV能量和任务完成时间的帕累托最优解, 仿真结果证实所提解决方案能够达到UAV在MEC系统中完成时间和能量消耗之间的权衡。文献[29 ]研究UAV-MEC系统中最小化时间延迟和能量消耗的加权和的问题; 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性; 仿真结果表明, 该博弈论方案能够达到接近最优的性能。文献[64 ]考虑UAV作为用户设备的场景, 机载资源有限的处理能力和能量存储, 使复杂信号的实时分析受到限制; 此时, UAV可以对接边缘计算资源, 卸载计算任务, 降低对传感器输入的响应时间, 降低能耗; 而动态的信道条件和边缘服务器拥塞情况可能会影响任务卸载的性能; 提出一个基于网络、计算负荷参数和当前状态的最优卸载决策框架, 将时延和能耗的优化问题表述为半马尔可夫过程的最优停止时间问题, 并使用动态规划和DRL方法求解该问题。文献[65 ]提出一种基于深度Q网络(deep Q network, DQN)调整计算卸载比例的策略, 降低UAV-MEC网络中任务延迟和能量消耗的线性加权和。文献[66 ]考虑一个配备MEC服务器的多UAV集群网络, 每个UAV集群簇头作为一个智能体, 以分布式方法分配计算资源给终端设备; 提出一种基于无模型DRL的协同计算卸载与资源分配方案, 其中每个智能体基于深度确定性策略梯度(deep deterministic policy gradient, DDPG)网络训练并学习高效的计算卸载策略, 通过公平性指数检查各UAV的状态, 文中目标是通过自适应学习, 最大限度地减少任务的执行延迟和能量消耗, 并获得有效的计算卸载策略。文献[67 ]研究多UAV的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略使任务执行延迟和能量消耗之和最小化。文献[68 ]提出一种多智能体DDPG(multi-agent DDPG, MADDPG)框架, 共同优化多UAV的飞行路线和物联网设备的协同卸载决策, 降低任务处理延迟和设备能量消耗。表 2 总结对比了上述文献中不同计算卸载策略的求解方法。
[1]
LI A , DAI L B , YU L S . Resource allocation for multi-UAV-assisted mobile edge computing to minimize weighted energy consumption
[J]. IET Communications , 2022 , 16 (17 ): 2070 - 2081 .
DOI:10.1049/cmu2.12460
[本文引用: 1]
[2]
MAO Y Y , YOU C S , ZHANG J , et al . A survey on mobile edge computing: the communication perspective
[J]. IEEE Communications Surveys and Tutorials , 2017 , 19 (4 ): 2322 - 2358 .
DOI:10.1109/COMST.2017.2745201
[本文引用: 1]
[3]
李安 , 戴龙斌 , 余礼苏 , 等 . 加权能耗最小化的无人机辅助移动边缘计算资源分配策略
[J]. 电子与信息学报 , 2022 , 44 (11 ): 3858 - 3865 .
DOI:10.11999/JEIT210832
[本文引用: 1]
LI A , DAI L B , YU L S , et al . Resource allocation for unmanned aerial vehicle-assisted mobile edge computing to minimize weighted energy consumption
[J]. Journal of Electronics & Information Technology , 2022 , 44 (11 ): 3858 - 3865 .
DOI:10.11999/JEIT210832
[本文引用: 1]
[4]
卞颖颖 . 5G通信技术促进军用无人机发展
[J]. 军事文摘 , 2019 , (7 ): 20 - 23 .
URL
[本文引用: 1]
BIAN Y Y . 5G communication technology boosts the development of military drones
[J]. Military Digest , 2019 , (7 ): 20 - 23 .
URL
[本文引用: 1]
[5]
余雪勇 , 朱烨 , 邱礼翔 , 等 . 基于无人机辅助边缘计算系统的节能卸载策略
[J]. 系统工程与电子技术 , 2022 , 44 (3 ): 1022 - 1029 .
URL
[本文引用: 1]
YU X Y , ZHU Y , QIU L X , et al . Energy efficient offloading strategy for UAV aided edgecomputing systems
[J]. Systems Engineering and Electronics , 2022 , 44 (3 ): 1022 - 1029 .
URL
[本文引用: 1]
[6]
JAAFAR W , NASER S , MUHAIDAT S , et al . Multiple access in aerial networks: from orthogonal and non-orthogonal to rate-splitting
[J]. IEEE Open Journal of Vehicular Technology , 2020 , 1 , 372 - 392 .
DOI:10.1109/OJVT.2020.3032844
[本文引用: 2]
[7]
NEW W K , LEOW C Y , NAVAIE K , et al . Application of NOMA for cellular-connected UAVs: opportunities and challenges
[J]. SCIENCE CHINA Information Sciences , 2021 , 64 (4 ): 22 - 35 .
[本文引用: 1]
[8]
李子姝 , 谢人超 , 孙礼 , 等 . 移动边缘计算综述
[J]. 电信科学 , 2018 , 34 (1 ): 87 - 101 .
URL
[本文引用: 1]
LI Z S , XIE R C , SUN L , et al . A survey of mobile edge computing
[J]. Telecommunication Science , 2018 , 34 (1 ): 87 - 101 .
URL
[本文引用: 1]
[9]
张依琳 , 梁玉珠 , 尹沐君 , 等 . 移动边缘计算中计算卸载方案研究综述
[J]. 计算机学报 , 2021 , 44 (12 ): 2406 - 2430 .
DOI:10.11897/SP.J.1016.2021.02406
[本文引用: 1]
ZHANG Y L , LIANG Y Z , YIN M J , et al . Survey on the methods of computation offloading in mobile edge computing
[J]. Chinese Journal of Computers , 2021 , 44 (12 ): 2406 - 2430 .
DOI:10.11897/SP.J.1016.2021.02406
[本文引用: 1]
[10]
ABRAR M , AJMAL U , ALMOHAIMEED Z M , et al . Energy efficient UAV-enabled mobile edge computing for IoT devices: a review
[J]. IEEE Access , 2021 , 9 , 127779 - 127798 .
DOI:10.1109/ACCESS.2021.3112104
[本文引用: 1]
[12]
邱铭 . 基于无人机移动边缘计算的软件定义网络架构分析
[J]. 电子世界 , 2020 , (5 ): 62 - 63 .
[本文引用: 3]
QIU M . Architecture analysis of software-defined network for UAV-based mobile edge computing
[J]. Journal of Electronic World , 2020 , (5 ): 62 - 63 .
[本文引用: 3]
[13]
LIN C , HAN G , SHAH S B H , et al . Integrating mobile edge computing into unmanned aerial vehicle networks: an SDN-enabled architecture
[J]. IEEE Internet of Things Magazine , 2021 , 4 (4 ): 18 - 23 .
DOI:10.1109/IOTM.001.2100070
[本文引用: 1]
[14]
HUDA S M A , MOH S . Survey on computation offloading in UAV-enabled mobile edge computing
[J]. Journal of Network and Computer Applications , 2022 , 201 , 103341 .
DOI:10.1016/j.jnca.2022.103341
[本文引用: 1]
[15]
LIU Z W , CAO Y , GAO P , et al . Multi-UAV network assisted intelligent edge computing: challenges and opportunities
[J]. China Communications , 2022 , 19 (3 ): 258 - 278 .
DOI:10.23919/JCC.2022.03.019
[本文引用: 1]
[16]
董超 , 沈赟 , 屈毓锛 . 基于无人机的边缘智能计算研究综述
[J]. 智能科学与技术学报 , 2020 , 2 (3 ): 227 - 239 .
[本文引用: 1]
DONG C , SHEN Y , QU Y Z . A survey of edge intelligent computing based on UAV
[J]. Journal of Intelligent Science and Technology , 2020 , 2 (3 ): 227 - 239 .
[本文引用: 1]
[17]
BEKKOUCHE O, BAGAA M, TALEB T. Toward a UTM-based service orchestration for UAVs in MEC-NFV environment[C]//Proc. of the IEEE Global Communications Confe-rence, 2019.
[本文引用: 1]
[18]
MOTLAGH N H , BAGAA M , TALEB T . UAV-based IoT platform: a crowd surveillance use case
[J]. IEEE Communications Magazine , 2017 , 55 (2 ): 128 - 134 .
DOI:10.1109/MCOM.2017.1600587CM
[本文引用: 1]
[19]
XU Y J , YANG M , YANG Y , et al . Max-min energy-efficient optimization for cognitive heterogeneous networks with spectrum sensing errors and channel uncertainties
[J]. IEEE Wireless Communications Letters , 2021 , 11 (6 ): 1113 - 1117 .
[本文引用: 1]
[20]
DU Y , YANG K , WANG K Z , et al . Joint resources and workflow scheduling in UAV-enabled wirelessly-powered MEC for IoT systems
[J]. IEEE Trans.on Vehicular Technology , 2019 , 68 (10 ): 10187 - 10200 .
DOI:10.1109/TVT.2019.2935877
[本文引用: 2]
[21]
XU Y , ZHANG T K , YANG D C , et al . Joint resource and trajectory optimization for security in uav-assisted MEC systems
[J]. IEEE Trans.on Communications , 2021 , 69 (1 ): 573 - 588 .
DOI:10.1109/TCOMM.2020.3025910
[本文引用: 2]
[22]
SUN C , NI W , WANG X . Joint computation offloading and trajectory planning for UAV-assisted edge computing
[J]. IEEE Trans.on Wireless Communications , 2021 , 20 (8 ): 5343 - 5358 .
DOI:10.1109/TWC.2021.3067163
[本文引用: 2]
[23]
YU Z , GONG Y M , GONG S M , et al . Joint task offloading and resource allocation in UAV-enabled mobile edge computing
[J]. IEEE Internet of Things Journal , 2020 , 7 (4 ): 3147 - 3159 .
DOI:10.1109/JIOT.2020.2965898
[本文引用: 2]
[24]
LI W T , ZHAO M X , WU Y H , et al . Collaborative offloading for UAV-enabled time-sensitive MEC networks
[J]. EURASIP Journal on Wireless Communications and Networking , 2021 , 2021 , 1 .
DOI:10.1186/s13638-020-01861-8
[本文引用: 2]
[25]
LIU S Y , YANG T T . Delay aware scheduling in UAV-enabled OFDMA mobile edge computing system
[J]. IET Communications , 2020 , 14 (18 ): 3203 - 3211 .
DOI:10.1049/iet-com.2020.0274
[本文引用: 2]
[26]
WU Y H , WANG Y H , ZHOU F H , et al . Computation efficiency maximization in OFDMA-based mobile edge computing networks
[J]. IEEE Communications Letters , 2020 , 24 (1 ): 159 - 163 .
DOI:10.1109/LCOMM.2019.2950013
[本文引用: 2]
[27]
XU Y , ZHANG T K , LIU Y W , et al . UAV-assisted MEC networks with aerial and ground cooperation
[J]. IEEE Trans.on Wireless Communications , 2021 , 20 (12 ): 7712 - 7727 .
DOI:10.1109/TWC.2021.3086521
[本文引用: 2]
[28]
KHAN S , SAAD W , ZEESHAN M , et al . Implementation and analysis of multicode multicarrier code division multiple access (MC-MC CDMA) in IEEE 802. 11ah for UAV swarm communication
[J]. Physical Communication , 2020 , 42 , 101159 .
DOI:10.1016/j.phycom.2020.101159
[本文引用: 2]
[29]
ZHANG K Y , GUI X L , REN D W , et al . Energy-latency tradeoff for computation offloading in UAV-assisted multiaccess edge computing system
[J]. IEEE Internet of Things Journal , 2021 , 8 (8 ): 6709 - 6719 .
DOI:10.1109/JIOT.2020.2999063
[本文引用: 4]
[30]
ZHANG Q X , CHEN J R , JI L , et al . Response delay optimization in mobile edge computing enabled UAV swarm
[J]. IEEE Trans.on Vehicular Technology , 2020 , 69 (3 ): 3280 - 3295 .
DOI:10.1109/TVT.2020.2964821
[本文引用: 2]
[31]
XU Y J , HU R Q , LI G Q . Robust energy-efficient maximization for cognitive NOMA networks under channel uncertainties
[J]. IEEE Internet of Things Journal , 2020 , 7 (9 ): 8318 - 8330 .
DOI:10.1109/JIOT.2020.2989464
[本文引用: 1]
[32]
XU Y J , QIN Z J , GUI G , et al . Energy efficiency maximization in NOMA enabled backscatter communications with QoS guarantee
[J]. IEEE Wireless Communications Letters , 2020 , 10 (2 ): 353 - 357 .
[本文引用: 1]
[33]
DIAO X B , ZHENG J C , WU Y , et al . Joint trajectory design, task data, and computing resource allocations for NOMA-based and UAV-assisted mobile edge computing
[J]. IEEE Access , 2019 , 7 , 117448 - 117459 .
DOI:10.1109/ACCESS.2019.2936437
[本文引用: 1]
[34]
HUA M , HUANG Y M , WANG Y , et al . Energy optimization for cellular-connected multi-UAV mobile edge computing systems with multi-access schemes
[J]. Journal of Communications and Information Networks , 2018 , 3 (4 ): 33 - 44 .
DOI:10.1007/s41650-018-0035-0
[本文引用: 2]
[35]
JEONG S , SIMEONE O , KANG J . Mobile edge computing via a UAV-mounted cloudlet: optimization of bit allocation and path planning
[J]. IEEE Trans.on Vehicular Technology , 2018 , 67 (3 ): 2049 - 2063 .
DOI:10.1109/TVT.2017.2706308
[本文引用: 2]
[36]
BUDHIRAJA I , KUMAR N , TYAGI S , et al . Energy consumption minimization scheme for NOMA-based mobile edge computation networks underlaying UAV
[J]. IEEE Systems Journal , 2021 , 15 (4 ): 5724 - 5733 .
DOI:10.1109/JSYST.2021.3076782
[本文引用: 2]
[37]
ZHANG X C , ZHANG J , XIONG J , et al . Energy-efficient multi-UAV-enabled multiaccess edge computing incorporating NOMA
[J]. IEEE Internet of Things Journal , 2020 , 7 (6 ): 5613 - 5627 .
DOI:10.1109/JIOT.2020.2980035
[本文引用: 2]
[38]
TRUONG T P , DAO N N , CHO S . HAMEC-RSMA: enhanced aerial computing systems with rate splitting multiple access
[J]. IEEE Access , 2022 , 10 , 52398 - 52409 .
DOI:10.1109/ACCESS.2022.3173125
[本文引用: 2]
[39]
GUO F X, ZHANG H L, JI H, et al. Joint trajectory and computation offloading optimization for UAV-assisted MEC with NOMA[C]//Proc. of the IEEE Conference on Computer Communications Workshops, 2019.
[本文引用: 2]
[40]
SHENG M , DAI Y P , LIU J Y , et al . Delay-aware computation offloading in NOMA MEC under differentiated uploading delay
[J]. IEEE Trans.on Wireless Communications , 2020 , 19 (4 ): 2813 - 2826 .
DOI:10.1109/TWC.2020.2968426
[本文引用: 2]
[41]
LIU P T , AN K , LEI J , et al . SCMA-based multiaccess edge computing in IoT systems: an energy-efficiency and latency tradeoff
[J]. IEEE Internet of Things Journal , 2022 , 9 (7 ): 4849 - 4862 .
DOI:10.1109/JIOT.2021.3105658
[本文引用: 2]
[42]
LIU P T, LEI J, LIU W. An optimization scheme for SCMA-based multi-access edge computing[C]//Proc. of the IEEE 93rd Vehicular Technology Conference, 2021.
[本文引用: 1]
[43]
FENG W M , TANG J , ZHAO N , et al . Hybrid beamforming design and resource allocation for UAV-aided wireless-powered mobile edge computing networks with NOMA
[J]. IEEE Journal on Selected Areas in Communications , 2021 , 39 (11 ): 3271 - 3286 .
DOI:10.1109/JSAC.2021.3091158
[本文引用: 2]
[44]
JAAFAR W , NASER S , MUHAIDAT S , et al . On the downlink performance of RSMA-based UAV communications
[J]. IEEE Trans.on Vehicular Technology , 2020 , 69 (12 ): 16258 - 16263 .
DOI:10.1109/TVT.2020.3037657
[本文引用: 2]
[45]
CHEN P X , LIU H W , YE Y H , et al . Rate-splitting multiple access aided mobile edge computing with randomly deployed users
[J]. IEEE Journal on Selected Areas in Communications , 2023 , 41 (5 ): 1549 - 1564 .
DOI:10.1109/JSAC.2023.3240786
[本文引用: 2]
[46]
XU Y , GU B , HU R Q , et al . Joint computation offloading and radio resource allocation in MEC-based wireless-powered backscatter communication networks
[J]. IEEE Trans.on Vehicular Technology , 2021 , 70 (6 ): 6200 - 6205 .
DOI:10.1109/TVT.2021.3077094
[本文引用: 1]
[47]
HU Q Y , CAI Y L , YU G D , et al . Joint offloading and trajectory design for UAV-enabled mobile edge computing systems
[J]. IEEE Internet of Things Journal , 2019 , 6 (2 ): 1879 - 1892 .
DOI:10.1109/JIOT.2018.2878876
[本文引用: 2]
[48]
YU Y, BU X Y, YANG K, et al. UAV-aided low latency mobile edge computing with mmWave backhaul[C]//Proc. of the IEEE International Conference on Communications, 2019.
[本文引用: 2]
[49]
HABER E E , ALAMEDDINE H A , ASSI C , et al . UAV-aided ultra-reliable low-latency computation offloading in future IoT networks
[J]. IEEE Trans.on Communications , 2021 , 69 (10 ): 6838 - 6851 .
DOI:10.1109/TCOMM.2021.3096559
[本文引用: 2]
[50]
ZHENG G Y , XU C , WEN M W , et al . Service caching based aerial cooperative computing and resource allocation in multi-UAV enabled mec systems
[J]. IEEE Trans.on Vehicular Technology , 2022 , 71 (10 ): 10934 - 10947 .
DOI:10.1109/TVT.2022.3183577
[本文引用: 2]
[51]
BAI Z Y , LIN Y F , CAO Y , et al . Delay-aware cooperative task offloading for multi-UAV enabled edge-cloud computing
[J]. IEEE Trans.on Mobile Computing , 2024 , 23 (2 ): 1034 - 1049 .
[本文引用: 2]
[52]
CHEN W W, SU Z, XU Q L, et al. VFC-based cooperative UAV computation task offloading for post-disaster rescue[C]//Proc. of the IEEE Conference on Computer Communications, 2020: 228-236.
[本文引用: 2]
[53]
LIU J F, LI L X, YANG F C, et al. Minimization of offloading delay for two-tier UAV with mobile edge computing[C]//Proc. of the 15th International Wireless Communications & Mobile Computing Conference, 2019: 1534-1538.
[本文引用: 2]
[54]
ZHU S C , GUI L , ZHAO D M , et al . Learning-based computation offloading approaches in UAVs-assisted edge computing
[J]. IEEE Trans.on Vehicular Technology , 2021 , 70 (1 ): 928 - 944 .
DOI:10.1109/TVT.2020.3048938
[本文引用: 2]
[55]
ALSENWI M, TUN Y K, RAJ-PANDEY S, et al. UAV-assisted multi-access edge computing system: an energy-efficient resource management framework[C]//Proc. of the International Conference on Information Networking, 2020: 214-219.
[本文引用: 2]
[56]
GUO H Z , LIU J J . UAV-enhanced intelligent offloading for internet of things at the edge
[J]. IEEE Trans.on Industrial Informatics , 2020 , 16 (4 ): 2737 - 2746 .
DOI:10.1109/TII.2019.2954944
[本文引用: 2]
[57]
ZHANG J , ZHOU L , TANG Q , et al . Stochastic computation offloading and trajectory scheduling for UAV-assisted mobile edge computing
[J]. IEEE Internet of Things Journal , 2019 , 6 (2 ): 3688 - 3699 .
DOI:10.1109/JIOT.2018.2890133
[本文引用: 2]
[58]
CHEN J X , WU Q H , XU Y H , et al . A multi-leader multi-follower Stackelberg game for coalition-based UAV MEC networks
[J]. IEEE Wireless Communications Letters , 2021 , 10 (11 ): 2350 - 2354 .
DOI:10.1109/LWC.2021.3100113
[本文引用: 2]
[59]
YANG Z , CHEN M Z , LIU X , et al . AI-driven UAV-NOMA-MEC in next generation wireless networks
[J]. IEEE Wireless Communications , 2021 , 28 (5 ): 66 - 73 .
DOI:10.1109/MWC.121.2100058
[本文引用: 2]
[60]
WU G X , MIAO Y M , ZHANG Y , et al . Energy efficient for UAV-enabled mobile edge computing networks: intelligent task prediction and offloading
[J]. Computer Communications , 2020 , 150 , 556 - 562 .
DOI:10.1016/j.comcom.2019.11.037
[本文引用: 2]
[61]
ASHERALIEVA A , NIYATO D . Hierarchical game-theoretic and reinforcement learning framework for computational offloading in UAV-enabled mobile edge computing networks with multiple service providers
[J]. IEEE Internet of Things Journal , 2019 , 6 (5 ): 8753 - 8769 .
DOI:10.1109/JIOT.2019.2923702
[本文引用: 2]
[62]
ZHANG T K , XU Y , LOO J , et al . Joint computation and communication design for UAV-assisted mobile edge computing in IoT
[J]. IEEE Trans.on Industrial Informatics , 2020 , 16 (8 ): 5505 - 5516 .
DOI:10.1109/TII.2019.2948406
[本文引用: 2]
[63]
ZHAN C , HU H , SUI X F , et al . Completion time and energy optimization in the UAV-enabled mobile-edge computing system
[J]. IEEE Internet of Things Journal , 2020 , 7 (8 ): 7808 - 7822 .
DOI:10.1109/JIOT.2020.2993260
[本文引用: 2]
[64]
CALLEGARO D , LEVORATO M . Optimal edge computing for infrastructure-assisted UAV systems
[J]. IEEE Trans.on Vehicular Technology , 2021 , 70 (2 ): 1782 - 1792 .
DOI:10.1109/TVT.2021.3051378
[本文引用: 2]
[65]
CHEN L M , KUANG X Y , ZHU F S , et al . Intelligent mobile edge computing networks for Internet of Things
[J]. IEEE Access , 2021 , 9 , 95665 - 95674 .
DOI:10.1109/ACCESS.2021.3093886
[本文引用: 2]
[66]
SEID A M , BOATENG G O , ANOKYE S , et al . Collaborative computation offloading and resource allocation in multi-UAV-assisted IoT networks: a deep reinforcement learning approach
[J]. IEEE Internet of Things Journal , 2021 , 8 (15 ): 12203 - 12218 .
DOI:10.1109/JIOT.2021.3063188
[本文引用: 2]
[67]
ZHAO N , YE Z Y , PEI Y Y , et al . Multi-agent deep reinforcement learning for task offloading in UAV-assisted mobile edge computing
[J]. IEEE Trans.on Wireless Communications , 2022 , 21 (9 ): 6949 - 6960 .
DOI:10.1109/TWC.2022.3153316
[本文引用: 2]
[68]
YU K J, CUI Q M, ZHANG Z Y, et al. Efficient UAV/satellite-assisted IoT task offloading: a multi-agent reinforcement learning solution[C]//Proc. of the 27th Asia Pacific Conference on Communications, 2022: 83-88.
[本文引用: 2]
Resource allocation for multi-UAV-assisted mobile edge computing to minimize weighted energy consumption
1
2022
... 近年来, 无人机(unmanned aerial vehicle, UAV)通信系统的发展呈现出迅猛的势头.这一技术领域的突飞猛进不仅推动了UAV行业的快速发展, 也为各个领域带来了新的可能性和前景.首先, UAV通信系统在军事领域发挥着越来越重要的作用.军事部队利用UAV进行侦察、监视、目标定位等任务, 而这些任务的成功执行离不开高效可靠的通信系统.其次, 在商业领域, UAV通信系统的迅速发展也催生了诸多应用.从快递配送到农业植保, UAV在商业运营中的应用场景日益丰富.随着消费级UAV市场的不断扩大, 普通消费者对UAV通信系统的需求也与日俱增.在娱乐、摄影等领域, UAV已经成为了常见的工具, 而其通信系统的稳定性、传输速度等方面的提升, 将进一步满足用户对于UAV功能和性能的需求.UAV通信系统的发展不仅仅受益于UAV本身技术的进步, 同时也离不开通信技术的创新.随着5G、物联网、边缘计算等新一代通信技术的不断成熟[1 ] , UAV通信系统的性能将得到极大的提升, 从而为UAV的广泛应用打下更加坚实的基础. ...
A survey on mobile edge computing: the communication perspective
1
2017
... 另一方面, 随着信息技术的快速发展, 终端设备的数量不断增加.移动互联网服务的爆炸式增长催生了各种需要大量计算的应用程序, 如虚拟现实、增强现实、自动驾驶、人工智能、数据分析等应用.终端的计算任务对时延要求越来越高, 这给计算能力有限的终端用户带来了沉重的计算负担, 算力资源受限与低时延要求的矛盾越来越突出.现有的云计算面临着核心网传输时延过长的问题, 无法及时满足终端设备数据流量爆炸式增长的计算处理需求.而移动边缘计算(mobile edge computing, MEC)[2 ] 可以将云端的计算资源下沉到网络边缘, 减少核心网带宽占用, 为终端用户提供及时有效的计算服务, 降低任务计算时间.传统的MEC系统通常将MEC服务器部署于基站、接入点等网络边缘位置.由于其固定的架构, 存在灵活性差、部署成本高的问题.然而, 未来的网络不仅需要能够适应动态和异构的环境, 还应该能够以快速和高可靠的方式支持热点区域和临时的任务计算.最近研究表明, MEC服务器也可以搭载于UAV[3 ] .Axellio公司针对UAV开发出了一款轻量级边缘计算平台FabricXpress[4 ] . ...
加权能耗最小化的无人机辅助移动边缘计算资源分配策略
1
2022
... 另一方面, 随着信息技术的快速发展, 终端设备的数量不断增加.移动互联网服务的爆炸式增长催生了各种需要大量计算的应用程序, 如虚拟现实、增强现实、自动驾驶、人工智能、数据分析等应用.终端的计算任务对时延要求越来越高, 这给计算能力有限的终端用户带来了沉重的计算负担, 算力资源受限与低时延要求的矛盾越来越突出.现有的云计算面临着核心网传输时延过长的问题, 无法及时满足终端设备数据流量爆炸式增长的计算处理需求.而移动边缘计算(mobile edge computing, MEC)[2 ] 可以将云端的计算资源下沉到网络边缘, 减少核心网带宽占用, 为终端用户提供及时有效的计算服务, 降低任务计算时间.传统的MEC系统通常将MEC服务器部署于基站、接入点等网络边缘位置.由于其固定的架构, 存在灵活性差、部署成本高的问题.然而, 未来的网络不仅需要能够适应动态和异构的环境, 还应该能够以快速和高可靠的方式支持热点区域和临时的任务计算.最近研究表明, MEC服务器也可以搭载于UAV[3 ] .Axellio公司针对UAV开发出了一款轻量级边缘计算平台FabricXpress[4 ] . ...
Resource allocation for unmanned aerial vehicle-assisted mobile edge computing to minimize weighted energy consumption
1
2022
... 另一方面, 随着信息技术的快速发展, 终端设备的数量不断增加.移动互联网服务的爆炸式增长催生了各种需要大量计算的应用程序, 如虚拟现实、增强现实、自动驾驶、人工智能、数据分析等应用.终端的计算任务对时延要求越来越高, 这给计算能力有限的终端用户带来了沉重的计算负担, 算力资源受限与低时延要求的矛盾越来越突出.现有的云计算面临着核心网传输时延过长的问题, 无法及时满足终端设备数据流量爆炸式增长的计算处理需求.而移动边缘计算(mobile edge computing, MEC)[2 ] 可以将云端的计算资源下沉到网络边缘, 减少核心网带宽占用, 为终端用户提供及时有效的计算服务, 降低任务计算时间.传统的MEC系统通常将MEC服务器部署于基站、接入点等网络边缘位置.由于其固定的架构, 存在灵活性差、部署成本高的问题.然而, 未来的网络不仅需要能够适应动态和异构的环境, 还应该能够以快速和高可靠的方式支持热点区域和临时的任务计算.最近研究表明, MEC服务器也可以搭载于UAV[3 ] .Axellio公司针对UAV开发出了一款轻量级边缘计算平台FabricXpress[4 ] . ...
5G通信技术促进军用无人机发展
1
2019
... 另一方面, 随着信息技术的快速发展, 终端设备的数量不断增加.移动互联网服务的爆炸式增长催生了各种需要大量计算的应用程序, 如虚拟现实、增强现实、自动驾驶、人工智能、数据分析等应用.终端的计算任务对时延要求越来越高, 这给计算能力有限的终端用户带来了沉重的计算负担, 算力资源受限与低时延要求的矛盾越来越突出.现有的云计算面临着核心网传输时延过长的问题, 无法及时满足终端设备数据流量爆炸式增长的计算处理需求.而移动边缘计算(mobile edge computing, MEC)[2 ] 可以将云端的计算资源下沉到网络边缘, 减少核心网带宽占用, 为终端用户提供及时有效的计算服务, 降低任务计算时间.传统的MEC系统通常将MEC服务器部署于基站、接入点等网络边缘位置.由于其固定的架构, 存在灵活性差、部署成本高的问题.然而, 未来的网络不仅需要能够适应动态和异构的环境, 还应该能够以快速和高可靠的方式支持热点区域和临时的任务计算.最近研究表明, MEC服务器也可以搭载于UAV[3 ] .Axellio公司针对UAV开发出了一款轻量级边缘计算平台FabricXpress[4 ] . ...
5G communication technology boosts the development of military drones
1
2019
... 另一方面, 随着信息技术的快速发展, 终端设备的数量不断增加.移动互联网服务的爆炸式增长催生了各种需要大量计算的应用程序, 如虚拟现实、增强现实、自动驾驶、人工智能、数据分析等应用.终端的计算任务对时延要求越来越高, 这给计算能力有限的终端用户带来了沉重的计算负担, 算力资源受限与低时延要求的矛盾越来越突出.现有的云计算面临着核心网传输时延过长的问题, 无法及时满足终端设备数据流量爆炸式增长的计算处理需求.而移动边缘计算(mobile edge computing, MEC)[2 ] 可以将云端的计算资源下沉到网络边缘, 减少核心网带宽占用, 为终端用户提供及时有效的计算服务, 降低任务计算时间.传统的MEC系统通常将MEC服务器部署于基站、接入点等网络边缘位置.由于其固定的架构, 存在灵活性差、部署成本高的问题.然而, 未来的网络不仅需要能够适应动态和异构的环境, 还应该能够以快速和高可靠的方式支持热点区域和临时的任务计算.最近研究表明, MEC服务器也可以搭载于UAV[3 ] .Axellio公司针对UAV开发出了一款轻量级边缘计算平台FabricXpress[4 ] . ...
基于无人机辅助边缘计算系统的节能卸载策略
1
2022
... 相较于传统的地面MEC网络, UAV辅助的MEC(UAV-MEC)网络有以下优势: ① UAV可以在荒野、沙漠、受灾地域、军事行动等多数情况下灵活部署.② UAV能够与地面用户、基站建立视距链路(line of sight, LoS)[5 ] , 从而扩大服务覆盖范围、提高数据传输的稳定性和可靠性, 并有助于提高计算性能.③ UAV的移动性能够适应用户设备数量、位置和服务需求的不断变化, 从而为移动用户提供无缝计算服务, 保证计算服务的连续性, 并可为其他计算资源受限的UAV提供支持.此外, 在UAV进行搜索和救援时, 处理图像所需的计算能力和存储能力较强, 以人脸识别为代表的任务需求需要实时上传视频并进行决策.对于计算能力有限的UAV, 可以将这些计算密集型任务转移至MEC服务器、空闲的UAV、地面基站或接入点. ...
Energy efficient offloading strategy for UAV aided edgecomputing systems
1
2022
... 相较于传统的地面MEC网络, UAV辅助的MEC(UAV-MEC)网络有以下优势: ① UAV可以在荒野、沙漠、受灾地域、军事行动等多数情况下灵活部署.② UAV能够与地面用户、基站建立视距链路(line of sight, LoS)[5 ] , 从而扩大服务覆盖范围、提高数据传输的稳定性和可靠性, 并有助于提高计算性能.③ UAV的移动性能够适应用户设备数量、位置和服务需求的不断变化, 从而为移动用户提供无缝计算服务, 保证计算服务的连续性, 并可为其他计算资源受限的UAV提供支持.此外, 在UAV进行搜索和救援时, 处理图像所需的计算能力和存储能力较强, 以人脸识别为代表的任务需求需要实时上传视频并进行决策.对于计算能力有限的UAV, 可以将这些计算密集型任务转移至MEC服务器、空闲的UAV、地面基站或接入点. ...
Multiple access in aerial networks: from orthogonal and non-orthogonal to rate-splitting
2
2020
... 目前, 已经有一些关于UAV和边缘计算的相关研究综述文章.在UAV的综述中, 文献[6 ]对UAV网络中多种接入技术进行全面的总结与对比.文献[7 ]回顾非正交多址接入(non-orthogonal multiple access, NOMA)在UAV网络中的应用.在边缘计算的综述中, 文献[8 ]提出MEC技术的实现依赖于网络功能虚拟化(network function virtualization, NFV)和软件定义网络(software defined network, SDN), 并将虚拟化的资源通过虚拟功能网元(virtual network function, VNF)执行.文献[9 ]针对MEC中的计算卸载方案进行分析总结.在UAV-MEC网络的综述中, 文献[10 ]简要介绍UAV-MEC网络的体系架构、任务卸载的工作原理、计算卸载时采用的不同接入方案.文献[11 ]提出一种融合UAV和边缘计算的网络架构, 并简单分析总结多用户接入技术与计算卸载策略.文献[12 ]探索一种基于SDN的UAV-MEC框架.文献[13 ]对UAV-MEC网络的资源优化问题进行综述, 提出基于软件定义UAV网络的总体架构.文献[14 ]中简要概述UAV搭载MEC设备的基本网络架构, 重点对现有的卸载算法进行了调查和分析对比.文献[15 ]总结多UAV-MEC网络中多址接入与计算卸载决策.文献[16 ]总结利用智能方法解决UAV-MEC网络中以最小化能耗、最小化时延、最大化任务处理数为目标的资源优化问题.限于篇幅和侧重点, 上述综述文章只是简单地介绍UAV-MEC网络中的技术架构和多用户接入方案.本文的创新之处在于针对UAV-MEC网络的技术架构进行详细的介绍, 从多用户接入的角度出发, 详细对比多种接入方案, 并分析其对计算卸载时延与能耗性能的影响, 给出多种最新的计算卸载策略.通过详细描述UAV-MEC网络的技术架构, 更好地了解该网络的组成部分.通过对比不同的接入方案, 综述给出对计算卸载性能的影响, 为读者提供了深入分析、选择接入方案和计算卸载策略的依据.本文首先总结UAV-MEC网络的技术架构以及应用场景, 然后从多址接入方案、计算卸载策略这两方面介绍和分析网络中的关键技术, 最后将会探讨未来的挑战以及发展方向. ...
... 在传统的UAV和边缘计算网络[6 ] 中通常采用OMA方式, 包括时分多址(time division multiple access, TDMA), 频分多址(frequency division multiple access, FDMA), 正交FDMA(orthogonal FDMA, OFDMA), 码分多址(code division multiple access, CDMA) 和空分多址(space division multiple access, SDMA).在TDMA中, 不同的时隙被分配给与UAV通信的不同用户.在FDMA和OFDMA中, 不同的频带或正交的子载波被分配给用户[19 ] , 而在CDMA中, 不同的设备有不同的正交码.在SDMA中, 使用波束成形对用户组进行空间分离, 为每个组提供全时间或频率资源.图 4 为UAV-MEC网络中全向天线与SDMA的示意图, 其中UAV采用全向天线与多设备进行通信时, 会在其他资源域进行多用户的区分, 具体如图 5 所示. ...
Application of NOMA for cellular-connected UAVs: opportunities and challenges
1
2021
... 目前, 已经有一些关于UAV和边缘计算的相关研究综述文章.在UAV的综述中, 文献[6 ]对UAV网络中多种接入技术进行全面的总结与对比.文献[7 ]回顾非正交多址接入(non-orthogonal multiple access, NOMA)在UAV网络中的应用.在边缘计算的综述中, 文献[8 ]提出MEC技术的实现依赖于网络功能虚拟化(network function virtualization, NFV)和软件定义网络(software defined network, SDN), 并将虚拟化的资源通过虚拟功能网元(virtual network function, VNF)执行.文献[9 ]针对MEC中的计算卸载方案进行分析总结.在UAV-MEC网络的综述中, 文献[10 ]简要介绍UAV-MEC网络的体系架构、任务卸载的工作原理、计算卸载时采用的不同接入方案.文献[11 ]提出一种融合UAV和边缘计算的网络架构, 并简单分析总结多用户接入技术与计算卸载策略.文献[12 ]探索一种基于SDN的UAV-MEC框架.文献[13 ]对UAV-MEC网络的资源优化问题进行综述, 提出基于软件定义UAV网络的总体架构.文献[14 ]中简要概述UAV搭载MEC设备的基本网络架构, 重点对现有的卸载算法进行了调查和分析对比.文献[15 ]总结多UAV-MEC网络中多址接入与计算卸载决策.文献[16 ]总结利用智能方法解决UAV-MEC网络中以最小化能耗、最小化时延、最大化任务处理数为目标的资源优化问题.限于篇幅和侧重点, 上述综述文章只是简单地介绍UAV-MEC网络中的技术架构和多用户接入方案.本文的创新之处在于针对UAV-MEC网络的技术架构进行详细的介绍, 从多用户接入的角度出发, 详细对比多种接入方案, 并分析其对计算卸载时延与能耗性能的影响, 给出多种最新的计算卸载策略.通过详细描述UAV-MEC网络的技术架构, 更好地了解该网络的组成部分.通过对比不同的接入方案, 综述给出对计算卸载性能的影响, 为读者提供了深入分析、选择接入方案和计算卸载策略的依据.本文首先总结UAV-MEC网络的技术架构以及应用场景, 然后从多址接入方案、计算卸载策略这两方面介绍和分析网络中的关键技术, 最后将会探讨未来的挑战以及发展方向. ...
移动边缘计算综述
1
2018
... 目前, 已经有一些关于UAV和边缘计算的相关研究综述文章.在UAV的综述中, 文献[6 ]对UAV网络中多种接入技术进行全面的总结与对比.文献[7 ]回顾非正交多址接入(non-orthogonal multiple access, NOMA)在UAV网络中的应用.在边缘计算的综述中, 文献[8 ]提出MEC技术的实现依赖于网络功能虚拟化(network function virtualization, NFV)和软件定义网络(software defined network, SDN), 并将虚拟化的资源通过虚拟功能网元(virtual network function, VNF)执行.文献[9 ]针对MEC中的计算卸载方案进行分析总结.在UAV-MEC网络的综述中, 文献[10 ]简要介绍UAV-MEC网络的体系架构、任务卸载的工作原理、计算卸载时采用的不同接入方案.文献[11 ]提出一种融合UAV和边缘计算的网络架构, 并简单分析总结多用户接入技术与计算卸载策略.文献[12 ]探索一种基于SDN的UAV-MEC框架.文献[13 ]对UAV-MEC网络的资源优化问题进行综述, 提出基于软件定义UAV网络的总体架构.文献[14 ]中简要概述UAV搭载MEC设备的基本网络架构, 重点对现有的卸载算法进行了调查和分析对比.文献[15 ]总结多UAV-MEC网络中多址接入与计算卸载决策.文献[16 ]总结利用智能方法解决UAV-MEC网络中以最小化能耗、最小化时延、最大化任务处理数为目标的资源优化问题.限于篇幅和侧重点, 上述综述文章只是简单地介绍UAV-MEC网络中的技术架构和多用户接入方案.本文的创新之处在于针对UAV-MEC网络的技术架构进行详细的介绍, 从多用户接入的角度出发, 详细对比多种接入方案, 并分析其对计算卸载时延与能耗性能的影响, 给出多种最新的计算卸载策略.通过详细描述UAV-MEC网络的技术架构, 更好地了解该网络的组成部分.通过对比不同的接入方案, 综述给出对计算卸载性能的影响, 为读者提供了深入分析、选择接入方案和计算卸载策略的依据.本文首先总结UAV-MEC网络的技术架构以及应用场景, 然后从多址接入方案、计算卸载策略这两方面介绍和分析网络中的关键技术, 最后将会探讨未来的挑战以及发展方向. ...
A survey of mobile edge computing
1
2018
... 目前, 已经有一些关于UAV和边缘计算的相关研究综述文章.在UAV的综述中, 文献[6 ]对UAV网络中多种接入技术进行全面的总结与对比.文献[7 ]回顾非正交多址接入(non-orthogonal multiple access, NOMA)在UAV网络中的应用.在边缘计算的综述中, 文献[8 ]提出MEC技术的实现依赖于网络功能虚拟化(network function virtualization, NFV)和软件定义网络(software defined network, SDN), 并将虚拟化的资源通过虚拟功能网元(virtual network function, VNF)执行.文献[9 ]针对MEC中的计算卸载方案进行分析总结.在UAV-MEC网络的综述中, 文献[10 ]简要介绍UAV-MEC网络的体系架构、任务卸载的工作原理、计算卸载时采用的不同接入方案.文献[11 ]提出一种融合UAV和边缘计算的网络架构, 并简单分析总结多用户接入技术与计算卸载策略.文献[12 ]探索一种基于SDN的UAV-MEC框架.文献[13 ]对UAV-MEC网络的资源优化问题进行综述, 提出基于软件定义UAV网络的总体架构.文献[14 ]中简要概述UAV搭载MEC设备的基本网络架构, 重点对现有的卸载算法进行了调查和分析对比.文献[15 ]总结多UAV-MEC网络中多址接入与计算卸载决策.文献[16 ]总结利用智能方法解决UAV-MEC网络中以最小化能耗、最小化时延、最大化任务处理数为目标的资源优化问题.限于篇幅和侧重点, 上述综述文章只是简单地介绍UAV-MEC网络中的技术架构和多用户接入方案.本文的创新之处在于针对UAV-MEC网络的技术架构进行详细的介绍, 从多用户接入的角度出发, 详细对比多种接入方案, 并分析其对计算卸载时延与能耗性能的影响, 给出多种最新的计算卸载策略.通过详细描述UAV-MEC网络的技术架构, 更好地了解该网络的组成部分.通过对比不同的接入方案, 综述给出对计算卸载性能的影响, 为读者提供了深入分析、选择接入方案和计算卸载策略的依据.本文首先总结UAV-MEC网络的技术架构以及应用场景, 然后从多址接入方案、计算卸载策略这两方面介绍和分析网络中的关键技术, 最后将会探讨未来的挑战以及发展方向. ...
移动边缘计算中计算卸载方案研究综述
1
2021
... 目前, 已经有一些关于UAV和边缘计算的相关研究综述文章.在UAV的综述中, 文献[6 ]对UAV网络中多种接入技术进行全面的总结与对比.文献[7 ]回顾非正交多址接入(non-orthogonal multiple access, NOMA)在UAV网络中的应用.在边缘计算的综述中, 文献[8 ]提出MEC技术的实现依赖于网络功能虚拟化(network function virtualization, NFV)和软件定义网络(software defined network, SDN), 并将虚拟化的资源通过虚拟功能网元(virtual network function, VNF)执行.文献[9 ]针对MEC中的计算卸载方案进行分析总结.在UAV-MEC网络的综述中, 文献[10 ]简要介绍UAV-MEC网络的体系架构、任务卸载的工作原理、计算卸载时采用的不同接入方案.文献[11 ]提出一种融合UAV和边缘计算的网络架构, 并简单分析总结多用户接入技术与计算卸载策略.文献[12 ]探索一种基于SDN的UAV-MEC框架.文献[13 ]对UAV-MEC网络的资源优化问题进行综述, 提出基于软件定义UAV网络的总体架构.文献[14 ]中简要概述UAV搭载MEC设备的基本网络架构, 重点对现有的卸载算法进行了调查和分析对比.文献[15 ]总结多UAV-MEC网络中多址接入与计算卸载决策.文献[16 ]总结利用智能方法解决UAV-MEC网络中以最小化能耗、最小化时延、最大化任务处理数为目标的资源优化问题.限于篇幅和侧重点, 上述综述文章只是简单地介绍UAV-MEC网络中的技术架构和多用户接入方案.本文的创新之处在于针对UAV-MEC网络的技术架构进行详细的介绍, 从多用户接入的角度出发, 详细对比多种接入方案, 并分析其对计算卸载时延与能耗性能的影响, 给出多种最新的计算卸载策略.通过详细描述UAV-MEC网络的技术架构, 更好地了解该网络的组成部分.通过对比不同的接入方案, 综述给出对计算卸载性能的影响, 为读者提供了深入分析、选择接入方案和计算卸载策略的依据.本文首先总结UAV-MEC网络的技术架构以及应用场景, 然后从多址接入方案、计算卸载策略这两方面介绍和分析网络中的关键技术, 最后将会探讨未来的挑战以及发展方向. ...
Survey on the methods of computation offloading in mobile edge computing
1
2021
... 目前, 已经有一些关于UAV和边缘计算的相关研究综述文章.在UAV的综述中, 文献[6 ]对UAV网络中多种接入技术进行全面的总结与对比.文献[7 ]回顾非正交多址接入(non-orthogonal multiple access, NOMA)在UAV网络中的应用.在边缘计算的综述中, 文献[8 ]提出MEC技术的实现依赖于网络功能虚拟化(network function virtualization, NFV)和软件定义网络(software defined network, SDN), 并将虚拟化的资源通过虚拟功能网元(virtual network function, VNF)执行.文献[9 ]针对MEC中的计算卸载方案进行分析总结.在UAV-MEC网络的综述中, 文献[10 ]简要介绍UAV-MEC网络的体系架构、任务卸载的工作原理、计算卸载时采用的不同接入方案.文献[11 ]提出一种融合UAV和边缘计算的网络架构, 并简单分析总结多用户接入技术与计算卸载策略.文献[12 ]探索一种基于SDN的UAV-MEC框架.文献[13 ]对UAV-MEC网络的资源优化问题进行综述, 提出基于软件定义UAV网络的总体架构.文献[14 ]中简要概述UAV搭载MEC设备的基本网络架构, 重点对现有的卸载算法进行了调查和分析对比.文献[15 ]总结多UAV-MEC网络中多址接入与计算卸载决策.文献[16 ]总结利用智能方法解决UAV-MEC网络中以最小化能耗、最小化时延、最大化任务处理数为目标的资源优化问题.限于篇幅和侧重点, 上述综述文章只是简单地介绍UAV-MEC网络中的技术架构和多用户接入方案.本文的创新之处在于针对UAV-MEC网络的技术架构进行详细的介绍, 从多用户接入的角度出发, 详细对比多种接入方案, 并分析其对计算卸载时延与能耗性能的影响, 给出多种最新的计算卸载策略.通过详细描述UAV-MEC网络的技术架构, 更好地了解该网络的组成部分.通过对比不同的接入方案, 综述给出对计算卸载性能的影响, 为读者提供了深入分析、选择接入方案和计算卸载策略的依据.本文首先总结UAV-MEC网络的技术架构以及应用场景, 然后从多址接入方案、计算卸载策略这两方面介绍和分析网络中的关键技术, 最后将会探讨未来的挑战以及发展方向. ...
Energy efficient UAV-enabled mobile edge computing for IoT devices: a review
1
2021
... 目前, 已经有一些关于UAV和边缘计算的相关研究综述文章.在UAV的综述中, 文献[6 ]对UAV网络中多种接入技术进行全面的总结与对比.文献[7 ]回顾非正交多址接入(non-orthogonal multiple access, NOMA)在UAV网络中的应用.在边缘计算的综述中, 文献[8 ]提出MEC技术的实现依赖于网络功能虚拟化(network function virtualization, NFV)和软件定义网络(software defined network, SDN), 并将虚拟化的资源通过虚拟功能网元(virtual network function, VNF)执行.文献[9 ]针对MEC中的计算卸载方案进行分析总结.在UAV-MEC网络的综述中, 文献[10 ]简要介绍UAV-MEC网络的体系架构、任务卸载的工作原理、计算卸载时采用的不同接入方案.文献[11 ]提出一种融合UAV和边缘计算的网络架构, 并简单分析总结多用户接入技术与计算卸载策略.文献[12 ]探索一种基于SDN的UAV-MEC框架.文献[13 ]对UAV-MEC网络的资源优化问题进行综述, 提出基于软件定义UAV网络的总体架构.文献[14 ]中简要概述UAV搭载MEC设备的基本网络架构, 重点对现有的卸载算法进行了调查和分析对比.文献[15 ]总结多UAV-MEC网络中多址接入与计算卸载决策.文献[16 ]总结利用智能方法解决UAV-MEC网络中以最小化能耗、最小化时延、最大化任务处理数为目标的资源优化问题.限于篇幅和侧重点, 上述综述文章只是简单地介绍UAV-MEC网络中的技术架构和多用户接入方案.本文的创新之处在于针对UAV-MEC网络的技术架构进行详细的介绍, 从多用户接入的角度出发, 详细对比多种接入方案, 并分析其对计算卸载时延与能耗性能的影响, 给出多种最新的计算卸载策略.通过详细描述UAV-MEC网络的技术架构, 更好地了解该网络的组成部分.通过对比不同的接入方案, 综述给出对计算卸载性能的影响, 为读者提供了深入分析、选择接入方案和计算卸载策略的依据.本文首先总结UAV-MEC网络的技术架构以及应用场景, 然后从多址接入方案、计算卸载策略这两方面介绍和分析网络中的关键技术, 最后将会探讨未来的挑战以及发展方向. ...
无人机边缘计算网络: 架构, 关键技术与挑战
2
2021
... 目前, 已经有一些关于UAV和边缘计算的相关研究综述文章.在UAV的综述中, 文献[6 ]对UAV网络中多种接入技术进行全面的总结与对比.文献[7 ]回顾非正交多址接入(non-orthogonal multiple access, NOMA)在UAV网络中的应用.在边缘计算的综述中, 文献[8 ]提出MEC技术的实现依赖于网络功能虚拟化(network function virtualization, NFV)和软件定义网络(software defined network, SDN), 并将虚拟化的资源通过虚拟功能网元(virtual network function, VNF)执行.文献[9 ]针对MEC中的计算卸载方案进行分析总结.在UAV-MEC网络的综述中, 文献[10 ]简要介绍UAV-MEC网络的体系架构、任务卸载的工作原理、计算卸载时采用的不同接入方案.文献[11 ]提出一种融合UAV和边缘计算的网络架构, 并简单分析总结多用户接入技术与计算卸载策略.文献[12 ]探索一种基于SDN的UAV-MEC框架.文献[13 ]对UAV-MEC网络的资源优化问题进行综述, 提出基于软件定义UAV网络的总体架构.文献[14 ]中简要概述UAV搭载MEC设备的基本网络架构, 重点对现有的卸载算法进行了调查和分析对比.文献[15 ]总结多UAV-MEC网络中多址接入与计算卸载决策.文献[16 ]总结利用智能方法解决UAV-MEC网络中以最小化能耗、最小化时延、最大化任务处理数为目标的资源优化问题.限于篇幅和侧重点, 上述综述文章只是简单地介绍UAV-MEC网络中的技术架构和多用户接入方案.本文的创新之处在于针对UAV-MEC网络的技术架构进行详细的介绍, 从多用户接入的角度出发, 详细对比多种接入方案, 并分析其对计算卸载时延与能耗性能的影响, 给出多种最新的计算卸载策略.通过详细描述UAV-MEC网络的技术架构, 更好地了解该网络的组成部分.通过对比不同的接入方案, 综述给出对计算卸载性能的影响, 为读者提供了深入分析、选择接入方案和计算卸载策略的依据.本文首先总结UAV-MEC网络的技术架构以及应用场景, 然后从多址接入方案、计算卸载策略这两方面介绍和分析网络中的关键技术, 最后将会探讨未来的挑战以及发展方向. ...
... 利用NFV技术, 配备MEC服务器的UAV可以通过创建多个虚拟机或轻量级的容器, 实现有效的计算资源虚拟化分割, 为多个终端设备的不同类型任务提供计算服务.文献[17 ]提出了通过NFV技术, 优化UAV的部署和飞行控制, 确保UAV提供服务的可靠性和用户服务质量(quality of service, QoS)需求.借鉴文献[11 -12 ]的思想, 本文提出UAV-MEC网络可以虚拟化为物理层、虚拟化资源层、VNF控制层和编排器层.物理层是机载的MEC服务器网络、计算、存储平台.虚拟化资源层将硬件平台资源抽象为虚拟化的资源.VNF控制层是通过VNF进行虚拟化计算、存储资源的管理与调度.编排器层是对虚拟化的容器进行编排, 使之能够顺利地接收终端设备的计算任务, 并及时调整计算资源的分配. ...
Edge computing networks for unmanned aerial vehicles: architecture, key technologies and challenges
2
2021
... 目前, 已经有一些关于UAV和边缘计算的相关研究综述文章.在UAV的综述中, 文献[6 ]对UAV网络中多种接入技术进行全面的总结与对比.文献[7 ]回顾非正交多址接入(non-orthogonal multiple access, NOMA)在UAV网络中的应用.在边缘计算的综述中, 文献[8 ]提出MEC技术的实现依赖于网络功能虚拟化(network function virtualization, NFV)和软件定义网络(software defined network, SDN), 并将虚拟化的资源通过虚拟功能网元(virtual network function, VNF)执行.文献[9 ]针对MEC中的计算卸载方案进行分析总结.在UAV-MEC网络的综述中, 文献[10 ]简要介绍UAV-MEC网络的体系架构、任务卸载的工作原理、计算卸载时采用的不同接入方案.文献[11 ]提出一种融合UAV和边缘计算的网络架构, 并简单分析总结多用户接入技术与计算卸载策略.文献[12 ]探索一种基于SDN的UAV-MEC框架.文献[13 ]对UAV-MEC网络的资源优化问题进行综述, 提出基于软件定义UAV网络的总体架构.文献[14 ]中简要概述UAV搭载MEC设备的基本网络架构, 重点对现有的卸载算法进行了调查和分析对比.文献[15 ]总结多UAV-MEC网络中多址接入与计算卸载决策.文献[16 ]总结利用智能方法解决UAV-MEC网络中以最小化能耗、最小化时延、最大化任务处理数为目标的资源优化问题.限于篇幅和侧重点, 上述综述文章只是简单地介绍UAV-MEC网络中的技术架构和多用户接入方案.本文的创新之处在于针对UAV-MEC网络的技术架构进行详细的介绍, 从多用户接入的角度出发, 详细对比多种接入方案, 并分析其对计算卸载时延与能耗性能的影响, 给出多种最新的计算卸载策略.通过详细描述UAV-MEC网络的技术架构, 更好地了解该网络的组成部分.通过对比不同的接入方案, 综述给出对计算卸载性能的影响, 为读者提供了深入分析、选择接入方案和计算卸载策略的依据.本文首先总结UAV-MEC网络的技术架构以及应用场景, 然后从多址接入方案、计算卸载策略这两方面介绍和分析网络中的关键技术, 最后将会探讨未来的挑战以及发展方向. ...
... 利用NFV技术, 配备MEC服务器的UAV可以通过创建多个虚拟机或轻量级的容器, 实现有效的计算资源虚拟化分割, 为多个终端设备的不同类型任务提供计算服务.文献[17 ]提出了通过NFV技术, 优化UAV的部署和飞行控制, 确保UAV提供服务的可靠性和用户服务质量(quality of service, QoS)需求.借鉴文献[11 -12 ]的思想, 本文提出UAV-MEC网络可以虚拟化为物理层、虚拟化资源层、VNF控制层和编排器层.物理层是机载的MEC服务器网络、计算、存储平台.虚拟化资源层将硬件平台资源抽象为虚拟化的资源.VNF控制层是通过VNF进行虚拟化计算、存储资源的管理与调度.编排器层是对虚拟化的容器进行编排, 使之能够顺利地接收终端设备的计算任务, 并及时调整计算资源的分配. ...
基于无人机移动边缘计算的软件定义网络架构分析
3
2020
... 目前, 已经有一些关于UAV和边缘计算的相关研究综述文章.在UAV的综述中, 文献[6 ]对UAV网络中多种接入技术进行全面的总结与对比.文献[7 ]回顾非正交多址接入(non-orthogonal multiple access, NOMA)在UAV网络中的应用.在边缘计算的综述中, 文献[8 ]提出MEC技术的实现依赖于网络功能虚拟化(network function virtualization, NFV)和软件定义网络(software defined network, SDN), 并将虚拟化的资源通过虚拟功能网元(virtual network function, VNF)执行.文献[9 ]针对MEC中的计算卸载方案进行分析总结.在UAV-MEC网络的综述中, 文献[10 ]简要介绍UAV-MEC网络的体系架构、任务卸载的工作原理、计算卸载时采用的不同接入方案.文献[11 ]提出一种融合UAV和边缘计算的网络架构, 并简单分析总结多用户接入技术与计算卸载策略.文献[12 ]探索一种基于SDN的UAV-MEC框架.文献[13 ]对UAV-MEC网络的资源优化问题进行综述, 提出基于软件定义UAV网络的总体架构.文献[14 ]中简要概述UAV搭载MEC设备的基本网络架构, 重点对现有的卸载算法进行了调查和分析对比.文献[15 ]总结多UAV-MEC网络中多址接入与计算卸载决策.文献[16 ]总结利用智能方法解决UAV-MEC网络中以最小化能耗、最小化时延、最大化任务处理数为目标的资源优化问题.限于篇幅和侧重点, 上述综述文章只是简单地介绍UAV-MEC网络中的技术架构和多用户接入方案.本文的创新之处在于针对UAV-MEC网络的技术架构进行详细的介绍, 从多用户接入的角度出发, 详细对比多种接入方案, 并分析其对计算卸载时延与能耗性能的影响, 给出多种最新的计算卸载策略.通过详细描述UAV-MEC网络的技术架构, 更好地了解该网络的组成部分.通过对比不同的接入方案, 综述给出对计算卸载性能的影响, 为读者提供了深入分析、选择接入方案和计算卸载策略的依据.本文首先总结UAV-MEC网络的技术架构以及应用场景, 然后从多址接入方案、计算卸载策略这两方面介绍和分析网络中的关键技术, 最后将会探讨未来的挑战以及发展方向. ...
... 利用NFV技术, 配备MEC服务器的UAV可以通过创建多个虚拟机或轻量级的容器, 实现有效的计算资源虚拟化分割, 为多个终端设备的不同类型任务提供计算服务.文献[17 ]提出了通过NFV技术, 优化UAV的部署和飞行控制, 确保UAV提供服务的可靠性和用户服务质量(quality of service, QoS)需求.借鉴文献[11 -12 ]的思想, 本文提出UAV-MEC网络可以虚拟化为物理层、虚拟化资源层、VNF控制层和编排器层.物理层是机载的MEC服务器网络、计算、存储平台.虚拟化资源层将硬件平台资源抽象为虚拟化的资源.VNF控制层是通过VNF进行虚拟化计算、存储资源的管理与调度.编排器层是对虚拟化的容器进行编排, 使之能够顺利地接收终端设备的计算任务, 并及时调整计算资源的分配. ...
... 通过SDN, 能够有效地管理网络资源, 降低UAV负载, 实现对UAV节点进行集中控制.根据文献[12 ]所述, UAV集群中的通信、计算和存储资源通过NFV虚拟成UAV-MEC网络的资源池.SDN的南向接口负责与数据平面(即虚拟的资源池)进行通信, 为SDN控制器收集关于系统整体状态信息, 包括计算任务、UAV和MEC服务器之间的通信和计算资源.SDN控制器部署于UAV集群的簇头位置, 负责管理整体的资源分配、任务卸载、轨迹规划等功能.SDN的北向接口负责与应用平面(即资源池的分配, UAV动作)进行通信, 分发控制指令.应用平面执行相应的动作.在UAV-MEC网络中, SDN控制器可划分为通信模块、计算模块、缓存模块、移动性管理模块、轨迹优化模块和任务调度模块. ...
Architecture analysis of software-defined network for UAV-based mobile edge computing
3
2020
... 目前, 已经有一些关于UAV和边缘计算的相关研究综述文章.在UAV的综述中, 文献[6 ]对UAV网络中多种接入技术进行全面的总结与对比.文献[7 ]回顾非正交多址接入(non-orthogonal multiple access, NOMA)在UAV网络中的应用.在边缘计算的综述中, 文献[8 ]提出MEC技术的实现依赖于网络功能虚拟化(network function virtualization, NFV)和软件定义网络(software defined network, SDN), 并将虚拟化的资源通过虚拟功能网元(virtual network function, VNF)执行.文献[9 ]针对MEC中的计算卸载方案进行分析总结.在UAV-MEC网络的综述中, 文献[10 ]简要介绍UAV-MEC网络的体系架构、任务卸载的工作原理、计算卸载时采用的不同接入方案.文献[11 ]提出一种融合UAV和边缘计算的网络架构, 并简单分析总结多用户接入技术与计算卸载策略.文献[12 ]探索一种基于SDN的UAV-MEC框架.文献[13 ]对UAV-MEC网络的资源优化问题进行综述, 提出基于软件定义UAV网络的总体架构.文献[14 ]中简要概述UAV搭载MEC设备的基本网络架构, 重点对现有的卸载算法进行了调查和分析对比.文献[15 ]总结多UAV-MEC网络中多址接入与计算卸载决策.文献[16 ]总结利用智能方法解决UAV-MEC网络中以最小化能耗、最小化时延、最大化任务处理数为目标的资源优化问题.限于篇幅和侧重点, 上述综述文章只是简单地介绍UAV-MEC网络中的技术架构和多用户接入方案.本文的创新之处在于针对UAV-MEC网络的技术架构进行详细的介绍, 从多用户接入的角度出发, 详细对比多种接入方案, 并分析其对计算卸载时延与能耗性能的影响, 给出多种最新的计算卸载策略.通过详细描述UAV-MEC网络的技术架构, 更好地了解该网络的组成部分.通过对比不同的接入方案, 综述给出对计算卸载性能的影响, 为读者提供了深入分析、选择接入方案和计算卸载策略的依据.本文首先总结UAV-MEC网络的技术架构以及应用场景, 然后从多址接入方案、计算卸载策略这两方面介绍和分析网络中的关键技术, 最后将会探讨未来的挑战以及发展方向. ...
... 利用NFV技术, 配备MEC服务器的UAV可以通过创建多个虚拟机或轻量级的容器, 实现有效的计算资源虚拟化分割, 为多个终端设备的不同类型任务提供计算服务.文献[17 ]提出了通过NFV技术, 优化UAV的部署和飞行控制, 确保UAV提供服务的可靠性和用户服务质量(quality of service, QoS)需求.借鉴文献[11 -12 ]的思想, 本文提出UAV-MEC网络可以虚拟化为物理层、虚拟化资源层、VNF控制层和编排器层.物理层是机载的MEC服务器网络、计算、存储平台.虚拟化资源层将硬件平台资源抽象为虚拟化的资源.VNF控制层是通过VNF进行虚拟化计算、存储资源的管理与调度.编排器层是对虚拟化的容器进行编排, 使之能够顺利地接收终端设备的计算任务, 并及时调整计算资源的分配. ...
... 通过SDN, 能够有效地管理网络资源, 降低UAV负载, 实现对UAV节点进行集中控制.根据文献[12 ]所述, UAV集群中的通信、计算和存储资源通过NFV虚拟成UAV-MEC网络的资源池.SDN的南向接口负责与数据平面(即虚拟的资源池)进行通信, 为SDN控制器收集关于系统整体状态信息, 包括计算任务、UAV和MEC服务器之间的通信和计算资源.SDN控制器部署于UAV集群的簇头位置, 负责管理整体的资源分配、任务卸载、轨迹规划等功能.SDN的北向接口负责与应用平面(即资源池的分配, UAV动作)进行通信, 分发控制指令.应用平面执行相应的动作.在UAV-MEC网络中, SDN控制器可划分为通信模块、计算模块、缓存模块、移动性管理模块、轨迹优化模块和任务调度模块. ...
Integrating mobile edge computing into unmanned aerial vehicle networks: an SDN-enabled architecture
1
2021
... 目前, 已经有一些关于UAV和边缘计算的相关研究综述文章.在UAV的综述中, 文献[6 ]对UAV网络中多种接入技术进行全面的总结与对比.文献[7 ]回顾非正交多址接入(non-orthogonal multiple access, NOMA)在UAV网络中的应用.在边缘计算的综述中, 文献[8 ]提出MEC技术的实现依赖于网络功能虚拟化(network function virtualization, NFV)和软件定义网络(software defined network, SDN), 并将虚拟化的资源通过虚拟功能网元(virtual network function, VNF)执行.文献[9 ]针对MEC中的计算卸载方案进行分析总结.在UAV-MEC网络的综述中, 文献[10 ]简要介绍UAV-MEC网络的体系架构、任务卸载的工作原理、计算卸载时采用的不同接入方案.文献[11 ]提出一种融合UAV和边缘计算的网络架构, 并简单分析总结多用户接入技术与计算卸载策略.文献[12 ]探索一种基于SDN的UAV-MEC框架.文献[13 ]对UAV-MEC网络的资源优化问题进行综述, 提出基于软件定义UAV网络的总体架构.文献[14 ]中简要概述UAV搭载MEC设备的基本网络架构, 重点对现有的卸载算法进行了调查和分析对比.文献[15 ]总结多UAV-MEC网络中多址接入与计算卸载决策.文献[16 ]总结利用智能方法解决UAV-MEC网络中以最小化能耗、最小化时延、最大化任务处理数为目标的资源优化问题.限于篇幅和侧重点, 上述综述文章只是简单地介绍UAV-MEC网络中的技术架构和多用户接入方案.本文的创新之处在于针对UAV-MEC网络的技术架构进行详细的介绍, 从多用户接入的角度出发, 详细对比多种接入方案, 并分析其对计算卸载时延与能耗性能的影响, 给出多种最新的计算卸载策略.通过详细描述UAV-MEC网络的技术架构, 更好地了解该网络的组成部分.通过对比不同的接入方案, 综述给出对计算卸载性能的影响, 为读者提供了深入分析、选择接入方案和计算卸载策略的依据.本文首先总结UAV-MEC网络的技术架构以及应用场景, 然后从多址接入方案、计算卸载策略这两方面介绍和分析网络中的关键技术, 最后将会探讨未来的挑战以及发展方向. ...
Survey on computation offloading in UAV-enabled mobile edge computing
1
2022
... 目前, 已经有一些关于UAV和边缘计算的相关研究综述文章.在UAV的综述中, 文献[6 ]对UAV网络中多种接入技术进行全面的总结与对比.文献[7 ]回顾非正交多址接入(non-orthogonal multiple access, NOMA)在UAV网络中的应用.在边缘计算的综述中, 文献[8 ]提出MEC技术的实现依赖于网络功能虚拟化(network function virtualization, NFV)和软件定义网络(software defined network, SDN), 并将虚拟化的资源通过虚拟功能网元(virtual network function, VNF)执行.文献[9 ]针对MEC中的计算卸载方案进行分析总结.在UAV-MEC网络的综述中, 文献[10 ]简要介绍UAV-MEC网络的体系架构、任务卸载的工作原理、计算卸载时采用的不同接入方案.文献[11 ]提出一种融合UAV和边缘计算的网络架构, 并简单分析总结多用户接入技术与计算卸载策略.文献[12 ]探索一种基于SDN的UAV-MEC框架.文献[13 ]对UAV-MEC网络的资源优化问题进行综述, 提出基于软件定义UAV网络的总体架构.文献[14 ]中简要概述UAV搭载MEC设备的基本网络架构, 重点对现有的卸载算法进行了调查和分析对比.文献[15 ]总结多UAV-MEC网络中多址接入与计算卸载决策.文献[16 ]总结利用智能方法解决UAV-MEC网络中以最小化能耗、最小化时延、最大化任务处理数为目标的资源优化问题.限于篇幅和侧重点, 上述综述文章只是简单地介绍UAV-MEC网络中的技术架构和多用户接入方案.本文的创新之处在于针对UAV-MEC网络的技术架构进行详细的介绍, 从多用户接入的角度出发, 详细对比多种接入方案, 并分析其对计算卸载时延与能耗性能的影响, 给出多种最新的计算卸载策略.通过详细描述UAV-MEC网络的技术架构, 更好地了解该网络的组成部分.通过对比不同的接入方案, 综述给出对计算卸载性能的影响, 为读者提供了深入分析、选择接入方案和计算卸载策略的依据.本文首先总结UAV-MEC网络的技术架构以及应用场景, 然后从多址接入方案、计算卸载策略这两方面介绍和分析网络中的关键技术, 最后将会探讨未来的挑战以及发展方向. ...
Multi-UAV network assisted intelligent edge computing: challenges and opportunities
1
2022
... 目前, 已经有一些关于UAV和边缘计算的相关研究综述文章.在UAV的综述中, 文献[6 ]对UAV网络中多种接入技术进行全面的总结与对比.文献[7 ]回顾非正交多址接入(non-orthogonal multiple access, NOMA)在UAV网络中的应用.在边缘计算的综述中, 文献[8 ]提出MEC技术的实现依赖于网络功能虚拟化(network function virtualization, NFV)和软件定义网络(software defined network, SDN), 并将虚拟化的资源通过虚拟功能网元(virtual network function, VNF)执行.文献[9 ]针对MEC中的计算卸载方案进行分析总结.在UAV-MEC网络的综述中, 文献[10 ]简要介绍UAV-MEC网络的体系架构、任务卸载的工作原理、计算卸载时采用的不同接入方案.文献[11 ]提出一种融合UAV和边缘计算的网络架构, 并简单分析总结多用户接入技术与计算卸载策略.文献[12 ]探索一种基于SDN的UAV-MEC框架.文献[13 ]对UAV-MEC网络的资源优化问题进行综述, 提出基于软件定义UAV网络的总体架构.文献[14 ]中简要概述UAV搭载MEC设备的基本网络架构, 重点对现有的卸载算法进行了调查和分析对比.文献[15 ]总结多UAV-MEC网络中多址接入与计算卸载决策.文献[16 ]总结利用智能方法解决UAV-MEC网络中以最小化能耗、最小化时延、最大化任务处理数为目标的资源优化问题.限于篇幅和侧重点, 上述综述文章只是简单地介绍UAV-MEC网络中的技术架构和多用户接入方案.本文的创新之处在于针对UAV-MEC网络的技术架构进行详细的介绍, 从多用户接入的角度出发, 详细对比多种接入方案, 并分析其对计算卸载时延与能耗性能的影响, 给出多种最新的计算卸载策略.通过详细描述UAV-MEC网络的技术架构, 更好地了解该网络的组成部分.通过对比不同的接入方案, 综述给出对计算卸载性能的影响, 为读者提供了深入分析、选择接入方案和计算卸载策略的依据.本文首先总结UAV-MEC网络的技术架构以及应用场景, 然后从多址接入方案、计算卸载策略这两方面介绍和分析网络中的关键技术, 最后将会探讨未来的挑战以及发展方向. ...
基于无人机的边缘智能计算研究综述
1
2020
... 目前, 已经有一些关于UAV和边缘计算的相关研究综述文章.在UAV的综述中, 文献[6 ]对UAV网络中多种接入技术进行全面的总结与对比.文献[7 ]回顾非正交多址接入(non-orthogonal multiple access, NOMA)在UAV网络中的应用.在边缘计算的综述中, 文献[8 ]提出MEC技术的实现依赖于网络功能虚拟化(network function virtualization, NFV)和软件定义网络(software defined network, SDN), 并将虚拟化的资源通过虚拟功能网元(virtual network function, VNF)执行.文献[9 ]针对MEC中的计算卸载方案进行分析总结.在UAV-MEC网络的综述中, 文献[10 ]简要介绍UAV-MEC网络的体系架构、任务卸载的工作原理、计算卸载时采用的不同接入方案.文献[11 ]提出一种融合UAV和边缘计算的网络架构, 并简单分析总结多用户接入技术与计算卸载策略.文献[12 ]探索一种基于SDN的UAV-MEC框架.文献[13 ]对UAV-MEC网络的资源优化问题进行综述, 提出基于软件定义UAV网络的总体架构.文献[14 ]中简要概述UAV搭载MEC设备的基本网络架构, 重点对现有的卸载算法进行了调查和分析对比.文献[15 ]总结多UAV-MEC网络中多址接入与计算卸载决策.文献[16 ]总结利用智能方法解决UAV-MEC网络中以最小化能耗、最小化时延、最大化任务处理数为目标的资源优化问题.限于篇幅和侧重点, 上述综述文章只是简单地介绍UAV-MEC网络中的技术架构和多用户接入方案.本文的创新之处在于针对UAV-MEC网络的技术架构进行详细的介绍, 从多用户接入的角度出发, 详细对比多种接入方案, 并分析其对计算卸载时延与能耗性能的影响, 给出多种最新的计算卸载策略.通过详细描述UAV-MEC网络的技术架构, 更好地了解该网络的组成部分.通过对比不同的接入方案, 综述给出对计算卸载性能的影响, 为读者提供了深入分析、选择接入方案和计算卸载策略的依据.本文首先总结UAV-MEC网络的技术架构以及应用场景, 然后从多址接入方案、计算卸载策略这两方面介绍和分析网络中的关键技术, 最后将会探讨未来的挑战以及发展方向. ...
A survey of edge intelligent computing based on UAV
1
2020
... 目前, 已经有一些关于UAV和边缘计算的相关研究综述文章.在UAV的综述中, 文献[6 ]对UAV网络中多种接入技术进行全面的总结与对比.文献[7 ]回顾非正交多址接入(non-orthogonal multiple access, NOMA)在UAV网络中的应用.在边缘计算的综述中, 文献[8 ]提出MEC技术的实现依赖于网络功能虚拟化(network function virtualization, NFV)和软件定义网络(software defined network, SDN), 并将虚拟化的资源通过虚拟功能网元(virtual network function, VNF)执行.文献[9 ]针对MEC中的计算卸载方案进行分析总结.在UAV-MEC网络的综述中, 文献[10 ]简要介绍UAV-MEC网络的体系架构、任务卸载的工作原理、计算卸载时采用的不同接入方案.文献[11 ]提出一种融合UAV和边缘计算的网络架构, 并简单分析总结多用户接入技术与计算卸载策略.文献[12 ]探索一种基于SDN的UAV-MEC框架.文献[13 ]对UAV-MEC网络的资源优化问题进行综述, 提出基于软件定义UAV网络的总体架构.文献[14 ]中简要概述UAV搭载MEC设备的基本网络架构, 重点对现有的卸载算法进行了调查和分析对比.文献[15 ]总结多UAV-MEC网络中多址接入与计算卸载决策.文献[16 ]总结利用智能方法解决UAV-MEC网络中以最小化能耗、最小化时延、最大化任务处理数为目标的资源优化问题.限于篇幅和侧重点, 上述综述文章只是简单地介绍UAV-MEC网络中的技术架构和多用户接入方案.本文的创新之处在于针对UAV-MEC网络的技术架构进行详细的介绍, 从多用户接入的角度出发, 详细对比多种接入方案, 并分析其对计算卸载时延与能耗性能的影响, 给出多种最新的计算卸载策略.通过详细描述UAV-MEC网络的技术架构, 更好地了解该网络的组成部分.通过对比不同的接入方案, 综述给出对计算卸载性能的影响, 为读者提供了深入分析、选择接入方案和计算卸载策略的依据.本文首先总结UAV-MEC网络的技术架构以及应用场景, 然后从多址接入方案、计算卸载策略这两方面介绍和分析网络中的关键技术, 最后将会探讨未来的挑战以及发展方向. ...
1
... 利用NFV技术, 配备MEC服务器的UAV可以通过创建多个虚拟机或轻量级的容器, 实现有效的计算资源虚拟化分割, 为多个终端设备的不同类型任务提供计算服务.文献[17 ]提出了通过NFV技术, 优化UAV的部署和飞行控制, 确保UAV提供服务的可靠性和用户服务质量(quality of service, QoS)需求.借鉴文献[11 -12 ]的思想, 本文提出UAV-MEC网络可以虚拟化为物理层、虚拟化资源层、VNF控制层和编排器层.物理层是机载的MEC服务器网络、计算、存储平台.虚拟化资源层将硬件平台资源抽象为虚拟化的资源.VNF控制层是通过VNF进行虚拟化计算、存储资源的管理与调度.编排器层是对虚拟化的容器进行编排, 使之能够顺利地接收终端设备的计算任务, 并及时调整计算资源的分配. ...
UAV-based IoT platform: a crowd surveillance use case
1
2017
... (4) 智能人群监控.UAV-MEC网络可以用于基于人脸识别的人群监控, 在大量人群中识别出指定的可疑分子.在城市繁华的中心区域, 通过对大量监控摄像头或UAV的图像处理, 识别罪犯和发现任何其他可疑的人类活动, 保护人群安全.文献[18 ]开发基于UAV-MEC网络人群监控的实物平台, 实验表明该平台可以降低能耗并显著提高系统响应能力. ...
Max-min energy-efficient optimization for cognitive heterogeneous networks with spectrum sensing errors and channel uncertainties
1
2021
... 在传统的UAV和边缘计算网络[6 ] 中通常采用OMA方式, 包括时分多址(time division multiple access, TDMA), 频分多址(frequency division multiple access, FDMA), 正交FDMA(orthogonal FDMA, OFDMA), 码分多址(code division multiple access, CDMA) 和空分多址(space division multiple access, SDMA).在TDMA中, 不同的时隙被分配给与UAV通信的不同用户.在FDMA和OFDMA中, 不同的频带或正交的子载波被分配给用户[19 ] , 而在CDMA中, 不同的设备有不同的正交码.在SDMA中, 使用波束成形对用户组进行空间分离, 为每个组提供全时间或频率资源.图 4 为UAV-MEC网络中全向天线与SDMA的示意图, 其中UAV采用全向天线与多设备进行通信时, 会在其他资源域进行多用户的区分, 具体如图 5 所示. ...
Joint resources and workflow scheduling in UAV-enabled wirelessly-powered MEC for IoT systems
2
2019
... 文献[20 ]研究一种基于UAV的MEC系统, 为了提高UAV的能效, 提出一种基于TDMA接入方案的工作排队模型, 该模型允许UAV-MEC系统中不同用户设备的并行传输和执行任务; 利用块坐标下降(block coordinate descent, BCD)法、拉格朗日对偶算法和流水作业排序算法, 联合优化UAV飞行节点关联、计算资源分配、UAV悬停时间、无线供电时间和UAV飞行节点服务顺序, 实现UAV总能耗的最小化.文献[21 ]从物理层安全的角度研究基于TDMA方案的UAV-MEC系统, 为了解决多变量高度耦合的非凸问题, 采用BCD算法对UAV的轨迹和计算资源进行联合优化, 优化TDMA方案最小安全计算能力最大化的问题. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
Joint resource and trajectory optimization for security in uav-assisted MEC systems
2
2021
... 文献[20 ]研究一种基于UAV的MEC系统, 为了提高UAV的能效, 提出一种基于TDMA接入方案的工作排队模型, 该模型允许UAV-MEC系统中不同用户设备的并行传输和执行任务; 利用块坐标下降(block coordinate descent, BCD)法、拉格朗日对偶算法和流水作业排序算法, 联合优化UAV飞行节点关联、计算资源分配、UAV悬停时间、无线供电时间和UAV飞行节点服务顺序, 实现UAV总能耗的最小化.文献[21 ]从物理层安全的角度研究基于TDMA方案的UAV-MEC系统, 为了解决多变量高度耦合的非凸问题, 采用BCD算法对UAV的轨迹和计算资源进行联合优化, 优化TDMA方案最小安全计算能力最大化的问题. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
Joint computation offloading and trajectory planning for UAV-assisted edge computing
2
2021
... 在UAV-MEC系统中在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入方案[22 ] .文献[23 ]研究UAV与基站协同为物联网设备提供MEC服务, 在任务卸载过程中, 使用FDMA方案以带宽区分多用户设备; 通过联合优化UAV的位置、通信和计算资源分配, 以及任务卸载决策, 利用连续凸近似(sucessive convex approximation, SCA)算法求解一个以所有物联网设备业务时延和UAV能耗加权之和最小为目标的优化问题.文献[24 ]考虑具备时间敏感性任务的设备需求, 研究基于FDMA的UAV-MEC网络, 该网络由多UAV为用户设备提供协同卸载服务; 利用BCD和交替迭代算法, 对UAV的飞行轨迹、资源分配和卸载决策进行联合优化, 使系统总能耗最小. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
Joint task offloading and resource allocation in UAV-enabled mobile edge computing
2
2020
... 在UAV-MEC系统中在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入方案[22 ] .文献[23 ]研究UAV与基站协同为物联网设备提供MEC服务, 在任务卸载过程中, 使用FDMA方案以带宽区分多用户设备; 通过联合优化UAV的位置、通信和计算资源分配, 以及任务卸载决策, 利用连续凸近似(sucessive convex approximation, SCA)算法求解一个以所有物联网设备业务时延和UAV能耗加权之和最小为目标的优化问题.文献[24 ]考虑具备时间敏感性任务的设备需求, 研究基于FDMA的UAV-MEC网络, 该网络由多UAV为用户设备提供协同卸载服务; 利用BCD和交替迭代算法, 对UAV的飞行轨迹、资源分配和卸载决策进行联合优化, 使系统总能耗最小. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
Collaborative offloading for UAV-enabled time-sensitive MEC networks
2
2021
... 在UAV-MEC系统中在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入方案[22 ] .文献[23 ]研究UAV与基站协同为物联网设备提供MEC服务, 在任务卸载过程中, 使用FDMA方案以带宽区分多用户设备; 通过联合优化UAV的位置、通信和计算资源分配, 以及任务卸载决策, 利用连续凸近似(sucessive convex approximation, SCA)算法求解一个以所有物联网设备业务时延和UAV能耗加权之和最小为目标的优化问题.文献[24 ]考虑具备时间敏感性任务的设备需求, 研究基于FDMA的UAV-MEC网络, 该网络由多UAV为用户设备提供协同卸载服务; 利用BCD和交替迭代算法, 对UAV的飞行轨迹、资源分配和卸载决策进行联合优化, 使系统总能耗最小. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
Delay aware scheduling in UAV-enabled OFDMA mobile edge computing system
2
2020
... 文献[25 ]研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题, 通过对时分双工(time division duplex, TDD)和频分双工(frequency division duplex, FDD)两种模式的研究, 提出基于对偶理论的备选搜索优化和SCA的算法, 解决基于下行传输功率和子载波分配的资源分配问题, 该算法可以快速收敛并具有较小的计算复杂度.文献[26 ]讨论OFDMA框架下MEC网络中计算效率加权和最大化问题, 并推导最优子信道和功率分配方案的闭式表达式.文献[27 ]研究地面MEC服务器和UAV-MEC网络协同工作, 地面用户在保证最小计算量的情况下, 将剩余的任务分配给地面服务器和基于OFDMA方案的UAV服务器, 通过优化用户设备占用OFDMA方案的正交频带以及发射功率使得设备与UAV之间传输速率的最大化. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
Computation efficiency maximization in OFDMA-based mobile edge computing networks
2
2020
... 文献[25 ]研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题, 通过对时分双工(time division duplex, TDD)和频分双工(frequency division duplex, FDD)两种模式的研究, 提出基于对偶理论的备选搜索优化和SCA的算法, 解决基于下行传输功率和子载波分配的资源分配问题, 该算法可以快速收敛并具有较小的计算复杂度.文献[26 ]讨论OFDMA框架下MEC网络中计算效率加权和最大化问题, 并推导最优子信道和功率分配方案的闭式表达式.文献[27 ]研究地面MEC服务器和UAV-MEC网络协同工作, 地面用户在保证最小计算量的情况下, 将剩余的任务分配给地面服务器和基于OFDMA方案的UAV服务器, 通过优化用户设备占用OFDMA方案的正交频带以及发射功率使得设备与UAV之间传输速率的最大化. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
UAV-assisted MEC networks with aerial and ground cooperation
2
2021
... 文献[25 ]研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题, 通过对时分双工(time division duplex, TDD)和频分双工(frequency division duplex, FDD)两种模式的研究, 提出基于对偶理论的备选搜索优化和SCA的算法, 解决基于下行传输功率和子载波分配的资源分配问题, 该算法可以快速收敛并具有较小的计算复杂度.文献[26 ]讨论OFDMA框架下MEC网络中计算效率加权和最大化问题, 并推导最优子信道和功率分配方案的闭式表达式.文献[27 ]研究地面MEC服务器和UAV-MEC网络协同工作, 地面用户在保证最小计算量的情况下, 将剩余的任务分配给地面服务器和基于OFDMA方案的UAV服务器, 通过优化用户设备占用OFDMA方案的正交频带以及发射功率使得设备与UAV之间传输速率的最大化. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
Implementation and analysis of multicode multicarrier code division multiple access (MC-MC CDMA) in IEEE 802. 11ah for UAV swarm communication
2
2020
... 针对UAV群实时空中监视网络对距离和吞吐量的需求, 文献[28 ]将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问, 从而为传输视频和其他有效载荷信息提供不同数据速率的多用户通信能力.文献[29 ]研究基于CDMA接入方案的UAV-MEC系统, 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源; 在卸载决策和资源竞争的约束下, 提出一个基于博弈论的方案最小化时间延迟和能量消耗的加权和并证明了纳什均衡的存在性. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
Energy-latency tradeoff for computation offloading in UAV-assisted multiaccess edge computing system
4
2021
... 针对UAV群实时空中监视网络对距离和吞吐量的需求, 文献[28 ]将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问, 从而为传输视频和其他有效载荷信息提供不同数据速率的多用户通信能力.文献[29 ]研究基于CDMA接入方案的UAV-MEC系统, 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源; 在卸载决策和资源竞争的约束下, 提出一个基于博弈论的方案最小化时间延迟和能量消耗的加权和并证明了纳什均衡的存在性. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
... 文献[62 ]研究UAV-MEC具体场景, 其中每个终端可以使用3种计算策略, 即本地计算、卸载部分任务到UAV进行计算、通过UAV中继将任务卸载到基站, 文中通过优化计算卸载比特分配、时隙调度、和功率分配以及UAV轨迹权衡时延和能耗加权和, 并利用拉格朗日对偶法和SCA算法获得近似最优解.文献[63 ]研究计算卸载和资源分配的联合设计, 通过交替优化算法求解了权衡UAV能量和任务完成时间的帕累托最优解, 仿真结果证实所提解决方案能够达到UAV在MEC系统中完成时间和能量消耗之间的权衡.文献[29 ]研究UAV-MEC系统中最小化时间延迟和能量消耗的加权和的问题; 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性; 仿真结果表明, 该博弈论方案能够达到接近最优的性能.文献[64 ]考虑UAV作为用户设备的场景, 机载资源有限的处理能力和能量存储, 使复杂信号的实时分析受到限制; 此时, UAV可以对接边缘计算资源, 卸载计算任务, 降低对传感器输入的响应时间, 降低能耗; 而动态的信道条件和边缘服务器拥塞情况可能会影响任务卸载的性能; 提出一个基于网络、计算负荷参数和当前状态的最优卸载决策框架, 将时延和能耗的优化问题表述为半马尔可夫过程的最优停止时间问题, 并使用动态规划和DRL方法求解该问题.文献[65 ]提出一种基于深度Q网络(deep Q network, DQN)调整计算卸载比例的策略, 降低UAV-MEC网络中任务延迟和能量消耗的线性加权和.文献[66 ]考虑一个配备MEC服务器的多UAV集群网络, 每个UAV集群簇头作为一个智能体, 以分布式方法分配计算资源给终端设备; 提出一种基于无模型DRL的协同计算卸载与资源分配方案, 其中每个智能体基于深度确定性策略梯度(deep deterministic policy gradient, DDPG)网络训练并学习高效的计算卸载策略, 通过公平性指数检查各UAV的状态, 文中目标是通过自适应学习, 最大限度地减少任务的执行延迟和能量消耗, 并获得有效的计算卸载策略.文献[67 ]研究多UAV的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略使任务执行延迟和能量消耗之和最小化.文献[68 ]提出一种多智能体DDPG(multi-agent DDPG, MADDPG)框架, 共同优化多UAV的飞行路线和物联网设备的协同卸载决策, 降低任务处理延迟和设备能量消耗.表 2 总结对比了上述文献中不同计算卸载策略的求解方法. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
Response delay optimization in mobile edge computing enabled UAV swarm
2
2020
... 文献[30 ]中建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台, 该模型包括具有MEC能力的集中式顶部UAV(top UAV, T-UAV)和分布式底部UAV群(bottom UAV, B-UAV).对于负载和飞行能力更强的固定翼T-UAV, 可以部署多个相控阵天线并发产生不同波束, 以支持SDMA通信.在每个相控子阵天线面板上集成多个射频集成电路, 确保接收T-UAV的主瓣束指向每个发射机B-UAV的方向.针对毫米波束状波束的特点, 利用基于全球定位系统等位置感知技术和UAV摄像机图像处理技术的空间正交技术, 实现多架B-UAV以独立波束访问T-UAV的目标.利用随机几何方法, 推导基于UAV群三维分布的单个链路和一组链路的成功传输概率, 并利用排队理论, 得到最优响应延迟. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
Robust energy-efficient maximization for cognitive NOMA networks under channel uncertainties
1
2020
... 传统的OMA方式保证了多设备并发通信之间的正交性, 以避免用户之间的干扰[31 ] .然而, 这种正交设计会受到服务用户数量的限制, 降低了系统的频谱效率, 不能满足设备大量接入与高频谱利用率.用户设备有时需要等待一个可用的正交资源块来被授予访问权, 这对于计算任务时延要求严格的用户是不可接受的.而NOMA可以通过划分发射功率或码本, 使用相同的时隙和频率资源容纳更多的用户与搭载MEC服务器的UAV通信[32 ] . ...
Energy efficiency maximization in NOMA enabled backscatter communications with QoS guarantee
1
2020
... 传统的OMA方式保证了多设备并发通信之间的正交性, 以避免用户之间的干扰[31 ] .然而, 这种正交设计会受到服务用户数量的限制, 降低了系统的频谱效率, 不能满足设备大量接入与高频谱利用率.用户设备有时需要等待一个可用的正交资源块来被授予访问权, 这对于计算任务时延要求严格的用户是不可接受的.而NOMA可以通过划分发射功率或码本, 使用相同的时隙和频率资源容纳更多的用户与搭载MEC服务器的UAV通信[32 ] . ...
Joint trajectory design, task data, and computing resource allocations for NOMA-based and UAV-assisted mobile edge computing
1
2019
... 在基于NOMA的UAV-MEC系统中, 用户设备通过NOMA协议将任务数据上传到UAV MEC服务器, UAV完成任务计算后将结果返回到终端设备.NOMA协议引入了设备之间的干扰, 当上传任务数据量大时, 随机分配任务数据可能会导致设备之间产生较强的干扰, 从而增加设备之间的能量消耗, 导致任务计算时间增加.在任务时间容忍度和多设备的发射功率固定的情况下, 计算资源的分配也会直接影响计算延迟并对设备的能耗产生影响.UAV的动态轨迹决定了用户设备与UAV之间的信道增益, 这对任务数据的传输时间以及UAV的能量消耗有很大的影响.因此, 需要联合优化NOMA的功率或码本分配、UAV轨迹、任务数据分配和计算资源分配, 最小化UAV的能耗同时降低任务计算时间、最大化计算任务的处理数[33 ] . ...
Energy optimization for cellular-connected multi-UAV mobile edge computing systems with multi-access schemes
2
2018
... 为了探讨设备接入策略对系统能耗的影响, 文献[34 ]研究UAV-MEC网络上行传输中TDMA、OFDMA和NOMA接入方案; 在UAV动作、发射功率和比特因果关系的约束条件下, 联合优化比特分配、UAV轨迹、UAV功率分配和资源分配, 从能量消耗的角度研究了UAV-MEC系统; 针对TDMA和OFDMA方案, 利用SCA技术得到一个次优方案; 针对NOMA方案, 将原始问题分解为两个子问题, 并通过对两个子问题的交替优化发展出一种高效的迭代算法; 相比之下, NOMA方案比TDMA、OFDMA节省了更多的UAV能耗, 但是NOMA接收端采用的SIC技术可能会导致额外的实现复杂度.文献[35 ]研究TDMA和NOMA两种接入方案下, UAV-MEC系统能量最小化的问题; 当终端任务的时延限制为2.7 s时, 相比TDMA, NOMA方案的能量消耗降低了18.75%.当终端任务的时延要求很严格时, TDMA的性能会优于NOMA性能, 原因是由于NOMA接收复杂度更高, 更短的任务截止时间会限制NOMA的性能, 导致更大的能耗.文献[36 ]为了支持UAV-MEC网络中众多设备接入, 以及处理上行场景中终端产生的大量数据流量, 采用NOMA接入方案; 与OMA相比, 所提方案的能耗降低了16.66%.文献[37 ]指出利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗比OMA减少了约20%, 并随着用户数量的增加, 优势会进一步扩大.文献[38 ]将RSMA引入UAV-MEC网络, 用户可以将其任务卸载到空中MEC平台计算, 通过优化RSMA的卸载决策、分拆比、解码顺序使响应时延和处理能耗最小化, 结果表明系统能耗优于PD-NOMA方案. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
Mobile edge computing via a UAV-mounted cloudlet: optimization of bit allocation and path planning
2
2018
... 为了探讨设备接入策略对系统能耗的影响, 文献[34 ]研究UAV-MEC网络上行传输中TDMA、OFDMA和NOMA接入方案; 在UAV动作、发射功率和比特因果关系的约束条件下, 联合优化比特分配、UAV轨迹、UAV功率分配和资源分配, 从能量消耗的角度研究了UAV-MEC系统; 针对TDMA和OFDMA方案, 利用SCA技术得到一个次优方案; 针对NOMA方案, 将原始问题分解为两个子问题, 并通过对两个子问题的交替优化发展出一种高效的迭代算法; 相比之下, NOMA方案比TDMA、OFDMA节省了更多的UAV能耗, 但是NOMA接收端采用的SIC技术可能会导致额外的实现复杂度.文献[35 ]研究TDMA和NOMA两种接入方案下, UAV-MEC系统能量最小化的问题; 当终端任务的时延限制为2.7 s时, 相比TDMA, NOMA方案的能量消耗降低了18.75%.当终端任务的时延要求很严格时, TDMA的性能会优于NOMA性能, 原因是由于NOMA接收复杂度更高, 更短的任务截止时间会限制NOMA的性能, 导致更大的能耗.文献[36 ]为了支持UAV-MEC网络中众多设备接入, 以及处理上行场景中终端产生的大量数据流量, 采用NOMA接入方案; 与OMA相比, 所提方案的能耗降低了16.66%.文献[37 ]指出利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗比OMA减少了约20%, 并随着用户数量的增加, 优势会进一步扩大.文献[38 ]将RSMA引入UAV-MEC网络, 用户可以将其任务卸载到空中MEC平台计算, 通过优化RSMA的卸载决策、分拆比、解码顺序使响应时延和处理能耗最小化, 结果表明系统能耗优于PD-NOMA方案. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
Energy consumption minimization scheme for NOMA-based mobile edge computation networks underlaying UAV
2
2021
... 为了探讨设备接入策略对系统能耗的影响, 文献[34 ]研究UAV-MEC网络上行传输中TDMA、OFDMA和NOMA接入方案; 在UAV动作、发射功率和比特因果关系的约束条件下, 联合优化比特分配、UAV轨迹、UAV功率分配和资源分配, 从能量消耗的角度研究了UAV-MEC系统; 针对TDMA和OFDMA方案, 利用SCA技术得到一个次优方案; 针对NOMA方案, 将原始问题分解为两个子问题, 并通过对两个子问题的交替优化发展出一种高效的迭代算法; 相比之下, NOMA方案比TDMA、OFDMA节省了更多的UAV能耗, 但是NOMA接收端采用的SIC技术可能会导致额外的实现复杂度.文献[35 ]研究TDMA和NOMA两种接入方案下, UAV-MEC系统能量最小化的问题; 当终端任务的时延限制为2.7 s时, 相比TDMA, NOMA方案的能量消耗降低了18.75%.当终端任务的时延要求很严格时, TDMA的性能会优于NOMA性能, 原因是由于NOMA接收复杂度更高, 更短的任务截止时间会限制NOMA的性能, 导致更大的能耗.文献[36 ]为了支持UAV-MEC网络中众多设备接入, 以及处理上行场景中终端产生的大量数据流量, 采用NOMA接入方案; 与OMA相比, 所提方案的能耗降低了16.66%.文献[37 ]指出利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗比OMA减少了约20%, 并随着用户数量的增加, 优势会进一步扩大.文献[38 ]将RSMA引入UAV-MEC网络, 用户可以将其任务卸载到空中MEC平台计算, 通过优化RSMA的卸载决策、分拆比、解码顺序使响应时延和处理能耗最小化, 结果表明系统能耗优于PD-NOMA方案. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
Energy-efficient multi-UAV-enabled multiaccess edge computing incorporating NOMA
2
2020
... 为了探讨设备接入策略对系统能耗的影响, 文献[34 ]研究UAV-MEC网络上行传输中TDMA、OFDMA和NOMA接入方案; 在UAV动作、发射功率和比特因果关系的约束条件下, 联合优化比特分配、UAV轨迹、UAV功率分配和资源分配, 从能量消耗的角度研究了UAV-MEC系统; 针对TDMA和OFDMA方案, 利用SCA技术得到一个次优方案; 针对NOMA方案, 将原始问题分解为两个子问题, 并通过对两个子问题的交替优化发展出一种高效的迭代算法; 相比之下, NOMA方案比TDMA、OFDMA节省了更多的UAV能耗, 但是NOMA接收端采用的SIC技术可能会导致额外的实现复杂度.文献[35 ]研究TDMA和NOMA两种接入方案下, UAV-MEC系统能量最小化的问题; 当终端任务的时延限制为2.7 s时, 相比TDMA, NOMA方案的能量消耗降低了18.75%.当终端任务的时延要求很严格时, TDMA的性能会优于NOMA性能, 原因是由于NOMA接收复杂度更高, 更短的任务截止时间会限制NOMA的性能, 导致更大的能耗.文献[36 ]为了支持UAV-MEC网络中众多设备接入, 以及处理上行场景中终端产生的大量数据流量, 采用NOMA接入方案; 与OMA相比, 所提方案的能耗降低了16.66%.文献[37 ]指出利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗比OMA减少了约20%, 并随着用户数量的增加, 优势会进一步扩大.文献[38 ]将RSMA引入UAV-MEC网络, 用户可以将其任务卸载到空中MEC平台计算, 通过优化RSMA的卸载决策、分拆比、解码顺序使响应时延和处理能耗最小化, 结果表明系统能耗优于PD-NOMA方案. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
HAMEC-RSMA: enhanced aerial computing systems with rate splitting multiple access
2
2022
... 为了探讨设备接入策略对系统能耗的影响, 文献[34 ]研究UAV-MEC网络上行传输中TDMA、OFDMA和NOMA接入方案; 在UAV动作、发射功率和比特因果关系的约束条件下, 联合优化比特分配、UAV轨迹、UAV功率分配和资源分配, 从能量消耗的角度研究了UAV-MEC系统; 针对TDMA和OFDMA方案, 利用SCA技术得到一个次优方案; 针对NOMA方案, 将原始问题分解为两个子问题, 并通过对两个子问题的交替优化发展出一种高效的迭代算法; 相比之下, NOMA方案比TDMA、OFDMA节省了更多的UAV能耗, 但是NOMA接收端采用的SIC技术可能会导致额外的实现复杂度.文献[35 ]研究TDMA和NOMA两种接入方案下, UAV-MEC系统能量最小化的问题; 当终端任务的时延限制为2.7 s时, 相比TDMA, NOMA方案的能量消耗降低了18.75%.当终端任务的时延要求很严格时, TDMA的性能会优于NOMA性能, 原因是由于NOMA接收复杂度更高, 更短的任务截止时间会限制NOMA的性能, 导致更大的能耗.文献[36 ]为了支持UAV-MEC网络中众多设备接入, 以及处理上行场景中终端产生的大量数据流量, 采用NOMA接入方案; 与OMA相比, 所提方案的能耗降低了16.66%.文献[37 ]指出利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗比OMA减少了约20%, 并随着用户数量的增加, 优势会进一步扩大.文献[38 ]将RSMA引入UAV-MEC网络, 用户可以将其任务卸载到空中MEC平台计算, 通过优化RSMA的卸载决策、分拆比、解码顺序使响应时延和处理能耗最小化, 结果表明系统能耗优于PD-NOMA方案. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
2
... 针对用户接入策略对任务计算延迟的作用, 文献[39 ]将NOMA引入UAV-MEC网络中提高频谱效率, 在考虑UAV能耗和设备QoS的前提下, 进行联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟.文献[40 ]建模一对PD-NOMA用户组的上传时间和同信道干扰之间的相互作用, 通过半定松弛和凹凸过程迭代确定NOMA用户配对和卸载决策, 该方案能有效地抑制同信道干扰, 降低用户平均上传时延并增加待上传用户数量.文献[41 -42 ]提出针对SCMA的码本分配优化算法, 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 从而使得整体任务计算时延降低.文献[43 ]研究基于NOMA接入方案的UAV-MEC系统, 在满足UAV覆盖率的前提下, 最大化所有物联网设备的计算率的问题; 该框架采用NOMA方案, 使多个设备能够同时将其任务传输给UAV, 相比TDMA方案, 提高物联网设备的任务计算率.文献[44 ]将RSMA技术引入UAV的下行传输中, 通过优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率, 证明RSMA相对于NOMA的优势.文献[45 ]提出一种RSMA辅助MEC方案, 用户能够利用RSMA将计算任务卸载到MEC服务器, 求出成功计算概率的封闭表达式, 相比现有的OMA与NOMA方案, RSMA能够提高成功计算概率.UAV-MEC网络中多址接入技术总结对比如表 1 所示. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
Delay-aware computation offloading in NOMA MEC under differentiated uploading delay
2
2020
... 针对用户接入策略对任务计算延迟的作用, 文献[39 ]将NOMA引入UAV-MEC网络中提高频谱效率, 在考虑UAV能耗和设备QoS的前提下, 进行联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟.文献[40 ]建模一对PD-NOMA用户组的上传时间和同信道干扰之间的相互作用, 通过半定松弛和凹凸过程迭代确定NOMA用户配对和卸载决策, 该方案能有效地抑制同信道干扰, 降低用户平均上传时延并增加待上传用户数量.文献[41 -42 ]提出针对SCMA的码本分配优化算法, 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 从而使得整体任务计算时延降低.文献[43 ]研究基于NOMA接入方案的UAV-MEC系统, 在满足UAV覆盖率的前提下, 最大化所有物联网设备的计算率的问题; 该框架采用NOMA方案, 使多个设备能够同时将其任务传输给UAV, 相比TDMA方案, 提高物联网设备的任务计算率.文献[44 ]将RSMA技术引入UAV的下行传输中, 通过优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率, 证明RSMA相对于NOMA的优势.文献[45 ]提出一种RSMA辅助MEC方案, 用户能够利用RSMA将计算任务卸载到MEC服务器, 求出成功计算概率的封闭表达式, 相比现有的OMA与NOMA方案, RSMA能够提高成功计算概率.UAV-MEC网络中多址接入技术总结对比如表 1 所示. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
SCMA-based multiaccess edge computing in IoT systems: an energy-efficiency and latency tradeoff
2
2022
... 针对用户接入策略对任务计算延迟的作用, 文献[39 ]将NOMA引入UAV-MEC网络中提高频谱效率, 在考虑UAV能耗和设备QoS的前提下, 进行联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟.文献[40 ]建模一对PD-NOMA用户组的上传时间和同信道干扰之间的相互作用, 通过半定松弛和凹凸过程迭代确定NOMA用户配对和卸载决策, 该方案能有效地抑制同信道干扰, 降低用户平均上传时延并增加待上传用户数量.文献[41 -42 ]提出针对SCMA的码本分配优化算法, 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 从而使得整体任务计算时延降低.文献[43 ]研究基于NOMA接入方案的UAV-MEC系统, 在满足UAV覆盖率的前提下, 最大化所有物联网设备的计算率的问题; 该框架采用NOMA方案, 使多个设备能够同时将其任务传输给UAV, 相比TDMA方案, 提高物联网设备的任务计算率.文献[44 ]将RSMA技术引入UAV的下行传输中, 通过优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率, 证明RSMA相对于NOMA的优势.文献[45 ]提出一种RSMA辅助MEC方案, 用户能够利用RSMA将计算任务卸载到MEC服务器, 求出成功计算概率的封闭表达式, 相比现有的OMA与NOMA方案, RSMA能够提高成功计算概率.UAV-MEC网络中多址接入技术总结对比如表 1 所示. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
1
... 针对用户接入策略对任务计算延迟的作用, 文献[39 ]将NOMA引入UAV-MEC网络中提高频谱效率, 在考虑UAV能耗和设备QoS的前提下, 进行联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟.文献[40 ]建模一对PD-NOMA用户组的上传时间和同信道干扰之间的相互作用, 通过半定松弛和凹凸过程迭代确定NOMA用户配对和卸载决策, 该方案能有效地抑制同信道干扰, 降低用户平均上传时延并增加待上传用户数量.文献[41 -42 ]提出针对SCMA的码本分配优化算法, 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 从而使得整体任务计算时延降低.文献[43 ]研究基于NOMA接入方案的UAV-MEC系统, 在满足UAV覆盖率的前提下, 最大化所有物联网设备的计算率的问题; 该框架采用NOMA方案, 使多个设备能够同时将其任务传输给UAV, 相比TDMA方案, 提高物联网设备的任务计算率.文献[44 ]将RSMA技术引入UAV的下行传输中, 通过优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率, 证明RSMA相对于NOMA的优势.文献[45 ]提出一种RSMA辅助MEC方案, 用户能够利用RSMA将计算任务卸载到MEC服务器, 求出成功计算概率的封闭表达式, 相比现有的OMA与NOMA方案, RSMA能够提高成功计算概率.UAV-MEC网络中多址接入技术总结对比如表 1 所示. ...
Hybrid beamforming design and resource allocation for UAV-aided wireless-powered mobile edge computing networks with NOMA
2
2021
... 针对用户接入策略对任务计算延迟的作用, 文献[39 ]将NOMA引入UAV-MEC网络中提高频谱效率, 在考虑UAV能耗和设备QoS的前提下, 进行联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟.文献[40 ]建模一对PD-NOMA用户组的上传时间和同信道干扰之间的相互作用, 通过半定松弛和凹凸过程迭代确定NOMA用户配对和卸载决策, 该方案能有效地抑制同信道干扰, 降低用户平均上传时延并增加待上传用户数量.文献[41 -42 ]提出针对SCMA的码本分配优化算法, 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 从而使得整体任务计算时延降低.文献[43 ]研究基于NOMA接入方案的UAV-MEC系统, 在满足UAV覆盖率的前提下, 最大化所有物联网设备的计算率的问题; 该框架采用NOMA方案, 使多个设备能够同时将其任务传输给UAV, 相比TDMA方案, 提高物联网设备的任务计算率.文献[44 ]将RSMA技术引入UAV的下行传输中, 通过优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率, 证明RSMA相对于NOMA的优势.文献[45 ]提出一种RSMA辅助MEC方案, 用户能够利用RSMA将计算任务卸载到MEC服务器, 求出成功计算概率的封闭表达式, 相比现有的OMA与NOMA方案, RSMA能够提高成功计算概率.UAV-MEC网络中多址接入技术总结对比如表 1 所示. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
On the downlink performance of RSMA-based UAV communications
2
2020
... 针对用户接入策略对任务计算延迟的作用, 文献[39 ]将NOMA引入UAV-MEC网络中提高频谱效率, 在考虑UAV能耗和设备QoS的前提下, 进行联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟.文献[40 ]建模一对PD-NOMA用户组的上传时间和同信道干扰之间的相互作用, 通过半定松弛和凹凸过程迭代确定NOMA用户配对和卸载决策, 该方案能有效地抑制同信道干扰, 降低用户平均上传时延并增加待上传用户数量.文献[41 -42 ]提出针对SCMA的码本分配优化算法, 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 从而使得整体任务计算时延降低.文献[43 ]研究基于NOMA接入方案的UAV-MEC系统, 在满足UAV覆盖率的前提下, 最大化所有物联网设备的计算率的问题; 该框架采用NOMA方案, 使多个设备能够同时将其任务传输给UAV, 相比TDMA方案, 提高物联网设备的任务计算率.文献[44 ]将RSMA技术引入UAV的下行传输中, 通过优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率, 证明RSMA相对于NOMA的优势.文献[45 ]提出一种RSMA辅助MEC方案, 用户能够利用RSMA将计算任务卸载到MEC服务器, 求出成功计算概率的封闭表达式, 相比现有的OMA与NOMA方案, RSMA能够提高成功计算概率.UAV-MEC网络中多址接入技术总结对比如表 1 所示. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
Rate-splitting multiple access aided mobile edge computing with randomly deployed users
2
2023
... 针对用户接入策略对任务计算延迟的作用, 文献[39 ]将NOMA引入UAV-MEC网络中提高频谱效率, 在考虑UAV能耗和设备QoS的前提下, 进行联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟.文献[40 ]建模一对PD-NOMA用户组的上传时间和同信道干扰之间的相互作用, 通过半定松弛和凹凸过程迭代确定NOMA用户配对和卸载决策, 该方案能有效地抑制同信道干扰, 降低用户平均上传时延并增加待上传用户数量.文献[41 -42 ]提出针对SCMA的码本分配优化算法, 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 从而使得整体任务计算时延降低.文献[43 ]研究基于NOMA接入方案的UAV-MEC系统, 在满足UAV覆盖率的前提下, 最大化所有物联网设备的计算率的问题; 该框架采用NOMA方案, 使多个设备能够同时将其任务传输给UAV, 相比TDMA方案, 提高物联网设备的任务计算率.文献[44 ]将RSMA技术引入UAV的下行传输中, 通过优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率, 证明RSMA相对于NOMA的优势.文献[45 ]提出一种RSMA辅助MEC方案, 用户能够利用RSMA将计算任务卸载到MEC服务器, 求出成功计算概率的封闭表达式, 相比现有的OMA与NOMA方案, RSMA能够提高成功计算概率.UAV-MEC网络中多址接入技术总结对比如表 1 所示. ...
... Summary and comparison of multiple access technologies in UAV-MEC network
Table 1 文献 年份 多址接入 研究内容 [20 ] 2019 TDMA 提出基于TDMA接入方案的工作排队模型, 允许UAV-MEC系统中不同用户并行传输和执行任务 [21 ] 2021 TDMA 从物理层安全的角度研究基于TDMA方案的UAV-MEC系统 [22 ] 2021 FDMA 说明在以强视距路径为主、频率选择性小的空对地信道时更适合FDMA接入 [23 ] 2020 FDMA 研究UAV与基站协同提供MEC服务, 使用FDMA方案以带宽区分多用户设备传输的任务 [24 ] 2021 FDMA 考虑具备时间敏感性任务的设备需求, 研究基于FDMA的多UAV-MEC网络 [25 ] 2020 OFDMA 研究OFDMA接入方案下UAV-MEC系统中的延迟感知调度问题 [26 ] 2020 OFDMA 讨论OFDMA框架下MEC网络中计算效率加权和最大化问题 [27 ] 2021 OFDMA 通过优化用户设备占用OFDMA方案的正交频带、发射功率使得设备与UAV的传输速率最大化 [28 ] 2020 CDMA 将CDMA方案引入IEEE 802.11ah标准, 以适应UAV群体通信场景下的多个用户设备多路访问 [29 ] 2021 CDMA 设备通过CDMA接入UAV的MEC服务器, 不同的正交码允许多个用户同时有效地共享频谱资源 [30 ] 2020 SDMA 建立基于SDMA接入的UAV-MEC网络的联合通信计算优化模型以及实物平台 [34 ] 2018 NOMA 证明UAV-MEC网络中NOMA方案节省了更多的UAV能耗, 但会导致额外的复杂度 [35 ] 2018 NOMA 研究UAV-MEC系统能量最小化的问题, NOMA方案的能量消耗降低了18.75% [36 ] 2021 NOMA 为了支持UAV-MEC网络中众多设备接入, 采用NOMA接入方案, 能耗降低了16.66% [37 ] 2020 NOMA 利用NOMA方案, 在8个用户的UAV-MEC网络中, 加权能耗减少了约20% [38 ] 2022 RSMA 将RSMA引入UAV-MEC网络, 优化RSMA的卸载决策、分拆比, 系统能耗优于PD-NOMA方案 [39 ] 2019 NOMA 将NOMA引入UAV-MEC网络, 联合轨迹和计算卸载优化, 最小化所有用户任务的总延迟 [40 ] 2020 NOMA 建模一对PD-NOMA用户组的上传时间和同信道干扰的关系, 确定NOMA用户配对和卸载决策 [41 ] 2022 SCMA 验证在MEC网络中SCMA方案比OFDMA接入可以减少数据的上传时间, 降低任务计算时延 [43 ] 2021 NOMA 研究基于NOMA接入方案的UAV-MEC系统, 最大化所有物联网设备的计算率问题 [44 ] 2020 RSMA 优化RSMA的预编码、分拆速率, 最大化用户加权和数据速率 [45 ] 2023 RSMA 求出成功计算概率的封闭表达式, 相比OMA与NOMA方案, RSMA能够提高成功计算概率
2.2 计算卸载策略 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
Joint computation offloading and radio resource allocation in MEC-based wireless-powered backscatter communication networks
1
2021
... 在UAV-MEC网络中, 计算卸载是指通过无线接入方案, 将计算任务所需数据从用户设备上传到配备MEC服务器的UAV或基站并执行的过程[46 ] .计算卸载的目的主要是为了加快计算任务的执行时间, 降低系统能耗, 从而更好地提高用户体验.根据设备的计算任务模型, 计算卸载可以分为整体卸载和部分卸载.整体卸载适用于高度集成或者不可分割的任务(如复杂数学运算).这种类型的任务必须整体在本地执行或者卸载到MEC服务器.部分卸载是将用户的复杂任务分成若干功能模块, 每个子任务分别执行计算卸载决策. ...
Joint offloading and trajectory design for UAV-enabled mobile edge computing systems
2
2019
... 文献[47 ]采用部分卸载的方式, 计算任务分为两部分, 一部分由UAV完成, 其他部分由本地计算; 通过共同优化UAV轨迹、部分卸载任务的比率和用户调度变量, 最小化用户设备任务的最大时延之和; 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法; 仿真分析表明, 该算法的复杂度较低, 且降低了设备任务的时延.文献[48 ]探讨基于毫米波回程的低延迟UAV-MEC网络, 采用联合交替方向乘子法(alternating direction method of multipliers, ADMM)、Dinkelbach算法和SCA算法求解最小化任务时延的问题, 得到最优的卸载策略; 所提算法能够较好地完成设备的时间敏感型任务.文献[49 ]研究UAV辅助的超高可靠低延迟计算卸载的问题, 利用SCA算法解决UAV优化布局的规划问题以及在UAV能量受限的情况下进行资源分配和计算卸载决策的问题.文献[50 ]考虑UAV-MEC网络中多UAV协同提供计算服务, 以最小化所有设备之间的最大任务完成延迟为目标, 提出一种基于BCD和SCA技术的迭代算法来获得近似最优解.文献[51 ]研究多UAV边缘云协同卸载的延迟最小化问题, 采用凸近似方法使原始问题易于处理, 利用李雅普诺夫优化方法进行在线任务卸载决策.为了实现UAV之间的合作, 文献[52 ]提出一种稳定匹配算法, 将计算任务卸载问题转化为双边匹配问题, 利用迭代算法, 使每架UAV与最适合卸载的设备相匹配, 有效降低了平均时延.文献[53 ]提出一种基于Stackelberg博弈方法求解多层UAV-MEC网络中计算卸载决策问题, 配备MEC服务器的UAV通过考虑其他UAV的行为来优化其定价, 以最大化收入; 每个用户设备选择最佳的计算任务卸载策略, 最大限度地减少延迟; 仿真结果表明, 该方案能有效地降低UAV的卸载时延.文献[54 ]在UAV-MEC系统中, 将复杂的计算任务分解为具有相互依赖性的典型任务流; 通过考虑UAV任务、动态网络状态和能量约束的相互依赖性, 建立平均任务响应时间最小化问题, 并将其建模为马尔可夫决策过程; 每次任务到达或任务执行完成时, 方案应该决定下一个任务执行的无人机MEC服务器, 实现协同任务卸载, 提出了多智能体强化学习(multi-agent reinforcement learning, MARL)算法的计算卸载策略; 基于MARL的计算卸载策略具有较好的收敛性, 能够显著降低平均任务响应时间并能适应动态环境. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
2
... 文献[47 ]采用部分卸载的方式, 计算任务分为两部分, 一部分由UAV完成, 其他部分由本地计算; 通过共同优化UAV轨迹、部分卸载任务的比率和用户调度变量, 最小化用户设备任务的最大时延之和; 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法; 仿真分析表明, 该算法的复杂度较低, 且降低了设备任务的时延.文献[48 ]探讨基于毫米波回程的低延迟UAV-MEC网络, 采用联合交替方向乘子法(alternating direction method of multipliers, ADMM)、Dinkelbach算法和SCA算法求解最小化任务时延的问题, 得到最优的卸载策略; 所提算法能够较好地完成设备的时间敏感型任务.文献[49 ]研究UAV辅助的超高可靠低延迟计算卸载的问题, 利用SCA算法解决UAV优化布局的规划问题以及在UAV能量受限的情况下进行资源分配和计算卸载决策的问题.文献[50 ]考虑UAV-MEC网络中多UAV协同提供计算服务, 以最小化所有设备之间的最大任务完成延迟为目标, 提出一种基于BCD和SCA技术的迭代算法来获得近似最优解.文献[51 ]研究多UAV边缘云协同卸载的延迟最小化问题, 采用凸近似方法使原始问题易于处理, 利用李雅普诺夫优化方法进行在线任务卸载决策.为了实现UAV之间的合作, 文献[52 ]提出一种稳定匹配算法, 将计算任务卸载问题转化为双边匹配问题, 利用迭代算法, 使每架UAV与最适合卸载的设备相匹配, 有效降低了平均时延.文献[53 ]提出一种基于Stackelberg博弈方法求解多层UAV-MEC网络中计算卸载决策问题, 配备MEC服务器的UAV通过考虑其他UAV的行为来优化其定价, 以最大化收入; 每个用户设备选择最佳的计算任务卸载策略, 最大限度地减少延迟; 仿真结果表明, 该方案能有效地降低UAV的卸载时延.文献[54 ]在UAV-MEC系统中, 将复杂的计算任务分解为具有相互依赖性的典型任务流; 通过考虑UAV任务、动态网络状态和能量约束的相互依赖性, 建立平均任务响应时间最小化问题, 并将其建模为马尔可夫决策过程; 每次任务到达或任务执行完成时, 方案应该决定下一个任务执行的无人机MEC服务器, 实现协同任务卸载, 提出了多智能体强化学习(multi-agent reinforcement learning, MARL)算法的计算卸载策略; 基于MARL的计算卸载策略具有较好的收敛性, 能够显著降低平均任务响应时间并能适应动态环境. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
UAV-aided ultra-reliable low-latency computation offloading in future IoT networks
2
2021
... 文献[47 ]采用部分卸载的方式, 计算任务分为两部分, 一部分由UAV完成, 其他部分由本地计算; 通过共同优化UAV轨迹、部分卸载任务的比率和用户调度变量, 最小化用户设备任务的最大时延之和; 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法; 仿真分析表明, 该算法的复杂度较低, 且降低了设备任务的时延.文献[48 ]探讨基于毫米波回程的低延迟UAV-MEC网络, 采用联合交替方向乘子法(alternating direction method of multipliers, ADMM)、Dinkelbach算法和SCA算法求解最小化任务时延的问题, 得到最优的卸载策略; 所提算法能够较好地完成设备的时间敏感型任务.文献[49 ]研究UAV辅助的超高可靠低延迟计算卸载的问题, 利用SCA算法解决UAV优化布局的规划问题以及在UAV能量受限的情况下进行资源分配和计算卸载决策的问题.文献[50 ]考虑UAV-MEC网络中多UAV协同提供计算服务, 以最小化所有设备之间的最大任务完成延迟为目标, 提出一种基于BCD和SCA技术的迭代算法来获得近似最优解.文献[51 ]研究多UAV边缘云协同卸载的延迟最小化问题, 采用凸近似方法使原始问题易于处理, 利用李雅普诺夫优化方法进行在线任务卸载决策.为了实现UAV之间的合作, 文献[52 ]提出一种稳定匹配算法, 将计算任务卸载问题转化为双边匹配问题, 利用迭代算法, 使每架UAV与最适合卸载的设备相匹配, 有效降低了平均时延.文献[53 ]提出一种基于Stackelberg博弈方法求解多层UAV-MEC网络中计算卸载决策问题, 配备MEC服务器的UAV通过考虑其他UAV的行为来优化其定价, 以最大化收入; 每个用户设备选择最佳的计算任务卸载策略, 最大限度地减少延迟; 仿真结果表明, 该方案能有效地降低UAV的卸载时延.文献[54 ]在UAV-MEC系统中, 将复杂的计算任务分解为具有相互依赖性的典型任务流; 通过考虑UAV任务、动态网络状态和能量约束的相互依赖性, 建立平均任务响应时间最小化问题, 并将其建模为马尔可夫决策过程; 每次任务到达或任务执行完成时, 方案应该决定下一个任务执行的无人机MEC服务器, 实现协同任务卸载, 提出了多智能体强化学习(multi-agent reinforcement learning, MARL)算法的计算卸载策略; 基于MARL的计算卸载策略具有较好的收敛性, 能够显著降低平均任务响应时间并能适应动态环境. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
Service caching based aerial cooperative computing and resource allocation in multi-UAV enabled mec systems
2
2022
... 文献[47 ]采用部分卸载的方式, 计算任务分为两部分, 一部分由UAV完成, 其他部分由本地计算; 通过共同优化UAV轨迹、部分卸载任务的比率和用户调度变量, 最小化用户设备任务的最大时延之和; 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法; 仿真分析表明, 该算法的复杂度较低, 且降低了设备任务的时延.文献[48 ]探讨基于毫米波回程的低延迟UAV-MEC网络, 采用联合交替方向乘子法(alternating direction method of multipliers, ADMM)、Dinkelbach算法和SCA算法求解最小化任务时延的问题, 得到最优的卸载策略; 所提算法能够较好地完成设备的时间敏感型任务.文献[49 ]研究UAV辅助的超高可靠低延迟计算卸载的问题, 利用SCA算法解决UAV优化布局的规划问题以及在UAV能量受限的情况下进行资源分配和计算卸载决策的问题.文献[50 ]考虑UAV-MEC网络中多UAV协同提供计算服务, 以最小化所有设备之间的最大任务完成延迟为目标, 提出一种基于BCD和SCA技术的迭代算法来获得近似最优解.文献[51 ]研究多UAV边缘云协同卸载的延迟最小化问题, 采用凸近似方法使原始问题易于处理, 利用李雅普诺夫优化方法进行在线任务卸载决策.为了实现UAV之间的合作, 文献[52 ]提出一种稳定匹配算法, 将计算任务卸载问题转化为双边匹配问题, 利用迭代算法, 使每架UAV与最适合卸载的设备相匹配, 有效降低了平均时延.文献[53 ]提出一种基于Stackelberg博弈方法求解多层UAV-MEC网络中计算卸载决策问题, 配备MEC服务器的UAV通过考虑其他UAV的行为来优化其定价, 以最大化收入; 每个用户设备选择最佳的计算任务卸载策略, 最大限度地减少延迟; 仿真结果表明, 该方案能有效地降低UAV的卸载时延.文献[54 ]在UAV-MEC系统中, 将复杂的计算任务分解为具有相互依赖性的典型任务流; 通过考虑UAV任务、动态网络状态和能量约束的相互依赖性, 建立平均任务响应时间最小化问题, 并将其建模为马尔可夫决策过程; 每次任务到达或任务执行完成时, 方案应该决定下一个任务执行的无人机MEC服务器, 实现协同任务卸载, 提出了多智能体强化学习(multi-agent reinforcement learning, MARL)算法的计算卸载策略; 基于MARL的计算卸载策略具有较好的收敛性, 能够显著降低平均任务响应时间并能适应动态环境. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
Delay-aware cooperative task offloading for multi-UAV enabled edge-cloud computing
2
2024
... 文献[47 ]采用部分卸载的方式, 计算任务分为两部分, 一部分由UAV完成, 其他部分由本地计算; 通过共同优化UAV轨迹、部分卸载任务的比率和用户调度变量, 最小化用户设备任务的最大时延之和; 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法; 仿真分析表明, 该算法的复杂度较低, 且降低了设备任务的时延.文献[48 ]探讨基于毫米波回程的低延迟UAV-MEC网络, 采用联合交替方向乘子法(alternating direction method of multipliers, ADMM)、Dinkelbach算法和SCA算法求解最小化任务时延的问题, 得到最优的卸载策略; 所提算法能够较好地完成设备的时间敏感型任务.文献[49 ]研究UAV辅助的超高可靠低延迟计算卸载的问题, 利用SCA算法解决UAV优化布局的规划问题以及在UAV能量受限的情况下进行资源分配和计算卸载决策的问题.文献[50 ]考虑UAV-MEC网络中多UAV协同提供计算服务, 以最小化所有设备之间的最大任务完成延迟为目标, 提出一种基于BCD和SCA技术的迭代算法来获得近似最优解.文献[51 ]研究多UAV边缘云协同卸载的延迟最小化问题, 采用凸近似方法使原始问题易于处理, 利用李雅普诺夫优化方法进行在线任务卸载决策.为了实现UAV之间的合作, 文献[52 ]提出一种稳定匹配算法, 将计算任务卸载问题转化为双边匹配问题, 利用迭代算法, 使每架UAV与最适合卸载的设备相匹配, 有效降低了平均时延.文献[53 ]提出一种基于Stackelberg博弈方法求解多层UAV-MEC网络中计算卸载决策问题, 配备MEC服务器的UAV通过考虑其他UAV的行为来优化其定价, 以最大化收入; 每个用户设备选择最佳的计算任务卸载策略, 最大限度地减少延迟; 仿真结果表明, 该方案能有效地降低UAV的卸载时延.文献[54 ]在UAV-MEC系统中, 将复杂的计算任务分解为具有相互依赖性的典型任务流; 通过考虑UAV任务、动态网络状态和能量约束的相互依赖性, 建立平均任务响应时间最小化问题, 并将其建模为马尔可夫决策过程; 每次任务到达或任务执行完成时, 方案应该决定下一个任务执行的无人机MEC服务器, 实现协同任务卸载, 提出了多智能体强化学习(multi-agent reinforcement learning, MARL)算法的计算卸载策略; 基于MARL的计算卸载策略具有较好的收敛性, 能够显著降低平均任务响应时间并能适应动态环境. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
2
... 文献[47 ]采用部分卸载的方式, 计算任务分为两部分, 一部分由UAV完成, 其他部分由本地计算; 通过共同优化UAV轨迹、部分卸载任务的比率和用户调度变量, 最小化用户设备任务的最大时延之和; 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法; 仿真分析表明, 该算法的复杂度较低, 且降低了设备任务的时延.文献[48 ]探讨基于毫米波回程的低延迟UAV-MEC网络, 采用联合交替方向乘子法(alternating direction method of multipliers, ADMM)、Dinkelbach算法和SCA算法求解最小化任务时延的问题, 得到最优的卸载策略; 所提算法能够较好地完成设备的时间敏感型任务.文献[49 ]研究UAV辅助的超高可靠低延迟计算卸载的问题, 利用SCA算法解决UAV优化布局的规划问题以及在UAV能量受限的情况下进行资源分配和计算卸载决策的问题.文献[50 ]考虑UAV-MEC网络中多UAV协同提供计算服务, 以最小化所有设备之间的最大任务完成延迟为目标, 提出一种基于BCD和SCA技术的迭代算法来获得近似最优解.文献[51 ]研究多UAV边缘云协同卸载的延迟最小化问题, 采用凸近似方法使原始问题易于处理, 利用李雅普诺夫优化方法进行在线任务卸载决策.为了实现UAV之间的合作, 文献[52 ]提出一种稳定匹配算法, 将计算任务卸载问题转化为双边匹配问题, 利用迭代算法, 使每架UAV与最适合卸载的设备相匹配, 有效降低了平均时延.文献[53 ]提出一种基于Stackelberg博弈方法求解多层UAV-MEC网络中计算卸载决策问题, 配备MEC服务器的UAV通过考虑其他UAV的行为来优化其定价, 以最大化收入; 每个用户设备选择最佳的计算任务卸载策略, 最大限度地减少延迟; 仿真结果表明, 该方案能有效地降低UAV的卸载时延.文献[54 ]在UAV-MEC系统中, 将复杂的计算任务分解为具有相互依赖性的典型任务流; 通过考虑UAV任务、动态网络状态和能量约束的相互依赖性, 建立平均任务响应时间最小化问题, 并将其建模为马尔可夫决策过程; 每次任务到达或任务执行完成时, 方案应该决定下一个任务执行的无人机MEC服务器, 实现协同任务卸载, 提出了多智能体强化学习(multi-agent reinforcement learning, MARL)算法的计算卸载策略; 基于MARL的计算卸载策略具有较好的收敛性, 能够显著降低平均任务响应时间并能适应动态环境. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
2
... 文献[47 ]采用部分卸载的方式, 计算任务分为两部分, 一部分由UAV完成, 其他部分由本地计算; 通过共同优化UAV轨迹、部分卸载任务的比率和用户调度变量, 最小化用户设备任务的最大时延之和; 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法; 仿真分析表明, 该算法的复杂度较低, 且降低了设备任务的时延.文献[48 ]探讨基于毫米波回程的低延迟UAV-MEC网络, 采用联合交替方向乘子法(alternating direction method of multipliers, ADMM)、Dinkelbach算法和SCA算法求解最小化任务时延的问题, 得到最优的卸载策略; 所提算法能够较好地完成设备的时间敏感型任务.文献[49 ]研究UAV辅助的超高可靠低延迟计算卸载的问题, 利用SCA算法解决UAV优化布局的规划问题以及在UAV能量受限的情况下进行资源分配和计算卸载决策的问题.文献[50 ]考虑UAV-MEC网络中多UAV协同提供计算服务, 以最小化所有设备之间的最大任务完成延迟为目标, 提出一种基于BCD和SCA技术的迭代算法来获得近似最优解.文献[51 ]研究多UAV边缘云协同卸载的延迟最小化问题, 采用凸近似方法使原始问题易于处理, 利用李雅普诺夫优化方法进行在线任务卸载决策.为了实现UAV之间的合作, 文献[52 ]提出一种稳定匹配算法, 将计算任务卸载问题转化为双边匹配问题, 利用迭代算法, 使每架UAV与最适合卸载的设备相匹配, 有效降低了平均时延.文献[53 ]提出一种基于Stackelberg博弈方法求解多层UAV-MEC网络中计算卸载决策问题, 配备MEC服务器的UAV通过考虑其他UAV的行为来优化其定价, 以最大化收入; 每个用户设备选择最佳的计算任务卸载策略, 最大限度地减少延迟; 仿真结果表明, 该方案能有效地降低UAV的卸载时延.文献[54 ]在UAV-MEC系统中, 将复杂的计算任务分解为具有相互依赖性的典型任务流; 通过考虑UAV任务、动态网络状态和能量约束的相互依赖性, 建立平均任务响应时间最小化问题, 并将其建模为马尔可夫决策过程; 每次任务到达或任务执行完成时, 方案应该决定下一个任务执行的无人机MEC服务器, 实现协同任务卸载, 提出了多智能体强化学习(multi-agent reinforcement learning, MARL)算法的计算卸载策略; 基于MARL的计算卸载策略具有较好的收敛性, 能够显著降低平均任务响应时间并能适应动态环境. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
Learning-based computation offloading approaches in UAVs-assisted edge computing
2
2021
... 文献[47 ]采用部分卸载的方式, 计算任务分为两部分, 一部分由UAV完成, 其他部分由本地计算; 通过共同优化UAV轨迹、部分卸载任务的比率和用户调度变量, 最小化用户设备任务的最大时延之和; 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法; 仿真分析表明, 该算法的复杂度较低, 且降低了设备任务的时延.文献[48 ]探讨基于毫米波回程的低延迟UAV-MEC网络, 采用联合交替方向乘子法(alternating direction method of multipliers, ADMM)、Dinkelbach算法和SCA算法求解最小化任务时延的问题, 得到最优的卸载策略; 所提算法能够较好地完成设备的时间敏感型任务.文献[49 ]研究UAV辅助的超高可靠低延迟计算卸载的问题, 利用SCA算法解决UAV优化布局的规划问题以及在UAV能量受限的情况下进行资源分配和计算卸载决策的问题.文献[50 ]考虑UAV-MEC网络中多UAV协同提供计算服务, 以最小化所有设备之间的最大任务完成延迟为目标, 提出一种基于BCD和SCA技术的迭代算法来获得近似最优解.文献[51 ]研究多UAV边缘云协同卸载的延迟最小化问题, 采用凸近似方法使原始问题易于处理, 利用李雅普诺夫优化方法进行在线任务卸载决策.为了实现UAV之间的合作, 文献[52 ]提出一种稳定匹配算法, 将计算任务卸载问题转化为双边匹配问题, 利用迭代算法, 使每架UAV与最适合卸载的设备相匹配, 有效降低了平均时延.文献[53 ]提出一种基于Stackelberg博弈方法求解多层UAV-MEC网络中计算卸载决策问题, 配备MEC服务器的UAV通过考虑其他UAV的行为来优化其定价, 以最大化收入; 每个用户设备选择最佳的计算任务卸载策略, 最大限度地减少延迟; 仿真结果表明, 该方案能有效地降低UAV的卸载时延.文献[54 ]在UAV-MEC系统中, 将复杂的计算任务分解为具有相互依赖性的典型任务流; 通过考虑UAV任务、动态网络状态和能量约束的相互依赖性, 建立平均任务响应时间最小化问题, 并将其建模为马尔可夫决策过程; 每次任务到达或任务执行完成时, 方案应该决定下一个任务执行的无人机MEC服务器, 实现协同任务卸载, 提出了多智能体强化学习(multi-agent reinforcement learning, MARL)算法的计算卸载策略; 基于MARL的计算卸载策略具有较好的收敛性, 能够显著降低平均任务响应时间并能适应动态环境. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
2
... 文献[55 ]考虑UAV-MEC系统中, 最小化物联网设备的能量消耗以及UAV的能量消耗问题; 在所有物联网设备任务的时延约束和通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略; 仿真结果表明, 该方法显著降低了系统功耗.文献[56 ]研究UAV增强边缘计算网络的能量最小化问题, 将该优化问题表述为混合整数非凸优化问题, 并提出一种基于BCD和SCA技术的迭代优化算法, 降低完成任务的总能耗, 验证任务卸载的必要性.文献[57 ]在UAV计算卸载策略、资源分配和飞行轨迹调度的约束下, 最小化移动用户设备和UAV的平均加权能耗; 利用李雅普诺夫优化法分析计算任务队列, 并利用交替迭代优化法求解出了计算卸载策略.文献[58 ]研究基于多UAV联盟的UAV-MEC网络的计算卸载问题, 针对分层卸载特征, 给出一个离散的多领导者多跟随者的能量最小化Stackelberg博弈, 并证明纳什均衡的存在性; 仿真结果表明, 与现有的一些方法相比, 所提算法能够实现较低的网络能耗.文献[59 ]将人工智能引入UAV-MEC网络, 实现智能任务的卸载和资源的分配; 深度强化学习(deep reinforcement learning, DRL)是UAV-MEC系统中高效决策的无模型解决方案, 如任务卸载决策和计算资源分配; 深度神经网络(deep neural network, DNN)的拟合能力为UAV-MEC系统的计算任务预测提供一种方法; 预测结果可用于进一步提高多UAV协同卸载的性能.文献[60 ]针对UAV-MEC系统, 利用长短期记忆网络(long short term memory, LSTM)进行计算任务预测, 并在此基础上提出能耗最优的3层计算卸载算法; 实验表明, 该算法可以根据任务所需的时延、UAV高度和数据大小, 动态规划UAV-MEC网络的计算卸载策略, 从而有效降低UAV的能耗.文献[61 ]提出一个基于博弈理论和DRL算法框架用于多UAV与地面基站协同网络的计算卸载; 该框架可以通过马尔可夫决策过程求解多UAV与地面基站MEC服务器协同的计算卸载最优策略. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
UAV-enhanced intelligent offloading for internet of things at the edge
2
2020
... 文献[55 ]考虑UAV-MEC系统中, 最小化物联网设备的能量消耗以及UAV的能量消耗问题; 在所有物联网设备任务的时延约束和通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略; 仿真结果表明, 该方法显著降低了系统功耗.文献[56 ]研究UAV增强边缘计算网络的能量最小化问题, 将该优化问题表述为混合整数非凸优化问题, 并提出一种基于BCD和SCA技术的迭代优化算法, 降低完成任务的总能耗, 验证任务卸载的必要性.文献[57 ]在UAV计算卸载策略、资源分配和飞行轨迹调度的约束下, 最小化移动用户设备和UAV的平均加权能耗; 利用李雅普诺夫优化法分析计算任务队列, 并利用交替迭代优化法求解出了计算卸载策略.文献[58 ]研究基于多UAV联盟的UAV-MEC网络的计算卸载问题, 针对分层卸载特征, 给出一个离散的多领导者多跟随者的能量最小化Stackelberg博弈, 并证明纳什均衡的存在性; 仿真结果表明, 与现有的一些方法相比, 所提算法能够实现较低的网络能耗.文献[59 ]将人工智能引入UAV-MEC网络, 实现智能任务的卸载和资源的分配; 深度强化学习(deep reinforcement learning, DRL)是UAV-MEC系统中高效决策的无模型解决方案, 如任务卸载决策和计算资源分配; 深度神经网络(deep neural network, DNN)的拟合能力为UAV-MEC系统的计算任务预测提供一种方法; 预测结果可用于进一步提高多UAV协同卸载的性能.文献[60 ]针对UAV-MEC系统, 利用长短期记忆网络(long short term memory, LSTM)进行计算任务预测, 并在此基础上提出能耗最优的3层计算卸载算法; 实验表明, 该算法可以根据任务所需的时延、UAV高度和数据大小, 动态规划UAV-MEC网络的计算卸载策略, 从而有效降低UAV的能耗.文献[61 ]提出一个基于博弈理论和DRL算法框架用于多UAV与地面基站协同网络的计算卸载; 该框架可以通过马尔可夫决策过程求解多UAV与地面基站MEC服务器协同的计算卸载最优策略. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
Stochastic computation offloading and trajectory scheduling for UAV-assisted mobile edge computing
2
2019
... 文献[55 ]考虑UAV-MEC系统中, 最小化物联网设备的能量消耗以及UAV的能量消耗问题; 在所有物联网设备任务的时延约束和通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略; 仿真结果表明, 该方法显著降低了系统功耗.文献[56 ]研究UAV增强边缘计算网络的能量最小化问题, 将该优化问题表述为混合整数非凸优化问题, 并提出一种基于BCD和SCA技术的迭代优化算法, 降低完成任务的总能耗, 验证任务卸载的必要性.文献[57 ]在UAV计算卸载策略、资源分配和飞行轨迹调度的约束下, 最小化移动用户设备和UAV的平均加权能耗; 利用李雅普诺夫优化法分析计算任务队列, 并利用交替迭代优化法求解出了计算卸载策略.文献[58 ]研究基于多UAV联盟的UAV-MEC网络的计算卸载问题, 针对分层卸载特征, 给出一个离散的多领导者多跟随者的能量最小化Stackelberg博弈, 并证明纳什均衡的存在性; 仿真结果表明, 与现有的一些方法相比, 所提算法能够实现较低的网络能耗.文献[59 ]将人工智能引入UAV-MEC网络, 实现智能任务的卸载和资源的分配; 深度强化学习(deep reinforcement learning, DRL)是UAV-MEC系统中高效决策的无模型解决方案, 如任务卸载决策和计算资源分配; 深度神经网络(deep neural network, DNN)的拟合能力为UAV-MEC系统的计算任务预测提供一种方法; 预测结果可用于进一步提高多UAV协同卸载的性能.文献[60 ]针对UAV-MEC系统, 利用长短期记忆网络(long short term memory, LSTM)进行计算任务预测, 并在此基础上提出能耗最优的3层计算卸载算法; 实验表明, 该算法可以根据任务所需的时延、UAV高度和数据大小, 动态规划UAV-MEC网络的计算卸载策略, 从而有效降低UAV的能耗.文献[61 ]提出一个基于博弈理论和DRL算法框架用于多UAV与地面基站协同网络的计算卸载; 该框架可以通过马尔可夫决策过程求解多UAV与地面基站MEC服务器协同的计算卸载最优策略. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
A multi-leader multi-follower Stackelberg game for coalition-based UAV MEC networks
2
2021
... 文献[55 ]考虑UAV-MEC系统中, 最小化物联网设备的能量消耗以及UAV的能量消耗问题; 在所有物联网设备任务的时延约束和通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略; 仿真结果表明, 该方法显著降低了系统功耗.文献[56 ]研究UAV增强边缘计算网络的能量最小化问题, 将该优化问题表述为混合整数非凸优化问题, 并提出一种基于BCD和SCA技术的迭代优化算法, 降低完成任务的总能耗, 验证任务卸载的必要性.文献[57 ]在UAV计算卸载策略、资源分配和飞行轨迹调度的约束下, 最小化移动用户设备和UAV的平均加权能耗; 利用李雅普诺夫优化法分析计算任务队列, 并利用交替迭代优化法求解出了计算卸载策略.文献[58 ]研究基于多UAV联盟的UAV-MEC网络的计算卸载问题, 针对分层卸载特征, 给出一个离散的多领导者多跟随者的能量最小化Stackelberg博弈, 并证明纳什均衡的存在性; 仿真结果表明, 与现有的一些方法相比, 所提算法能够实现较低的网络能耗.文献[59 ]将人工智能引入UAV-MEC网络, 实现智能任务的卸载和资源的分配; 深度强化学习(deep reinforcement learning, DRL)是UAV-MEC系统中高效决策的无模型解决方案, 如任务卸载决策和计算资源分配; 深度神经网络(deep neural network, DNN)的拟合能力为UAV-MEC系统的计算任务预测提供一种方法; 预测结果可用于进一步提高多UAV协同卸载的性能.文献[60 ]针对UAV-MEC系统, 利用长短期记忆网络(long short term memory, LSTM)进行计算任务预测, 并在此基础上提出能耗最优的3层计算卸载算法; 实验表明, 该算法可以根据任务所需的时延、UAV高度和数据大小, 动态规划UAV-MEC网络的计算卸载策略, 从而有效降低UAV的能耗.文献[61 ]提出一个基于博弈理论和DRL算法框架用于多UAV与地面基站协同网络的计算卸载; 该框架可以通过马尔可夫决策过程求解多UAV与地面基站MEC服务器协同的计算卸载最优策略. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
AI-driven UAV-NOMA-MEC in next generation wireless networks
2
2021
... 文献[55 ]考虑UAV-MEC系统中, 最小化物联网设备的能量消耗以及UAV的能量消耗问题; 在所有物联网设备任务的时延约束和通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略; 仿真结果表明, 该方法显著降低了系统功耗.文献[56 ]研究UAV增强边缘计算网络的能量最小化问题, 将该优化问题表述为混合整数非凸优化问题, 并提出一种基于BCD和SCA技术的迭代优化算法, 降低完成任务的总能耗, 验证任务卸载的必要性.文献[57 ]在UAV计算卸载策略、资源分配和飞行轨迹调度的约束下, 最小化移动用户设备和UAV的平均加权能耗; 利用李雅普诺夫优化法分析计算任务队列, 并利用交替迭代优化法求解出了计算卸载策略.文献[58 ]研究基于多UAV联盟的UAV-MEC网络的计算卸载问题, 针对分层卸载特征, 给出一个离散的多领导者多跟随者的能量最小化Stackelberg博弈, 并证明纳什均衡的存在性; 仿真结果表明, 与现有的一些方法相比, 所提算法能够实现较低的网络能耗.文献[59 ]将人工智能引入UAV-MEC网络, 实现智能任务的卸载和资源的分配; 深度强化学习(deep reinforcement learning, DRL)是UAV-MEC系统中高效决策的无模型解决方案, 如任务卸载决策和计算资源分配; 深度神经网络(deep neural network, DNN)的拟合能力为UAV-MEC系统的计算任务预测提供一种方法; 预测结果可用于进一步提高多UAV协同卸载的性能.文献[60 ]针对UAV-MEC系统, 利用长短期记忆网络(long short term memory, LSTM)进行计算任务预测, 并在此基础上提出能耗最优的3层计算卸载算法; 实验表明, 该算法可以根据任务所需的时延、UAV高度和数据大小, 动态规划UAV-MEC网络的计算卸载策略, 从而有效降低UAV的能耗.文献[61 ]提出一个基于博弈理论和DRL算法框架用于多UAV与地面基站协同网络的计算卸载; 该框架可以通过马尔可夫决策过程求解多UAV与地面基站MEC服务器协同的计算卸载最优策略. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
Energy efficient for UAV-enabled mobile edge computing networks: intelligent task prediction and offloading
2
2020
... 文献[55 ]考虑UAV-MEC系统中, 最小化物联网设备的能量消耗以及UAV的能量消耗问题; 在所有物联网设备任务的时延约束和通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略; 仿真结果表明, 该方法显著降低了系统功耗.文献[56 ]研究UAV增强边缘计算网络的能量最小化问题, 将该优化问题表述为混合整数非凸优化问题, 并提出一种基于BCD和SCA技术的迭代优化算法, 降低完成任务的总能耗, 验证任务卸载的必要性.文献[57 ]在UAV计算卸载策略、资源分配和飞行轨迹调度的约束下, 最小化移动用户设备和UAV的平均加权能耗; 利用李雅普诺夫优化法分析计算任务队列, 并利用交替迭代优化法求解出了计算卸载策略.文献[58 ]研究基于多UAV联盟的UAV-MEC网络的计算卸载问题, 针对分层卸载特征, 给出一个离散的多领导者多跟随者的能量最小化Stackelberg博弈, 并证明纳什均衡的存在性; 仿真结果表明, 与现有的一些方法相比, 所提算法能够实现较低的网络能耗.文献[59 ]将人工智能引入UAV-MEC网络, 实现智能任务的卸载和资源的分配; 深度强化学习(deep reinforcement learning, DRL)是UAV-MEC系统中高效决策的无模型解决方案, 如任务卸载决策和计算资源分配; 深度神经网络(deep neural network, DNN)的拟合能力为UAV-MEC系统的计算任务预测提供一种方法; 预测结果可用于进一步提高多UAV协同卸载的性能.文献[60 ]针对UAV-MEC系统, 利用长短期记忆网络(long short term memory, LSTM)进行计算任务预测, 并在此基础上提出能耗最优的3层计算卸载算法; 实验表明, 该算法可以根据任务所需的时延、UAV高度和数据大小, 动态规划UAV-MEC网络的计算卸载策略, 从而有效降低UAV的能耗.文献[61 ]提出一个基于博弈理论和DRL算法框架用于多UAV与地面基站协同网络的计算卸载; 该框架可以通过马尔可夫决策过程求解多UAV与地面基站MEC服务器协同的计算卸载最优策略. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
Hierarchical game-theoretic and reinforcement learning framework for computational offloading in UAV-enabled mobile edge computing networks with multiple service providers
2
2019
... 文献[55 ]考虑UAV-MEC系统中, 最小化物联网设备的能量消耗以及UAV的能量消耗问题; 在所有物联网设备任务的时延约束和通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略; 仿真结果表明, 该方法显著降低了系统功耗.文献[56 ]研究UAV增强边缘计算网络的能量最小化问题, 将该优化问题表述为混合整数非凸优化问题, 并提出一种基于BCD和SCA技术的迭代优化算法, 降低完成任务的总能耗, 验证任务卸载的必要性.文献[57 ]在UAV计算卸载策略、资源分配和飞行轨迹调度的约束下, 最小化移动用户设备和UAV的平均加权能耗; 利用李雅普诺夫优化法分析计算任务队列, 并利用交替迭代优化法求解出了计算卸载策略.文献[58 ]研究基于多UAV联盟的UAV-MEC网络的计算卸载问题, 针对分层卸载特征, 给出一个离散的多领导者多跟随者的能量最小化Stackelberg博弈, 并证明纳什均衡的存在性; 仿真结果表明, 与现有的一些方法相比, 所提算法能够实现较低的网络能耗.文献[59 ]将人工智能引入UAV-MEC网络, 实现智能任务的卸载和资源的分配; 深度强化学习(deep reinforcement learning, DRL)是UAV-MEC系统中高效决策的无模型解决方案, 如任务卸载决策和计算资源分配; 深度神经网络(deep neural network, DNN)的拟合能力为UAV-MEC系统的计算任务预测提供一种方法; 预测结果可用于进一步提高多UAV协同卸载的性能.文献[60 ]针对UAV-MEC系统, 利用长短期记忆网络(long short term memory, LSTM)进行计算任务预测, 并在此基础上提出能耗最优的3层计算卸载算法; 实验表明, 该算法可以根据任务所需的时延、UAV高度和数据大小, 动态规划UAV-MEC网络的计算卸载策略, 从而有效降低UAV的能耗.文献[61 ]提出一个基于博弈理论和DRL算法框架用于多UAV与地面基站协同网络的计算卸载; 该框架可以通过马尔可夫决策过程求解多UAV与地面基站MEC服务器协同的计算卸载最优策略. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
Joint computation and communication design for UAV-assisted mobile edge computing in IoT
2
2020
... 文献[62 ]研究UAV-MEC具体场景, 其中每个终端可以使用3种计算策略, 即本地计算、卸载部分任务到UAV进行计算、通过UAV中继将任务卸载到基站, 文中通过优化计算卸载比特分配、时隙调度、和功率分配以及UAV轨迹权衡时延和能耗加权和, 并利用拉格朗日对偶法和SCA算法获得近似最优解.文献[63 ]研究计算卸载和资源分配的联合设计, 通过交替优化算法求解了权衡UAV能量和任务完成时间的帕累托最优解, 仿真结果证实所提解决方案能够达到UAV在MEC系统中完成时间和能量消耗之间的权衡.文献[29 ]研究UAV-MEC系统中最小化时间延迟和能量消耗的加权和的问题; 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性; 仿真结果表明, 该博弈论方案能够达到接近最优的性能.文献[64 ]考虑UAV作为用户设备的场景, 机载资源有限的处理能力和能量存储, 使复杂信号的实时分析受到限制; 此时, UAV可以对接边缘计算资源, 卸载计算任务, 降低对传感器输入的响应时间, 降低能耗; 而动态的信道条件和边缘服务器拥塞情况可能会影响任务卸载的性能; 提出一个基于网络、计算负荷参数和当前状态的最优卸载决策框架, 将时延和能耗的优化问题表述为半马尔可夫过程的最优停止时间问题, 并使用动态规划和DRL方法求解该问题.文献[65 ]提出一种基于深度Q网络(deep Q network, DQN)调整计算卸载比例的策略, 降低UAV-MEC网络中任务延迟和能量消耗的线性加权和.文献[66 ]考虑一个配备MEC服务器的多UAV集群网络, 每个UAV集群簇头作为一个智能体, 以分布式方法分配计算资源给终端设备; 提出一种基于无模型DRL的协同计算卸载与资源分配方案, 其中每个智能体基于深度确定性策略梯度(deep deterministic policy gradient, DDPG)网络训练并学习高效的计算卸载策略, 通过公平性指数检查各UAV的状态, 文中目标是通过自适应学习, 最大限度地减少任务的执行延迟和能量消耗, 并获得有效的计算卸载策略.文献[67 ]研究多UAV的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略使任务执行延迟和能量消耗之和最小化.文献[68 ]提出一种多智能体DDPG(multi-agent DDPG, MADDPG)框架, 共同优化多UAV的飞行路线和物联网设备的协同卸载决策, 降低任务处理延迟和设备能量消耗.表 2 总结对比了上述文献中不同计算卸载策略的求解方法. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
Completion time and energy optimization in the UAV-enabled mobile-edge computing system
2
2020
... 文献[62 ]研究UAV-MEC具体场景, 其中每个终端可以使用3种计算策略, 即本地计算、卸载部分任务到UAV进行计算、通过UAV中继将任务卸载到基站, 文中通过优化计算卸载比特分配、时隙调度、和功率分配以及UAV轨迹权衡时延和能耗加权和, 并利用拉格朗日对偶法和SCA算法获得近似最优解.文献[63 ]研究计算卸载和资源分配的联合设计, 通过交替优化算法求解了权衡UAV能量和任务完成时间的帕累托最优解, 仿真结果证实所提解决方案能够达到UAV在MEC系统中完成时间和能量消耗之间的权衡.文献[29 ]研究UAV-MEC系统中最小化时间延迟和能量消耗的加权和的问题; 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性; 仿真结果表明, 该博弈论方案能够达到接近最优的性能.文献[64 ]考虑UAV作为用户设备的场景, 机载资源有限的处理能力和能量存储, 使复杂信号的实时分析受到限制; 此时, UAV可以对接边缘计算资源, 卸载计算任务, 降低对传感器输入的响应时间, 降低能耗; 而动态的信道条件和边缘服务器拥塞情况可能会影响任务卸载的性能; 提出一个基于网络、计算负荷参数和当前状态的最优卸载决策框架, 将时延和能耗的优化问题表述为半马尔可夫过程的最优停止时间问题, 并使用动态规划和DRL方法求解该问题.文献[65 ]提出一种基于深度Q网络(deep Q network, DQN)调整计算卸载比例的策略, 降低UAV-MEC网络中任务延迟和能量消耗的线性加权和.文献[66 ]考虑一个配备MEC服务器的多UAV集群网络, 每个UAV集群簇头作为一个智能体, 以分布式方法分配计算资源给终端设备; 提出一种基于无模型DRL的协同计算卸载与资源分配方案, 其中每个智能体基于深度确定性策略梯度(deep deterministic policy gradient, DDPG)网络训练并学习高效的计算卸载策略, 通过公平性指数检查各UAV的状态, 文中目标是通过自适应学习, 最大限度地减少任务的执行延迟和能量消耗, 并获得有效的计算卸载策略.文献[67 ]研究多UAV的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略使任务执行延迟和能量消耗之和最小化.文献[68 ]提出一种多智能体DDPG(multi-agent DDPG, MADDPG)框架, 共同优化多UAV的飞行路线和物联网设备的协同卸载决策, 降低任务处理延迟和设备能量消耗.表 2 总结对比了上述文献中不同计算卸载策略的求解方法. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
Optimal edge computing for infrastructure-assisted UAV systems
2
2021
... 文献[62 ]研究UAV-MEC具体场景, 其中每个终端可以使用3种计算策略, 即本地计算、卸载部分任务到UAV进行计算、通过UAV中继将任务卸载到基站, 文中通过优化计算卸载比特分配、时隙调度、和功率分配以及UAV轨迹权衡时延和能耗加权和, 并利用拉格朗日对偶法和SCA算法获得近似最优解.文献[63 ]研究计算卸载和资源分配的联合设计, 通过交替优化算法求解了权衡UAV能量和任务完成时间的帕累托最优解, 仿真结果证实所提解决方案能够达到UAV在MEC系统中完成时间和能量消耗之间的权衡.文献[29 ]研究UAV-MEC系统中最小化时间延迟和能量消耗的加权和的问题; 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性; 仿真结果表明, 该博弈论方案能够达到接近最优的性能.文献[64 ]考虑UAV作为用户设备的场景, 机载资源有限的处理能力和能量存储, 使复杂信号的实时分析受到限制; 此时, UAV可以对接边缘计算资源, 卸载计算任务, 降低对传感器输入的响应时间, 降低能耗; 而动态的信道条件和边缘服务器拥塞情况可能会影响任务卸载的性能; 提出一个基于网络、计算负荷参数和当前状态的最优卸载决策框架, 将时延和能耗的优化问题表述为半马尔可夫过程的最优停止时间问题, 并使用动态规划和DRL方法求解该问题.文献[65 ]提出一种基于深度Q网络(deep Q network, DQN)调整计算卸载比例的策略, 降低UAV-MEC网络中任务延迟和能量消耗的线性加权和.文献[66 ]考虑一个配备MEC服务器的多UAV集群网络, 每个UAV集群簇头作为一个智能体, 以分布式方法分配计算资源给终端设备; 提出一种基于无模型DRL的协同计算卸载与资源分配方案, 其中每个智能体基于深度确定性策略梯度(deep deterministic policy gradient, DDPG)网络训练并学习高效的计算卸载策略, 通过公平性指数检查各UAV的状态, 文中目标是通过自适应学习, 最大限度地减少任务的执行延迟和能量消耗, 并获得有效的计算卸载策略.文献[67 ]研究多UAV的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略使任务执行延迟和能量消耗之和最小化.文献[68 ]提出一种多智能体DDPG(multi-agent DDPG, MADDPG)框架, 共同优化多UAV的飞行路线和物联网设备的协同卸载决策, 降低任务处理延迟和设备能量消耗.表 2 总结对比了上述文献中不同计算卸载策略的求解方法. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
Intelligent mobile edge computing networks for Internet of Things
2
2021
... 文献[62 ]研究UAV-MEC具体场景, 其中每个终端可以使用3种计算策略, 即本地计算、卸载部分任务到UAV进行计算、通过UAV中继将任务卸载到基站, 文中通过优化计算卸载比特分配、时隙调度、和功率分配以及UAV轨迹权衡时延和能耗加权和, 并利用拉格朗日对偶法和SCA算法获得近似最优解.文献[63 ]研究计算卸载和资源分配的联合设计, 通过交替优化算法求解了权衡UAV能量和任务完成时间的帕累托最优解, 仿真结果证实所提解决方案能够达到UAV在MEC系统中完成时间和能量消耗之间的权衡.文献[29 ]研究UAV-MEC系统中最小化时间延迟和能量消耗的加权和的问题; 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性; 仿真结果表明, 该博弈论方案能够达到接近最优的性能.文献[64 ]考虑UAV作为用户设备的场景, 机载资源有限的处理能力和能量存储, 使复杂信号的实时分析受到限制; 此时, UAV可以对接边缘计算资源, 卸载计算任务, 降低对传感器输入的响应时间, 降低能耗; 而动态的信道条件和边缘服务器拥塞情况可能会影响任务卸载的性能; 提出一个基于网络、计算负荷参数和当前状态的最优卸载决策框架, 将时延和能耗的优化问题表述为半马尔可夫过程的最优停止时间问题, 并使用动态规划和DRL方法求解该问题.文献[65 ]提出一种基于深度Q网络(deep Q network, DQN)调整计算卸载比例的策略, 降低UAV-MEC网络中任务延迟和能量消耗的线性加权和.文献[66 ]考虑一个配备MEC服务器的多UAV集群网络, 每个UAV集群簇头作为一个智能体, 以分布式方法分配计算资源给终端设备; 提出一种基于无模型DRL的协同计算卸载与资源分配方案, 其中每个智能体基于深度确定性策略梯度(deep deterministic policy gradient, DDPG)网络训练并学习高效的计算卸载策略, 通过公平性指数检查各UAV的状态, 文中目标是通过自适应学习, 最大限度地减少任务的执行延迟和能量消耗, 并获得有效的计算卸载策略.文献[67 ]研究多UAV的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略使任务执行延迟和能量消耗之和最小化.文献[68 ]提出一种多智能体DDPG(multi-agent DDPG, MADDPG)框架, 共同优化多UAV的飞行路线和物联网设备的协同卸载决策, 降低任务处理延迟和设备能量消耗.表 2 总结对比了上述文献中不同计算卸载策略的求解方法. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
Collaborative computation offloading and resource allocation in multi-UAV-assisted IoT networks: a deep reinforcement learning approach
2
2021
... 文献[62 ]研究UAV-MEC具体场景, 其中每个终端可以使用3种计算策略, 即本地计算、卸载部分任务到UAV进行计算、通过UAV中继将任务卸载到基站, 文中通过优化计算卸载比特分配、时隙调度、和功率分配以及UAV轨迹权衡时延和能耗加权和, 并利用拉格朗日对偶法和SCA算法获得近似最优解.文献[63 ]研究计算卸载和资源分配的联合设计, 通过交替优化算法求解了权衡UAV能量和任务完成时间的帕累托最优解, 仿真结果证实所提解决方案能够达到UAV在MEC系统中完成时间和能量消耗之间的权衡.文献[29 ]研究UAV-MEC系统中最小化时间延迟和能量消耗的加权和的问题; 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性; 仿真结果表明, 该博弈论方案能够达到接近最优的性能.文献[64 ]考虑UAV作为用户设备的场景, 机载资源有限的处理能力和能量存储, 使复杂信号的实时分析受到限制; 此时, UAV可以对接边缘计算资源, 卸载计算任务, 降低对传感器输入的响应时间, 降低能耗; 而动态的信道条件和边缘服务器拥塞情况可能会影响任务卸载的性能; 提出一个基于网络、计算负荷参数和当前状态的最优卸载决策框架, 将时延和能耗的优化问题表述为半马尔可夫过程的最优停止时间问题, 并使用动态规划和DRL方法求解该问题.文献[65 ]提出一种基于深度Q网络(deep Q network, DQN)调整计算卸载比例的策略, 降低UAV-MEC网络中任务延迟和能量消耗的线性加权和.文献[66 ]考虑一个配备MEC服务器的多UAV集群网络, 每个UAV集群簇头作为一个智能体, 以分布式方法分配计算资源给终端设备; 提出一种基于无模型DRL的协同计算卸载与资源分配方案, 其中每个智能体基于深度确定性策略梯度(deep deterministic policy gradient, DDPG)网络训练并学习高效的计算卸载策略, 通过公平性指数检查各UAV的状态, 文中目标是通过自适应学习, 最大限度地减少任务的执行延迟和能量消耗, 并获得有效的计算卸载策略.文献[67 ]研究多UAV的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略使任务执行延迟和能量消耗之和最小化.文献[68 ]提出一种多智能体DDPG(multi-agent DDPG, MADDPG)框架, 共同优化多UAV的飞行路线和物联网设备的协同卸载决策, 降低任务处理延迟和设备能量消耗.表 2 总结对比了上述文献中不同计算卸载策略的求解方法. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
Multi-agent deep reinforcement learning for task offloading in UAV-assisted mobile edge computing
2
2022
... 文献[62 ]研究UAV-MEC具体场景, 其中每个终端可以使用3种计算策略, 即本地计算、卸载部分任务到UAV进行计算、通过UAV中继将任务卸载到基站, 文中通过优化计算卸载比特分配、时隙调度、和功率分配以及UAV轨迹权衡时延和能耗加权和, 并利用拉格朗日对偶法和SCA算法获得近似最优解.文献[63 ]研究计算卸载和资源分配的联合设计, 通过交替优化算法求解了权衡UAV能量和任务完成时间的帕累托最优解, 仿真结果证实所提解决方案能够达到UAV在MEC系统中完成时间和能量消耗之间的权衡.文献[29 ]研究UAV-MEC系统中最小化时间延迟和能量消耗的加权和的问题; 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性; 仿真结果表明, 该博弈论方案能够达到接近最优的性能.文献[64 ]考虑UAV作为用户设备的场景, 机载资源有限的处理能力和能量存储, 使复杂信号的实时分析受到限制; 此时, UAV可以对接边缘计算资源, 卸载计算任务, 降低对传感器输入的响应时间, 降低能耗; 而动态的信道条件和边缘服务器拥塞情况可能会影响任务卸载的性能; 提出一个基于网络、计算负荷参数和当前状态的最优卸载决策框架, 将时延和能耗的优化问题表述为半马尔可夫过程的最优停止时间问题, 并使用动态规划和DRL方法求解该问题.文献[65 ]提出一种基于深度Q网络(deep Q network, DQN)调整计算卸载比例的策略, 降低UAV-MEC网络中任务延迟和能量消耗的线性加权和.文献[66 ]考虑一个配备MEC服务器的多UAV集群网络, 每个UAV集群簇头作为一个智能体, 以分布式方法分配计算资源给终端设备; 提出一种基于无模型DRL的协同计算卸载与资源分配方案, 其中每个智能体基于深度确定性策略梯度(deep deterministic policy gradient, DDPG)网络训练并学习高效的计算卸载策略, 通过公平性指数检查各UAV的状态, 文中目标是通过自适应学习, 最大限度地减少任务的执行延迟和能量消耗, 并获得有效的计算卸载策略.文献[67 ]研究多UAV的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略使任务执行延迟和能量消耗之和最小化.文献[68 ]提出一种多智能体DDPG(multi-agent DDPG, MADDPG)框架, 共同优化多UAV的飞行路线和物联网设备的协同卸载决策, 降低任务处理延迟和设备能量消耗.表 2 总结对比了上述文献中不同计算卸载策略的求解方法. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...
2
... 文献[62 ]研究UAV-MEC具体场景, 其中每个终端可以使用3种计算策略, 即本地计算、卸载部分任务到UAV进行计算、通过UAV中继将任务卸载到基站, 文中通过优化计算卸载比特分配、时隙调度、和功率分配以及UAV轨迹权衡时延和能耗加权和, 并利用拉格朗日对偶法和SCA算法获得近似最优解.文献[63 ]研究计算卸载和资源分配的联合设计, 通过交替优化算法求解了权衡UAV能量和任务完成时间的帕累托最优解, 仿真结果证实所提解决方案能够达到UAV在MEC系统中完成时间和能量消耗之间的权衡.文献[29 ]研究UAV-MEC系统中最小化时间延迟和能量消耗的加权和的问题; 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性; 仿真结果表明, 该博弈论方案能够达到接近最优的性能.文献[64 ]考虑UAV作为用户设备的场景, 机载资源有限的处理能力和能量存储, 使复杂信号的实时分析受到限制; 此时, UAV可以对接边缘计算资源, 卸载计算任务, 降低对传感器输入的响应时间, 降低能耗; 而动态的信道条件和边缘服务器拥塞情况可能会影响任务卸载的性能; 提出一个基于网络、计算负荷参数和当前状态的最优卸载决策框架, 将时延和能耗的优化问题表述为半马尔可夫过程的最优停止时间问题, 并使用动态规划和DRL方法求解该问题.文献[65 ]提出一种基于深度Q网络(deep Q network, DQN)调整计算卸载比例的策略, 降低UAV-MEC网络中任务延迟和能量消耗的线性加权和.文献[66 ]考虑一个配备MEC服务器的多UAV集群网络, 每个UAV集群簇头作为一个智能体, 以分布式方法分配计算资源给终端设备; 提出一种基于无模型DRL的协同计算卸载与资源分配方案, 其中每个智能体基于深度确定性策略梯度(deep deterministic policy gradient, DDPG)网络训练并学习高效的计算卸载策略, 通过公平性指数检查各UAV的状态, 文中目标是通过自适应学习, 最大限度地减少任务的执行延迟和能量消耗, 并获得有效的计算卸载策略.文献[67 ]研究多UAV的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略使任务执行延迟和能量消耗之和最小化.文献[68 ]提出一种多智能体DDPG(multi-agent DDPG, MADDPG)框架, 共同优化多UAV的飞行路线和物联网设备的协同卸载决策, 降低任务处理延迟和设备能量消耗.表 2 总结对比了上述文献中不同计算卸载策略的求解方法. ...
... Summary and comparison of computation offloading strategies methods in UAV-MEC network
Table 2 文献 场景 优化目标 方法分类 计算卸载策略求解方法 [47 ] 单无人机 降低时延 非凸优化 在引入辅助变量的基础上, 提出一种改进的基于惩罚对偶分解的算法 [48 ] 单无人机 降低时延 非凸优化 采用ADMM、Dinkelbach算法和SCA算法得到最优的卸载策略 [49 ] 多无人机 降低时延 非凸优化 利用SCA算法解决在无人机能量受限的情况下进行计算卸载决策的问题 [50 ] 多无人机 降低时延 非凸优化 多无人机协同提供计算服务, 基于BCD和SCA技术最小化任务时延 [51 ] 多无人机 降低时延 非凸优化 多无人机边缘云协同卸载, 利用李雅普诺夫优化方法进行在线任务卸载决策 [52 ] 多无人机 降低时延 非凸优化 将计算任务卸载问题转化为双边匹配问题, 使每架无人机与设备相匹配 [53 ] 多无人机 降低时延 博弈论 提出一种基于Stackelberg博弈方法求解UAV-MEC网络中计算卸载决策问题 [54 ] 多无人机 降低时延 智能算法 提出基于MARL算法的计算卸载策略, 选择合适的无人机, 实现协同任务卸载 [55 ] 单无人机 降低能耗 非凸优化 在通信计算容量资源的限制下, 使用BCD算法交替求解得出最佳的任务分配策略 [56 ] 单无人机 降低能耗 非凸优化 提出一种基于BCD和SCA技术的迭代优化算法最小化UAV-MEC网络能量消耗 [57 ] 单无人机 降低能耗 非凸优化 利用李雅普诺夫优化法和交替迭代优化法, 分析任务队列、求解出计算卸载策略 [58 ] 多无人机 降低能耗 博弈论 针对分层卸载特征, 构建离散的多领导者多跟随者的能量最小化Stackelberg博弈 [59 ] 多无人机 降低能耗 智能算法 利用DRL网络进行任务卸载决策并通过DNN网络进行计算任务预测 [60 ] 单无人机 降低能耗 智能算法 利用LSTM网络进行计算任务预测, 提出了能耗最优的3层计算卸载算法 [61 ] 多无人机 降低能耗 智能算法 提出基于博弈理论和DRL算法框架用于多无人机与地面基站协同的计算卸载 [62 ] 单无人机 权衡时延和能耗 非凸优化 利用拉格朗日对偶法和SCA算法获得近似最优解、求解计算卸载策略 [63 ] 单无人机 权衡时延和能耗 非凸优化 通过交替优化算法求解平衡无人机能量和任务完成时间的帕累托最优解 [29 ] 单无人机 权衡时延和能耗 博弈论 提出一个基于博弈论的方案来寻找最优计算卸载策略并证明纳什均衡的存在性 [64 ] 单无人机 权衡时延和能耗 智能算法 将优化问题表述为半马尔可夫过程, 使用动态规划和DRL算法求解最优卸载决策 [65 ] 单无人机 权衡时延和能耗 智能算法 提出基于DQN网络调整计算卸载比例的计算卸载策略 [66 ] 多无人机 权衡时延和能耗 智能算法 提出基于DDPG网络的计算卸载策略, 并通过公平性指数检查各无人机的状态 [67 ] 多无人机 权衡时延和能耗 智能算法 研究多无人机的协同MEC系统, 提出一种协作式MARL框架求解任务卸载策略 [68 ] 多无人机 权衡时延和能耗 智能算法 利用MADDPG框架, 优化多无人机的协同卸载决策, 降低时延与设备能量消耗
3 未来研究方向 UAV-MEC网络具备部署灵活、在网络边缘及时提供计算能力、降低任务处理时延等优点.虽然已经有大量研究人员对UAV-MEC网络的相关问题进行了研究, 但是该方向尚处于起步阶段, 仍然存在一些尚未解决的问题. ...


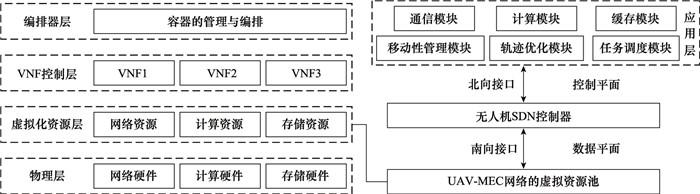
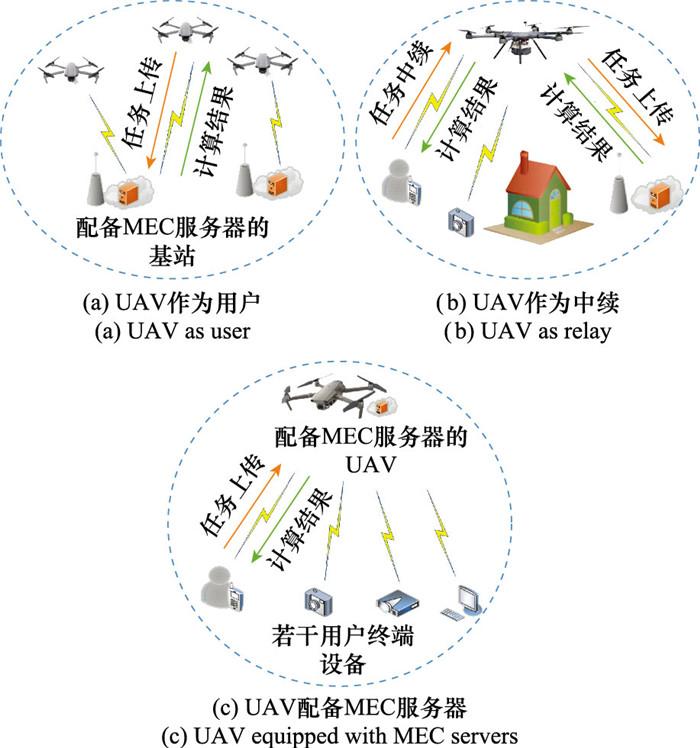
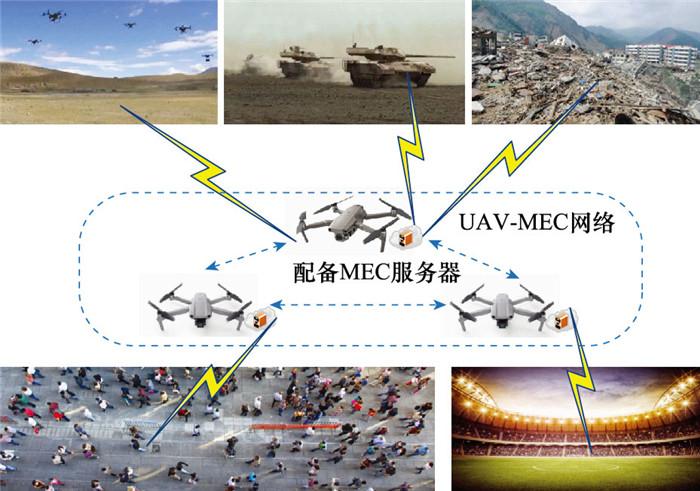
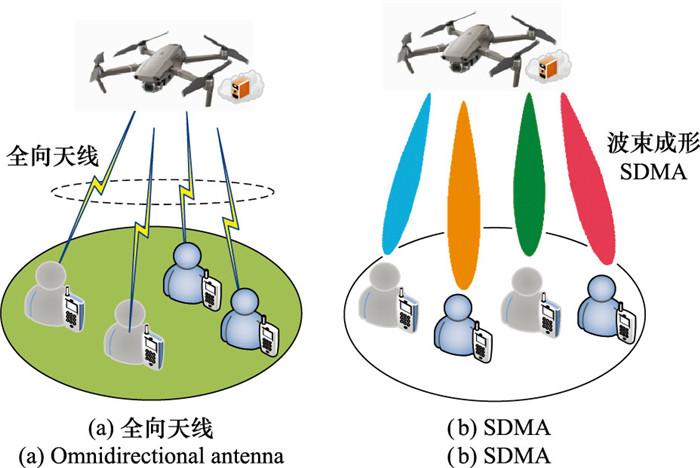
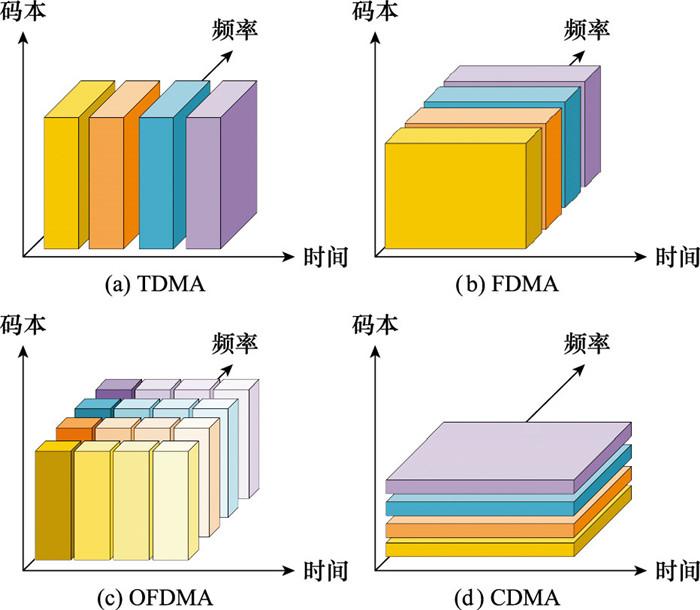
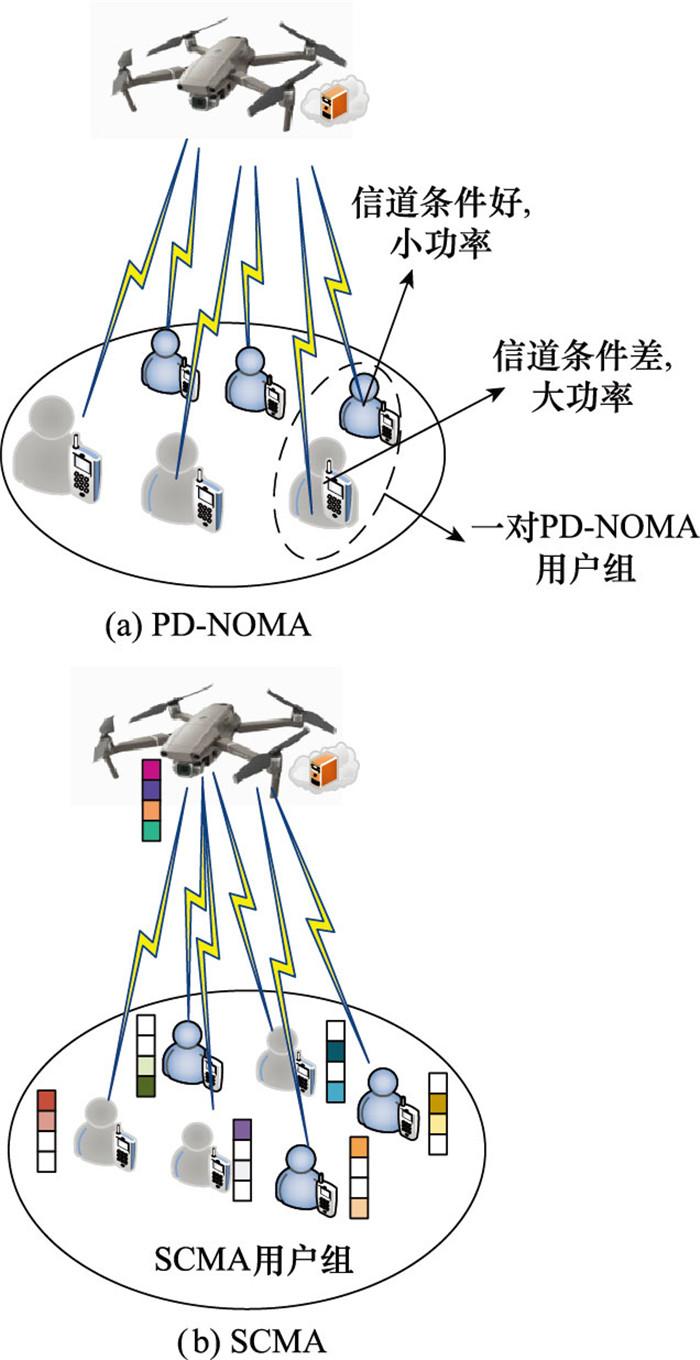

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}