[2]
MOREIRA A , PRATS-IRAOLA P , YOUNIS M , et al . A tutorial on synthetic aperture radar
[J]. IEEE Geoscience and Remote Sensing Magazine , 2013 , 1 (1 ): 6 - 43 .
DOI:10.1109/MGRS.2013.2248301
[本文引用: 1]
[3]
保铮 , 邢孟道 , 王彤 . 雷达成像技术 [M]. 北京 : 电子工业出版社 , 2005 .
[本文引用: 1]
BAO Z , XING M D , WANG T . Radar imaging technology [M]. Beijing : Publishing House of Electronics Industry , 2005 .
[本文引用: 1]
[4]
李涛 , 唐新明 , 高小明 , 等 . SAR卫星业务化地形测绘能力分析与展望
[J]. 测绘学报 , 2021 , 50 (7 ): 891 - 904 .
URL
[本文引用: 1]
LI T , TANG X M , GAO X M , et al . Analysis and outlook of the operational topographic surveying and mapping capability of the SAR satellites
[J]. Acta Geodaetica et Cartographica Sinica , 2021 , 50 (7 ): 891 - 904 .
URL
[本文引用: 1]
[5]
方臣 , 胡飞 , 陈曦 , 等 . 自然资源遥感应用研究进展
[J]. 资源环境与工程 , 2019 , 33 (4 ): 563 - 569 .
URL
[本文引用: 1]
FANG C , HU F , CHEN X , et al . Advances in application of remote sensing to natural resources
[J]. Resources Environment & Engineering , 2019 , 33 (4 ): 563 - 569 .
URL
[本文引用: 1]
[6]
黄国满 , 程春泉 , 赵争 , 等 . 机载SAR遥感测图技术及应用
[J]. 测绘科学 , 2019 , 44 (6 ): 105 - 113 .
URL
[本文引用: 1]
HUANG G M , CHENG C Q , ZHAO Z , et al . Mapping technology and application of airborne SAR
[J]. Science of Surveying and Mapping , 2019 , 44 (6 ): 105 - 113 .
URL
[本文引用: 1]
[7]
范西昆 , 何丽娜 . 美军地面战场态势感知系统发展启示
[J]. 现代雷达 , 2018 , 40 (5 ): 5-7, 12 .
URL
[本文引用: 1]
FAN X K , HE L N . The development of U. S ground battlefield situational awareness system and its implications
[J]. Modern Radar , 2018 , 40 (5 ): 5-7, 12 .
URL
[本文引用: 1]
[8]
明婧. 多基线干涉SAR高精度高程反演方法研究[D]. 成都: 电子科技大学, 2020.
[本文引用: 1]
MING J. A research of high-precision elevation reconstruction method on multi-baseline interferometric SAR[D]. Chengdu: University of Electronic Science and Technology of China, 2020.
[本文引用: 1]
[9]
杨祥立. 多极化SAR图像相干斑滤波与变化检测研究[D]. 武汉: 武汉大学, 2020.
[本文引用: 1]
YANG X L. Speckle reduction and change detection multi-polarization SAR images[D]. Wuhan: Wuhan University, 2020.
[本文引用: 1]
[10]
BISHOP E, LINNEHAN R, DOERRY A. Video-SAR using higher order Taylor terms for differential range[C]//Proc. of the IEEE Radar Conference, 2016.
[本文引用: 5]
[11]
PALM S, WAHLEN A, STANKO S, et al. Real-time onboard processing and ground based monitoring of FMCW-SAR videos[C]//Proc. of the 10th European Conference on Synthetic Aperture Radar, 2014.
[12]
HUANG X J , DING J X , GUO Q H . Unsupervised Image Registration for VIDEO SAR
[J]. IEEE Journal of Selected Topics in Applied Earth Observation and Remote Sensing , 2021 , 14 (1 ): 1075 - 1083 .
[本文引用: 1]
[13]
WALLACE H B. DARPA MMW system programs and how they drive compound semiconductor technology needs[C]//Proc. of the IEEE Compound Semiconductor Integrated Circuit Symposium, 2015.
[14]
DAMINI A, BALAJI B, PARRY C, et al. A videoSAR mode for the X-band wideband experimental airborne radar[C]//Proc. of the SPIE-the International Society for Optical Engineering, 2010: 135-145.
[本文引用: 1]
[15]
DAMINI A, MANTLE V, DAVIDSON G. A new approach to coherent change detection in VideoSAR imagery using stack averaged coherence[C]//Proc. of the IEEE Radar Conference, 2013.
[本文引用: 1]
[16]
WELLS L, SORENSEN K, DOERRY A, et al. Developments in SAR and IFSAR systems and technologies at sandia national laboratories[C]//Proc. of the IEEE Aerospace Conference, 2003: 1085-1095.
[本文引用: 1]
[17]
WALLACE H B. Development of a video SAR for FMV through clouds[C]//Proc. of the SPIE Open Architecture/Open Business Model Net-Centric Systems and Defense Transformation, 2015: 64-65.
[本文引用: 1]
[18]
肖忠源, 张振华, 马晓萌. 视频SAR发展现状研究[C]//第三届航天电子战略研究论坛, 2017: 37-40.
[本文引用: 1]
XIAO Z Y, ZHANG Z H, MA X M. Research on the development of video SAR[C]//Proc. of the 3rd Aerospace Electronics Strategy Research Forum, 2017: 37-40.
[本文引用: 1]
[19]
CERUTTI-MAORI D , KLARE J , BRENNER A R , et al . Wide-area traffic monitoring with the SAR/GMTI system PAMIR
[J]. IEEE Trans. on Geoscience and Remote Sensing , 2008 , 46 (10 ): 3019 - 3030 .
DOI:10.1109/TGRS.2008.923026
[本文引用: 1]
[20]
ROSEN P A , HENSLEY S , JOUGHIN I R , et al . Synthetic aperture radar interferometry
[J]. Proceedings of the IEEE , 2000 , 88 (3 ): 333 - 382 .
DOI:10.1109/5.838084
[本文引用: 1]
[21]
YAN H, MAO X H, ZHANG J D, et al. Frame rate analysis of video synthetic aperture radar (ViSAR)[C]//Proc. of the IEEE International Symposium on Antennas and Propagation, 2016: 446-447.
[本文引用: 1]
[22]
邢孟道 , 林浩 , 陈溅来 , 等 . 多平台合成孔径雷达成像算法综述
[J]. 雷达学报 , 2019 , 8 (6 ): 732 - 757 .
URL
[本文引用: 1]
XING M D , LIN H , CHEN J L , et al . A review of imaging algorithms in multi-platform-borne synthetic aperture radar
[J]. Journal of Radars , 2019 , 8 (6 ): 732 - 757 .
URL
[本文引用: 1]
[23]
范文娜. 基于电磁模型的大斜视SAR成像研究[D]. 西安: 西安电子科技大学, 2019.
FAN W N. Research on highly squinted SAR imaging based on electromagnetic model[D]. Xi'an: Xidian University, 2019.
[24]
HU R Z , MIN R , PI Y M . A video-SAR imaging technique for aspect-dependent scattering in wide angle
[J]. IEEE Sensors Journal , 2017 , 17 (12 ): 3677 - 3688 .
DOI:10.1109/JSEN.2017.2698161
[25]
胡睿智. 视频合成孔径雷达成像理论与关键技术研究[D]. 成都: 电子科技大学, 2018.
[本文引用: 1]
HU R Z. Research on imaging theory and key technology of video synthetic aperture radar[D]. Chengdu: University of Electronic Science and Technology of China, 2018.
[本文引用: 1]
[26]
SOUMEKH M . Synthetic aperture radar signal processing [M]. New York : Wiley , 1999 .
[本文引用: 1]
[27]
JAKOWATZ C V J , WAHL D E , EICHEL P H , et al . Spotlight-mode synthetic aperture radar: a signal processing approach: a signal processing approach [M]. New York : Springer , 2012 .
[本文引用: 2]
[28]
HARMONY D W, BICKEL D L, MARTINEZ A. A velocity independent continuous tracking radar concept[R]. Albuquerque: Sandia National Lab, 2011.
[本文引用: 1]
[29]
WALLACE H, GORMAN J, MALONEY P. Video synthetic aperture radar (ViSAR)[R]. Arlington: Defense Advanced Research Projects Agency, 2012.
[本文引用: 2]
[30]
左峰. 视频合成孔径雷达成像算法研究[D]. 成都: 电子科技大学, 2019.
[本文引用: 2]
ZUO F. Research on video synthetic aperture radar imaging algorithm[D]. Chengdu: University of Electronic Science and Technology of China, 2019.
[本文引用: 2]
[31]
BIELEK T P, THOMPSON D G, WALKER B C. Synthetic aperture design for increased SAR image Rate[P]. U.S. : Patent 7498968, 2009-03-03.
[本文引用: 2]
[32]
GU C F, CHANG W G. An efficient geometric distortion correction method for SAR video formation[C]//Proc. of the IEEE International Conference on Modern Circuits and Systems Technologies, 2016.
[本文引用: 1]
[33]
SANDIA NATIONAL LABORATORIES. Eubank gate and traffic VideoSAR[EB/OL]. [2023-01-10]. https://www.sandia.gov/radar/video/index.html .
[本文引用: 1]
[34]
KIM S H, FAN R, DOMINSKI F. ViSAR: a 235 GHz radar for airborne applications[C]//Proc. of the IEEE Radar Confe-rence, 2018: 1549-1554.
[本文引用: 1]
[35]
MILLER J, BISHOP E, DOERRY A. An application of back projection for video SAR image formation exploiting a subaperature circular shift register[C]//Proc. of SPIE-the International Society for Optical Engineering, 2013: 66-79.
[本文引用: 2]
[36]
STANKO S, CARIS M, WAHLEN A, et al. Millimeter resolution with radar at lower terahertz[C]//Proc. of the IEEE International Radar Symposium, 2013: 235-238.
[本文引用: 1]
[37]
CARIS M, STANKO S, PALM S, et al. 300 GHz radar for high resolution SAR and ISAR applications[C]//Proc. of the IEEE International Radar Symposium, 2015: 577-580.
[本文引用: 1]
[38]
STANKO S, PALM S, SOMMER R, et al. Millimeter resolution SAR imaging of infrastructure in the lower THz region using MIRANDA-300[C]//Proc. of the IEEE European Microwave Conference, 2016: 1505-1508.
[39]
PALM S, SOMMER R, CARIS M, et al. Ultra-high resolution SAR in lower terahertz domain for applications in mobile mapping[C]//Proc. of the IEEE German Microwave Confe-rence, 2016: 205-208.
[40]
PALM S , SOMMER R , TESSMANN A , et al . Ultra-high resolution imaging of facades and vertical infrastructure by carborne SAR and airborne CSAR
[J]. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences , 2019 , 129 - 136 .
[本文引用: 1]
[41]
KIM S , YU J , JEON S Y , et al . Signal processing for a multiple-input, multiple-output (MIMO) video synthetic aperture radar (SAR) with beat frequency division frequency-modulated continuous wave (FMCW)
[J]. Remote Sensing , 2017 , 9 (5 ): 491 .
DOI:10.3390/rs9050491
[本文引用: 1]
[42]
KIM S. SAR video generation of MIMO video SAR with beat frequency division FMCW[C]//Proc. of the IEEE International Conference on Signal Processing and Communication Systems, 2017.
[本文引用: 1]
[43]
ZHANG B , PI Y M , LI J . Terahertz imaging radar with inverse aperture synthesis techniques: system structure, signal processing, and experiment results
[J]. IEEE Sensors Journal , 2014 , 15 (1 ): 290 - 299 .
[本文引用: 2]
[44]
ZHAO S T, CHEN J, YANG W, et al. Image formation method for spaceborne video SAR[C]//Proc. of the IEEE Asia-Pacific Conference on Synthetic Aperture Radar, 2015: 148-151.
[本文引用: 3]
[45]
梁健 , 张润宁 , 包敏凤 . 天基视频SAR系统设计及成像算法研究
[J]. 中国空间科学技术 , 2016 , 36 (6 ): 22 - 28 .
URL
[本文引用: 5]
LIANG J , ZHANG R N , BAO M F . Research on spaceborne video SAR system design and image formation algorithm
[J]. Chinese Space Science and Technology , 2016 , 36 (6 ): 22 - 28 .
URL
[本文引用: 5]
[46]
GU C F, CHANG W G, LI X Y, et al. The formation of high-resolution FMCW SAR video[C]//Proc. of the IEEE Progress in Electromagnetic Research Symposium, 2016: 496-499.
[本文引用: 2]
[47]
GU C F, CHANG W G. An efficient geometric distortion correction method for SAR video formation[C]//Proc. of the IEEE International Conference on Modern Circuits and Systems Technologies, 2016.
[本文引用: 1]
[48]
宋晓燊 , 禹卫东 . 条带式VideoSAR参数依赖关系的推导及应用
[J]. 中国科学院大学学报 , 2016 , 33 (1 ): 121 - 127 .
URL
[本文引用: 2]
SONG X S , YU W D . Derivation and application of stripmap VideoSAR parameter relations
[J]. Journal of University of Chinese Academy of Sciences , 2016 , 33 (1 ): 121 - 127 .
URL
[本文引用: 2]
[49]
YAN H, MAO X H, ZHANG J D, et al. Frame rate analysis of video synthetic aperture radar (ViSAR)[C]//Proc. of the IEEE International Symposium on Antennas and Propagation, 2016: 446-447.
[本文引用: 2]
[50]
李大圣 , 吴福伟 , 孙俊 , 等 . 一种220 GHz波段太赫兹合成孔径成像雷达
[J]. 微波学报 , 2018 , 34 (4 ): 55 - 59 .
URL
[本文引用: 5]
LI D S , WU F W , SUN J , et al . Terahertz synthetic aperture imaging radar based on 220 GHz band
[J]. Journal of Microwave Science , 2018 , 34 (4 ): 55 - 59 .
URL
[本文引用: 5]
[51]
郑南南. 视频SAR信号产生与采集处理组件设计[D]. 西安: 西安电子科技大学, 2021.
[本文引用: 3]
ZHENG N N. Design of video SAR Signal Generation and acquisition module[D]. Xi'an: Xidian University, 2021.
[本文引用: 3]
[52]
SONG X S , YU W D . Processing video-SAR data with the fast back projection method
[J]. IEEE Trans. on Aerospace and Electronic Systems , 2016 , 52 (6 ): 2838 - 2848 .
DOI:10.1109/TAES.2016.150581
[本文引用: 2]
[53]
RIGLING B D , MOSES R L . Taylor expansion of the differential range for monostatic SAR
[J]. IEEE Trans. on Aerospace and Electronic Systems , 2005 , 41 (1 ): 60 - 64 .
DOI:10.1109/TAES.2005.1413746
[本文引用: 1]
[54]
MOSES R L , ASH J N . An autoregressive formulation for SAR back projection imaging
[J]. IEEE Trans. on Aerospace and Electronic Systems , 2011 , 47 (4 ): 2860 - 2873 .
DOI:10.1109/TAES.2011.6034669
[本文引用: 1]
[55]
梁健 , 张润宁 . GEO-LEO双站视频SAR系统若干问题研究
[J]. 现代雷达 , 2017 , 39 (3 ): 17 - 20 .
URL
[本文引用: 1]
LIANG J , ZHANG R N . A study on key technologies of spaceborne video SAR system based on GEO-LEO bistatic model
[J]. Modern Radar , 2017 , 39 (3 ): 17 - 20 .
URL
[本文引用: 1]
[56]
HAWLEY R W, GARBER W L. Aperture weighting technique for video synthetic aperture radar[C]//Proc. of SPIE-the International Society for Optical Engineering, 2011: 67-73.
[本文引用: 1]
[57]
WALKER J L . Range-Doppler imaging of rotating objects
[J]. IEEE Trans. on Aerospace and Electronic Systems , 1980 , AES-16 (1 ): 23 - 52 .
DOI:10.1109/TAES.1980.308875
[本文引用: 1]
[58]
ZHU D Y , ZHU Z D . Range resampling in the polar format algorithm for spotlight SAR image formation using the Chirp-Z-transform
[J]. IEEE Trans. on Signal Processing , 2007 , 55 (3 ): 1011 - 1023 .
DOI:10.1109/TSP.2006.887144
[本文引用: 1]
[59]
DOERRY A W. Forming rotated SAR images by real-time motion compensation[R]. Albuquerque: Sandia National Lab, 2012.
[本文引用: 1]
[60]
ZUO F, LI J. A persistent imaging method for video-SAR in terahertz band[C]//Proc. of the IEEE International Applied Computational Electromagnetics Society Symposium, 2017.
[本文引用: 3]
[61]
HU R Z , MIN R , PI Y M . Interpolation-free algorithm for persistent multi-frame imaging of video-SAR
[J]. IET Radar, Sonar & Navigation , 2017 , 11 (6 ): 978 - 986 .
[本文引用: 1]
[62]
JIANG J W, LI Y W, ZHENG Q B. A THz video SAR imaging algorithm based on chirp scaling[C]//Proc. of the CIE International Conference on Radar, 2021: 656-660.
[本文引用: 1]
[63]
PU W , WU J J , HUANG Y L , et al . ORTP: a video SAR imaging algorithm based on low-tubal-rank tensor recovery
[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing , 2022 , 15 (1 ): 1293 - 1308 .
[本文引用: 1]
[64]
KANTOR J M. Minimum entropy autofocus correction of residual range cell migration[C]//Proc. of the IEEE Radar Conference, 2017: 11-16.
[本文引用: 1]
[65]
JIA G W , CHANG W G , ZHANG Q L , et al . The analysis and realization of motion compensation for circular synthetic aperture radar data
[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing , 2016 , 9 (7 ): 3060 - 3071 .
DOI:10.1109/JSTARS.2016.2553051
[本文引用: 1]
[66]
LINNEHAN R, MILLER J, BISHOP E, et al. An autofocus technique for video-SAR[C]//Proc. of the 20th Conference on Algorithms for Synthetic Aperture Radar Imagery, 2013: 56-65.
[本文引用: 1]
[67]
孙伟 , 孙进平 , 张远 , 等 . 大斜视直升机载太赫兹ViSAR振动补偿成像算法
[J]. 北京航空航天大学学报 , 2016 , 42 (12 ): 2755 - 2761 .
URL
[本文引用: 1]
SUN W , SUN J P , ZHANG Y , et al . High squint helicopter-borne terahertz ViSAR vibration compensation imaging algorithm
[J]. Journal of Beijing University of Aeronautics and Astronautics , 2016 , 42 (12 ): 2755 - 2761 .
URL
[本文引用: 1]
[68]
赵雨露 , 张群英 , 李超 , 等 . 视频合成孔径雷达振动误差分析及补偿方案研究
[J]. 雷达学报 , 2015 , 4 (2 ): 230 - 239 .
URL
[本文引用: 1]
ZHAO Y L , ZHANG Q Y , LI C , et al . Vibration error analysis and motion compensation of video synthetic aperture radar
[J]. Journal of Radars , 2015 , 4 (2 ): 230 - 239 .
URL
[本文引用: 1]
[69]
YANG X Q , SHI J , ZHOU Y Y , et al . Ground moving target tracking and refocusing using shadow in video-SAR
[J]. Remote Sensing , 2020 , 12 (18 ): 3083 .
DOI:10.3390/rs12183083
[本文引用: 2]
[70]
JAHANGIR M. Moving target detection for synthetic aperture radar via shadow detection[C]//Proc. of the IET International Conference on Radar Systems, 2007.
[本文引用: 1]
[71]
RAYNAL A M, BICKEL D L, DOERRY A W. Stationary and moving target shadow characteristics in synthetic aperture radar[C]//Proc. of the 18th Conference on Radar Sensor Technology, 2014: 413-427.
[本文引用: 1]
[72]
RAYNAL A M, DOERRY A W, MILLER J A, et al. Shadow probability of detection and false alarm for median-filtered SAR imagery[R]. Albuquerque: Sandia National Lab, 2014.
[本文引用: 1]
[73]
何志华 , 陈兴 , 于春锐 , 等 . 一种稳健的视频SAR动目标阴影检测与跟踪处理方法
[J]. 电子与信息学报 , 2022 , 44 (11 ): 3882 - 3890 .
DOI:10.11999/JEIT210853
[本文引用: 1]
HE Z H , CHEN X , YU C R , et al . A robust moving target shadow detection and tracking method for VideoSAR
[J]. Journal of Electronics and Information Science , 2022 , 44 (11 ): 3882 - 3890 .
DOI:10.11999/JEIT210853
[本文引用: 1]
[74]
李锦伟, 张升, 李财品. 一种星载视频SAR动目标恒虚警检测方法[C]//第六届高分辨率对地观测学术年会, 2019: 58-80.
[本文引用: 1]
LI J W, ZHANG S, LI C P. A CFAR detection method for spaceborne video SAR moving targets[C]//Proc. of the 6th Annual Conference of High Resolution Earth Observation, 2019: 58-80.
[本文引用: 1]
[75]
WANG H , CHEN Z S , ZHENG S C . Preliminary research of low-RCS moving target detection based on Ka-band video SAR
[J]. IEEE Geoscience and Remote Sensing Letters , 2017 , 14 (6 ): 811 - 815 .
[本文引用: 1]
[76]
聊蕾 , 左潇丽 , 云涛 , 等 . 基于图像序列的VideoSAR动目标检测方法
[J]. 雷达科学与技术 , 2016 , 14 (6 ): 563-567, 573 .
URL
[本文引用: 1]
LIAO L , ZUO X L , YUN T , et al . An approach to detect moving target in VideoSAR imagery sequence
[J]. Radar Science and Technology , 2016 , 14 (6 ): 563-567, 573 .
URL
[本文引用: 1]
[77]
GOU L T, ZHU D Y, LI Y. A novel moving target detection method for VideoSAR[C]//Proc. of the IEEE International Applied Computational Electromagnetics Society Symposium, 2019.
[本文引用: 1]
[78]
ZHONG C , DING J S , ZHANG Y H . Video SAR moving target tracking using joint kernelized correlation filter
[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing , 2022 , 15 , 1481 - 1493 .
[本文引用: 1]
[79]
ZHANG Y, YANG S Y, LI H B, et al. Shadow tracking of moving target based on CNN for video SAR system[C]//Proc. of the IEEE International Geoscience and Remote Sensing Symposium, 2018: 4399-4402.
[本文引用: 1]
[80]
丁金闪 . 视频SAR成像与动目标阴影检测技术
[J]. 雷达学报 , 2020 , 9 (2 ): 321 - 334 .
URL
[本文引用: 2]
DING J S . Focusing algorithms and moving target detection based on video SAR
[J]. Journal of Radars , 2020 , 9 (2 ): 321 - 334 .
URL
[本文引用: 2]
[81]
丁金闪 , 仲超 , 温利武 , 等 . 视频合成孔径雷达双域联合运动目标检测方法
[J]. 雷达学报 , 2022 , 11 (3 ): 313 - 323 .
URL
[本文引用: 2]
DING J S , ZHONG C , WEN L W , et al . Joint detection of moving target in video synthetic aperture radar
[J]. Journal of Radars , 2022 , 11 (3 ): 313 - 323 .
URL
[本文引用: 2]
[82]
闫贺 , 黄佳 , 李睿安 , 等 . 基于改进快速区域卷积神经网络的视频SAR运动目标检测算法研究
[J]. 电子与信息学报 , 2021 , 43 (3 ): 615 - 622 .
URL
[本文引用: 2]
YAN H , HUANG J , LI R A , et al . Research on video SAR moving target detection algorithm based on improved faster region-based CNN
[J]. Journal of Electronics and Information Technology , 2021 , 43 (3 ): 615 - 622 .
URL
[本文引用: 2]
[83]
LIANG Z H, LIANG C J, ZHANG Y, et al. Tracking of moving target based on SiamMask for video SAR system[C]//Proc. of the IEEE International Conference on Signal, Information and Data Processing, 2019.
[本文引用: 1]
[84]
BAO J Y , ZHANG X L , ZHANG T W , et al . ShadowDeNet: a moving target shadow detection network for video SAR
[J]. Remote Sensing , 2022 , 14 (2 ): 320 .
[本文引用: 1]
In memory of Carl A
1
1985
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
A tutorial on synthetic aperture radar
1
2013
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
1
2005
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
1
2005
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
SAR卫星业务化地形测绘能力分析与展望
1
2021
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
Analysis and outlook of the operational topographic surveying and mapping capability of the SAR satellites
1
2021
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
自然资源遥感应用研究进展
1
2019
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
Advances in application of remote sensing to natural resources
1
2019
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
机载SAR遥感测图技术及应用
1
2019
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
Mapping technology and application of airborne SAR
1
2019
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
美军地面战场态势感知系统发展启示
1
2018
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
The development of U. S ground battlefield situational awareness system and its implications
1
2018
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
1
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
1
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
1
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
1
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
5
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
... 此外, Bishop等[10 ] 利用GPU中单精度比双精度运算更快的特性, 对BP算法中的距离公式进行了二阶Taylor展开, 并使用Taylor三阶系数估计成像误差, 提高了成像算法的计算效率[10 ] . ...
... [10 ]. ...
... 最后, 用式(13)和式(14)代替平方根, 推导出三阶项以估计相位误差.根据文献[10 ]所推导的ΔR (3) , ΔR (3) 是由常数项、线性项、二次项以及三次项组成, 根据ΔR (3) 所确定的散焦相位误差为 ...
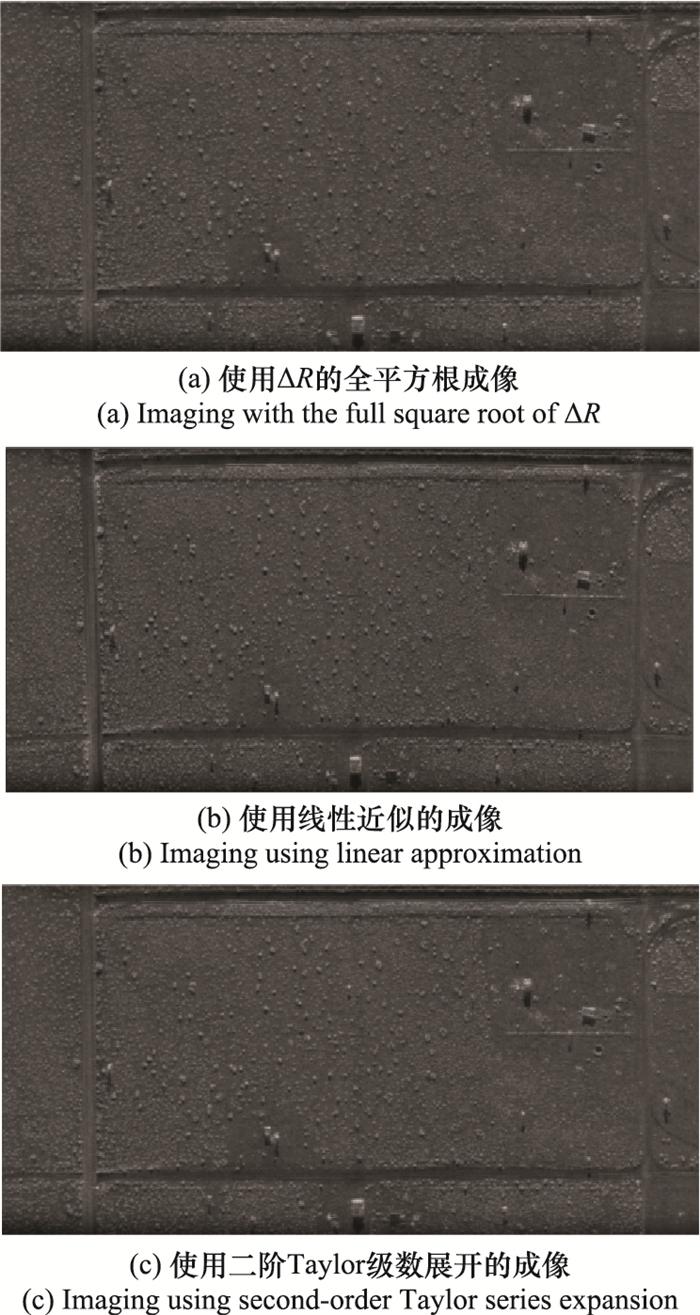
... 图 16 为文献[10 ]在ViSAR系统上使用不同方法计算的实测成像结果: ①是使用平方根计算形成的, 在图像上方的边缘所成像的道路几乎为直线; ②为ΔR 线性近似(一阶项)成像的结果, 图像上方的道路明显变得扭曲; ③为使用二阶项进行计算所成的图像, 图像上方的道路也较为笔直, 与①难以区分.这验证了在图形处理器上使用ΔR 的二阶近似能提高数据的计算效率, 并能提升在大规模场景下实时处理ViSAR数据的能力. ...
Unsupervised Image Registration for VIDEO SAR
1
2021
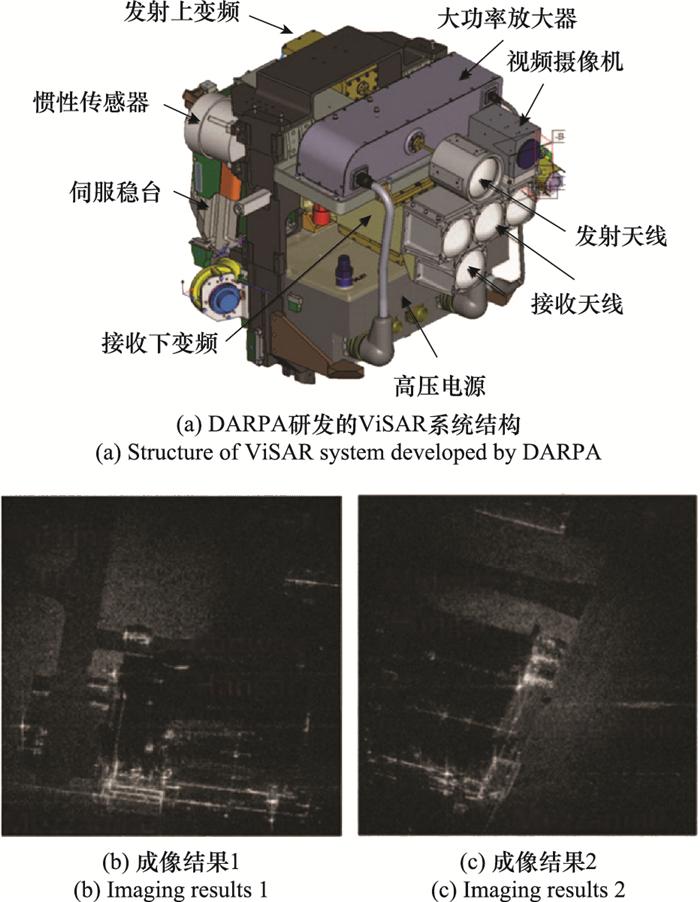
... 2012年, 美国国防部高级研究计划署(Defense Advanced Research Projects Agency, DARPA)的ViSAR项目开始实施, 该项目旨在开发出具有穿透云层及烟尘、同时具有高分辨率和高帧率的ViSAR成像系统[12 , 29 ] .在短短数年之间, DARPA联合雷神、贝宜系统有限公司等多家美国国防公司设计出了231.5~235 GHz的ViSAR系统, 并在2018年年底公布了其ViSAR系统成像的结果[34 ] . ...
1
... 加拿大国防研究及发展中心(Defence Research and Development Canada, DRDC)自2007年起开始对ViSAR进行立项, 并在2010年对其展开了大量的研究工作, 把其研究重心放在如何提高ViSAR成像的图像质量中.在文献[14 ]中, DRDC基于X波段的雷达系统, 通过孔径重叠模式来实现ViSAR成像, 并且该中心通过对相邻帧图像的累积求和来减少散斑以及填充阴影, 以达到增加后续帧图像对比度的目的. ...
1
... 20世纪50年代, 美国数学家Carl Wiley研究阿特拉斯液体洲际弹道导弹时发现如果对多普勒频移进行处理, 能改善雷达方位向的分辨率.根据这一原理, 可利用雷达的运动来合成等效长的方位向长孔径, 并获得目标区域的二维地表图像.这一思想后来被发展成合成孔径雷达(synthetic aperture radar, SAR)技术[1 ] .SAR技术具备全天候、全天时、高分辨率以及可穿透云雾等优点[2 -3 ] , 经过多年的发展, 现已作为一种主动的航天、航空遥感手段, 被广泛地应用于地形测绘[4 ] 、资源普查[5 ] 、目标侦察[6 ] 以及战场态势感知等民用或军用领域[7 ] .但传统SAR仅能获取目标成像区域的静态二维(距离和方位)平面信息, 无法得到更丰富的场景信息.因此, 研究人员通过对SAR的深入研究, 提出不同的方案,来获取更多的场景信息.其中, 干涉SAR(interferometric SAR, InSAR)可获取目标成像区域的高度信息, InSAR通过SAR复图干涉得到干涉相位,来获取目标的高度信息, 从而实现对成像区域内高程信息的检测[8 ] .极化SAR(polarimetric SAR, PolSAR)利用多种极化方式获取成像区域内多种散射信息, 使SAR图像由近似“黑白”的图像向“彩色”图像发展[9 ] .视频SAR(video SAR, ViSAR)将视频显示技术与SAR成像技术相结合, 通过对目标成像区域的凝视获取该区域的连续帧图像, 并且最终以“视频”的形式展示, 使SAR图像由“静态”向“动态”发展, 是目前SAR技术中最为前沿的课题之一[10 -15 ] . ...
1
... 美国桑迪亚国家实验室(Sandia National Laboratory, SNL)于2003年首次提出了ViSAR的概念.ViSAR可通过实时调整雷达波束来对地面目标区域进行长时间凝视, 同时对接收的回波信号进行持续成像, 来形成连续的高帧率图像, 并且将SAR技术与视频显示技术进行结合, 高效地展示出地面的变化情况, 同时利用观察者对运动目标的敏感性提升对场景动态信息的分析能力.当ViSAR的成像分辨率与帧率分别达到0.2 m和5 Hz时, 观察者能更为准确地对地面动目标进行实时检测与跟踪[16 -17 ] .作为一种新型的对地探测技术, ViSAR大致可分为两类, 一类是高频ViSAR; 另一类是非高频ViSAR.高频ViSAR技术通过提高工作频率来提高成像帧率, 其工作频段位于太赫兹频段, 最大的优势在于成像延迟和合成孔径积累时间较短, 易于实现对成像场景的持续实时监测, 并且高频ViSAR的雷达天线尺寸较小, 有利于搭载至无人机等小型平台.但由于高频ViSAR的工作频率较高, 受大气衰减影响较大, 其工作距离较短, 并且其极高的实时性也对处理算法的效率提出了一定的要求.非高频ViSAR技术采用孔径重叠模式提高成像帧率, 其最大优势在于不需要较高的工作频率, 可适用于目前大多数的SAR系统.此外, 非高频ViSAR的相关算法以及系统较为成熟, 能提供较长的工作距离.但选择使用孔径重叠模式,务必需要较长的积累时间, 造成一定的成像延时, 实时性较差, 可能无法满足对成像场景的实时监测[18 -19 ] . ...
1
... 美国桑迪亚国家实验室(Sandia National Laboratory, SNL)于2003年首次提出了ViSAR的概念.ViSAR可通过实时调整雷达波束来对地面目标区域进行长时间凝视, 同时对接收的回波信号进行持续成像, 来形成连续的高帧率图像, 并且将SAR技术与视频显示技术进行结合, 高效地展示出地面的变化情况, 同时利用观察者对运动目标的敏感性提升对场景动态信息的分析能力.当ViSAR的成像分辨率与帧率分别达到0.2 m和5 Hz时, 观察者能更为准确地对地面动目标进行实时检测与跟踪[16 -17 ] .作为一种新型的对地探测技术, ViSAR大致可分为两类, 一类是高频ViSAR; 另一类是非高频ViSAR.高频ViSAR技术通过提高工作频率来提高成像帧率, 其工作频段位于太赫兹频段, 最大的优势在于成像延迟和合成孔径积累时间较短, 易于实现对成像场景的持续实时监测, 并且高频ViSAR的雷达天线尺寸较小, 有利于搭载至无人机等小型平台.但由于高频ViSAR的工作频率较高, 受大气衰减影响较大, 其工作距离较短, 并且其极高的实时性也对处理算法的效率提出了一定的要求.非高频ViSAR技术采用孔径重叠模式提高成像帧率, 其最大优势在于不需要较高的工作频率, 可适用于目前大多数的SAR系统.此外, 非高频ViSAR的相关算法以及系统较为成熟, 能提供较长的工作距离.但选择使用孔径重叠模式,务必需要较长的积累时间, 造成一定的成像延时, 实时性较差, 可能无法满足对成像场景的实时监测[18 -19 ] . ...
1
... 美国桑迪亚国家实验室(Sandia National Laboratory, SNL)于2003年首次提出了ViSAR的概念.ViSAR可通过实时调整雷达波束来对地面目标区域进行长时间凝视, 同时对接收的回波信号进行持续成像, 来形成连续的高帧率图像, 并且将SAR技术与视频显示技术进行结合, 高效地展示出地面的变化情况, 同时利用观察者对运动目标的敏感性提升对场景动态信息的分析能力.当ViSAR的成像分辨率与帧率分别达到0.2 m和5 Hz时, 观察者能更为准确地对地面动目标进行实时检测与跟踪[16 -17 ] .作为一种新型的对地探测技术, ViSAR大致可分为两类, 一类是高频ViSAR; 另一类是非高频ViSAR.高频ViSAR技术通过提高工作频率来提高成像帧率, 其工作频段位于太赫兹频段, 最大的优势在于成像延迟和合成孔径积累时间较短, 易于实现对成像场景的持续实时监测, 并且高频ViSAR的雷达天线尺寸较小, 有利于搭载至无人机等小型平台.但由于高频ViSAR的工作频率较高, 受大气衰减影响较大, 其工作距离较短, 并且其极高的实时性也对处理算法的效率提出了一定的要求.非高频ViSAR技术采用孔径重叠模式提高成像帧率, 其最大优势在于不需要较高的工作频率, 可适用于目前大多数的SAR系统.此外, 非高频ViSAR的相关算法以及系统较为成熟, 能提供较长的工作距离.但选择使用孔径重叠模式,务必需要较长的积累时间, 造成一定的成像延时, 实时性较差, 可能无法满足对成像场景的实时监测[18 -19 ] . ...
1
... 美国桑迪亚国家实验室(Sandia National Laboratory, SNL)于2003年首次提出了ViSAR的概念.ViSAR可通过实时调整雷达波束来对地面目标区域进行长时间凝视, 同时对接收的回波信号进行持续成像, 来形成连续的高帧率图像, 并且将SAR技术与视频显示技术进行结合, 高效地展示出地面的变化情况, 同时利用观察者对运动目标的敏感性提升对场景动态信息的分析能力.当ViSAR的成像分辨率与帧率分别达到0.2 m和5 Hz时, 观察者能更为准确地对地面动目标进行实时检测与跟踪[16 -17 ] .作为一种新型的对地探测技术, ViSAR大致可分为两类, 一类是高频ViSAR; 另一类是非高频ViSAR.高频ViSAR技术通过提高工作频率来提高成像帧率, 其工作频段位于太赫兹频段, 最大的优势在于成像延迟和合成孔径积累时间较短, 易于实现对成像场景的持续实时监测, 并且高频ViSAR的雷达天线尺寸较小, 有利于搭载至无人机等小型平台.但由于高频ViSAR的工作频率较高, 受大气衰减影响较大, 其工作距离较短, 并且其极高的实时性也对处理算法的效率提出了一定的要求.非高频ViSAR技术采用孔径重叠模式提高成像帧率, 其最大优势在于不需要较高的工作频率, 可适用于目前大多数的SAR系统.此外, 非高频ViSAR的相关算法以及系统较为成熟, 能提供较长的工作距离.但选择使用孔径重叠模式,务必需要较长的积累时间, 造成一定的成像延时, 实时性较差, 可能无法满足对成像场景的实时监测[18 -19 ] . ...
Wide-area traffic monitoring with the SAR/GMTI system PAMIR
1
2008
... 美国桑迪亚国家实验室(Sandia National Laboratory, SNL)于2003年首次提出了ViSAR的概念.ViSAR可通过实时调整雷达波束来对地面目标区域进行长时间凝视, 同时对接收的回波信号进行持续成像, 来形成连续的高帧率图像, 并且将SAR技术与视频显示技术进行结合, 高效地展示出地面的变化情况, 同时利用观察者对运动目标的敏感性提升对场景动态信息的分析能力.当ViSAR的成像分辨率与帧率分别达到0.2 m和5 Hz时, 观察者能更为准确地对地面动目标进行实时检测与跟踪[16 -17 ] .作为一种新型的对地探测技术, ViSAR大致可分为两类, 一类是高频ViSAR; 另一类是非高频ViSAR.高频ViSAR技术通过提高工作频率来提高成像帧率, 其工作频段位于太赫兹频段, 最大的优势在于成像延迟和合成孔径积累时间较短, 易于实现对成像场景的持续实时监测, 并且高频ViSAR的雷达天线尺寸较小, 有利于搭载至无人机等小型平台.但由于高频ViSAR的工作频率较高, 受大气衰减影响较大, 其工作距离较短, 并且其极高的实时性也对处理算法的效率提出了一定的要求.非高频ViSAR技术采用孔径重叠模式提高成像帧率, 其最大优势在于不需要较高的工作频率, 可适用于目前大多数的SAR系统.此外, 非高频ViSAR的相关算法以及系统较为成熟, 能提供较长的工作距离.但选择使用孔径重叠模式,务必需要较长的积累时间, 造成一定的成像延时, 实时性较差, 可能无法满足对成像场景的实时监测[18 -19 ] . ...
Synthetic aperture radar interferometry
1
2000
... 图 1 为经典条带SAR成像几何的示意图, 载机以固定高度H 、飞行速度V 沿直线轨迹进行匀速飞行, P r P n [20 ] 可表示为 ...
1
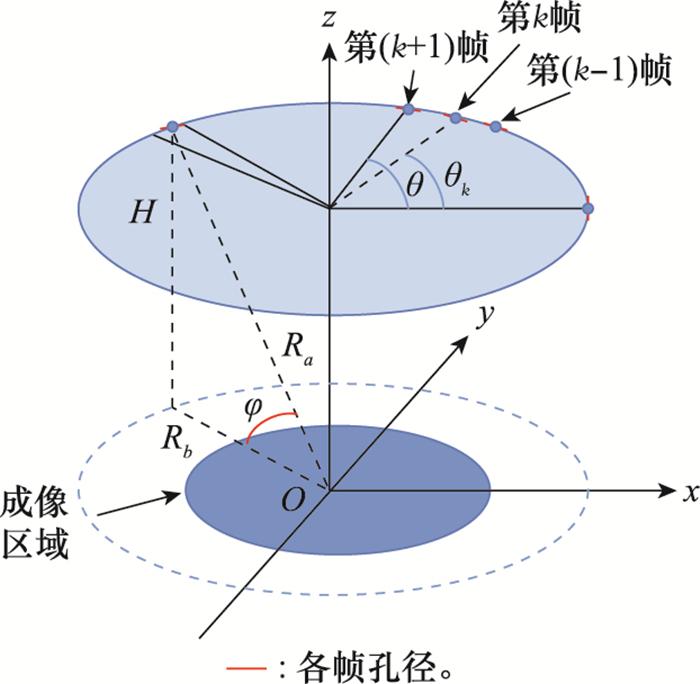
... 在ViSAR体制中, 因需要对目标成像区域进行长时间持续观测, 并要以动态的形式反映成像区域内的运动状态, ViSAR系统通常工作于聚束模式下[21 ] .在聚束模式下, 为了满足对地面目标区域的持续观测需求, 在载机平台飞行的过程中, 需实时地调整雷达波束,使其持续指向目标成像区域, 获得持续观测所需的回波信息以进行成像.当照射时间增加时, 合成孔径积累角也会对应地增大, 这样可形成更大的多普勒带宽Ba , 从而达到比条带模式距离向分辨率更高的方位向分辨率.因此, 在目前的研究中, 为了便于对帧率进行分析和对目标成像区域进行监测, ViSAR成像大都采用圆周轨迹聚束模式[22 -25 ] . ...
多平台合成孔径雷达成像算法综述
1
2019
... 在ViSAR体制中, 因需要对目标成像区域进行长时间持续观测, 并要以动态的形式反映成像区域内的运动状态, ViSAR系统通常工作于聚束模式下[21 ] .在聚束模式下, 为了满足对地面目标区域的持续观测需求, 在载机平台飞行的过程中, 需实时地调整雷达波束,使其持续指向目标成像区域, 获得持续观测所需的回波信息以进行成像.当照射时间增加时, 合成孔径积累角也会对应地增大, 这样可形成更大的多普勒带宽Ba , 从而达到比条带模式距离向分辨率更高的方位向分辨率.因此, 在目前的研究中, 为了便于对帧率进行分析和对目标成像区域进行监测, ViSAR成像大都采用圆周轨迹聚束模式[22 -25 ] . ...
A review of imaging algorithms in multi-platform-borne synthetic aperture radar
1
2019
... 在ViSAR体制中, 因需要对目标成像区域进行长时间持续观测, 并要以动态的形式反映成像区域内的运动状态, ViSAR系统通常工作于聚束模式下[21 ] .在聚束模式下, 为了满足对地面目标区域的持续观测需求, 在载机平台飞行的过程中, 需实时地调整雷达波束,使其持续指向目标成像区域, 获得持续观测所需的回波信息以进行成像.当照射时间增加时, 合成孔径积累角也会对应地增大, 这样可形成更大的多普勒带宽Ba , 从而达到比条带模式距离向分辨率更高的方位向分辨率.因此, 在目前的研究中, 为了便于对帧率进行分析和对目标成像区域进行监测, ViSAR成像大都采用圆周轨迹聚束模式[22 -25 ] . ...
A video-SAR imaging technique for aspect-dependent scattering in wide angle
0
2017
1
... 在ViSAR体制中, 因需要对目标成像区域进行长时间持续观测, 并要以动态的形式反映成像区域内的运动状态, ViSAR系统通常工作于聚束模式下[21 ] .在聚束模式下, 为了满足对地面目标区域的持续观测需求, 在载机平台飞行的过程中, 需实时地调整雷达波束,使其持续指向目标成像区域, 获得持续观测所需的回波信息以进行成像.当照射时间增加时, 合成孔径积累角也会对应地增大, 这样可形成更大的多普勒带宽Ba , 从而达到比条带模式距离向分辨率更高的方位向分辨率.因此, 在目前的研究中, 为了便于对帧率进行分析和对目标成像区域进行监测, ViSAR成像大都采用圆周轨迹聚束模式[22 -25 ] . ...
1
... 在ViSAR体制中, 因需要对目标成像区域进行长时间持续观测, 并要以动态的形式反映成像区域内的运动状态, ViSAR系统通常工作于聚束模式下[21 ] .在聚束模式下, 为了满足对地面目标区域的持续观测需求, 在载机平台飞行的过程中, 需实时地调整雷达波束,使其持续指向目标成像区域, 获得持续观测所需的回波信息以进行成像.当照射时间增加时, 合成孔径积累角也会对应地增大, 这样可形成更大的多普勒带宽Ba , 从而达到比条带模式距离向分辨率更高的方位向分辨率.因此, 在目前的研究中, 为了便于对帧率进行分析和对目标成像区域进行监测, ViSAR成像大都采用圆周轨迹聚束模式[22 -25 ] . ...
1
1999
... 图 2 为圆周轨迹聚束模式示意图, 平台以固定的高度沿圆周轨迹飞行, 同时不断地调整雷达波束的指向来保证飞行过程中成像区域始终在雷达的波束范围之内.ViSAR的距离向分辨率[26 ] 可表示为 ...
2
2012
... 同时,在聚束模式中, ViSAR的方位向分辨率[27 ] 可表示为 ...
... Linnehan等[66 ] 针对圆周轨迹聚束模式下的ViSAR系统难以聚焦的问题进行了研究, 提出通过伪点散射体方法进行相位梯度的估计, 解决了载机飞行带来的场景旋转和坐标变换的问题, 在固定方向取得了良好的聚焦效果, 并在图像被编译成SAR视频之前对其进行聚焦.该方法的第一步是对复杂图像数据进行线性相位校正, 使伪相位历史(pseudo-phase history, PPH)域中的能量以域轴为中心.频谱居中后, 将图像进行旋转, 以便将水平轴定向, 并可以应用相位梯度自聚焦(phase gradient autofocusing, PGA)成像算法.同时, 将这个图像方向指定为远距离像(far range up, FRU).接着, 使用零填充的FFT将图像转换到PPH域.然后, 使用简单的最近邻方法分别旋转插值频谱的实部和虚部, 再通过逆FFT将旋转后的数据转换回图像域, 从而不丢失PGA算法所需的相位信息.针对图像水平方向上的方位角模糊, 应用了文献[27 ]所描述的传统PGA算法.经过多次迭代后, 自动聚焦向量被充分估计, 以减轻点目标的模糊响应, 此时在PPH域可以使用双线性插值将聚焦的FRU图像幅度旋转回基本方向(cardinal direction up, CDU).这样,聚焦的SAR帧的像素将与原始的反向投影过程进行匹配, 并可以编译成一个ViSAR图像序列. ...
1
... 式中: R a T s F s ρ a V 、雷达工作频率f c R a ρ a R a V 或雷达工作频率f c f c T s T s F s T s [28 -29 ] . ...
2
... 式中: R a T s F s ρ a V 、雷达工作频率f c R a ρ a R a V 或雷达工作频率f c f c T s T s F s T s [28 -29 ] . ...
... 2012年, 美国国防部高级研究计划署(Defense Advanced Research Projects Agency, DARPA)的ViSAR项目开始实施, 该项目旨在开发出具有穿透云层及烟尘、同时具有高分辨率和高帧率的ViSAR成像系统[12 , 29 ] .在短短数年之间, DARPA联合雷神、贝宜系统有限公司等多家美国国防公司设计出了231.5~235 GHz的ViSAR系统, 并在2018年年底公布了其ViSAR系统成像的结果[34 ] . ...
2
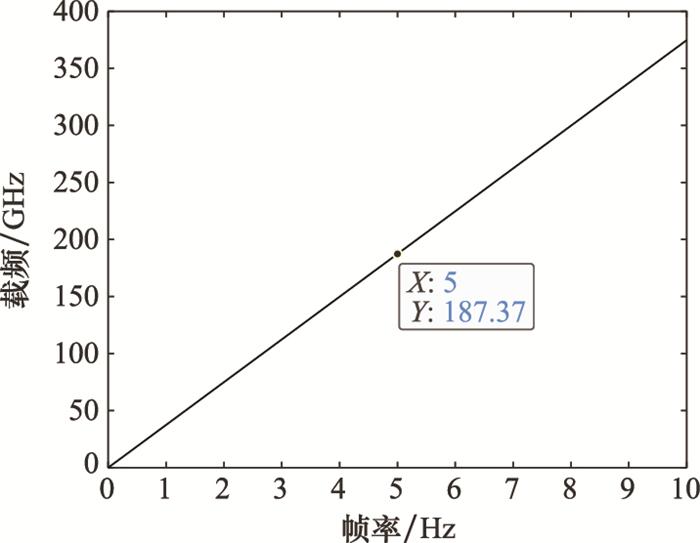
... 根据图 4 所示的不同频段下的大气衰减曲线可知, 在越高的工作频率下, 大气衰减是越大的, 但在94 GHz、220 GHz、340 GHz、580 GHz等频段内, 大气对电磁波的吸收较弱, 因此这几个频带被称为“大气窗口”[30 ] .结合图 3 的计算结果以及目前的硬件水平来看, 为了满足0.2 m的分辨率以及5 Hz的独立帧率, 高频ViSAR系统的雷达工作频率应在220 GHz以及340 GHz附近. ...
... 针对太赫兹ViSAR的运动补偿问题, 文献[30 ]提出了一种适用于高频ViSAR的运动补偿算法, 此算法可大幅减少计算复杂度, 更加符合ViSAR系统的实时性.该算法在二维重采样之后进行空变误差的补偿, 相较于其他的算法能极大地提高补偿算法的计算效率, 同时该算法可在二维重采样时与PFA算法相结合并进行成像, 进一步提高了运动补偿与成像算法的效率. ...
2
... 根据图 4 所示的不同频段下的大气衰减曲线可知, 在越高的工作频率下, 大气衰减是越大的, 但在94 GHz、220 GHz、340 GHz、580 GHz等频段内, 大气对电磁波的吸收较弱, 因此这几个频带被称为“大气窗口”[30 ] .结合图 3 的计算结果以及目前的硬件水平来看, 为了满足0.2 m的分辨率以及5 Hz的独立帧率, 高频ViSAR系统的雷达工作频率应在220 GHz以及340 GHz附近. ...
... 针对太赫兹ViSAR的运动补偿问题, 文献[30 ]提出了一种适用于高频ViSAR的运动补偿算法, 此算法可大幅减少计算复杂度, 更加符合ViSAR系统的实时性.该算法在二维重采样之后进行空变误差的补偿, 相较于其他的算法能极大地提高补偿算法的计算效率, 同时该算法可在二维重采样时与PFA算法相结合并进行成像, 进一步提高了运动补偿与成像算法的效率. ...
2
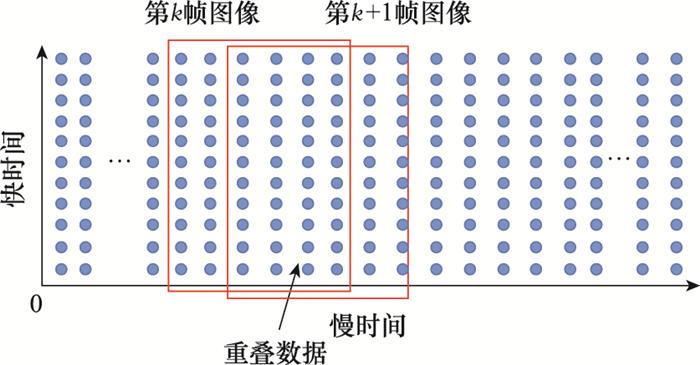
... 由式(8)可知, 在一个ViSAR系统的其他参数不变的情况下, 可以通过提高孔径重叠率γ 提高系统成像的帧率.在理论上, 雷达每接收一个脉冲均可形成一帧新的SAR图像.因此, 脉冲重复频率(pulse repetition frequency, PRF)的数值是孔径重叠模式下ViSAR可达到的最大交叠帧率的数值.另外, 采用孔径重叠模式成像还可以增加相邻帧图像之间的相干性[31 ] , 让相邻图像之间有更强的连续性, 有助于观察者的判断以及后续的处理.但是,过高的孔径重叠率γ 会导致相邻帧图像的变化较小, 造成较高的信息冗余.因此, 选择合适的孔径重叠率γ 也是非高频ViSAR系统设计中的重要一环[32 ] . ...
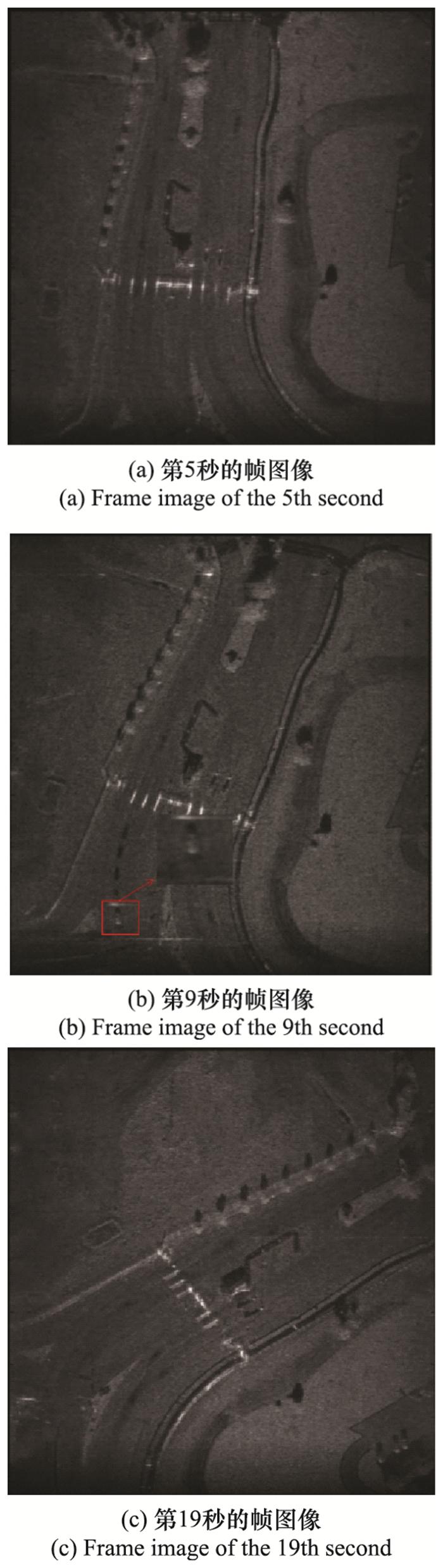
... SNL于2009年公布了其ViSAR系统的专利.在该专利中, SNL采用孔径重叠模式来进行ViSAR系统的设计与成像, 并且SNL开发了先进的ViSAR算法, 同时拥有多项ViSAR模式的专利, 实现了革命性的情报获取方式[31 ] .同时, SNL在其官网上公布了他们所研发的ViSAR系统的三段成像结果[33 ] , 图 7 为公布数据中其中一段SAR视频的截图. ...
1
... 由式(8)可知, 在一个ViSAR系统的其他参数不变的情况下, 可以通过提高孔径重叠率γ 提高系统成像的帧率.在理论上, 雷达每接收一个脉冲均可形成一帧新的SAR图像.因此, 脉冲重复频率(pulse repetition frequency, PRF)的数值是孔径重叠模式下ViSAR可达到的最大交叠帧率的数值.另外, 采用孔径重叠模式成像还可以增加相邻帧图像之间的相干性[31 ] , 让相邻图像之间有更强的连续性, 有助于观察者的判断以及后续的处理.但是,过高的孔径重叠率γ 会导致相邻帧图像的变化较小, 造成较高的信息冗余.因此, 选择合适的孔径重叠率γ 也是非高频ViSAR系统设计中的重要一环[32 ] . ...
1
... SNL于2009年公布了其ViSAR系统的专利.在该专利中, SNL采用孔径重叠模式来进行ViSAR系统的设计与成像, 并且SNL开发了先进的ViSAR算法, 同时拥有多项ViSAR模式的专利, 实现了革命性的情报获取方式[31 ] .同时, SNL在其官网上公布了他们所研发的ViSAR系统的三段成像结果[33 ] , 图 7 为公布数据中其中一段SAR视频的截图. ...
1
... 2012年, 美国国防部高级研究计划署(Defense Advanced Research Projects Agency, DARPA)的ViSAR项目开始实施, 该项目旨在开发出具有穿透云层及烟尘、同时具有高分辨率和高帧率的ViSAR成像系统[12 , 29 ] .在短短数年之间, DARPA联合雷神、贝宜系统有限公司等多家美国国防公司设计出了231.5~235 GHz的ViSAR系统, 并在2018年年底公布了其ViSAR系统成像的结果[34 ] . ...
2
... 美国通用原子航空系统公司(General Atomics Aeronautical Systems Incorporated, GA-ASI)于2013年开始对圆周轨迹聚束模式下的非高频ViSAR系统进行研究, 同时提出采用反向投影(back projection, BP)算法结合移位寄存器来实现孔径的循环位移以及成像处理, 最终的交叠帧率达到了4 Hz[35 ] . ...
... 目前, 聚束模式下的ViSAR成像算法主要有两大类: 时域成像算法以及频域成像算法.时域成像算法中最为基础的是反向投影(back projection, BP)算法[35 ] .BP算法虽成像精度高、成像处理过程简单, 但其计算量较大, 实时性较差.因此, 文献[52 ]提出了一种用于ViSAR成像的快速BP(fast BP, FBP)算法.该算法将成像场景进行划分, 分为兴趣区域(region of interest, ROI)和一般区域(general region, GR), 在不同的区域使用不同的孔径长度进行成像, 重点提升ROI的分辨率, 并通过递归思想降低ViSAR成像的计算复杂度[52 ] .图 15 为迭代FBP算法的说明. ...
1
... 德国弗劳恩霍夫(Fraunhofer-Gesellschaft, FhG)协会于2013年开展太赫兹关键器件研究, 并研制了型号为MIRANDA-300的太赫兹雷达成像系统.该系统的工作频率为300 GHz, 其分辨率达到了3.7 mm[36 ] .2016年, FhG研制出了新一代MIRANDA-300 ViSAR成像系统, 并进行了成像实验, 其雷达系统与成像结果如图 10 所示, 成像结果也很好地验证了太赫兹ViSAR系统的高分辨成像能力[37 -40 ] . ...
1
... 德国弗劳恩霍夫(Fraunhofer-Gesellschaft, FhG)协会于2013年开展太赫兹关键器件研究, 并研制了型号为MIRANDA-300的太赫兹雷达成像系统.该系统的工作频率为300 GHz, 其分辨率达到了3.7 mm[36 ] .2016年, FhG研制出了新一代MIRANDA-300 ViSAR成像系统, 并进行了成像实验, 其雷达系统与成像结果如图 10 所示, 成像结果也很好地验证了太赫兹ViSAR系统的高分辨成像能力[37 -40 ] . ...
Ultra-high resolution imaging of facades and vertical infrastructure by carborne SAR and airborne CSAR
1
2019
... 德国弗劳恩霍夫(Fraunhofer-Gesellschaft, FhG)协会于2013年开展太赫兹关键器件研究, 并研制了型号为MIRANDA-300的太赫兹雷达成像系统.该系统的工作频率为300 GHz, 其分辨率达到了3.7 mm[36 ] .2016年, FhG研制出了新一代MIRANDA-300 ViSAR成像系统, 并进行了成像实验, 其雷达系统与成像结果如图 10 所示, 成像结果也很好地验证了太赫兹ViSAR系统的高分辨成像能力[37 -40 ] . ...
Signal processing for a multiple-input, multiple-output (MIMO) video synthetic aperture radar (SAR) with beat frequency division frequency-modulated continuous wave (FMCW)
1
2017
... 2017年开始, 部分亚洲国家也开始对ViSAR进行仿真验证与研究.韩国延世大学对多输入多输出调频连续波(multiple input and multiple output frequency modulated continuous wave, MIMO-FMCW)ViSAR系统进行了研究, 并设计出了多输入多输出调频连续波ViSAR(multiple input and multiple output ViSAR, MIMO ViSAR)系统[41 ] , 达到了ViSAR体制成像帧率的要求[42 ] . ...
1
... 2017年开始, 部分亚洲国家也开始对ViSAR进行仿真验证与研究.韩国延世大学对多输入多输出调频连续波(multiple input and multiple output frequency modulated continuous wave, MIMO-FMCW)ViSAR系统进行了研究, 并设计出了多输入多输出调频连续波ViSAR(multiple input and multiple output ViSAR, MIMO ViSAR)系统[41 ] , 达到了ViSAR体制成像帧率的要求[42 ] . ...
Terahertz imaging radar with inverse aperture synthesis techniques: system structure, signal processing, and experiment results
2
2014
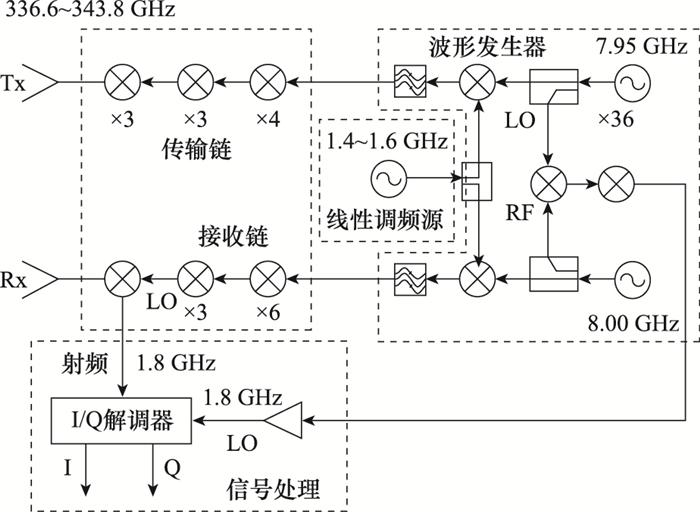
... 2014年, 文献[43 ]设计了一款雷达工作频率范围在336.6~343.8 GHz的FMCW-SAR系统, 其成像结果在方位向上可达到较高的分辨率.图 11 为FMCW-SAR系统示意图, 该系统总共由四大模块组成: 信号发生器、chirp源、收发器以及信号处理单元.该系统以340 GHz的中心频率、7.2 GHz的带宽进行FMCW模式的工作, 并且其成像结果验证了太赫兹雷达系统的成像能力.同时, 还对太赫兹雷达的三维成像技术以及太赫兹ViSAR的成像技术进行了相关研究. ...
... Research progress of domestic ViSAR
Table 3 时间/年份 文献 研究内容 研究结果 2014 文献[43 ] 研发太赫兹FMCW-SAR系统 成像结果在方位向上可达到较高的分辨率 2015 文献[44 ] 提出了星载ViSAR模式 得到了仿真的视频帧图像序列 2016 文献[45 ] 设计了基于双站模式的天基ViSAR系统 适用于较多的工作模式, 能为后续的星载ViSAR的动目标检测提供依据 2016 文献[46 ] 实现了小型化的FMCW-SAR系统, 并完成机载实验 通过对数据的处理, 实现了ViSAR成像 2016 文献[48 -49 ] ViSAR理论研究 详细分析了ViSAR模式中, 载机平台在不同速度下的成像帧率、成像分辨率与雷达工作频率的关系 2018 文献[50 ] 研发了一种220 GHz的ViSAR系统 通过成像试验可实现5 Hz的成像帧率, 3.2 cm的成像分辨率 2021 文献[51 ] ViSAR数字处理组件的研发 PCB板可完成整个ViSAR系统的控制、数据采集等功能
3 ViSAR处理技术研究进展 ViSAR的出现从某种意义上来讲就是为了更加精确地进行地面机动目标的实时监测与跟踪, 并且由于其合成孔径时间短, 有利于动目标的阴影成像, 因此基于阴影的动目标检测是ViSAR的最大应用之一.此外, 如何效率更高、更稳定地进行高帧率持续成像,以及对ViSAR系统进行运动补偿,也是ViSAR的研究重点.本节将对ViSAR的成像算法、运动补偿以及动目标检测这3个方面来详细分析ViSAR处理技术的研究现状. ...
3
... 2015年, 文献[44 ]首次提出了星载ViSAR模式.星载ViSAR系统工作于聚束模式与孔径重叠模式下, 该系统对采集到的回波数据按照90%的重叠率进行分割, 接着对所有数据进行成像处理, 最终成功地得到了连续的视频帧图像序列.一年后, 文献[45 ]在文献[44 ]星载ViSAR模式的基础上设计了基于双站模式的天基ViSAR系统, 同时详细研究了ViSAR成像性能与各参数之间的关系.该ViSAR系统采用静止轨道上的SAR卫星作为信号发射源, 利用低轨上的SAR顺序接收成像区域的回波信号, 这样能使系统具备较强的反辐射攻击能力, 同时能适用于较多的工作模式.文献[45 ]的仿真结果表明, 天基ViSAR系统可以较为正确地反映目标的运动情况, 能为后续的基于星载ViSAR的动目标检测提供重要依据. ...
... ]在文献[44 ]星载ViSAR模式的基础上设计了基于双站模式的天基ViSAR系统, 同时详细研究了ViSAR成像性能与各参数之间的关系.该ViSAR系统采用静止轨道上的SAR卫星作为信号发射源, 利用低轨上的SAR顺序接收成像区域的回波信号, 这样能使系统具备较强的反辐射攻击能力, 同时能适用于较多的工作模式.文献[45 ]的仿真结果表明, 天基ViSAR系统可以较为正确地反映目标的运动情况, 能为后续的基于星载ViSAR的动目标检测提供重要依据. ...
... Research progress of domestic ViSAR
Table 3 时间/年份 文献 研究内容 研究结果 2014 文献[43 ] 研发太赫兹FMCW-SAR系统 成像结果在方位向上可达到较高的分辨率 2015 文献[44 ] 提出了星载ViSAR模式 得到了仿真的视频帧图像序列 2016 文献[45 ] 设计了基于双站模式的天基ViSAR系统 适用于较多的工作模式, 能为后续的星载ViSAR的动目标检测提供依据 2016 文献[46 ] 实现了小型化的FMCW-SAR系统, 并完成机载实验 通过对数据的处理, 实现了ViSAR成像 2016 文献[48 -49 ] ViSAR理论研究 详细分析了ViSAR模式中, 载机平台在不同速度下的成像帧率、成像分辨率与雷达工作频率的关系 2018 文献[50 ] 研发了一种220 GHz的ViSAR系统 通过成像试验可实现5 Hz的成像帧率, 3.2 cm的成像分辨率 2021 文献[51 ] ViSAR数字处理组件的研发 PCB板可完成整个ViSAR系统的控制、数据采集等功能
3 ViSAR处理技术研究进展 ViSAR的出现从某种意义上来讲就是为了更加精确地进行地面机动目标的实时监测与跟踪, 并且由于其合成孔径时间短, 有利于动目标的阴影成像, 因此基于阴影的动目标检测是ViSAR的最大应用之一.此外, 如何效率更高、更稳定地进行高帧率持续成像,以及对ViSAR系统进行运动补偿,也是ViSAR的研究重点.本节将对ViSAR的成像算法、运动补偿以及动目标检测这3个方面来详细分析ViSAR处理技术的研究现状. ...
天基视频SAR系统设计及成像算法研究
5
2016
... 2015年, 文献[44 ]首次提出了星载ViSAR模式.星载ViSAR系统工作于聚束模式与孔径重叠模式下, 该系统对采集到的回波数据按照90%的重叠率进行分割, 接着对所有数据进行成像处理, 最终成功地得到了连续的视频帧图像序列.一年后, 文献[45 ]在文献[44 ]星载ViSAR模式的基础上设计了基于双站模式的天基ViSAR系统, 同时详细研究了ViSAR成像性能与各参数之间的关系.该ViSAR系统采用静止轨道上的SAR卫星作为信号发射源, 利用低轨上的SAR顺序接收成像区域的回波信号, 这样能使系统具备较强的反辐射攻击能力, 同时能适用于较多的工作模式.文献[45 ]的仿真结果表明, 天基ViSAR系统可以较为正确地反映目标的运动情况, 能为后续的基于星载ViSAR的动目标检测提供重要依据. ...
... ]星载ViSAR模式的基础上设计了基于双站模式的天基ViSAR系统, 同时详细研究了ViSAR成像性能与各参数之间的关系.该ViSAR系统采用静止轨道上的SAR卫星作为信号发射源, 利用低轨上的SAR顺序接收成像区域的回波信号, 这样能使系统具备较强的反辐射攻击能力, 同时能适用于较多的工作模式.文献[45 ]的仿真结果表明, 天基ViSAR系统可以较为正确地反映目标的运动情况, 能为后续的基于星载ViSAR的动目标检测提供重要依据. ...
... Research progress of domestic ViSAR
Table 3 时间/年份 文献 研究内容 研究结果 2014 文献[43 ] 研发太赫兹FMCW-SAR系统 成像结果在方位向上可达到较高的分辨率 2015 文献[44 ] 提出了星载ViSAR模式 得到了仿真的视频帧图像序列 2016 文献[45 ] 设计了基于双站模式的天基ViSAR系统 适用于较多的工作模式, 能为后续的星载ViSAR的动目标检测提供依据 2016 文献[46 ] 实现了小型化的FMCW-SAR系统, 并完成机载实验 通过对数据的处理, 实现了ViSAR成像 2016 文献[48 -49 ] ViSAR理论研究 详细分析了ViSAR模式中, 载机平台在不同速度下的成像帧率、成像分辨率与雷达工作频率的关系 2018 文献[50 ] 研发了一种220 GHz的ViSAR系统 通过成像试验可实现5 Hz的成像帧率, 3.2 cm的成像分辨率 2021 文献[51 ] ViSAR数字处理组件的研发 PCB板可完成整个ViSAR系统的控制、数据采集等功能
3 ViSAR处理技术研究进展 ViSAR的出现从某种意义上来讲就是为了更加精确地进行地面机动目标的实时监测与跟踪, 并且由于其合成孔径时间短, 有利于动目标的阴影成像, 因此基于阴影的动目标检测是ViSAR的最大应用之一.此外, 如何效率更高、更稳定地进行高帧率持续成像,以及对ViSAR系统进行运动补偿,也是ViSAR的研究重点.本节将对ViSAR的成像算法、运动补偿以及动目标检测这3个方面来详细分析ViSAR处理技术的研究现状. ...
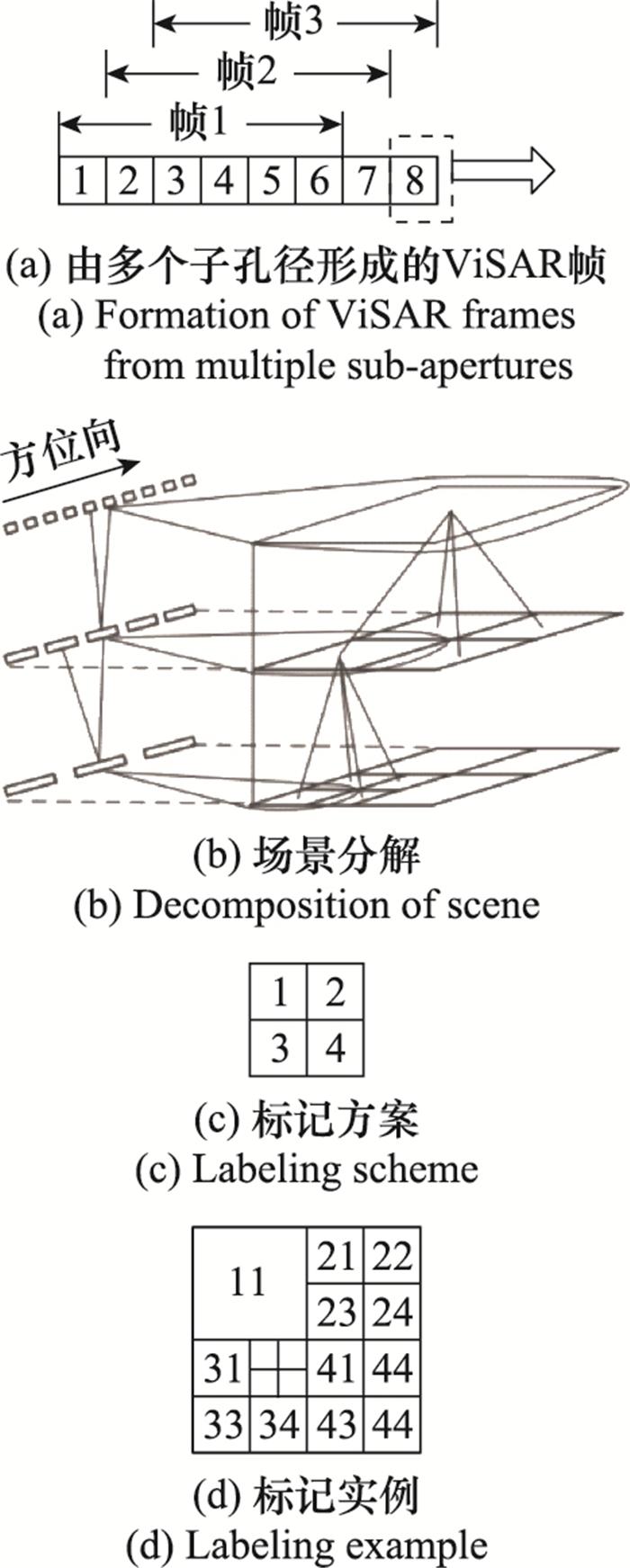
... 针对天基ViSAR系统的成像问题, 文献[45 ]提出一种大视角下重叠孔径模式的并行运算的滤波BP(filtering BP, FBP)重建算法.该算法首先将回波信号划分成若干个子孔径, 并且为了实现子孔径叠加, 帧周期需为子孔径长度的整数倍.接着, 在单个子孔径内进行距离向压缩和插值, 之后进行回波相位补偿, 最后对每个子孔径的成像进行并行计算, 得到由子孔径合成的单帧全分辨率图像[45 , 54 ] .最后由该算法得到的ViSAR成像结果正确地反映了地面目标的运动情况, 能为基于天基ViSAR的运动目标检测提供依据[55 ] . ...
... [45 , 54 ].最后由该算法得到的ViSAR成像结果正确地反映了地面目标的运动情况, 能为基于天基ViSAR的运动目标检测提供依据[55 ] . ...
Research on spaceborne video SAR system design and image formation algorithm
5
2016
... 2015年, 文献[44 ]首次提出了星载ViSAR模式.星载ViSAR系统工作于聚束模式与孔径重叠模式下, 该系统对采集到的回波数据按照90%的重叠率进行分割, 接着对所有数据进行成像处理, 最终成功地得到了连续的视频帧图像序列.一年后, 文献[45 ]在文献[44 ]星载ViSAR模式的基础上设计了基于双站模式的天基ViSAR系统, 同时详细研究了ViSAR成像性能与各参数之间的关系.该ViSAR系统采用静止轨道上的SAR卫星作为信号发射源, 利用低轨上的SAR顺序接收成像区域的回波信号, 这样能使系统具备较强的反辐射攻击能力, 同时能适用于较多的工作模式.文献[45 ]的仿真结果表明, 天基ViSAR系统可以较为正确地反映目标的运动情况, 能为后续的基于星载ViSAR的动目标检测提供重要依据. ...
... ]星载ViSAR模式的基础上设计了基于双站模式的天基ViSAR系统, 同时详细研究了ViSAR成像性能与各参数之间的关系.该ViSAR系统采用静止轨道上的SAR卫星作为信号发射源, 利用低轨上的SAR顺序接收成像区域的回波信号, 这样能使系统具备较强的反辐射攻击能力, 同时能适用于较多的工作模式.文献[45 ]的仿真结果表明, 天基ViSAR系统可以较为正确地反映目标的运动情况, 能为后续的基于星载ViSAR的动目标检测提供重要依据. ...
... Research progress of domestic ViSAR
Table 3 时间/年份 文献 研究内容 研究结果 2014 文献[43 ] 研发太赫兹FMCW-SAR系统 成像结果在方位向上可达到较高的分辨率 2015 文献[44 ] 提出了星载ViSAR模式 得到了仿真的视频帧图像序列 2016 文献[45 ] 设计了基于双站模式的天基ViSAR系统 适用于较多的工作模式, 能为后续的星载ViSAR的动目标检测提供依据 2016 文献[46 ] 实现了小型化的FMCW-SAR系统, 并完成机载实验 通过对数据的处理, 实现了ViSAR成像 2016 文献[48 -49 ] ViSAR理论研究 详细分析了ViSAR模式中, 载机平台在不同速度下的成像帧率、成像分辨率与雷达工作频率的关系 2018 文献[50 ] 研发了一种220 GHz的ViSAR系统 通过成像试验可实现5 Hz的成像帧率, 3.2 cm的成像分辨率 2021 文献[51 ] ViSAR数字处理组件的研发 PCB板可完成整个ViSAR系统的控制、数据采集等功能
3 ViSAR处理技术研究进展 ViSAR的出现从某种意义上来讲就是为了更加精确地进行地面机动目标的实时监测与跟踪, 并且由于其合成孔径时间短, 有利于动目标的阴影成像, 因此基于阴影的动目标检测是ViSAR的最大应用之一.此外, 如何效率更高、更稳定地进行高帧率持续成像,以及对ViSAR系统进行运动补偿,也是ViSAR的研究重点.本节将对ViSAR的成像算法、运动补偿以及动目标检测这3个方面来详细分析ViSAR处理技术的研究现状. ...
... 针对天基ViSAR系统的成像问题, 文献[45 ]提出一种大视角下重叠孔径模式的并行运算的滤波BP(filtering BP, FBP)重建算法.该算法首先将回波信号划分成若干个子孔径, 并且为了实现子孔径叠加, 帧周期需为子孔径长度的整数倍.接着, 在单个子孔径内进行距离向压缩和插值, 之后进行回波相位补偿, 最后对每个子孔径的成像进行并行计算, 得到由子孔径合成的单帧全分辨率图像[45 , 54 ] .最后由该算法得到的ViSAR成像结果正确地反映了地面目标的运动情况, 能为基于天基ViSAR的运动目标检测提供依据[55 ] . ...
... [45 , 54 ].最后由该算法得到的ViSAR成像结果正确地反映了地面目标的运动情况, 能为基于天基ViSAR的运动目标检测提供依据[55 ] . ...
2
... 2016年, 文献[46 ]通过合理地设计和对紧凑器件的应用, 成功地设计了机载FMCW-SAR系统.基于该高性能的FMCW-SAR系统, 通过对原始数据进行预处理、扩展有限状态自动机(finite state automata, FSA)并行实现以及对图像数据的再处理, 实现了ViSAR成像.在FMCW-SAR系统的处理上还进行了准确的耗时测试, 并进行了多次机载实验, 获得了最终的FMCW-SAR视频成像结果.图 12(a) 为FMCW-SAR系统的处理板, 在FMCW-SAR视频的处理过程中, FPGA读取存储卡中的原始数据, 并将回波数据传输到用作数据缓冲区的DDR3sdram中.在对帧数据进行缓冲后, 数字信号处理芯片通过扩展的FSA处理相应的原始数据.处理后的图像数据通过网络传输到计算机上.最后, 在计算机上显示相应的帧图像.下一帧的数据也以同样的方式进行处理和传输.图 12(b) 为FMCW-SAR系统处理后的ViSAR成像结果, 其成像场景为800 m×3 000 m的城镇.从成像结果中可明显看出,成像区域道路清晰而连续, 同时建筑结构比较集中, 耕地面积不同的农田也比较容易区分[47 ] . ...
... Research progress of domestic ViSAR
Table 3 时间/年份 文献 研究内容 研究结果 2014 文献[43 ] 研发太赫兹FMCW-SAR系统 成像结果在方位向上可达到较高的分辨率 2015 文献[44 ] 提出了星载ViSAR模式 得到了仿真的视频帧图像序列 2016 文献[45 ] 设计了基于双站模式的天基ViSAR系统 适用于较多的工作模式, 能为后续的星载ViSAR的动目标检测提供依据 2016 文献[46 ] 实现了小型化的FMCW-SAR系统, 并完成机载实验 通过对数据的处理, 实现了ViSAR成像 2016 文献[48 -49 ] ViSAR理论研究 详细分析了ViSAR模式中, 载机平台在不同速度下的成像帧率、成像分辨率与雷达工作频率的关系 2018 文献[50 ] 研发了一种220 GHz的ViSAR系统 通过成像试验可实现5 Hz的成像帧率, 3.2 cm的成像分辨率 2021 文献[51 ] ViSAR数字处理组件的研发 PCB板可完成整个ViSAR系统的控制、数据采集等功能
3 ViSAR处理技术研究进展 ViSAR的出现从某种意义上来讲就是为了更加精确地进行地面机动目标的实时监测与跟踪, 并且由于其合成孔径时间短, 有利于动目标的阴影成像, 因此基于阴影的动目标检测是ViSAR的最大应用之一.此外, 如何效率更高、更稳定地进行高帧率持续成像,以及对ViSAR系统进行运动补偿,也是ViSAR的研究重点.本节将对ViSAR的成像算法、运动补偿以及动目标检测这3个方面来详细分析ViSAR处理技术的研究现状. ...
1
... 2016年, 文献[46 ]通过合理地设计和对紧凑器件的应用, 成功地设计了机载FMCW-SAR系统.基于该高性能的FMCW-SAR系统, 通过对原始数据进行预处理、扩展有限状态自动机(finite state automata, FSA)并行实现以及对图像数据的再处理, 实现了ViSAR成像.在FMCW-SAR系统的处理上还进行了准确的耗时测试, 并进行了多次机载实验, 获得了最终的FMCW-SAR视频成像结果.图 12(a) 为FMCW-SAR系统的处理板, 在FMCW-SAR视频的处理过程中, FPGA读取存储卡中的原始数据, 并将回波数据传输到用作数据缓冲区的DDR3sdram中.在对帧数据进行缓冲后, 数字信号处理芯片通过扩展的FSA处理相应的原始数据.处理后的图像数据通过网络传输到计算机上.最后, 在计算机上显示相应的帧图像.下一帧的数据也以同样的方式进行处理和传输.图 12(b) 为FMCW-SAR系统处理后的ViSAR成像结果, 其成像场景为800 m×3 000 m的城镇.从成像结果中可明显看出,成像区域道路清晰而连续, 同时建筑结构比较集中, 耕地面积不同的农田也比较容易区分[47 ] . ...
条带式VideoSAR参数依赖关系的推导及应用
2
2016
... 文献[48 -49 ]分别在2016年详细分析了条带式高频ViSAR与孔径重叠模式ViSAR在不同平台速度下的成像帧率、成像分辨率与雷达工作频率的关系, 为后续开发ViSAR系统的参数设计提供了一定参考. ...
... Research progress of domestic ViSAR
Table 3 时间/年份 文献 研究内容 研究结果 2014 文献[43 ] 研发太赫兹FMCW-SAR系统 成像结果在方位向上可达到较高的分辨率 2015 文献[44 ] 提出了星载ViSAR模式 得到了仿真的视频帧图像序列 2016 文献[45 ] 设计了基于双站模式的天基ViSAR系统 适用于较多的工作模式, 能为后续的星载ViSAR的动目标检测提供依据 2016 文献[46 ] 实现了小型化的FMCW-SAR系统, 并完成机载实验 通过对数据的处理, 实现了ViSAR成像 2016 文献[48 -49 ] ViSAR理论研究 详细分析了ViSAR模式中, 载机平台在不同速度下的成像帧率、成像分辨率与雷达工作频率的关系 2018 文献[50 ] 研发了一种220 GHz的ViSAR系统 通过成像试验可实现5 Hz的成像帧率, 3.2 cm的成像分辨率 2021 文献[51 ] ViSAR数字处理组件的研发 PCB板可完成整个ViSAR系统的控制、数据采集等功能
3 ViSAR处理技术研究进展 ViSAR的出现从某种意义上来讲就是为了更加精确地进行地面机动目标的实时监测与跟踪, 并且由于其合成孔径时间短, 有利于动目标的阴影成像, 因此基于阴影的动目标检测是ViSAR的最大应用之一.此外, 如何效率更高、更稳定地进行高帧率持续成像,以及对ViSAR系统进行运动补偿,也是ViSAR的研究重点.本节将对ViSAR的成像算法、运动补偿以及动目标检测这3个方面来详细分析ViSAR处理技术的研究现状. ...
Derivation and application of stripmap VideoSAR parameter relations
2
2016
... 文献[48 -49 ]分别在2016年详细分析了条带式高频ViSAR与孔径重叠模式ViSAR在不同平台速度下的成像帧率、成像分辨率与雷达工作频率的关系, 为后续开发ViSAR系统的参数设计提供了一定参考. ...
... Research progress of domestic ViSAR
Table 3 时间/年份 文献 研究内容 研究结果 2014 文献[43 ] 研发太赫兹FMCW-SAR系统 成像结果在方位向上可达到较高的分辨率 2015 文献[44 ] 提出了星载ViSAR模式 得到了仿真的视频帧图像序列 2016 文献[45 ] 设计了基于双站模式的天基ViSAR系统 适用于较多的工作模式, 能为后续的星载ViSAR的动目标检测提供依据 2016 文献[46 ] 实现了小型化的FMCW-SAR系统, 并完成机载实验 通过对数据的处理, 实现了ViSAR成像 2016 文献[48 -49 ] ViSAR理论研究 详细分析了ViSAR模式中, 载机平台在不同速度下的成像帧率、成像分辨率与雷达工作频率的关系 2018 文献[50 ] 研发了一种220 GHz的ViSAR系统 通过成像试验可实现5 Hz的成像帧率, 3.2 cm的成像分辨率 2021 文献[51 ] ViSAR数字处理组件的研发 PCB板可完成整个ViSAR系统的控制、数据采集等功能
3 ViSAR处理技术研究进展 ViSAR的出现从某种意义上来讲就是为了更加精确地进行地面机动目标的实时监测与跟踪, 并且由于其合成孔径时间短, 有利于动目标的阴影成像, 因此基于阴影的动目标检测是ViSAR的最大应用之一.此外, 如何效率更高、更稳定地进行高帧率持续成像,以及对ViSAR系统进行运动补偿,也是ViSAR的研究重点.本节将对ViSAR的成像算法、运动补偿以及动目标检测这3个方面来详细分析ViSAR处理技术的研究现状. ...
2
... 文献[48 -49 ]分别在2016年详细分析了条带式高频ViSAR与孔径重叠模式ViSAR在不同平台速度下的成像帧率、成像分辨率与雷达工作频率的关系, 为后续开发ViSAR系统的参数设计提供了一定参考. ...
... Research progress of domestic ViSAR
Table 3 时间/年份 文献 研究内容 研究结果 2014 文献[43 ] 研发太赫兹FMCW-SAR系统 成像结果在方位向上可达到较高的分辨率 2015 文献[44 ] 提出了星载ViSAR模式 得到了仿真的视频帧图像序列 2016 文献[45 ] 设计了基于双站模式的天基ViSAR系统 适用于较多的工作模式, 能为后续的星载ViSAR的动目标检测提供依据 2016 文献[46 ] 实现了小型化的FMCW-SAR系统, 并完成机载实验 通过对数据的处理, 实现了ViSAR成像 2016 文献[48 -49 ] ViSAR理论研究 详细分析了ViSAR模式中, 载机平台在不同速度下的成像帧率、成像分辨率与雷达工作频率的关系 2018 文献[50 ] 研发了一种220 GHz的ViSAR系统 通过成像试验可实现5 Hz的成像帧率, 3.2 cm的成像分辨率 2021 文献[51 ] ViSAR数字处理组件的研发 PCB板可完成整个ViSAR系统的控制、数据采集等功能
3 ViSAR处理技术研究进展 ViSAR的出现从某种意义上来讲就是为了更加精确地进行地面机动目标的实时监测与跟踪, 并且由于其合成孔径时间短, 有利于动目标的阴影成像, 因此基于阴影的动目标检测是ViSAR的最大应用之一.此外, 如何效率更高、更稳定地进行高帧率持续成像,以及对ViSAR系统进行运动补偿,也是ViSAR的研究重点.本节将对ViSAR的成像算法、运动补偿以及动目标检测这3个方面来详细分析ViSAR处理技术的研究现状. ...
一种220 GHz波段太赫兹合成孔径成像雷达
5
2018
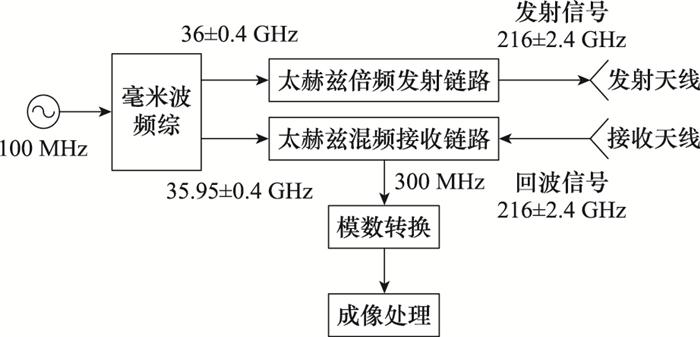
... 2018年, 文献[50 ]设计了一种220 GHz的ViSAR系统, 该系统采用一发一收的天线布局,发射信号为线性调频连续波信号.该系统可达到最大为4.8 GHz的信号带宽, 信号的输出功率约为20 mW, 并可通过成像试验实现5 Hz的独立帧率, 成像分辨率约为3.2 cm.图 13 为该ViSAR系统的示意框图[50 ] . ...
... [50 ]. ...
... 文献[
50 ]所提高频ViSAR系统框图
Diagram of high-frequency ViSAR system in <sup>[<xref ref-type="bibr" rid="b50">50</xref>]</sup> Fig.13 ![]()
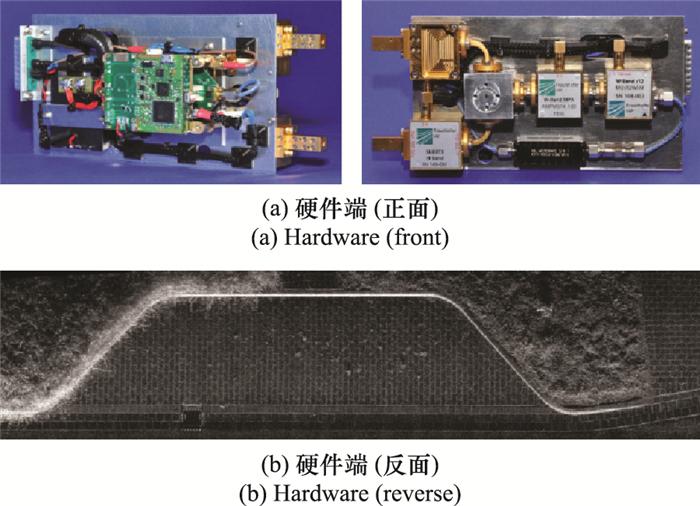
2021年, 文献[51 ]根据ViSAR系统的技术指标分析报告计算出了ViSAR系统中数字处理器件各个模块的主要参数, 并依据参数设计出了ViSAR数字处理组件的PCB板.图 14 为所设计的ViSAR数字处理组件的实物图.通过测试, 该系统可以实现2路SAR信号的产生、4路中频信号的采集和数据预处理, 并且可以与多个外置模块(如惯导、伺服和频综等)协同完成整个合成ViSAR系统的控制、数据采集和状态监控等功能[51 ] . ...
... [
50 ]
Fig.13 ![]()
2021年, 文献[51 ]根据ViSAR系统的技术指标分析报告计算出了ViSAR系统中数字处理器件各个模块的主要参数, 并依据参数设计出了ViSAR数字处理组件的PCB板.图 14 为所设计的ViSAR数字处理组件的实物图.通过测试, 该系统可以实现2路SAR信号的产生、4路中频信号的采集和数据预处理, 并且可以与多个外置模块(如惯导、伺服和频综等)协同完成整个合成ViSAR系统的控制、数据采集和状态监控等功能[51 ] . ...
... Research progress of domestic ViSAR
Table 3 时间/年份 文献 研究内容 研究结果 2014 文献[43 ] 研发太赫兹FMCW-SAR系统 成像结果在方位向上可达到较高的分辨率 2015 文献[44 ] 提出了星载ViSAR模式 得到了仿真的视频帧图像序列 2016 文献[45 ] 设计了基于双站模式的天基ViSAR系统 适用于较多的工作模式, 能为后续的星载ViSAR的动目标检测提供依据 2016 文献[46 ] 实现了小型化的FMCW-SAR系统, 并完成机载实验 通过对数据的处理, 实现了ViSAR成像 2016 文献[48 -49 ] ViSAR理论研究 详细分析了ViSAR模式中, 载机平台在不同速度下的成像帧率、成像分辨率与雷达工作频率的关系 2018 文献[50 ] 研发了一种220 GHz的ViSAR系统 通过成像试验可实现5 Hz的成像帧率, 3.2 cm的成像分辨率 2021 文献[51 ] ViSAR数字处理组件的研发 PCB板可完成整个ViSAR系统的控制、数据采集等功能
3 ViSAR处理技术研究进展 ViSAR的出现从某种意义上来讲就是为了更加精确地进行地面机动目标的实时监测与跟踪, 并且由于其合成孔径时间短, 有利于动目标的阴影成像, 因此基于阴影的动目标检测是ViSAR的最大应用之一.此外, 如何效率更高、更稳定地进行高帧率持续成像,以及对ViSAR系统进行运动补偿,也是ViSAR的研究重点.本节将对ViSAR的成像算法、运动补偿以及动目标检测这3个方面来详细分析ViSAR处理技术的研究现状. ...
Terahertz synthetic aperture imaging radar based on 220 GHz band
5
2018
... 2018年, 文献[50 ]设计了一种220 GHz的ViSAR系统, 该系统采用一发一收的天线布局,发射信号为线性调频连续波信号.该系统可达到最大为4.8 GHz的信号带宽, 信号的输出功率约为20 mW, 并可通过成像试验实现5 Hz的独立帧率, 成像分辨率约为3.2 cm.图 13 为该ViSAR系统的示意框图[50 ] . ...
... [50 ]. ...
... 文献[
50 ]所提高频ViSAR系统框图
Diagram of high-frequency ViSAR system in <sup>[<xref ref-type="bibr" rid="b50">50</xref>]</sup> Fig.13 ![]()
2021年, 文献[51 ]根据ViSAR系统的技术指标分析报告计算出了ViSAR系统中数字处理器件各个模块的主要参数, 并依据参数设计出了ViSAR数字处理组件的PCB板.图 14 为所设计的ViSAR数字处理组件的实物图.通过测试, 该系统可以实现2路SAR信号的产生、4路中频信号的采集和数据预处理, 并且可以与多个外置模块(如惯导、伺服和频综等)协同完成整个合成ViSAR系统的控制、数据采集和状态监控等功能[51 ] . ...
... [
50 ]
Fig.13 ![]()
2021年, 文献[51 ]根据ViSAR系统的技术指标分析报告计算出了ViSAR系统中数字处理器件各个模块的主要参数, 并依据参数设计出了ViSAR数字处理组件的PCB板.图 14 为所设计的ViSAR数字处理组件的实物图.通过测试, 该系统可以实现2路SAR信号的产生、4路中频信号的采集和数据预处理, 并且可以与多个外置模块(如惯导、伺服和频综等)协同完成整个合成ViSAR系统的控制、数据采集和状态监控等功能[51 ] . ...
... Research progress of domestic ViSAR
Table 3 时间/年份 文献 研究内容 研究结果 2014 文献[43 ] 研发太赫兹FMCW-SAR系统 成像结果在方位向上可达到较高的分辨率 2015 文献[44 ] 提出了星载ViSAR模式 得到了仿真的视频帧图像序列 2016 文献[45 ] 设计了基于双站模式的天基ViSAR系统 适用于较多的工作模式, 能为后续的星载ViSAR的动目标检测提供依据 2016 文献[46 ] 实现了小型化的FMCW-SAR系统, 并完成机载实验 通过对数据的处理, 实现了ViSAR成像 2016 文献[48 -49 ] ViSAR理论研究 详细分析了ViSAR模式中, 载机平台在不同速度下的成像帧率、成像分辨率与雷达工作频率的关系 2018 文献[50 ] 研发了一种220 GHz的ViSAR系统 通过成像试验可实现5 Hz的成像帧率, 3.2 cm的成像分辨率 2021 文献[51 ] ViSAR数字处理组件的研发 PCB板可完成整个ViSAR系统的控制、数据采集等功能
3 ViSAR处理技术研究进展 ViSAR的出现从某种意义上来讲就是为了更加精确地进行地面机动目标的实时监测与跟踪, 并且由于其合成孔径时间短, 有利于动目标的阴影成像, 因此基于阴影的动目标检测是ViSAR的最大应用之一.此外, 如何效率更高、更稳定地进行高帧率持续成像,以及对ViSAR系统进行运动补偿,也是ViSAR的研究重点.本节将对ViSAR的成像算法、运动补偿以及动目标检测这3个方面来详细分析ViSAR处理技术的研究现状. ...
3
... 2021年, 文献[51 ]根据ViSAR系统的技术指标分析报告计算出了ViSAR系统中数字处理器件各个模块的主要参数, 并依据参数设计出了ViSAR数字处理组件的PCB板.图 14 为所设计的ViSAR数字处理组件的实物图.通过测试, 该系统可以实现2路SAR信号的产生、4路中频信号的采集和数据预处理, 并且可以与多个外置模块(如惯导、伺服和频综等)协同完成整个合成ViSAR系统的控制、数据采集和状态监控等功能[51 ] . ...
... [51 ]. ...
... Research progress of domestic ViSAR
Table 3 时间/年份 文献 研究内容 研究结果 2014 文献[43 ] 研发太赫兹FMCW-SAR系统 成像结果在方位向上可达到较高的分辨率 2015 文献[44 ] 提出了星载ViSAR模式 得到了仿真的视频帧图像序列 2016 文献[45 ] 设计了基于双站模式的天基ViSAR系统 适用于较多的工作模式, 能为后续的星载ViSAR的动目标检测提供依据 2016 文献[46 ] 实现了小型化的FMCW-SAR系统, 并完成机载实验 通过对数据的处理, 实现了ViSAR成像 2016 文献[48 -49 ] ViSAR理论研究 详细分析了ViSAR模式中, 载机平台在不同速度下的成像帧率、成像分辨率与雷达工作频率的关系 2018 文献[50 ] 研发了一种220 GHz的ViSAR系统 通过成像试验可实现5 Hz的成像帧率, 3.2 cm的成像分辨率 2021 文献[51 ] ViSAR数字处理组件的研发 PCB板可完成整个ViSAR系统的控制、数据采集等功能
3 ViSAR处理技术研究进展 ViSAR的出现从某种意义上来讲就是为了更加精确地进行地面机动目标的实时监测与跟踪, 并且由于其合成孔径时间短, 有利于动目标的阴影成像, 因此基于阴影的动目标检测是ViSAR的最大应用之一.此外, 如何效率更高、更稳定地进行高帧率持续成像,以及对ViSAR系统进行运动补偿,也是ViSAR的研究重点.本节将对ViSAR的成像算法、运动补偿以及动目标检测这3个方面来详细分析ViSAR处理技术的研究现状. ...
3
... 2021年, 文献[51 ]根据ViSAR系统的技术指标分析报告计算出了ViSAR系统中数字处理器件各个模块的主要参数, 并依据参数设计出了ViSAR数字处理组件的PCB板.图 14 为所设计的ViSAR数字处理组件的实物图.通过测试, 该系统可以实现2路SAR信号的产生、4路中频信号的采集和数据预处理, 并且可以与多个外置模块(如惯导、伺服和频综等)协同完成整个合成ViSAR系统的控制、数据采集和状态监控等功能[51 ] . ...
... [51 ]. ...
... Research progress of domestic ViSAR
Table 3 时间/年份 文献 研究内容 研究结果 2014 文献[43 ] 研发太赫兹FMCW-SAR系统 成像结果在方位向上可达到较高的分辨率 2015 文献[44 ] 提出了星载ViSAR模式 得到了仿真的视频帧图像序列 2016 文献[45 ] 设计了基于双站模式的天基ViSAR系统 适用于较多的工作模式, 能为后续的星载ViSAR的动目标检测提供依据 2016 文献[46 ] 实现了小型化的FMCW-SAR系统, 并完成机载实验 通过对数据的处理, 实现了ViSAR成像 2016 文献[48 -49 ] ViSAR理论研究 详细分析了ViSAR模式中, 载机平台在不同速度下的成像帧率、成像分辨率与雷达工作频率的关系 2018 文献[50 ] 研发了一种220 GHz的ViSAR系统 通过成像试验可实现5 Hz的成像帧率, 3.2 cm的成像分辨率 2021 文献[51 ] ViSAR数字处理组件的研发 PCB板可完成整个ViSAR系统的控制、数据采集等功能
3 ViSAR处理技术研究进展 ViSAR的出现从某种意义上来讲就是为了更加精确地进行地面机动目标的实时监测与跟踪, 并且由于其合成孔径时间短, 有利于动目标的阴影成像, 因此基于阴影的动目标检测是ViSAR的最大应用之一.此外, 如何效率更高、更稳定地进行高帧率持续成像,以及对ViSAR系统进行运动补偿,也是ViSAR的研究重点.本节将对ViSAR的成像算法、运动补偿以及动目标检测这3个方面来详细分析ViSAR处理技术的研究现状. ...
Processing video-SAR data with the fast back projection method
2
2016
... 目前, 聚束模式下的ViSAR成像算法主要有两大类: 时域成像算法以及频域成像算法.时域成像算法中最为基础的是反向投影(back projection, BP)算法[35 ] .BP算法虽成像精度高、成像处理过程简单, 但其计算量较大, 实时性较差.因此, 文献[52 ]提出了一种用于ViSAR成像的快速BP(fast BP, FBP)算法.该算法将成像场景进行划分, 分为兴趣区域(region of interest, ROI)和一般区域(general region, GR), 在不同的区域使用不同的孔径长度进行成像, 重点提升ROI的分辨率, 并通过递归思想降低ViSAR成像的计算复杂度[52 ] .图 15 为迭代FBP算法的说明. ...
... [52 ].图 15 为迭代FBP算法的说明. ...
Taylor expansion of the differential range for monostatic SAR
1
2005
... 根据文献[53 ]的推导, 差分范围ΔR 相对于点(x , y , z )=(0, 0, 0)的Taylor展开式为 ...
An autoregressive formulation for SAR back projection imaging
1
2011
... 针对天基ViSAR系统的成像问题, 文献[45 ]提出一种大视角下重叠孔径模式的并行运算的滤波BP(filtering BP, FBP)重建算法.该算法首先将回波信号划分成若干个子孔径, 并且为了实现子孔径叠加, 帧周期需为子孔径长度的整数倍.接着, 在单个子孔径内进行距离向压缩和插值, 之后进行回波相位补偿, 最后对每个子孔径的成像进行并行计算, 得到由子孔径合成的单帧全分辨率图像[45 , 54 ] .最后由该算法得到的ViSAR成像结果正确地反映了地面目标的运动情况, 能为基于天基ViSAR的运动目标检测提供依据[55 ] . ...
GEO-LEO双站视频SAR系统若干问题研究
1
2017
... 针对天基ViSAR系统的成像问题, 文献[45 ]提出一种大视角下重叠孔径模式的并行运算的滤波BP(filtering BP, FBP)重建算法.该算法首先将回波信号划分成若干个子孔径, 并且为了实现子孔径叠加, 帧周期需为子孔径长度的整数倍.接着, 在单个子孔径内进行距离向压缩和插值, 之后进行回波相位补偿, 最后对每个子孔径的成像进行并行计算, 得到由子孔径合成的单帧全分辨率图像[45 , 54 ] .最后由该算法得到的ViSAR成像结果正确地反映了地面目标的运动情况, 能为基于天基ViSAR的运动目标检测提供依据[55 ] . ...
A study on key technologies of spaceborne video SAR system based on GEO-LEO bistatic model
1
2017
... 针对天基ViSAR系统的成像问题, 文献[45 ]提出一种大视角下重叠孔径模式的并行运算的滤波BP(filtering BP, FBP)重建算法.该算法首先将回波信号划分成若干个子孔径, 并且为了实现子孔径叠加, 帧周期需为子孔径长度的整数倍.接着, 在单个子孔径内进行距离向压缩和插值, 之后进行回波相位补偿, 最后对每个子孔径的成像进行并行计算, 得到由子孔径合成的单帧全分辨率图像[45 , 54 ] .最后由该算法得到的ViSAR成像结果正确地反映了地面目标的运动情况, 能为基于天基ViSAR的运动目标检测提供依据[55 ] . ...
1
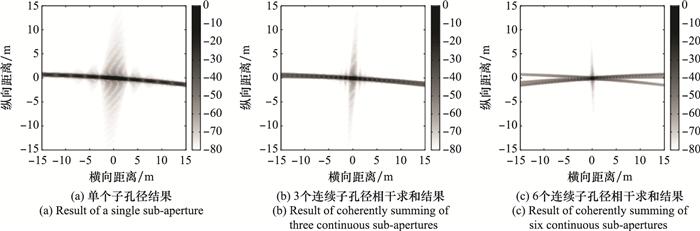
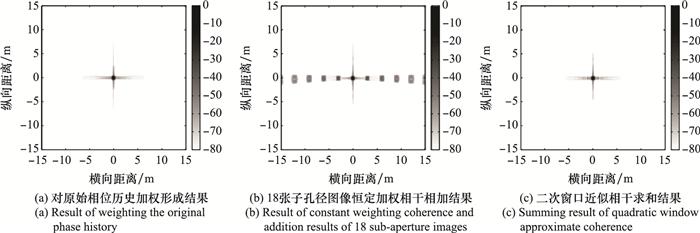
... 但上述的成像结果会有主瓣展宽、旁瓣较高的问题.因此, Hawley等[56 ] 利用ViSAR相邻帧数据的重叠特性, 提出通过对子孔径图像进行叠加成像来进行旁瓣抑制的算法.在孔径重叠模式中, 生成ViSAR连续帧图像时会存在历史相位重叠的问题, 造成一定的重复处理.Hawley等先使用BP算法从不重叠的子孔径中形成过采样的SAR图像, 在得到子孔径图像之后再相干地求和产生全分辨率的图像, 这样可以控制旁瓣的窗口.在图像求和时对子孔径进行加权, 可以为每个子孔径产生两个或更多的加权图像, 这些图像可以通过线性组合来近似任何期望的孔径加权.在该方法中, 实现了与相位历史数据加权几乎相同的旁瓣控制, 并为每一帧形成一个新的图像, 节省了计算成本.图 17 和图 18 分别为连续子孔径相干求和、BP成像与加权亚孔径组合方法成像的比较结果.从两图的对比可以看出, 图 17 中的连续子孔径相干求和的结果有着明显的交叉范围伪影.图 18(a) 为对原始相位历史进行加权并使用BP算法来形成使用整个加权相位历史的图像的结果, 图 18(b) 为18个子孔径图像相干求和的结果, 由图可以清楚地看到周期性的旁瓣伪影, 图 18(c) 为二次窗口近似进行相干求和的结果, 该方法使用方位角上6个子孔径中的每一个子孔径的3个加权子孔径图像.除了峰值响应的两侧都有一个小的旁瓣伪影之外, 很难与图 18(a) 进行区分. ...
Range-Doppler imaging of rotating objects
1
1980
... 极坐标格式算法(polar format algorithm, PFA)是ViSAR频域成像算法中最有代表性的一种, 由SNL实验室的Walker提出[57 ] .频域算法基于二维匹配滤波的原理, 通过对回波信号的快速傅里叶变换(fast Fourier transform, FFT), 将其转化为频域内的复振幅和相位信息, 再通过相位补偿、插值等处理方法, 实现快速成像.PFA则利用平面波假设原理, 将信号在波数域内的分布近似为简单的极坐标分布, 再使其频谱信号重采样为直角分布, 通过二维FFT得到最终的SAR图像.同时,PFA更适用于聚束模式的SAR成像[58 ] . ...
Range resampling in the polar format algorithm for spotlight SAR image formation using the Chirp-Z-transform
1
2007
... 极坐标格式算法(polar format algorithm, PFA)是ViSAR频域成像算法中最有代表性的一种, 由SNL实验室的Walker提出[57 ] .频域算法基于二维匹配滤波的原理, 通过对回波信号的快速傅里叶变换(fast Fourier transform, FFT), 将其转化为频域内的复振幅和相位信息, 再通过相位补偿、插值等处理方法, 实现快速成像.PFA则利用平面波假设原理, 将信号在波数域内的分布近似为简单的极坐标分布, 再使其频谱信号重采样为直角分布, 通过二维FFT得到最终的SAR图像.同时,PFA更适用于聚束模式的SAR成像[58 ] . ...
1
... 美国SNL的Doerry等[59 ] 提出了一种基于一维Chirp-Z变换的极坐标实时成像算法, 该算法先通过硬件改变系统的采样率和采样时间, 避免插值运算, 实现实时的运动补偿,之后采用Chirp-Z变换对补偿后的信号进行成像处理, 这样进一步提高了成像算法的效率, 并且适用于高速运动场景. ...
3
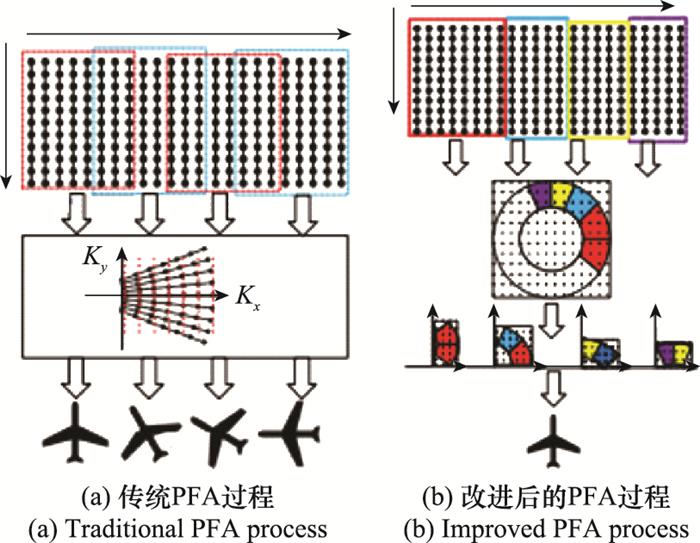
... 在此研究的基础上, 2017年, Zuo等[60 ] 通过自主设计的太赫兹调频连续波SAR(frequency modulated continuous wave SAR, FMCW-SAR)系统采集了实验数据, 并提出了一种基于PFA的ViSAR成像算法, 验证了太赫兹ViSAR的高帧率成像能力[60 ] .文献[60 ]在传统PFA成像算法中的笛卡尔坐标系中预定义了一个二维谱矩阵, 然后通过对极坐标系中分布的子孔径的二维谱进行插值运算, 可以将其填充到预定义的矩阵中, 即可计算出子孔径二维谱的最小封闭矩形.最后, 对基于最小封闭矩形的预定义矩阵得到的二维谱进行二维FFT, 得到笛卡尔坐标系上固定方向的ViSAR帧图像, 这样就可避免重复的插值计算.图 19 为该算法的过程示意图. ...
... [60 ].文献[60 ]在传统PFA成像算法中的笛卡尔坐标系中预定义了一个二维谱矩阵, 然后通过对极坐标系中分布的子孔径的二维谱进行插值运算, 可以将其填充到预定义的矩阵中, 即可计算出子孔径二维谱的最小封闭矩形.最后, 对基于最小封闭矩形的预定义矩阵得到的二维谱进行二维FFT, 得到笛卡尔坐标系上固定方向的ViSAR帧图像, 这样就可避免重复的插值计算.图 19 为该算法的过程示意图. ...
... .文献[60 ]在传统PFA成像算法中的笛卡尔坐标系中预定义了一个二维谱矩阵, 然后通过对极坐标系中分布的子孔径的二维谱进行插值运算, 可以将其填充到预定义的矩阵中, 即可计算出子孔径二维谱的最小封闭矩形.最后, 对基于最小封闭矩形的预定义矩阵得到的二维谱进行二维FFT, 得到笛卡尔坐标系上固定方向的ViSAR帧图像, 这样就可避免重复的插值计算.图 19 为该算法的过程示意图. ...
Interpolation-free algorithm for persistent multi-frame imaging of video-SAR
1
2017
... 频域成像算法中的图像插值运算会导致成像的效率不高, 因此文献[61 ]提出了一种仅需二维FFT、无需图像插值就能实现的ViSAR成像算法.该成像算法的流程为: ①对回波信号进行距离向预处理(去调频与去斜处理); ②根据分辨率匹配的条件, 计算分辨率匹配角以及对应的帧孔径角,并以此计算最长共同子序列(longest common subsequence, LCS)下的帧波数谱分布, 同时生成插值索引表和权值系数表; ③按孔径重叠率和帧孔径角划分合适的帧孔径数据, 并依据插值表得到LCS下的帧波数谱; ④对帧波数谱进行二维线性Chirp-Z变换(two-dimensional Chirp-Z transform, 2D-CZT), 得到单帧的地面输出坐标系(ground output coordinate system, GOCS)图像; ⑤对下一帧数据重复上述步骤, 得到连续帧图像.传统与改进后ViSAR成像的PFA过程如图 19 所示. ...
1
... Jiang等[62 ] 针对PFA算法中的二维插值影响计算速度这一缺点, 提出了一种基于Chirp Scaling的太赫兹ViSAR成像算法.该算法利用了太赫兹ViSAR的合成小角特性和线性调频的固有特性, 采用两步Chirp Scaling算法代替PFA中的二维插值, 以获得类似的聚焦效果, 成像效率更高. ...
ORTP: a video SAR imaging algorithm based on low-tubal-rank tensor recovery
1
2022
... 英国伦敦大学的Pu等[63 ] 为了减少ViSAR的采样量, 将图像处理表述为一个低Tubal-Rank张量恢复问题.该文献所提出的算法是对矩阵感知问题中正交矩阵追踪算法的一种改进, 能够有效重建目标张量, 而不需要任何关于预先指定或预先估计的张量秩值的先验信息.为此, 该算法需先迭代估计目标张量的基张量和权值张量, 利用线性映射观测张量与估计张量之间的残差,并将残差作为停止条件.最终, 证明了该算法在采样效率方面优于现有的ViSAR成像算法.从联合采样和计算效率的角度来看, 与其他低秩张量恢复算法相比, 该算法是最佳的选择, 并从理论上证明了所提方法的收敛性和正确性. ...
1
... 在实际的成像实验中, 由于载机平台时常会受到大气环境等因素的影响, 雷达APC总会偏离理想位置[64 ] .其次, 由于ViSAR的工作频率较高, 微小的载机平台位置误差也会引起较大的相位误差, 必须考虑ViSAR系统的运动补偿[65 ] .本节对已经公开的ViSAR运动补偿文献进行分析及总结. ...
The analysis and realization of motion compensation for circular synthetic aperture radar data
1
2016
... 在实际的成像实验中, 由于载机平台时常会受到大气环境等因素的影响, 雷达APC总会偏离理想位置[64 ] .其次, 由于ViSAR的工作频率较高, 微小的载机平台位置误差也会引起较大的相位误差, 必须考虑ViSAR系统的运动补偿[65 ] .本节对已经公开的ViSAR运动补偿文献进行分析及总结. ...
1
... Linnehan等[66 ] 针对圆周轨迹聚束模式下的ViSAR系统难以聚焦的问题进行了研究, 提出通过伪点散射体方法进行相位梯度的估计, 解决了载机飞行带来的场景旋转和坐标变换的问题, 在固定方向取得了良好的聚焦效果, 并在图像被编译成SAR视频之前对其进行聚焦.该方法的第一步是对复杂图像数据进行线性相位校正, 使伪相位历史(pseudo-phase history, PPH)域中的能量以域轴为中心.频谱居中后, 将图像进行旋转, 以便将水平轴定向, 并可以应用相位梯度自聚焦(phase gradient autofocusing, PGA)成像算法.同时, 将这个图像方向指定为远距离像(far range up, FRU).接着, 使用零填充的FFT将图像转换到PPH域.然后, 使用简单的最近邻方法分别旋转插值频谱的实部和虚部, 再通过逆FFT将旋转后的数据转换回图像域, 从而不丢失PGA算法所需的相位信息.针对图像水平方向上的方位角模糊, 应用了文献[27 ]所描述的传统PGA算法.经过多次迭代后, 自动聚焦向量被充分估计, 以减轻点目标的模糊响应, 此时在PPH域可以使用双线性插值将聚焦的FRU图像幅度旋转回基本方向(cardinal direction up, CDU).这样,聚焦的SAR帧的像素将与原始的反向投影过程进行匹配, 并可以编译成一个ViSAR图像序列. ...
大斜视直升机载太赫兹ViSAR振动补偿成像算法
1
2016
... 针对大斜视情况下的高频ViSAR振动补偿问题, 文献[67 ]提出了一种适用于斜视模式的振动相位误差补偿成像算法.该算法首先在时域中校正信号的大距离徒动, 之后再在频域中校正因多普勒Keystone变换引起的距离徒动, 从而实现对因载机平台振动引起的相位误差的运动补偿.该算法能在斜视角为30°时对成像场景进行运动补偿, 并且成像质量较好. ...
High squint helicopter-borne terahertz ViSAR vibration compensation imaging algorithm
1
2016
... 针对大斜视情况下的高频ViSAR振动补偿问题, 文献[67 ]提出了一种适用于斜视模式的振动相位误差补偿成像算法.该算法首先在时域中校正信号的大距离徒动, 之后再在频域中校正因多普勒Keystone变换引起的距离徒动, 从而实现对因载机平台振动引起的相位误差的运动补偿.该算法能在斜视角为30°时对成像场景进行运动补偿, 并且成像质量较好. ...
视频合成孔径雷达振动误差分析及补偿方案研究
1
2015
... 文献[68 ]分析了因载机平台引起的ViSAR振动的误差阈值与振动频率的关系, 并提出了针对ViSAR平台的高频振动的补偿方案.为了减少高频微小振动的影响, 该方案采用了隔振技术, 通过在振动源和其他元器件之间的振动传输通道上加装弹性元件以减少振动的影响.接下来, 利用平台上的多种传感器来测量载机平台的各种运动数据, 计算出平台的运动误差并进行粗补偿.最后, 基于回波数据,采用PGA算法进行精补偿, 完成对相位误差的估计和补偿, 同时从复图像域出发, 将散焦的图像聚焦和加窗, 完成对相位梯度的估计与补偿.该方案能以较高精度实现ViSAR的运动补偿,同时能隔绝大部分的高频振动.仿真和实际实验验证了该补偿方案的有效性. ...
Vibration error analysis and motion compensation of video synthetic aperture radar
1
2015
... 文献[68 ]分析了因载机平台引起的ViSAR振动的误差阈值与振动频率的关系, 并提出了针对ViSAR平台的高频振动的补偿方案.为了减少高频微小振动的影响, 该方案采用了隔振技术, 通过在振动源和其他元器件之间的振动传输通道上加装弹性元件以减少振动的影响.接下来, 利用平台上的多种传感器来测量载机平台的各种运动数据, 计算出平台的运动误差并进行粗补偿.最后, 基于回波数据,采用PGA算法进行精补偿, 完成对相位误差的估计和补偿, 同时从复图像域出发, 将散焦的图像聚焦和加窗, 完成对相位梯度的估计与补偿.该方案能以较高精度实现ViSAR的运动补偿,同时能隔绝大部分的高频振动.仿真和实际实验验证了该补偿方案的有效性. ...
Ground moving target tracking and refocusing using shadow in video-SAR
2
2020
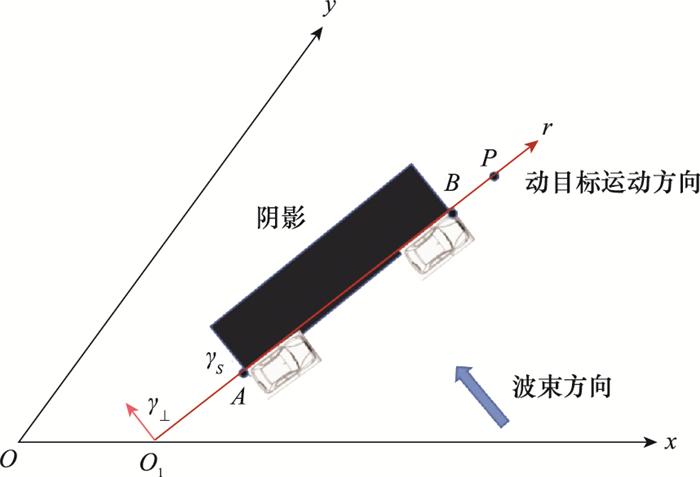
... 此外, 文献[69 ]研究了一种ViSAR地面移动目标聚焦的框架, 可提供更为清晰的动目标阴影.该框架首先使用BP成像算法获取SAR视频, 然后使用基于深度学习跟踪器跟踪多个移动目标的阴影, 并最终通过所提出的移动目标BP(moving target BP, mt-BP)算法对移动目标进行重新聚焦.在该框架下, 该算法可以对多个移动目标进行综合检测、跟踪、成像, 大大提高了ViSAR系统的动目标检测能力[69 ] . ...
... [69 ]. ...
1
... Jahangir[70 ] 提出了一种将动目标阴影作为背景分布中的异常值来进行动目标跟踪的新颖方法, 该方法在较弱的动目标阴影成像中的检测结果非常优异.经过实际验证, 该方法可在最远10 km的距离内通过阴影探测到移动的目标. ...
1
... 美国SNL实验室的Raynal等[71 ] 详细地分析了ViSAR的静态目标以及动目标阴影形成的过程, 同时从数学角度提供了ViSAR的任意运动的非特定目标的阴影尺寸和强度的理论公式.此外, 也利用中值滤波算法对SAR视频中的相干斑噪声进行空间滤波,以提高阴影杂波比, 并且给出了滤波后计算检测概率和虚警概率的公式[72 ] . ...
1
... 美国SNL实验室的Raynal等[71 ] 详细地分析了ViSAR的静态目标以及动目标阴影形成的过程, 同时从数学角度提供了ViSAR的任意运动的非特定目标的阴影尺寸和强度的理论公式.此外, 也利用中值滤波算法对SAR视频中的相干斑噪声进行空间滤波,以提高阴影杂波比, 并且给出了滤波后计算检测概率和虚警概率的公式[72 ] . ...
一种稳健的视频SAR动目标阴影检测与跟踪处理方法
1
2022
... 文献[73 ]基于美国SNL实验室公布的ViSAR数据提出了一种低虚警率的ViSAR动目标检测与跟踪方法.该方法利用了ViSAR图像序列的空间与时间的特征, 通过图像序列的数据匹配与相干斑滤波进行ViSAR图像序列的预处理, 再利用背景差分以及对称差分进行动目标阴影的检测处理与跟踪, 同时利用图像序列的空间域信息抑制虚警率, 实现ViSAR的动目标检测与跟踪, 最终利用该方法成功检测动目标的正确率达到了85%. ...
A robust moving target shadow detection and tracking method for VideoSAR
1
2022
... 文献[73 ]基于美国SNL实验室公布的ViSAR数据提出了一种低虚警率的ViSAR动目标检测与跟踪方法.该方法利用了ViSAR图像序列的空间与时间的特征, 通过图像序列的数据匹配与相干斑滤波进行ViSAR图像序列的预处理, 再利用背景差分以及对称差分进行动目标阴影的检测处理与跟踪, 同时利用图像序列的空间域信息抑制虚警率, 实现ViSAR的动目标检测与跟踪, 最终利用该方法成功检测动目标的正确率达到了85%. ...
1
... 文献[74 ]采用孔径重叠模式生成了TerraSAR-X星载SAR收录的荷兰某地的ViSAR帧图像,并以此作为数据集, 针对星载ViSAR提出了一种ViSAR动目标恒虚警率(constant false alarm rate, CFAR)检测方法.该方法首先对ViSAR每帧的回波数据进行成像、几何校正与图像匹配等预处理, 再利用生成的参考图像计算ViSAR帧图像的单帧变化因子, 根据每帧的变化因子确定单帧检测的虚警概率与检测门限.紧接着,对每一帧图像进行检测, 同时根据潜在运动目标的速度、运动时间、图像分辨率等确定检测门限, 得到最后的运动目标检测结果.在一定的条件下, 检测概率可达90%以上. ...
1
... 文献[74 ]采用孔径重叠模式生成了TerraSAR-X星载SAR收录的荷兰某地的ViSAR帧图像,并以此作为数据集, 针对星载ViSAR提出了一种ViSAR动目标恒虚警率(constant false alarm rate, CFAR)检测方法.该方法首先对ViSAR每帧的回波数据进行成像、几何校正与图像匹配等预处理, 再利用生成的参考图像计算ViSAR帧图像的单帧变化因子, 根据每帧的变化因子确定单帧检测的虚警概率与检测门限.紧接着,对每一帧图像进行检测, 同时根据潜在运动目标的速度、运动时间、图像分辨率等确定检测门限, 得到最后的运动目标检测结果.在一定的条件下, 检测概率可达90%以上. ...
Preliminary research of low-RCS moving target detection based on Ka-band video SAR
1
2017
... 为了对低RCS的动目标进行检测, 文献[75 ]提出了一种新的低RCS动目标检测方法, 并将其成功应用到了K波段的ViSAR系统中.该方法首先对ViSAR图像序列进行非相干平均以减少散斑噪声, 接着对图像序列进行集合校正与图像配准, 然后选择一组相邻的图像计算一个表示静态场景的参考图像, 之后将目标区域的每个SAR图像与参考图像分割成比例图像, 抑制图像的静态部分, 突出正在发生变化的部分.最后, 采用CFAR检测方法对动目标阴影进行检测.为了提高对噪声和剩余杂波的鲁棒性, 该方法还采用了聚类算法, 将可疑目标分成唯一的聚类, 并删除了那些与动目标阴影不匹配的聚类, 提高了动目标检测的精度. ...
基于图像序列的VideoSAR动目标检测方法
1
2016
... 文献[76 ]利用动目标阴影在ViSAR图像序列中的强相关性, 提出了一种利用背景补偿和背景分割来进行动目标检测的方法.该方法将美国Sandia实验室的ViSAR数据作为数据集, 先对每帧图像进行尺度不变特征变换(scale-invariant feature transform, SIFT), 并利用随机抽样一致性(random sample consensus, RANSAC)算法进行背景补偿, 之后再采用CattePM(Perona-Malik, PM)扩散模型抑制相干斑噪声.最后,通过灰度熵提取出动目标的阴影, 获得仅包含阴影的二值图像, 对相邻帧图像背景建模并进行差分, 结合三帧间差分法分离出多个动目标阴影, 实现多目标的运动检测.该算法最终的精度达到85.6%.文献[77 ]通过建立ViSAR仿真模型, 分析了动目标的回波特性, 并采用图像统计技术, 成功地检测出每帧SAR图像中的运动目标. ...
An approach to detect moving target in VideoSAR imagery sequence
1
2016
... 文献[76 ]利用动目标阴影在ViSAR图像序列中的强相关性, 提出了一种利用背景补偿和背景分割来进行动目标检测的方法.该方法将美国Sandia实验室的ViSAR数据作为数据集, 先对每帧图像进行尺度不变特征变换(scale-invariant feature transform, SIFT), 并利用随机抽样一致性(random sample consensus, RANSAC)算法进行背景补偿, 之后再采用CattePM(Perona-Malik, PM)扩散模型抑制相干斑噪声.最后,通过灰度熵提取出动目标的阴影, 获得仅包含阴影的二值图像, 对相邻帧图像背景建模并进行差分, 结合三帧间差分法分离出多个动目标阴影, 实现多目标的运动检测.该算法最终的精度达到85.6%.文献[77 ]通过建立ViSAR仿真模型, 分析了动目标的回波特性, 并采用图像统计技术, 成功地检测出每帧SAR图像中的运动目标. ...
1
... 文献[76 ]利用动目标阴影在ViSAR图像序列中的强相关性, 提出了一种利用背景补偿和背景分割来进行动目标检测的方法.该方法将美国Sandia实验室的ViSAR数据作为数据集, 先对每帧图像进行尺度不变特征变换(scale-invariant feature transform, SIFT), 并利用随机抽样一致性(random sample consensus, RANSAC)算法进行背景补偿, 之后再采用CattePM(Perona-Malik, PM)扩散模型抑制相干斑噪声.最后,通过灰度熵提取出动目标的阴影, 获得仅包含阴影的二值图像, 对相邻帧图像背景建模并进行差分, 结合三帧间差分法分离出多个动目标阴影, 实现多目标的运动检测.该算法最终的精度达到85.6%.文献[77 ]通过建立ViSAR仿真模型, 分析了动目标的回波特性, 并采用图像统计技术, 成功地检测出每帧SAR图像中的运动目标. ...
Video SAR moving target tracking using joint kernelized correlation filter
1
2022
... 文献[78 ]针对目标运动时产生的模糊阴影的问题, 提出了一种基于关节角化相关滤波器(joint kernelized correlation filter, JKCF)的运动目标跟踪框架.该框架基于JKCF的特征训练, 将ViSAR图像序列中的阴影与相应的距离-多普勒谱中的能量相结合, 对目标进行跟踪.针对跟踪漂移和塌陷的问题, 采用交互处理方法, 基于置信度评估, 增强目标定位和特征更新.通过融合初始化和特征更新策略, 可以显著提高跟踪的成功率和精度. ...
1
... 上述的传统目标检测方法较易受到图像中复杂背景的干扰, 并且有人工提取特征的主观性.因此, 国内外较多的研究人员将深度学习的方法应用到ViSAR的动目标检测中.文献[79 ]首次提出了一种基于卷积神经网络(convolution neural network, CNN)的阴影检测与跟踪的动目标检测方法, 该方法基于SAR图像中动目标的阴影特征, 对一系列从时间和空间子孔径SAR图像中提取出的潜在候选动目标进行CNN跟踪分类.通过对该算法的仿真实验和性能分析, 验证了该算法的有效性. ...
视频SAR成像与动目标阴影检测技术
2
2020
... 文献[80 ]借助美国Sandia实验室的ViSAR数据, 提出了一种基于滑窗密度聚类、双向长短期记忆(bi-long short term memory, Bi-LSTM)网络与快速区域CNN(faster region-based CNN, Faster R-CNN)相结合的方法,对动目标阴影进行检测.该方法利用滑动密度聚类算法和Bi-LSTM网络减少漏警, 并用Faster R-CNN进行动目标阴影的追踪.表 4 为基于实测数据的检测性能对比, 可以看出文献[80 ]所提方法具有较优秀的性能, 能实现ViSAR动目标检测与追踪.文献[81 ]基于动目标的能量和阴影的双域(信号域与图像域)联合检测思想, 分别通过Faster R-CNN和航迹关联两种技术实现了ViSAR动目标检测与跟踪, 给出了机载实测数据处理结果, 并进行了详细分析[81 ] . ...
... 为基于实测数据的检测性能对比, 可以看出文献[80 ]所提方法具有较优秀的性能, 能实现ViSAR动目标检测与追踪.文献[81 ]基于动目标的能量和阴影的双域(信号域与图像域)联合检测思想, 分别通过Faster R-CNN和航迹关联两种技术实现了ViSAR动目标检测与跟踪, 给出了机载实测数据处理结果, 并进行了详细分析[81 ] . ...
Focusing algorithms and moving target detection based on video SAR
2
2020
... 文献[80 ]借助美国Sandia实验室的ViSAR数据, 提出了一种基于滑窗密度聚类、双向长短期记忆(bi-long short term memory, Bi-LSTM)网络与快速区域CNN(faster region-based CNN, Faster R-CNN)相结合的方法,对动目标阴影进行检测.该方法利用滑动密度聚类算法和Bi-LSTM网络减少漏警, 并用Faster R-CNN进行动目标阴影的追踪.表 4 为基于实测数据的检测性能对比, 可以看出文献[80 ]所提方法具有较优秀的性能, 能实现ViSAR动目标检测与追踪.文献[81 ]基于动目标的能量和阴影的双域(信号域与图像域)联合检测思想, 分别通过Faster R-CNN和航迹关联两种技术实现了ViSAR动目标检测与跟踪, 给出了机载实测数据处理结果, 并进行了详细分析[81 ] . ...
... 为基于实测数据的检测性能对比, 可以看出文献[80 ]所提方法具有较优秀的性能, 能实现ViSAR动目标检测与追踪.文献[81 ]基于动目标的能量和阴影的双域(信号域与图像域)联合检测思想, 分别通过Faster R-CNN和航迹关联两种技术实现了ViSAR动目标检测与跟踪, 给出了机载实测数据处理结果, 并进行了详细分析[81 ] . ...
视频合成孔径雷达双域联合运动目标检测方法
2
2022
... 文献[80 ]借助美国Sandia实验室的ViSAR数据, 提出了一种基于滑窗密度聚类、双向长短期记忆(bi-long short term memory, Bi-LSTM)网络与快速区域CNN(faster region-based CNN, Faster R-CNN)相结合的方法,对动目标阴影进行检测.该方法利用滑动密度聚类算法和Bi-LSTM网络减少漏警, 并用Faster R-CNN进行动目标阴影的追踪.表 4 为基于实测数据的检测性能对比, 可以看出文献[80 ]所提方法具有较优秀的性能, 能实现ViSAR动目标检测与追踪.文献[81 ]基于动目标的能量和阴影的双域(信号域与图像域)联合检测思想, 分别通过Faster R-CNN和航迹关联两种技术实现了ViSAR动目标检测与跟踪, 给出了机载实测数据处理结果, 并进行了详细分析[81 ] . ...
... [81 ]. ...
Joint detection of moving target in video synthetic aperture radar
2
2022
... 文献[80 ]借助美国Sandia实验室的ViSAR数据, 提出了一种基于滑窗密度聚类、双向长短期记忆(bi-long short term memory, Bi-LSTM)网络与快速区域CNN(faster region-based CNN, Faster R-CNN)相结合的方法,对动目标阴影进行检测.该方法利用滑动密度聚类算法和Bi-LSTM网络减少漏警, 并用Faster R-CNN进行动目标阴影的追踪.表 4 为基于实测数据的检测性能对比, 可以看出文献[80 ]所提方法具有较优秀的性能, 能实现ViSAR动目标检测与追踪.文献[81 ]基于动目标的能量和阴影的双域(信号域与图像域)联合检测思想, 分别通过Faster R-CNN和航迹关联两种技术实现了ViSAR动目标检测与跟踪, 给出了机载实测数据处理结果, 并进行了详细分析[81 ] . ...
... [81 ]. ...
基于改进快速区域卷积神经网络的视频SAR运动目标检测算法研究
2
2021
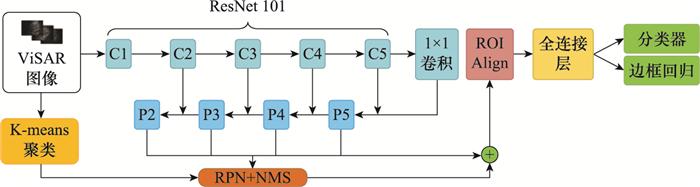
... 针对ViSAR动目标阴影特征不明显、配准难度大与虚警概率高等问题, 文献[82 ]提出一种基于改进的Faster R-CNN的ViSAR动目标检测方法, 并通过其课题组自制的Mini-SAR系统获取的实测ViSAR数据验证了该方法的有效性.该方法在Faster R-CNN的最后一层(卷积池化层)引入特征金字塔结构, 以提高对ViSAR图像特征的利用.接着, 使用K-means聚类方法对ViSAR图像序列进行预处理, 得到一组合理的ancho box设置数值, 这能有效地提高该算法针对ViSAR运动目标的检测率.图 20 所示为文献[82 ]提出的改进的Faster R-CNN算法的流程图, 最终的检测结果的正确率达到了87.2%,漏检率为12.8%. ...
... 所示为文献[82 ]提出的改进的Faster R-CNN算法的流程图, 最终的检测结果的正确率达到了87.2%,漏检率为12.8%. ...
Research on video SAR moving target detection algorithm based on improved faster region-based CNN
2
2021
... 针对ViSAR动目标阴影特征不明显、配准难度大与虚警概率高等问题, 文献[82 ]提出一种基于改进的Faster R-CNN的ViSAR动目标检测方法, 并通过其课题组自制的Mini-SAR系统获取的实测ViSAR数据验证了该方法的有效性.该方法在Faster R-CNN的最后一层(卷积池化层)引入特征金字塔结构, 以提高对ViSAR图像特征的利用.接着, 使用K-means聚类方法对ViSAR图像序列进行预处理, 得到一组合理的ancho box设置数值, 这能有效地提高该算法针对ViSAR运动目标的检测率.图 20 所示为文献[82 ]提出的改进的Faster R-CNN算法的流程图, 最终的检测结果的正确率达到了87.2%,漏检率为12.8%. ...
... 所示为文献[82 ]提出的改进的Faster R-CNN算法的流程图, 最终的检测结果的正确率达到了87.2%,漏检率为12.8%. ...
1
... 此外, 文献[83 ]将CVPR2019中精度最高的算法“SiamMask”应用于ViSAR图像的动目标跟踪.实验结果表明, SiamMask算法在处理测试数据方面的性能优于其他传统算法.同时,由于动目标的阴影不会散焦或移位, SiamMask算法同时可以用于动目标的跟踪. ...
ShadowDeNet: a moving target shadow detection network for video SAR
1
2022
... 文献[84 ]提出了一种新的深度学习网络“ShadowDeNet”来对ViSAR进行动目标阴影检测.该网络利用了5种主要的框架来保证其优越的检测性能: ①直方图均衡阴影增强(histogram equalization shadow enhancement, HESE)用于增强阴影显著性, 便于特征提取; ② Transformer自注意机制(transformer self-attention mechanism, TSAM)用于聚焦感兴趣区域, 抑制杂波干扰; ③形状变形自适应学习(shape deformation adaptive learning, SDAL)用于学习移动变形目标阴影以克服运动速度变化; ④语义引导的自适应学习(semantic guided anchor-adaptive learning, SGAAL)用于优化阴影的位置和形状; ⑤在线硬挖掘(online hard-example mining, OHEM)用于选择典型的困难负样本以提高背景识别能力.同时, 进行了广泛的消融实验, 以确认上述每个模块的有效性.实验结果表明, 与其他5种方法(Faster R-CNN、特征金字塔网络(feature pyramid network, FPN)、YOLO(you only look once, YoLO)v3、RetinaNet、CenterNet)相比, Sha-dowDeNet具有最先进的性能, 并且ShadowDeNet只是在一个可接受的范围内牺牲了检测速度. ...








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}