Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (9): 2903-2913.doi: 10.12305/j.issn.1001-506X.2022.09.25
• Guidance, Navigation and Control • Previous Articles Next Articles
Inertial-frame-based transfer alignment using Rodriguez parameters
Geng XU*, Yongxu HE, Yonggang ZHANG
- College of Intelligent Systems Science and Engineering, Harbin Engineering University, Harbin 150001, China
-
Received:2021-09-29Online:2022-09-01Published:2022-09-09 -
Contact:Geng XU
CLC Number:
Cite this article
Geng XU, Yongxu HE, Yonggang ZHANG. Inertial-frame-based transfer alignment using Rodriguez parameters[J]. Systems Engineering and Electronics, 2022, 44(9): 2903-2913.
share this article
Table 1
Nomenclatures"
| 符号 | 说明 |
| i | 惯性坐标系 |
| n | 导航坐标系(东-北-天) |
| e | 地球坐标系(地心地固坐标系) |
| m | 主惯导体坐标系(右-前-上) |
| s | 子惯导体坐标系(右-前-上) |
| φ, γ,Ψ | 纵摇角、横摇角、航向角 |
| Cxy | x系到y系的方向余弦矩阵 |
| ωxyz | y系相对x系的角速度在z系上的投影 |
| Ia, 0a×b | a×a单位阵, a×b零矩阵(向量) |
| diag(·) | 把向量转换为对角矩阵 |
| (·)-1 | 矩阵求逆运算 |
| (·)T | 矩阵(向量)转置运算 |
| (α×) | 向量α的反对称阵 |

Fig.1
Flow chart of inertial-frame-based transfer alignment method"
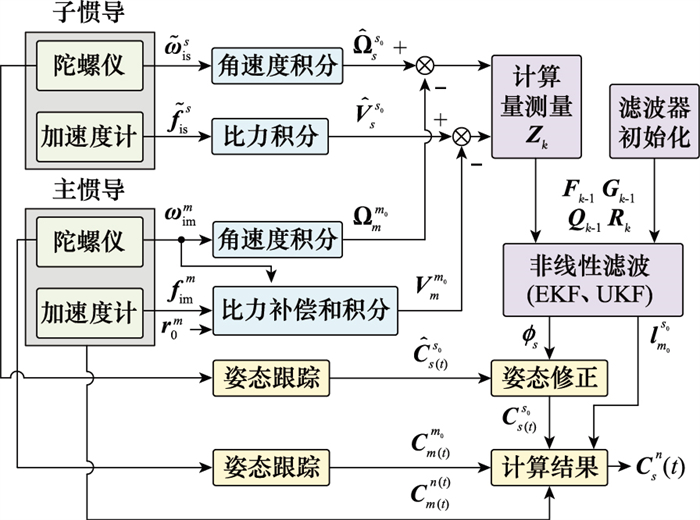
Table 2
Parameters for sway motion"
| 参数 | 设定值 |
| 摇摆幅值/(°) | φm=5, γm=4, Ψm=3 |
| 摇摆周期/s | Tφ=7, Tγ=8, TΨ=9 |
| 初始角度/(°) | φI=0, γI=0, ΨI=45 |
| 离散时间/s | Ts=0.01 |
Table 3
Sensor specifications of slave INS"
| 传感器 | 启动零偏 | 角度/速度随机游走 |
| 陀螺仪 | 100°/h | 1°/ |
| 加速度计 | 5 mg | 100 μg/ |
| 传感器 | 相关时间/s | 过程方差 |
| 陀螺仪 | 50 | (10°/h)2 |
| 加速度计 | 50 | (1 mg)2 |
Fig.2
Curves of attitude errors ϕs"
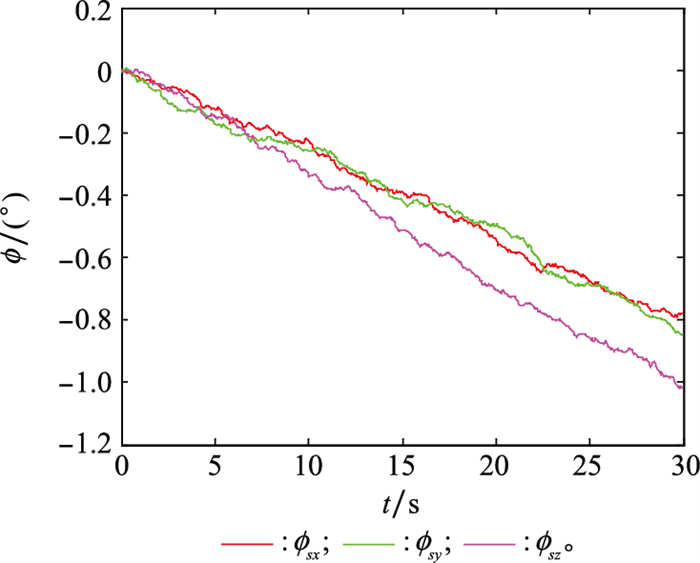

Fig.3
Estimates of installation error angle μxm"
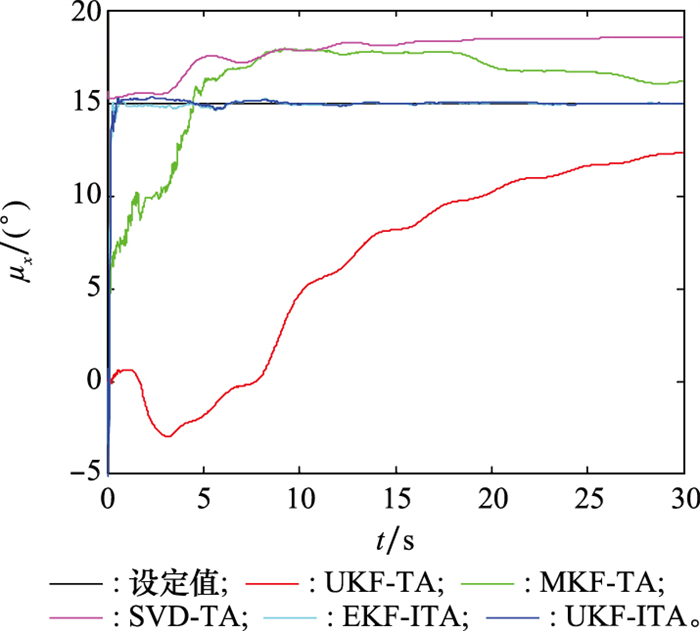
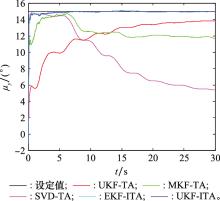
Fig.4
Estimates of installation error angle μym"
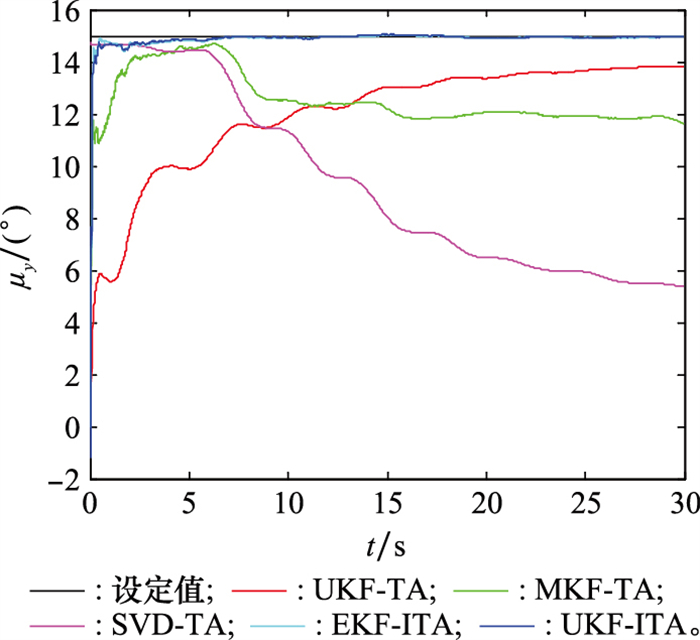
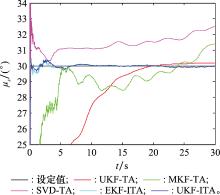
Fig.5
Estimates of installation error angle μzm"
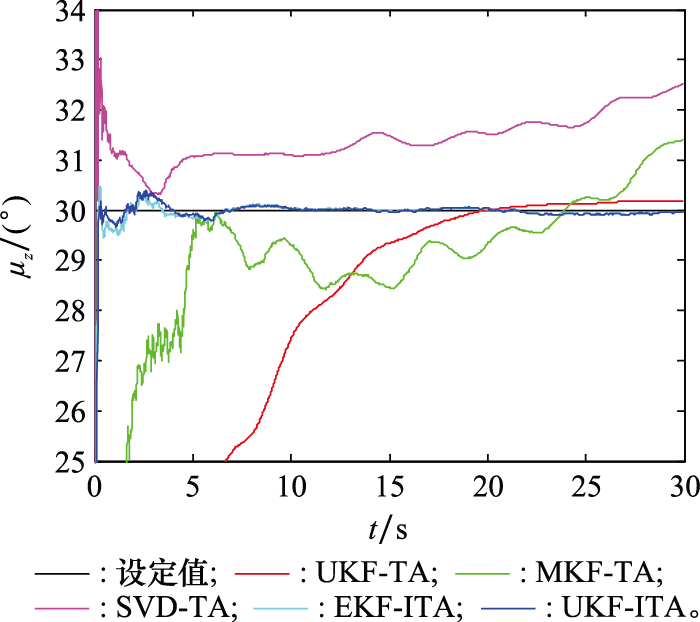
Table 4
Means and RMS of the estimate errors of the installation error angle (20~30 s) (°)"
| 传递对准算法 | 统计方法 | μxm | μym | μzm |
| UKF-TA | 均值 | -3.507 0 | -1.340 9 | 0.127 8 |
| RMS | 3.554 7 | 1.347 7 | 0.137 3 | |
| SVD-TA | 均值 | 3.531 8 | -9.124 3 | 1.933 7 |
| RMS | 3.532 0 | 9.130 8 | 1.957 8 | |
| MKF-TA | 均值 | 1.566 6 | -3.078 3 | 0.241 0 |
| RMS | 1.590 2 | 3.079 9 | 0.675 8 | |
| EKF-ITA | 均值 | 0.005 1 | -0.052 1 | -0.055 9 |
| RMS | 0.031 1 | 0.056 5 | 0.062 9 | |
| UKF-ITA | 均值 | 0.013 6 | -0.050 9 | -0.057 5 |
| RMS | 0.034 1 | 0.054 3 | 0.064 7 |

Fig.6
Estimates of residual lever arm error δrm"
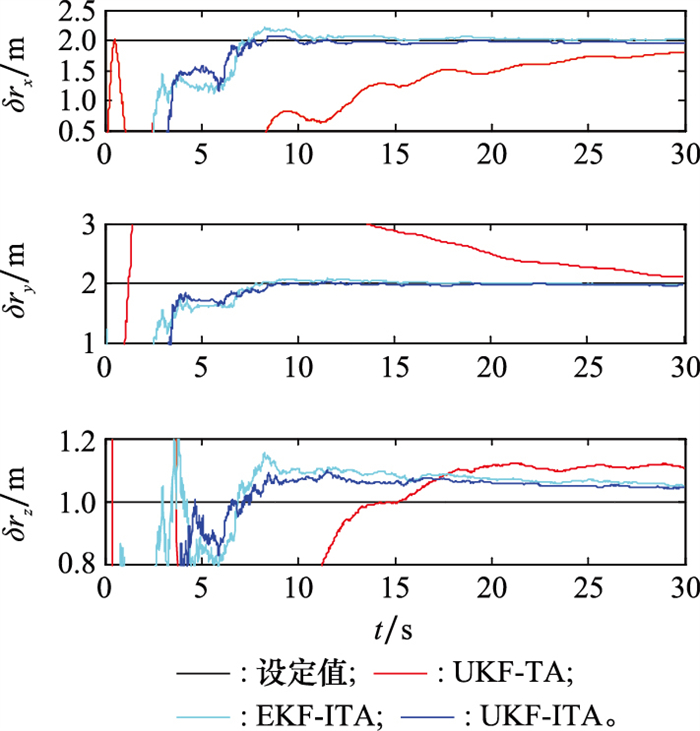

Fig.7
Estimates of gyro bias (turn-on bias and bias instability)"
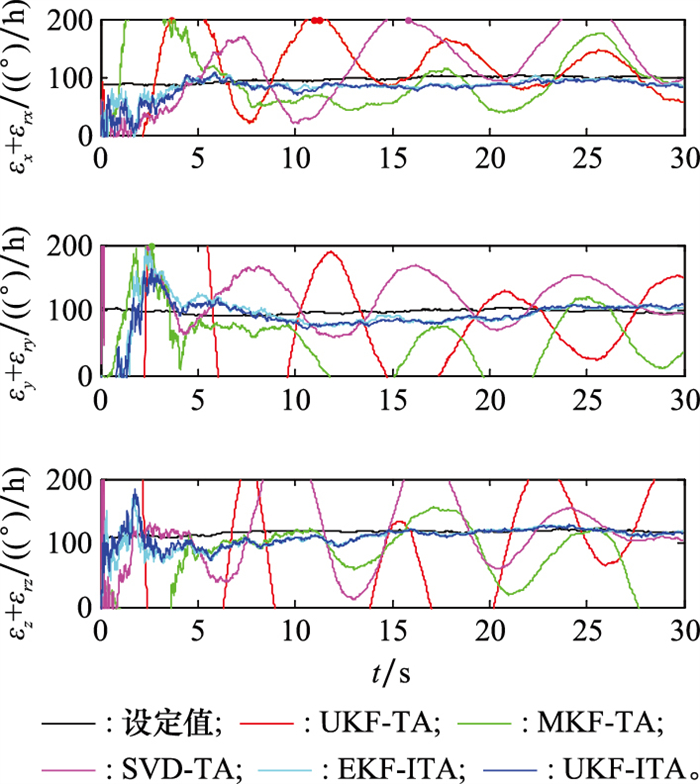
Fig.8
Estimates of accelerometer bias (turn-on bias and bias instability)"
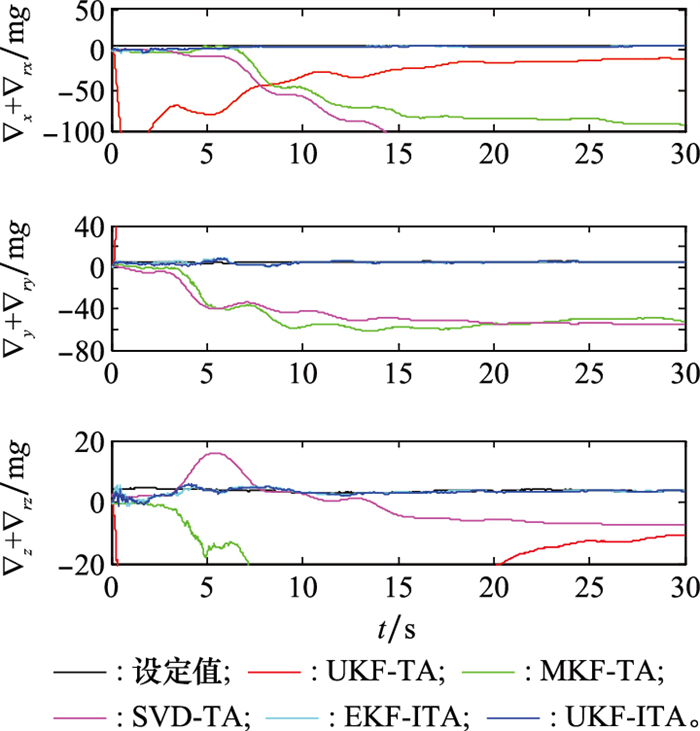

Fig.9
Diagram of field test vehicle and equipment"
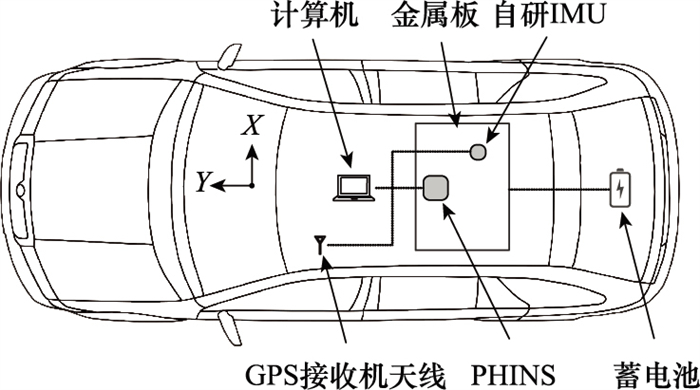
Table 5
Sensor specifications of IMU"
| 传感器 | 零偏稳定性 | 角度/速度随机游走 |
| 陀螺仪 | 1°/h | 0.1°/ |
| 加速度计 | 1 mg | 100 μg/ |

Fig.10
Flow chart of field test"
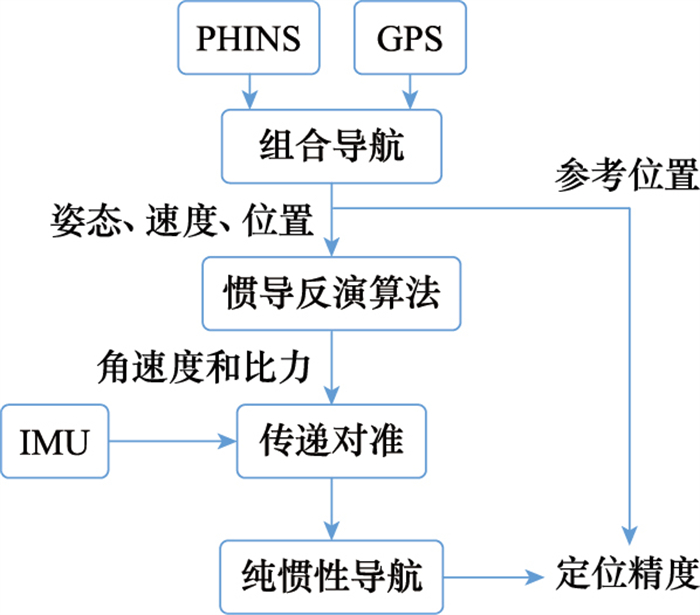
Fig.11
Curves of the trajectory and attitude"
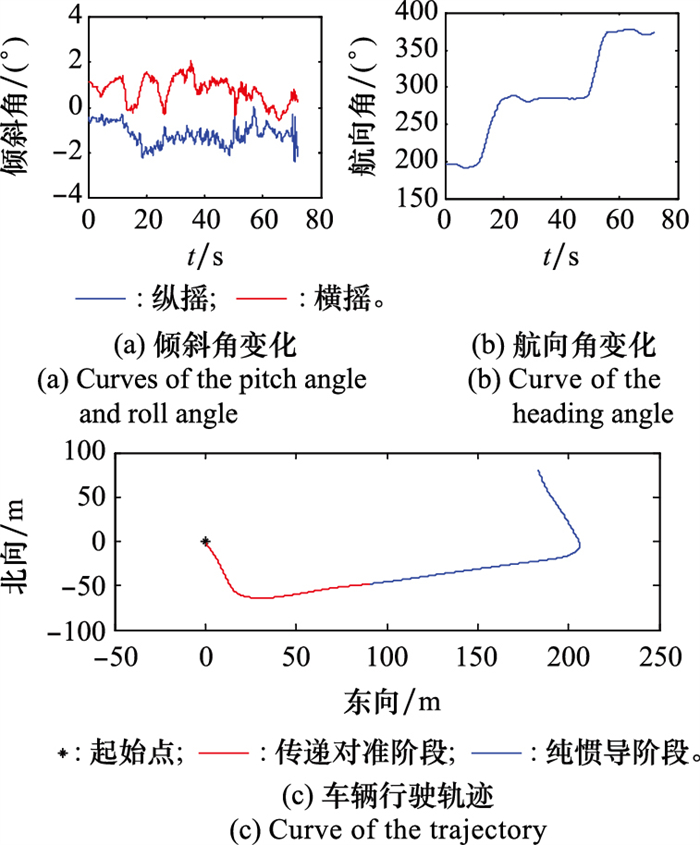
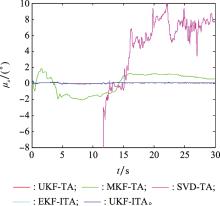
Fig.12
Estimates of installation error angle μxm (field test)"
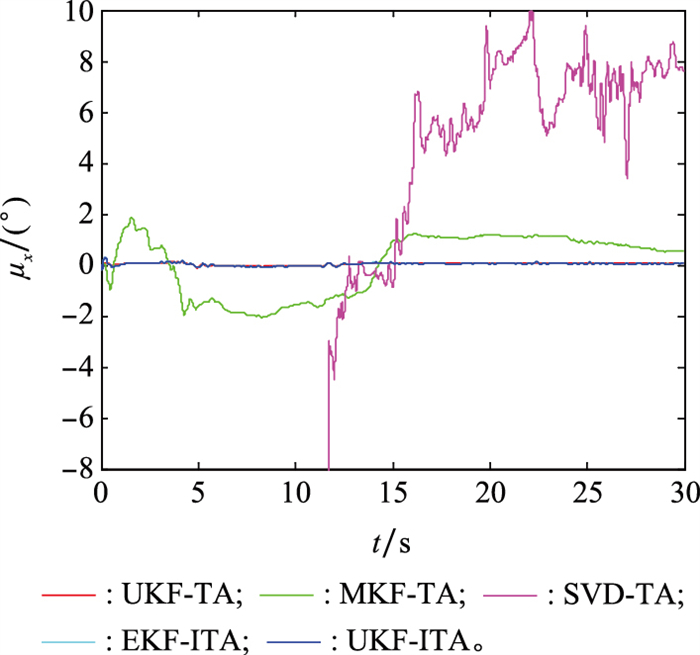
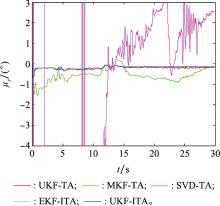
Fig.13
Estimates of installation error angle μym (field test)"
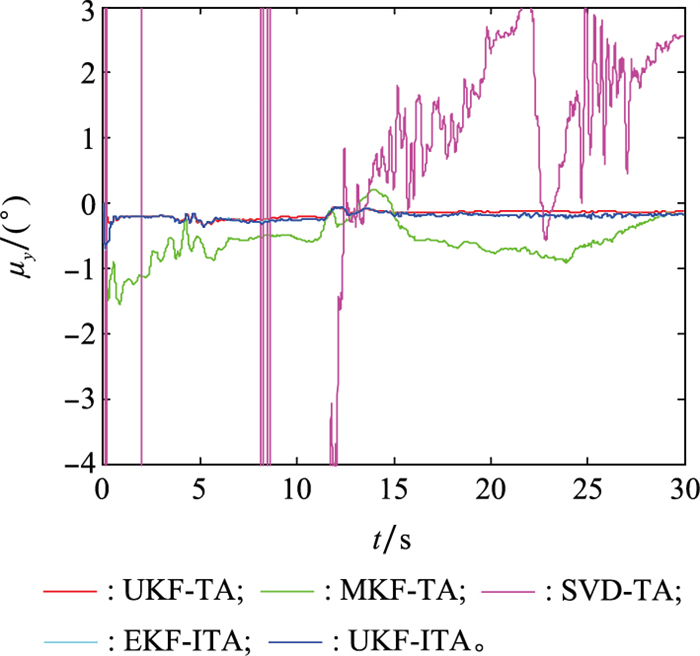
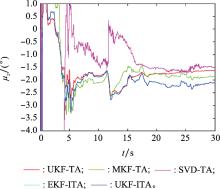
Fig.14
Estimates of installation error angle μzm (field test)"
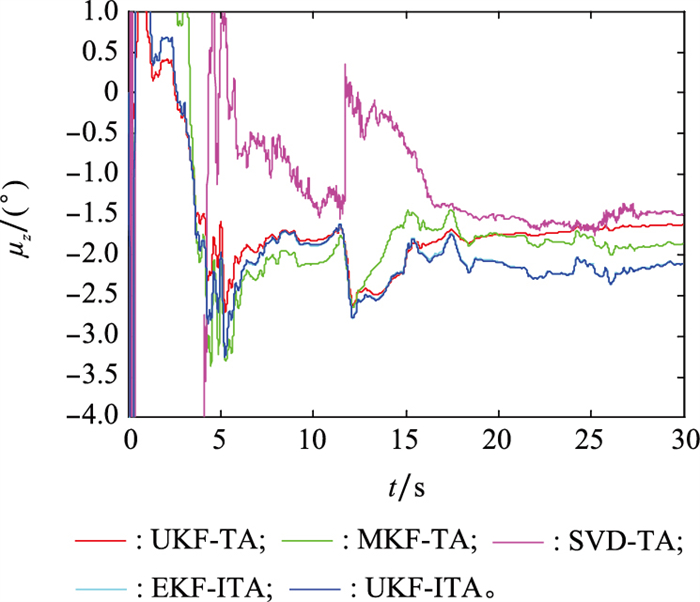
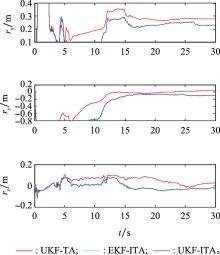
Fig.15
Estimates of lever arm error rm"
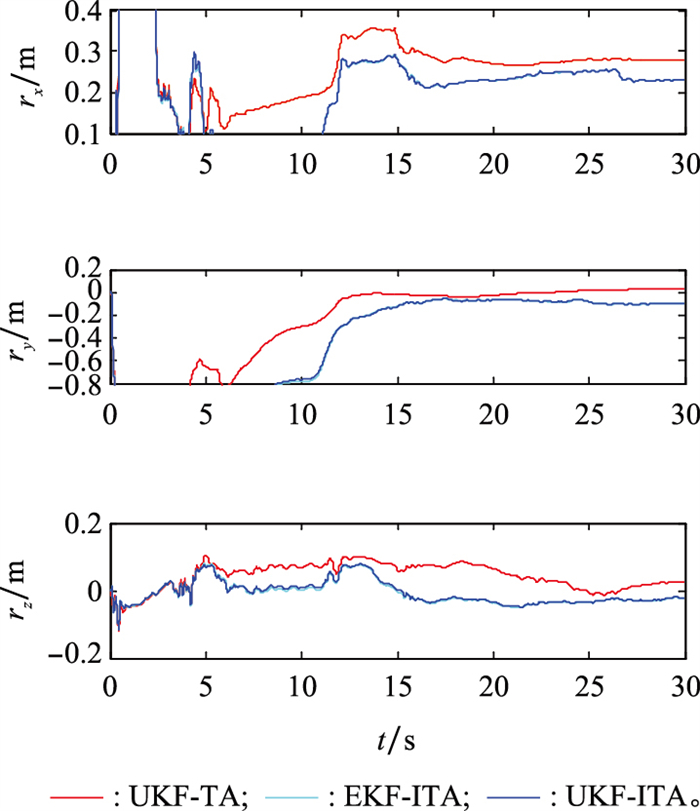

Fig.16
Estimates of gyro bias (turn-on bias)"
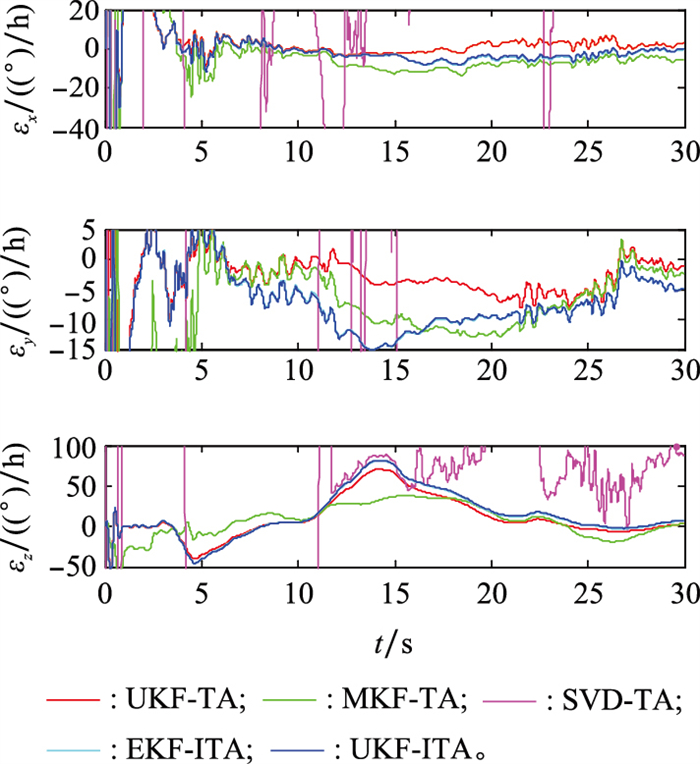

Fig.17
Estimates of accelerometer bias (turn-on bias)"


Fig.18
Position errors of pure inertial navigation"
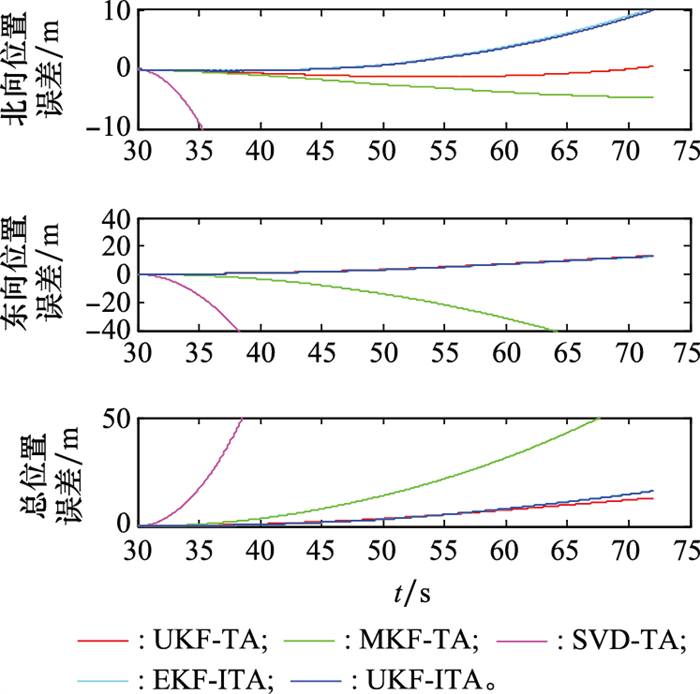
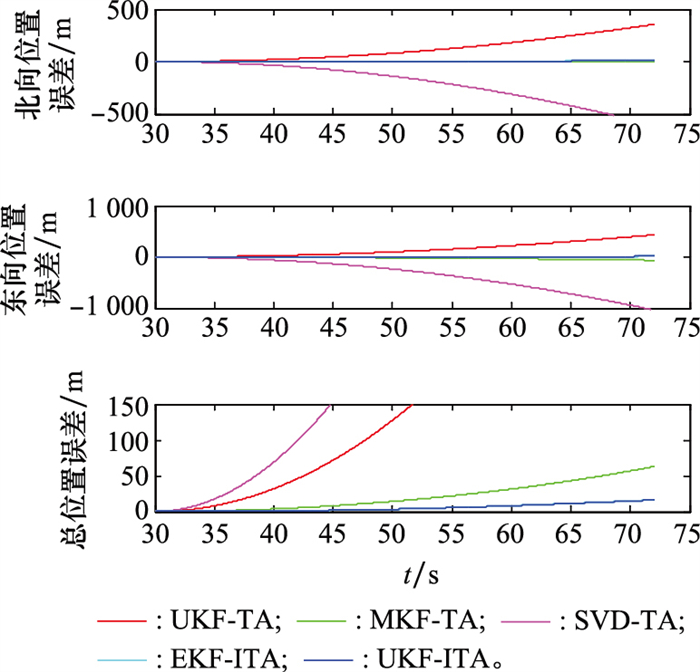
Fig.19
Position errors of pure inertial navigation (large misalignment angles)"
| 1 |
WU Y Y , WU M P , HU X P , et al. Optimization-based alignment for inertial navigation systems: theory and algorithm[J]. Aerospace Science and Technology, 2011, 15 (1): 1- 17.
doi: 10.1016/j.ast.2010.05.004 |
| 2 |
KANG T Z , FANG J C , WANG W . Quaternion-optimization-based in-flight alignment approach for airborne POS[J]. IEEE Trans.on Instrumentation and Measurement, 2012, 61 (11): 2916- 2923.
doi: 10.1109/TIM.2012.2202989 |
| 3 | GROVES P D. Transfer alignment using an integrated INS/GPS as the reference[C]//Proc. of the 55th Annual Meeting of the Institute of Navigation, 1999: 731-737. |
| 4 | GROVES P D, HADDOCK J. An all-purpose rapid transfer alignment algorithm set[C]//Proc. of the National Technical Meeting of the Institute of Navigation, 2001: 160-171. |
| 5 | GROVES P D, WILSON G G, MATHER C J. Robust rapid transfer alignment with an INS/GPS reference[C]//Proc. of the National Technical Meeting of The Institute of Navigation, 2002: 301-311. |
| 6 | GRAHAM W R, RABOURN C, SHORTELLE K J. Rapid alignment prototype (RAP) flight test demonstration[C]//Proc. of the National Technical Meeting of the Institute of Naviga-tion, 1998. |
| 7 | GRAHAM W R, SHORTELLE K J, RABOURN C. F-16 flight tests of a rapid transfer alignment procedure[C]//Proc. of the IEEE Position Location and Navigation Symposium, 1996. |
| 8 |
WANG T D , CHENG J H , GUAN D X . Modified compensation algorithm of lever-arm effect and flexural deformation for polar shipborne transfer alignment based on improved adaptive Kalman filter[J]. Measurement Science and Technology, 2017, 28 (9): 095101.
doi: 10.1088/1361-6501/aa781a |
| 9 |
HUANG Y L , ZHANG Z , DU S Y , et al. A high-accuracy GPS-aided coarse alignment method for MEMS-based SINS[J]. IEEE Trans.on Instrumentation and Measurement, 2020, 69 (10): 7914- 7932.
doi: 10.1109/TIM.2020.2983578 |
| 10 |
GROVES P D . Optimising the transfer alignment of weapon INS[J]. Journal of Navigation, 2003, 56 (2): 323- 335.
doi: 10.1017/S0373463303002261 |
| 11 |
LU J Z , XIE L L , LI B G . Applied quaternion optimization method in transfer alignment for airborne AHRS under large misalignment angle[J]. IEEE Trans.on Instrumentation and Measurement, 2016, 65 (2): 346- 354.
doi: 10.1109/TIM.2015.2502838 |
| 12 | LU J Z , YE L L , DONG J . Applied singular value decomposition method in transfer alignment and bias calibration[J]. IET Radar, Sonar & Navigation, 2020, 14 (5): 700- 706. |
| 13 |
崔潇, 秦永元, 严恭敏, 等. 任意失准角无奇异快速传递对准[J]. 宇航学报, 2018, 39 (10): 1127- 1133.
doi: 10.3873/j.issn.1000-1328.2018.10.008 |
|
CUI X , QIN Y Y , YAN G M , et al. Nonsingular rapid transfer alignment for SINS at random misalignment angles[J]. Journal of Astronautics, 2018, 39 (10): 1127- 1133.
doi: 10.3873/j.issn.1000-1328.2018.10.008 |
|
| 14 | BAZIW J , LEONDES C T . In-flight alignment and calibration of inertial measurement units, Part Ⅰ: general formulation[J]. IEEE Trans.on Aerospace and Electronic Systems, 1972, 8 (4): 439- 449. |
| 15 | BAZIW J , LEONDES C T . In-flight alignment and calibration of inertial measurement units, Part Ⅱ: experimental results[J]. IEEE Trans.on Aerospace and Electronic Systems, 1972, 8 (4): 450- 465. |
| 16 | KAIN J, CLOUTIER J. Rapid transfer alignment for tactical weapon applications[C]//Proc. of the AIAA Guidance, Navigation and Control Conference, 1989: 3581. |
| 17 |
XU G , HUANG Y L , GAO Z X , et al. A computationally efficient variational adaptive Kalman filter for transfer alignment[J]. IEEE Sensors Journal, 2020, 20 (22): 13682- 13693.
doi: 10.1109/JSEN.2020.3004621 |
| 18 |
GONG X L , FAN W , FANG J C . An innovational transfer alignment method based on parameter identification UKF for airborne distributed POS[J]. Measurement, 2014, 58, 103- 114.
doi: 10.1016/j.measurement.2014.08.034 |
| 19 |
ZOU S Y , LI J L , LU Z X . A nonlinear transfer alignment of distributed POS based on adaptive second-order divided difference filter[J]. IEEE Sensors Journal, 2018, 18 (23): 9612- 9618.
doi: 10.1109/JSEN.2018.2869979 |
| 20 |
CHENG J H , WANG T D , GUAN D X , et al. Polar transfer alignment of shipborne SINS with a large misalignment angle[J]. Measurement Science and Technology, 2016, 27 (3): 035101.
doi: 10.1088/0957-0233/27/3/035101 |
| 21 |
严恭敏, 秦永元, 卫育新, 等. 一种适用于SINS动基座初始对准的新算法[J]. 系统工程与电子技术, 2009, 31 (3): 634- 637.
doi: 10.3321/j.issn:1001-506X.2009.03.036 |
|
YAN G M , QIN Y Y , WEI Y X , et al. New initial alignment algorithm for SINS on moving base[J]. Systems Engineering and Electronics, 2009, 31 (3): 634- 637.
doi: 10.3321/j.issn:1001-506X.2009.03.036 |
|
| 22 | 梅春波. 捷联惯性导航系统惯性系非线性初始对准技术研究[D]. 西安: 西北工业大学, 2016. |
| MEI C B. Nonlinear initial alignment in inertial frame for SINS[D]. Xi'an: Northwestern Polytechnical University, 2016. | |
| 23 |
CUI X , MEI C B , QIN Y Y , et al. A unified model for transfer alignment at random misalignment angles based on second-order EKF[J]. Measurement Science and Technology, 2017, 28 (4): 045106.
doi: 10.1088/1361-6501/aa5b75 |
| 24 | MOCHALOV A V, PRIVALOV V E, KAZANTASEV A V. Use of the ring laser units for measurement of the moving object deformation[C]//Proc. of the 2nd International Conference on Lasers for Measurement and Information Transfer, 2002. |
| 25 | 吕遐东, 刘佳铭, 姚腾钢. 船舶动态变形特性分析与测量方法研究[J]. 华中科技大学学报: 自然科学版, 2013, 41 (S1): 215- 218. |
| LYU X D , LIU J M , YAO T G . Research on ship dynamic deformation characteristic analysis and measurement method[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2013, 41 (S1): 215- 218. | |
| 26 | 李四海, 王珏, 刘镇波, 等. 快速传递对准中机翼弹性变形估计方法比较[J]. 中国惯性技术学报, 2014, 22 (1): 38- 44. |
| LI S H , WANG J , LIU Z B , et al. Comparison of wing distortion estimation methods in transfer alignment[J]. Journal of Chinese Inertial Technology, 2014, 22 (1): 38- 44. | |
| 27 |
WANG B , DENG Z H , LIU C , et al. Estimation of information sharing error by dynamic deformation between inertial navi-gation systems[J]. IEEE Trans.on Industrial Electronics, 2014, 61 (4): 2015- 2023.
doi: 10.1109/TIE.2013.2271595 |
| 28 | 严恭敏, 李四海, 秦永元. 惯性仪器测试与数据分析[M]. 北京: 国防工业出版社, 2015: 136- 147. |
| YAN G M , LI S H , QIN Y Y . Inertial instrument testing and data analysis[M]. Beijing: National Defense Industry Press, 2015: 136- 147. | |
| 29 |
DAMBECK J , BLUM C . Analytical assessment of the propagation of colored sensor noise in strapdown inertial navigation[J]. Sensors, 2020, 20 (23): 6914.
doi: 10.3390/s20236914 |
| 30 | FARRELL J A, SILVA F O, RAHMAN F, et al. IMU error modeling tutorial: INS state estimation with real-time sensor calibration[EB/OL]. [2021-11-06]. https://escholarship.org/uc/item/1vf7j52p. |
| 31 |
CUI X , YAN G M , FU Q W . A unified nonsingular rapid transfer alignment solution for tactical weapon based on matrix Kalman filter[J]. IEEE Access, 2018, 6, 78700- 78709.
doi: 10.1109/ACCESS.2018.2885144 |
| 32 |
WU Y X , PAN X F . Velocity/position integration formula part Ⅰ: application to in-flight coarse alignment[J]. IEEE Trans.on Aerospace and Electronic Systems, 2013, 49 (2): 1006- 1023.
doi: 10.1109/TAES.2013.6494395 |
| 33 |
CHOUKROUN D , WEISS H , BAR-ITZHACK I Y , et al. Kalman filtering for matrix estimation[J]. IEEE Trans.on Aerospace and Electronic Systems, 2006, 42 (1): 147- 159.
doi: 10.1109/TAES.2006.1603411 |
| 34 | 严恭敏, WANGJinling, 周馨怡. 基于实测轨迹的高精度捷联惯导模拟器[J]. 导航定位学报, 2015, 3 (4): 27- 31. |
| YAN G M , WANG J L , ZHOU X Y . High-precision simulator for strapdown inertial navigation systems based on real dynamics[J]. Journal of Navigation and Positioning, 2015, 3 (4): 27- 31. |
| [1] | Yang LI, Meng LIU, Jing GONG, Yongzhao WANG, Fujian DENG. Double-velocity inertial-frame alignment algorithm with pseudo INS modeling in polar regions [J]. Systems Engineering and Electronics, 2022, 44(5): 1677-1684. |
| [2] | Shiwen HAO, Zhili ZHANG, Zhaofa ZHOU, Zhenjun CHANG, Xianyi LIU. Influence of gravity disturbance on initial alignment of inertial navigation system [J]. Systems Engineering and Electronics, 2020, 42(7): 1575-1581. |
| [3] | Rongzong SHI, Chen MA, Zhengyu GUO. Application analysis of velocity matching algorithm in transfer alignment [J]. Systems Engineering and Electronics, 2020, 42(10): 2328-2333. |
| [4] | JIANG Xiuhong, DUAN Fuhai, HU Ailing. Predictive maintenance for multistate system based on maintenance importance [J]. Systems Engineering and Electronics, 2018, 40(4): 839-844. |
| [5] | FANG Min, CHENG Ziyang, HE Zishu, LI Jun. Multi-target paring algorithm for distributed radar with INS error [J]. Systems Engineering and Electronics, 2018, 40(2): 308-313. |
| [6] | XIA Weixing, YANG Xiaodong. ESO estimation algorithm for gyro drift of INS [J]. Systems Engineering and Electronics, 2018, 40(12): 2804-2809. |
| [7] | WANG Wei, GUO Huijie, MENG Yue. Satellite/pseudolite/INS integrated navigation algorithm [J]. Systems Engineering and Electronics, 2017, 39(2): 391-397. |
| [8] | LI Ye1, GUO Jianguo1, ZHAO Bin1, YOU YuHua2, LU Xiaodong1, ZHOU Jun1. Aircraft dynamicsaided MEMS inertial navigation system [J]. Systems Engineering and Electronics, 2016, 38(8): 1880-1885. |
| [9] | CHENG Jianhua, WANG Tongda, SONG Chunyu, YU Dongwei. Modified adaptive filter algorithm for shipborne SINS transfer alignment [J]. Systems Engineering and Electronics, 2016, 38(3): 638-643. |
| [10] | DENG Zhi-hong, CAI Shan-bo, WANG Bo, FU Meng-yin. Compound rotation control algorithm for rotational INS [J]. Systems Engineering and Electronics, 2016, 38(11): 2610-2616. |
| [11] | LIU Shuai, SUN Fu-ping, ZHANG Lun-dong. Research on the tight integration of ambiguity-fixed PPP and INS [J]. Systems Engineering and Electronics, 2016, 38(10): 2389-2394. |
| [12] | GAO Wei1, SHAN Wei1, XU Bo1, CHENG Zhengsheng2. Transfer alignment of platform inertial navigation#br# in the inertial coordinate [J]. Systems Engineering and Electronics, 2015, 37(5): 1151-1156. |
| [13] | CHENG Jian-hua, CHEN Dai-dai, WANG Bing-yu, WANG Tong-da. Approach of transfer alignment accuracy evaluation based on observability degree analysis [J]. Systems Engineering and Electronics, 2015, 37(4): 895-900. |
| [14] | CONG Li, LI Er-cui, ZHANG Li-yang, QIN Hong-lei, XUE Rui. GPS/INS integrated navigation attitude determination method based on CLAMBDA and AFM aided by INS [J]. Systems Engineering and Electronics, 2015, 37(4): 882-887. |
| [15] | LI Chan, YU Hao-zhang, ZHANG Shi-feng. Transfer alignment technology of the platform inertial navigation system [J]. Systems Engineering and Electronics, 2015, 37(12): 2823-2829. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||