Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (9): 2894-2902.doi: 10.12305/j.issn.1001-506X.2022.09.24
• Guidance, Navigation and Control • Previous Articles Next Articles
Approach for detection of slowly growing fault based on robust estimation and improved AIME
Yingying JIANG, Shuguo PAN*, Fei YE, Wang GAO, Chun MA, Hao WANG
- School of Instrument Science and Engineering, Southeast University, Nanjing 210096, China
-
Received:2021-08-17Online:2022-09-01Published:2022-09-09 -
Contact:Shuguo PAN
CLC Number:
Cite this article
Yingying JIANG, Shuguo PAN, Fei YE, Wang GAO, Chun MA, Hao WANG. Approach for detection of slowly growing fault based on robust estimation and improved AIME[J]. Systems Engineering and Electronics, 2022, 44(9): 2894-2902.
share this article
Fig.1
Flowchart of detection of slowly growing fault based on REKF-t and improved AIME"
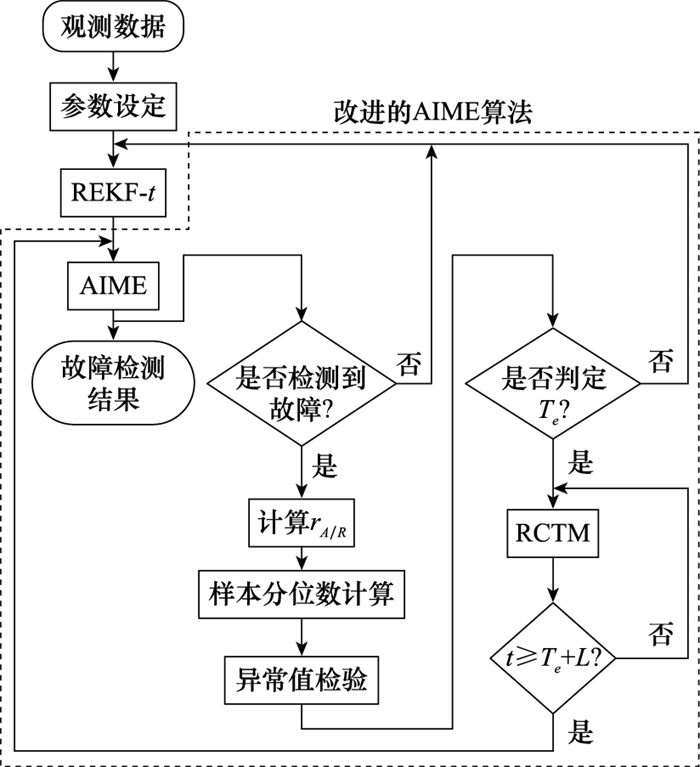
Fig.2
Simulated trajectory of the aircraft"
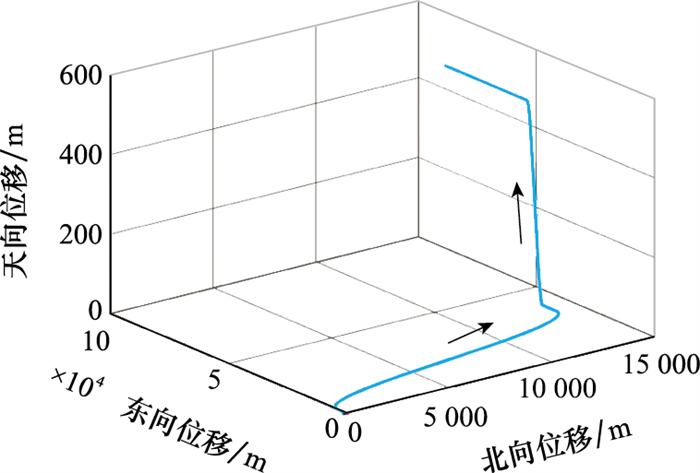

Fig.3
Innovations of satellite 1 under EKF and REKF-t (0.15 m/s)"
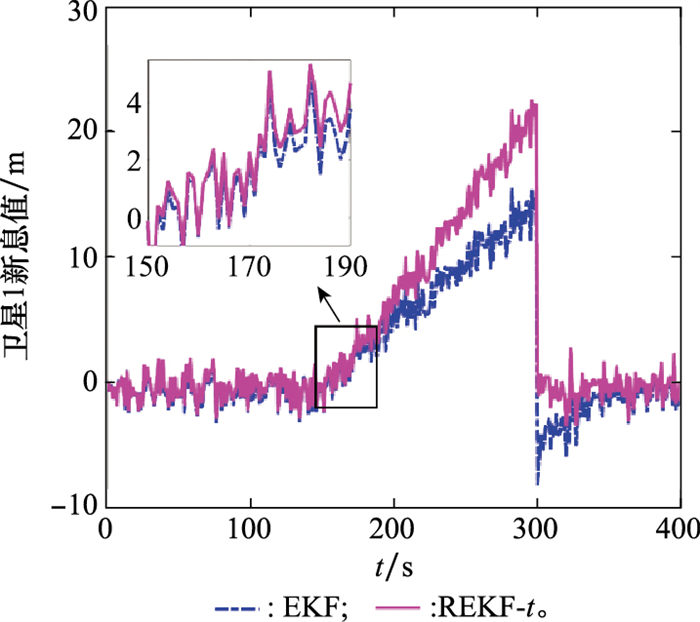

Fig.4
Innovations of satellite 1 at different fault rates (REKF-t)"
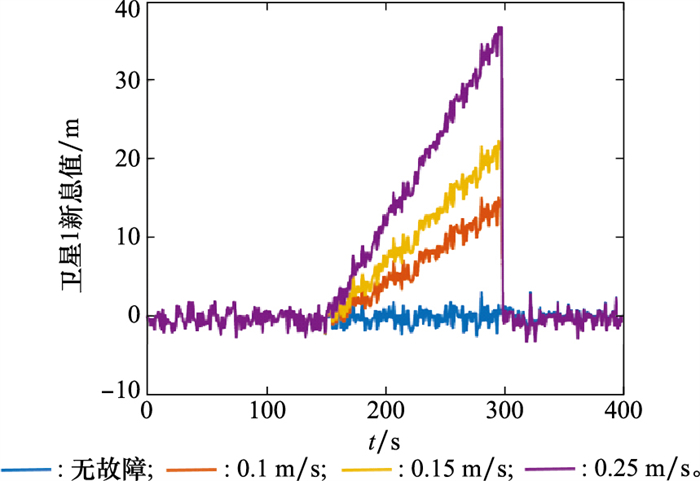
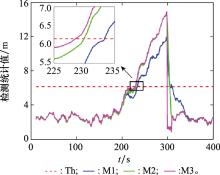
Fig.5
Change curves of test statistics at 0.1 m/s fault rate"

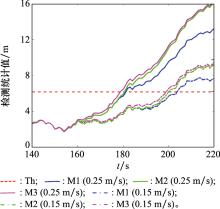
Fig.6
Change curves of test statistics at 0.15 m/s fault rate and 0.25 m/s fault rate"

Table 1
Comparison of delay time under three fault detection schemes s"
| 故障检测法 | 缓变速率/(m/s) | ||
| 0.1 | 0.15 | 0.25 | |
| 方案1(M1) | 85 | 54 | 32 |
| 方案2(M2) | 81 | 51 | 31 |
| 方案3(M3) | 79 | 49 | 29 |
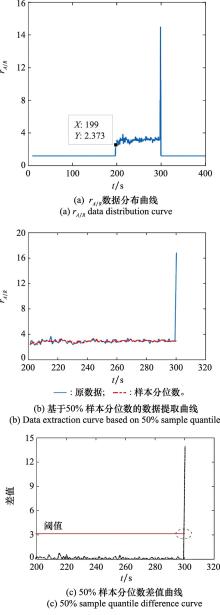
Fig.7
Workflow of improved AIME algorithm at 0.15 m/s fault rate"
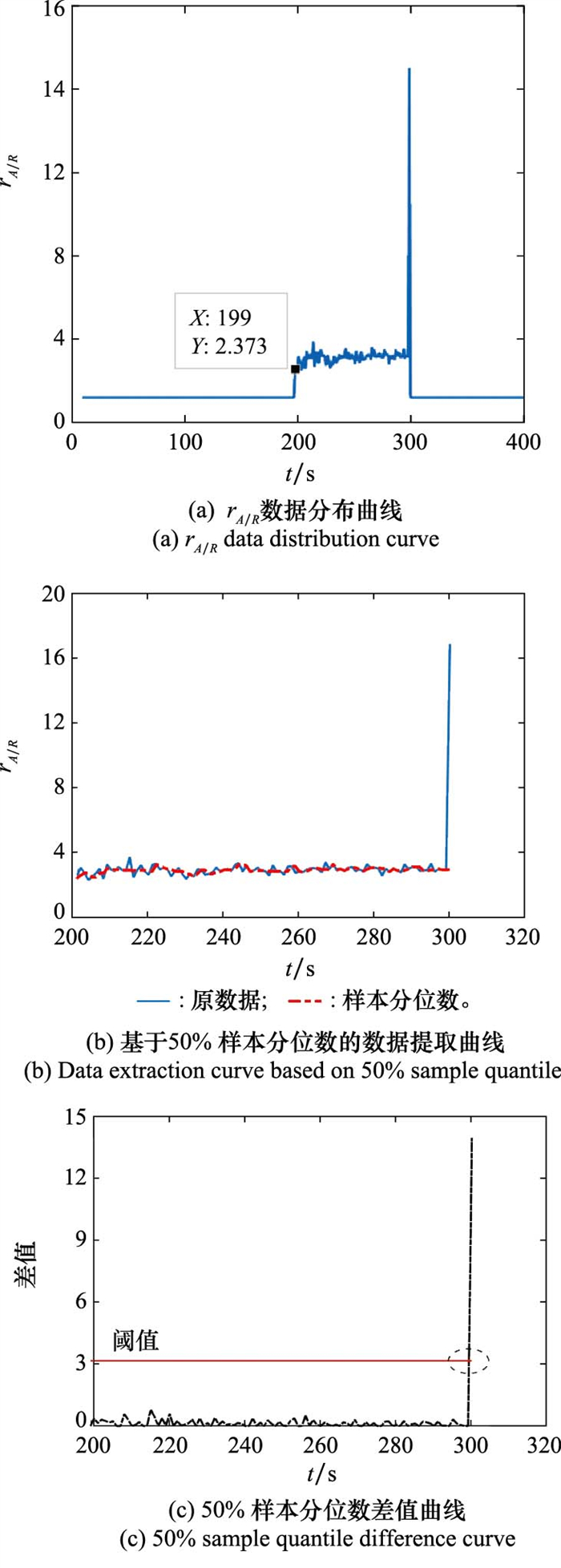
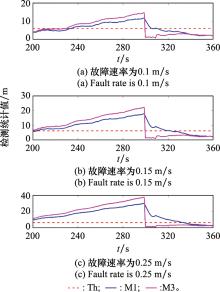
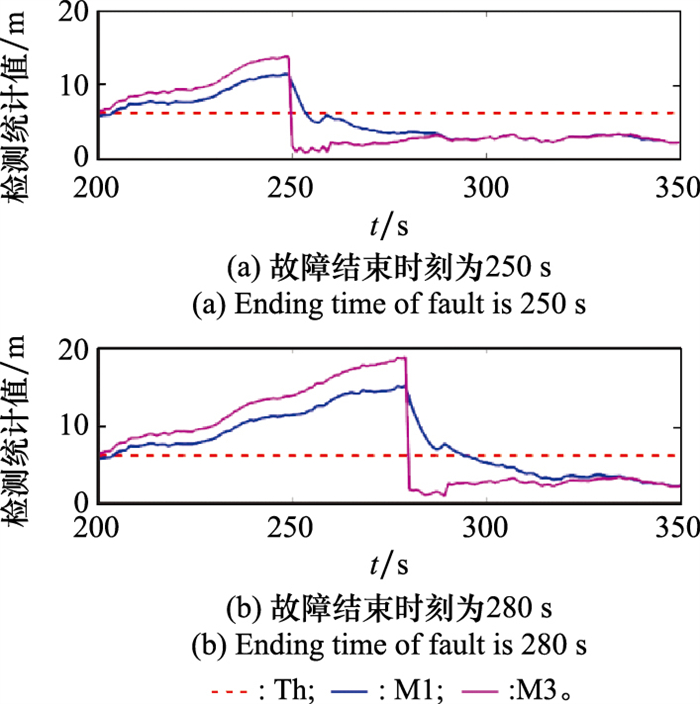
Fig.8
Comparison diagram of ending time of different fault rates under two fault detection schemes"


Fig.9
Difference curves of different ending time of faults"

Fig.10
Comparison diagram of different ending time of 0.15 m/s fault rates under two fault detection schemes"
| 1 |
PAN W C , ZHAN X Q , ZHANG X , et al. A subset-reduced method for FDE ARAIM of tightly-coupled GNSS/INS[J]. Sensors, 2019, 19 (22): 4847.
doi: 10.3390/s19224847 |
| 2 | PAN W C , ZHAN X Q , ZHANG X , et al. Fault exclusion method for ARAIM based on tight GNSS/INS integration to achieve CAT-I approach[J]. IET Radar, Sonar & Navigation, 2019, 13 (11): 1909- 1917. |
| 3 |
WANG S Z , ZHAN X Q , ZHAI Y W , et al. Fault detection and exclusion for tightly coupled GNSS/INS system considering fault in state prediction[J]. Sensors, 2020, 20 (3): 590.
doi: 10.3390/s20030590 |
| 4 |
ZHAO X , WANG S C , ZHANG J S , et al. Real-time fault detection method based on belief rule base for aircraft navigation system[J]. Chinese Journal of Aeronautics, 2013, 26 (3): 717- 729.
doi: 10.1016/j.cja.2013.04.039 |
| 5 | TANIL C, KHANAFSEH S, JOERGER M, et al. Sequential integrity monitoring for Kalman filter innovations-based detectors[C]//Proc. of the 31st International Technical Meeting of the Satellite Division of the Institute of Navigation, 2018: 2440-2455. |
| 6 | GROSCH A, CRESPILLO O G, MARTINI I, et al. Snapshot residual and Kalman filter based fault detection and exclusion schemes for robust railway navigation[C]//Proc. of European Navigation Conference, 2017: 36-47. |
| 7 |
BHATTI U I , OCHIENG W Y . Failure modes and models for integrated GPS/INS systems[J]. Journal of Navigation, 2007, 60 (2): 327- 348.
doi: 10.1017/S0373463307004237 |
| 8 |
ZHANG C , ZHAO X B , PANG C L , et al. Improved fault detection method based on robust estimation and sliding window test for INS/GNSS integration[J]. Journal of Navigation, 2020, 73 (4): 776- 796.
doi: 10.1017/S0373463319000778 |
| 9 |
JOERGER M , PERVAN B . Kalman filter-based integrity monitoring against sensor faults[J]. Journal of Guidance, Control and Dynamics, 2013, 36 (2): 349- 361.
doi: 10.2514/1.59480 |
| 10 | LIU H Y, ZHENG G, WANG H N, et al. Research on integrity monitoring for integrated GNSS/SINS system[C]//Proc. of the IEEE International Conference on Information and Automation, 2010: 1990-1995. |
| 11 | 刘海颖, 岳亚洲, 杨毅钧. 基于多解分离的GNSS/Inertial组合导航完好性监测[J]. 中国惯性技术学报, 2012, 20 (1): 63- 68. |
| LIU H Y , YUE Y Z , YANG Y J . Integrity monitoring for GNSS/Inertial based on multiple solution separation[J]. Journal of Chinese Inertial Technology, 2012, 20 (1): 63- 68. | |
| 12 | CRESPILLO O G, GROSCH A, SKALOUD J, et al. Innovation vs residual KF based GNSS/INS autonomous integrity monitoring in single fault scenario[C]//Proc. of the 30th International Technical Meeting of the Satellite Division of the Institute of Navigation, 2017: 2126-2136. |
| 13 |
BHATTI U I , OCHIENG W Y , FENG S . Integrity of an integrated GPS/INS system in the presence of slowly growing errors[J]. Part Ⅰ: a critical review. GPS Solutions, 2007, 11 (3): 173- 181.
doi: 10.1007/s10291-006-0048-2 |
| 14 | 刘海颖, 冯成涛, 王惠南. 一种惯性辅助卫星导航系统及其完好性检测方法[J]. 宇航学报, 2011, 32 (4): 775- 780. |
| LIU H Y , FENG C T , WANG H N . Method of inertial aided satellite navigation and its integrity monitoring[J]. Journal of Astronautics, 2011, 32 (4): 775- 780. | |
| 15 |
钟丽娜, 刘建业, 李荣冰, 等. 基于LS-SVM的惯性/卫星紧组合导航系统缓变故障检测方法[J]. 中国惯性技术学报, 2012, 20 (6): 754- 758.
doi: 10.3969/j.issn.1005-6734.2012.06.027 |
|
ZHONG L N , LIU J Y , LI R B , et al. Approach for detection of slowly growing errors in INS/GNSS tightly-coupled system based on LS-SVM[J]. Journal of Chinese Inertial Technology, 2012, 20 (6): 754- 758.
doi: 10.3969/j.issn.1005-6734.2012.06.027 |
|
| 16 |
BHATTI U I , OCHIENG W Y , FENG S . Performance of rate detector algorithms for an integrated GPS/INS system in the presence of slowly growing error[J]. GPS Solutions, 2012, 16 (3): 293- 301.
doi: 10.1007/s10291-011-0231-y |
| 17 | 钟丽娜. 惯性/卫星组合导航自适应容错与精度性能增强关键技术研究[D]. 南京: 南京航空航天大学, 2016. |
| ZHONG L N. Research on key technology of adaptive fault-tolerant and accuracy enhancement of INS/GNSS integrated navigation[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2016. | |
| 18 |
ZHONG L N , LIU J Y , LI R B , et al. Approach for detecting soft faults in GPS/INS integrated navigation based on LS-SVM and AIME[J]. Journal of Navigation, 2017, 70 (3): 561- 579.
doi: 10.1017/S037346331600076X |
| 19 | 李臻, 宋丹, 张鹏飞, 等. 基于抗差扩展卡尔曼滤波和外推-积累的RAIM方法[J]. 系统工程与电子技术, 2017, 39 (9): 2094- 2099. |
| LI Z , SONG D , ZHANG P F , et al. RAIM method based on robust extended Kalman filter and extrapolation-accumulation[J]. Systems Engineering and Electronics, 2017, 39 (9): 2094- 2099. | |
| 20 | WANG S Z , ZHAN X Q , PAN W . GNSS/INS tightly coupling system integrity monitoring by robust estimation[J]. Journal of Aeronautics, Astronautics and Aviation, 2018, 50 (1): 61- 80. |
| 21 |
杨元喜, 吴富梅. 临界值可变的抗差估计等价权函数[J]. 测绘科学技术学报, 2006, 23 (5): 317- 320.
doi: 10.3969/j.issn.1673-6338.2006.05.002 |
|
YANG Y X , WU F M . Modified equivalent weight function with variable criterion for robust estimation[J]. Journal of Geomatics Science and Technology, 2006, 23 (5): 317- 320.
doi: 10.3969/j.issn.1673-6338.2006.05.002 |
|
| 22 | 张闯, 赵修斌, 庞春雷, 等. 基于改进型AIME-RCTM的组合导航联合故障检测方法[C]//第九届中国卫星导航学术年会论文集——S10多源融合导航技术, 2018. |
| ZHANG C, ZHAO X B, PANG C L, et al. Joint fault detection method for integrated navigation based on improved AIME-RCTM[C]//Proc. of the 9th China Satellite Navigation Annual Conference—S10 Multi-source Fusion Navigation Technology, 2018. | |
| 23 | GROVES P D . Principles of GNSS, inertial, and multi-sensor integrated navigation systems[M]. 2nd ed Boston: Artech House, 2013. |
| 24 |
BLANCH J , WALKER T , ENGE P , et al. Baseline advanced RAIM user algorithm and possible improvements[J]. IEEE Trans.on Aerospace and Electronic Systems, 2015, 51 (1): 713- 732.
doi: 10.1109/TAES.2014.130739 |
| 25 | 杨元喜, 任夏, 许艳. 自适应抗差滤波理论及应用的主要进展[J]. 导航定位学报, 2013, 1 (1): 9- 15. |
| YANG Y X , REN X , XU Y . Main progress of adaptively robust filter with applications in navigation[J]. Journal of Navigation and Positioning, 2013, 1 (1): 9- 15. | |
| 26 |
YANG Y X , XU J Y . GNSS receiver autonomous integrity monitoring (RAIM) algorithm based on robust estimation[J]. Geodesy and Geodynamics, 2016, 7 (2): 117- 123.
doi: 10.1016/j.geog.2016.04.004 |
| 27 | WANG W B, FAN G C, FEI N, et al. Analysis and comparison of robust least squares estimation based on multi-constellation integrated navigation[C]//Proc. of 2nd IEEE International Conference on Computer and Communications, 2016: 1752-1756. |
| 28 |
ZHANG Q Q , ZHAO L D , ZHAO L , et al. An improved robust adaptive Kalman filter for GNSS precise point positioning[J]. IEEE Sensors Journal, 2018, 18 (10): 4176- 4186.
doi: 10.1109/JSEN.2018.2820097 |
| 29 | 盛骤, 谢式千, 潘承毅. 概率论与数理统计[M]. 4版 北京: 高等教育出版社, 2011. |
| SHENG Z , XIE S Q , PAN C Y . Probability theory and mathematical statistics[M]. 4th ed Beijing: Higher Education Press, 2011. | |
| 30 |
LIU Y , LI S H , FU Q W , et al. Analysis of Kalman filter innovation-based GNSS spoofing detection method for INS/GNSS integrated navigation system[J]. IEEE Sensors Journal, 2019, 19 (13): 5167- 5178.
doi: 10.1109/JSEN.2019.2902178 |
| 31 | JENTSCH C , LEUCHT A . Bootstrapping sample quantiles of discrete data[J]. Working Papers, 2014, 68 (3): 491- 539. |
| [1] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [2] | Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000. |
| [3] | Shuguang SUN, Qixin WEN. Aircraft height optimization algorithm of integrated navigation in terminal area based on height anomaly compensation [J]. Systems Engineering and Electronics, 2021, 43(9): 2612-2619. |
| [4] | Zhe WEN, Hongwei BIAN, Heng MA, Tao ZANG. Simulation test method of inertial navigation polar performance at middle and low latitudes [J]. Systems Engineering and Electronics, 2021, 43(9): 2620-2627. |
| [5] | Renjie ZHAO, Baiqing HU, Xu LYU, Jiayu TIAN. Filtering algorithm of UKF integrated navigation based on dual-Euler angles [J]. Systems Engineering and Electronics, 2021, 43(7): 1912-1920. |
| [6] | Baojie CAI, Lei SHAO. Robust filtering algorithm based on three discriminant domain and least squares fitting [J]. Systems Engineering and Electronics, 2021, 43(5): 1346-1353. |
| [7] | Jing SU, Huafeng HE, Yaomin HE, Yifan WANG, Xiaofei HAN. Filtering algorithm of missile-borne SINS/SAR integrated navigation considering SAR measurement characteristics [J]. Systems Engineering and Electronics, 2021, 43(4): 1044-1049. |
| [8] | Xu LYU, Baiqing HU, Yongbin DAI, Renjie ZHAO. Application of USQUE based on PSO in attitude estimation of integrated navigation [J]. Systems Engineering and Electronics, 2020, 42(6): 1366-1371. |
| [9] | Kaixin LUO, Meiping WU, Ying FAN. Robust adaptive filtering based on maximum entropy method and its application [J]. Systems Engineering and Electronics, 2020, 42(3): 667-673. |
| [10] | Kanghui HE, Chaoyang DONG. Orthogonal transformed fifth-order cubature Kalman filter for navigation [J]. Systems Engineering and Electronics, 2020, 42(3): 680-685. |
| [11] | ZHANG Chuang, GUO Chen, ZHANG Daheng. Adaptive iterative particle filter and its application for ship integrated navigation [J]. Systems Engineering and Electronics, 2019, 41(4): 883-888. |
| [12] | GE Baoshuang, ZHANG Hai, JIN Yanqiong. Redundant measurement based method for online mitigation of GNSS multipath errors [J]. Systems Engineering and Electronics, 2019, 41(11): 2581-2587. |
| [13] | CHENG Jianhua, FAN Shilong, LI Liang, DONG Ping. Time synchronization technology of integrated navigation based on measurement correction [J]. Systems Engineering and Electronics, 2019, 41(10): 2328-2333. |
| [14] | GAO Junqiang, TANG Xiaqing, ZHANG Huan, WU Meng. Vehicle INS/GNSS/OD integrated navigation algorithm based on factor graph [J]. Systems Engineering and Electronics, 2018, 40(11): 2547-. |
| [15] | WANG Wei, GUO Huijie, MENG Yue. Satellite/pseudolite/INS integrated navigation algorithm [J]. Systems Engineering and Electronics, 2017, 39(2): 391-397. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||