Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (9): 2849-2857.doi: 10.12305/j.issn.1001-506X.2022.09.19
• Systems Engineering • Previous Articles Next Articles
Bi-level mission planning method for multi-cooperative UAV air-to-ground attack
Jing YU1, Enmi YONG1, Hanyang CHEN1, Dong HAO2,*, Xiancai ZHANG1
- 1. Computational Aerodynamics Institute, China Aerodynamics Research and Development Center, Mianyang 621000, China
2. Aerospace Technology Institute, China Aerodynamics Research and Development Center, Mianyang 621000, China
-
Received:2021-08-11Online:2022-09-01Published:2022-09-09 -
Contact:Dong HAO
CLC Number:
Cite this article
Jing YU, Enmi YONG, Hanyang CHEN, Dong HAO, Xiancai ZHANG. Bi-level mission planning method for multi-cooperative UAV air-to-ground attack[J]. Systems Engineering and Electronics, 2022, 44(9): 2849-2857.
share this article

Fig.1
Sketch map for multi-cooperative UAV air-to-ground attack"
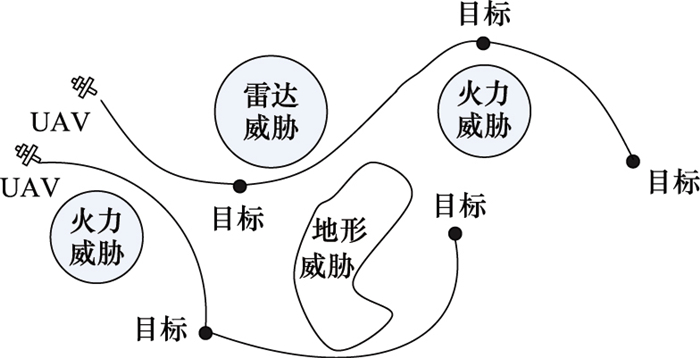
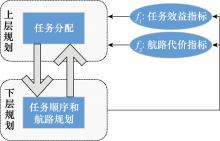
Fig.2
Bi-level mission planning framework"
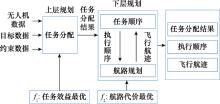
Fig.3
Strategy for Bi-level mission planning"
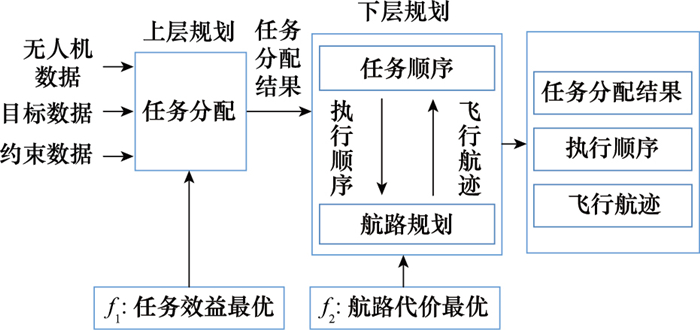

Fig.4
Example for encoding"


Fig.5
Neighborhood searching"

Fig.6
Flowchart for SAS"
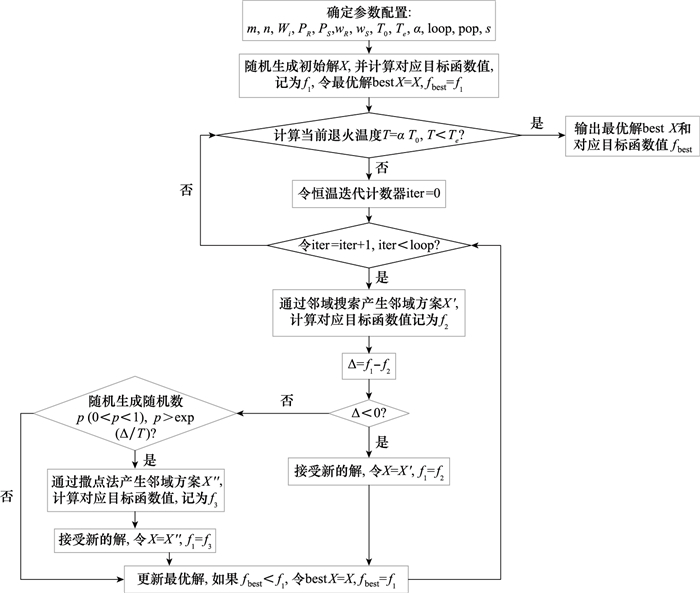
Table 1
Destructive probability"
| UAVi | tar1 | tar2 | tar3 | tar4 | tar5 | tar6 | tar7 | tar8 | tar9 | tar10 |
| UAV1 | 0.864 | 0.811 | 0.846 | 0.945 | 0.805 | 0.762 | 0.768 | 0.829 | 0.777 | 0.767 |
| UAV2 | 0.789 | 0.888 | 0.831 | 0.938 | 0.982 | 0.790 | 0.751 | 0.755 | 0.823 | 0.735 |
| UAV3 | 0.923 | 0.934 | 0.834 | 0.893 | 0.963 | 0.841 | 0.768 | 0.971 | 0.878 | 0.789 |
| UAV4 | 0.757 | 0.724 | 0.792 | 0.814 | 0.865 | 0.769 | 0.831 | 0.994 | 0.779 | 0.796 |
| UAV5 | 0.906 | 0.979 | 0.853 | 0.943 | 0.887 | 0.953 | 0.793 | 0.832 | 0.881 | 0.827 |
| UAV6 | 0.755 | 0.933 | 0.853 | 0.860 | 0.876 | 0.758 | 0.977 | 0.733 | 0.913 | 0.852 |
Table 2
Survival probability"
| UAVi | tar1 | tar2 | tar3 | tar4 | tar5 | tar6 | tar7 | tar8 | tar9 | tar10 |
| UAV1 | 0.732 | 0.725 | 0.755 | 0.865 | 0.821 | 0.825 | 0.801 | 0.773 | 0.873 | 0.713 |
| UAV2 | 0.989 | 0.820 | 0.779 | 0.743 | 0.723 | 0.715 | 0.970 | 0.821 | 0.718 | 0.751 |
| UAV3 | 0.701 | 0.778 | 0.744 | 0.956 | 0.772 | 0.971 | 0.811 | 0.729 | 0.770 | 0.895 |
| UAV4 | 0.932 | 0.940 | 0.741 | 0.887 | 0.737 | 0.983 | 0.733 | 0.740 | 0.806 | 0.920 |
| UAV5 | 0.945 | 0.829 | 0.961 | 0.805 | 0.755 | 0.847 | 0.934 | 0.983 | 0.946 | 0.894 |
| UAV6 | 0.961 | 0.973 | 0.874 | 0.854 | 0.772 | 0.847 | 0.817 | 0.987 | 0.705 | 0.835 |
Table 3
Parameter configuration for SA algorithm"
| 参数 | 数值 |
| 起始温度 | 250 |
| 终止温度 | 10 |
| 降温系数 | 0.99 |
| 常温迭代次数 | 250 |
| 邻域搜索位置数目 | 1, 3, 5, 10 |
| 撒点算子规模 | 5, 10, 50, 100 |
Table 4
Optimization results with different neighborhood searching parameters"
| 运行 | 1 | 2 | 3 | 4 | 5 | 均值 | 方差 |
| 1 | 4.025 0 | 4.025 0 | 4.003 5 | 3.987 0 | 3.963 0 | 4.000 7 | 0.000 699 |
| 3 | 4.003 5 | 3.981 5 | 4.025 0 | 3.997 5 | 4.025 0 | 4.006 5 | 0.000 350 |
| 5 | 4.003 5 | 3.997 5 | 3.977 5 | 3.973 5 | 3.973 5 | 3.985 1 | 0.000 205 |
| 10 | 3.960 0 | 3.997 5 | 3.988 5 | 3.957 5 | 3.979 0 | 3.976 5 | 0.000 306 |
Table 5
Optimization results with different shooting populations"
| 运行 | 1 | 2 | 3 | 4 | 5 | 均值 | 方差 |
| 5 | 3.940 0 | 3.952 0 | 3.948 0 | 3.956 0 | 3.959 5 | 3.951 1 | 0.000 057 |
| 10 | 3.973 5 | 3.961 5 | 3.968 5 | 3.988 5 | 3.987 0 | 3.975 8 | 0.000 137 |
| 50 | 4.003 5 | 3.981 5 | 4.025 0 | 3.997 5 | 4.025 0 | 4.006 5 | 0.000 350 |
| 100 | 3.979 0 | 3.997 5 | 4.003 5 | 4.025 0 | 4.025 0 | 4.006 0 | 0.000 382 |
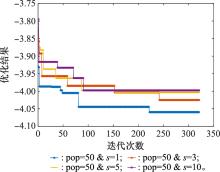
Fig.7
Convergence process with different neighborhood searching parameters"
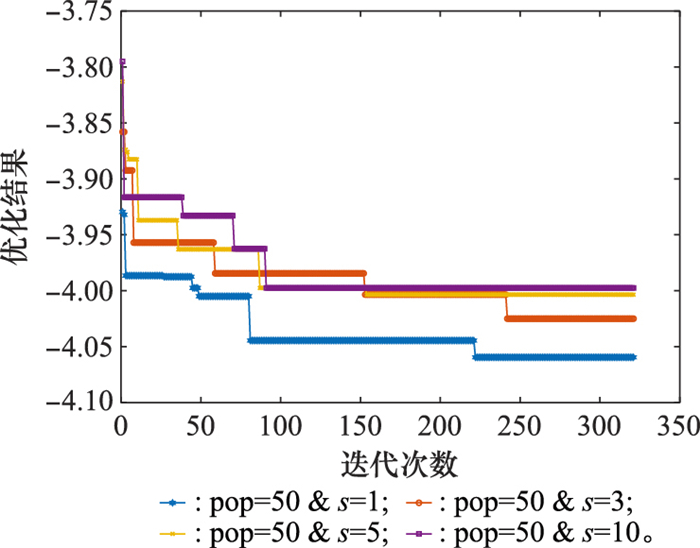

Fig.8
Convergence process with different shooting populations"

Fig.9
Convergence process for different algorithms"
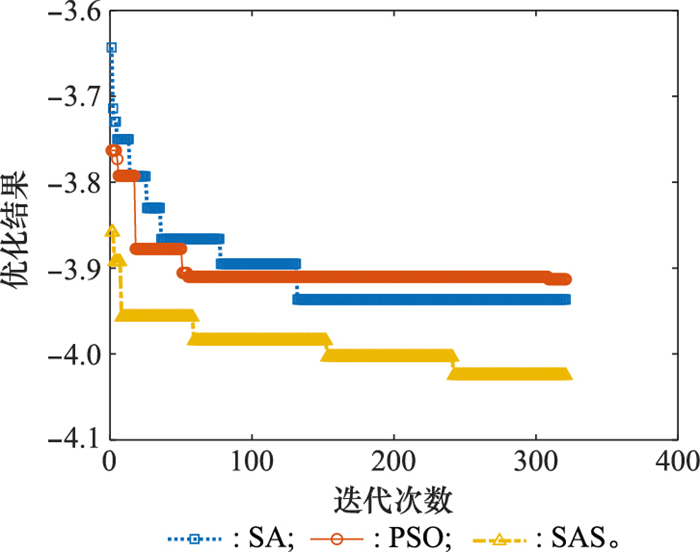
Table 6
Optimal results for assignment"
| UAVi | 任务集合 |
| UAV1 | 4 |
| UAV2 | 5 |
| UAV3 | 6 |
| UAV4 | 10 |
| UAV5 | 1, 3, 8, 9 |
| UAV6 | 2, 7 |
Table 7
Coordinates for targets"
| 坐标 | tar1 | tar2 | tar3 | tar4 | tar5 | tar6 | tar7 | tar8 | tar9 | tar10 |
| X/km | 5 | 20 | 30 | 40 | 50 | 55 | 10 | 50 | 40 | 20 |
| Y/km | 50 | 30 | 40 | 10 | 50 | 20 | 55 | 10 | 55 | 56 |
Table 8
Distribution for threats"
| 威胁类型 | 编号 | 坐标(x, y)/km | 威胁半径/km |
| 雷达探测威胁 | 1 | (26, 55) | 5 |
| 雷达探测威胁 | 2 | (35, 26) | 4 |
| 导弹威胁 | 3 | (10, 30) | 6 |
| 导弹威胁 | 4 | (14, 46) | 4 |
| 气候威胁 | 5 | (24, 10) | 6 |
| 地形威胁 | 6 | (52, 40) | 2 |
Table 9
Enumeration results for mission sequences"
| UAVi | 任务集合 | 任务序列枚举 |
| UAV1 | 4 | 4(一种组合) |
| UAV2 | 5 | 5(一种组合) |
| UAV3 | 6 | 6(一种组合) |
| UAV4 | 10 | 10(一种组合) |
| UAV5 | 1, 3, 8, 9 | 24种组合 |
| UAV6 | 2, 7 | (2, 7)和(7, 2)两种组合 |
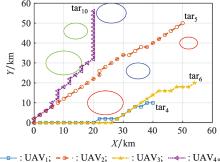
Fig.10
Trajectories for UAV1~UAV4"

Fig.11
Trajectory for UAV6 attacking targets [2, 7]"
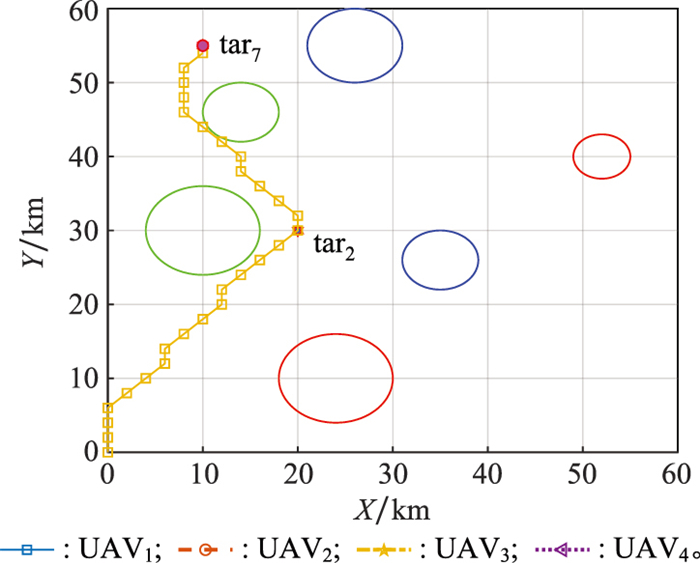
Fig.12
Trajectory for UAV6 attacking targets [7, 2]"


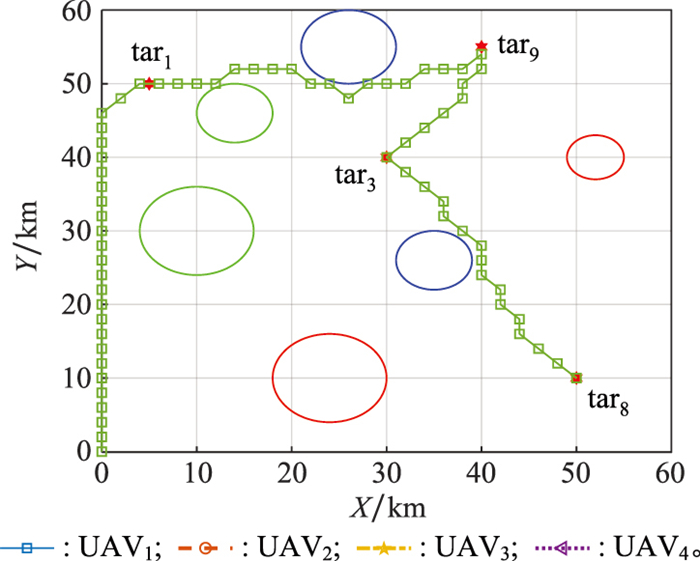
Fig.13
Trajectory for UAV5"
| 1 | 沈林成, 陈璟, 王楠. 飞行器任务规划技术综述[J]. 航空学报, 2014, 35 (3): 539- 606. |
| SHEN L C , CHEN J , WANG N . Overview of air vehicle mission planning techniques[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35 (3): 539- 606. | |
| 2 |
ALEMAYEHU T S , KIM J H . Efficient nearest neighbor heuristic TSP algorithms for blueucing data acquisition latency of UAV relay WSN[J]. Wireless Personal Communications, 2017, 95 (3): 3271- 3285.
doi: 10.1007/s11277-017-3994-9 |
| 3 | 杜于飞, 覃太贵, 邓秀方, 等. 多无人机协同任务规划问题[J]. 数学的实践和认识, 2017, 47 (14): 52- 62. |
| DU Y F , QIN T G , DENG X F , et al. Mission planning of multiple unmanned aerial vehicles[J]. Mathematics in Practice and Theory, 2017, 47 (14): 52- 62. | |
| 4 | 侯玉梅, 贾震环, 田歆, 等. 带软时间窗整车物流配送路径优化研究[J]. 系统工程学报, 2015, 30 (2): 240- 250. |
| HOU Y M , JIA Z H , TIAN X , et al. Research on the optimization on the vehicle logistics distribution with soft time windows[J]. Journal of Systems Engineering, 2015, 30 (2): 240- 250. | |
| 5 |
ROURKE K P O , CARLTON W B , BAILEY T G , et al. Dynamic routing of unmanned aerial vehicles using reactive tabu search[J]. Military Operations Research, 2001, 6 (1): 5- 30.
doi: 10.5711/morj.6.1.5 |
| 6 | GUERRERO J A , BESTAOUI Y . UAV path planning for structure inspection in windy environments[J]. Journal of Intelligent and Robotic Systems, 2013, 69 (1/4): 297- 311. |
| 7 | SCHUMACHER C, CHANDLER P R, RASMUSSEN S R. Task allocation for wide area search munitions via network flow optimization[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2001: AIAA 2001-4147. |
| 8 | SCHUMACHER C, CHANDLER P R, RASMUSSEN S R. Task allocation for wide area search munitions via iterative network flow[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2002: AIAA 2002-4586. |
| 9 |
梁国伟, 王社伟, 赵雪森. 多无人机协同任务分配方法[J]. 火力与指挥控制, 2014, 39 (11): 13- 17.
doi: 10.3969/j.issn.1002-0640.2014.11.004 |
|
LIANG G W , WANG S W , ZHAO X S . Method research on cooperative task allocation for multiple UCAVs[J]. Fire Control and Command Control, 2014, 39 (11): 13- 17.
doi: 10.3969/j.issn.1002-0640.2014.11.004 |
|
| 10 | 李大东, 孙秀霞, 孙彪, 等. 基于混合整数线性规划的无人机任务规划[J]. 飞行力学, 2010, 28 (5): 88- 91. |
| LI D D , SUN X X , SUN B , et al. Mission planning for UAVs based on MILP[J]. Flight Dynamics, 2010, 28 (5): 88- 91. | |
| 11 | ALIGHANBARI M, HOW J P. Cooperative task assignment of unmanned aerial vehicles in adversarial environments[C]//Proc. of the American Control Conference, 2005: 4661-4666. |
| 12 | CORMEN T H , LEISERSON C E , RIVEST R L , et al. Introduction to algorithms[M]. Massachusetts: MIT Press, 2009. |
| 13 | CHOI H , KIM Y , KIM H J . Genetic algorithm based decentralized task assignment for multiple unmanned aerial vehicles in dynamic environments[J]. International Journal of Aeronautical and Space Sciences, 2011, 12 (12): 163- 174. |
| 14 | ROBERGE V , TARBOUCHI M , LABONTE G . Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning[J]. Trans.on Industrial Informatics, 2012, 9 (1): 132- 141. |
| 15 | 马华伟, 朱益民, 胡笑旋. 基于粒子群算法的无人机舰机协同任务规划[J]. 系统工程与电子技术, 2016, 38 (7): 1583- 1588. |
| MA H W , ZHU Y M , HU X X . Cooperative task planning for ship and UAVs based on particle swarm optimization algorithm[J]. Systems Engineering and Electronics, 2016, 38 (7): 1583- 1588. | |
| 16 | 杜继永, 张凤鸣, 杨骥, 等. 多UCAV协同任务分配模型及粒子群算法求解[J]. 控制与决策, 2012, 27 (11): 1752- 1755. |
| DU J Y , ZHANG F M , YANG J , et al. Cooperative task assignment for multiple UCAV using particle swarm optimization[J]. Control and Decision, 2012, 27 (11): 1752- 1755. | |
| 17 |
王强, 丁全心, 张安, 等. 多机协同对地攻击目标分配算法[J]. 系统工程与电子技术, 2012, 34 (7): 1400- 1405.
doi: 10.3969/j.issn.1001-506X.2012.07.18 |
|
WANG Q , DING Q X , ZHANG A , et al. Target allocation algorithm for multi-coorperative air-to-ground attack[J]. Systems Engineering and Electronics, 2012, 34 (7): 1400- 1405.
doi: 10.3969/j.issn.1001-506X.2012.07.18 |
|
| 18 | GLOBUS A, CRAWFORD J, LOHN J, et al. A comparison of techniques for scheduling earth observing satellites[C]//Proc. of the National Conference on Artificial Intelligence and the 16th Conference on Innovative Applications on Artificial Intelligence, 2004: 836-843. |
| 19 |
WU G H , WANG H L , PEDRYCZ W , et al. Satellite observation scheduling with a novel adaptive simulated annealing algorithm and a dynamic task clustering strategy[J]. Compu-ters and Industrial Engineering, 2017, 113, 576- 588.
doi: 10.1016/j.cie.2017.09.050 |
| [1] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [2] | Yong ZHANG, Changjiu LI, Xichao SU, Rongwei CUI. Maintenance task scheduling of carrier-based aircraft fleet in hangar based on HTLBO algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2858-2868. |
| [3] | Jianfeng YANG, Heye XIAO, Liang LI, Junqiang BAI, Weihao DONG. Multi-level module partition method of UAV based on fuzzy clustering and expert scoring mechanism [J]. Systems Engineering and Electronics, 2022, 44(8): 2530-2539. |
| [4] | Jianlei ZHAO, Haiyang LI. Maneuvering identification method of non-cooperative aircraft based onsparse orbit information [J]. Systems Engineering and Electronics, 2022, 44(6): 1950-1956. |
| [5] | Jiawei ZHANG, Fengchen QIAN, Junqiang YANG, Qian ZHAO, Zhengrong ZHANG. Survey on routing and spectrum allocation algorithm in elastic optical networks [J]. Systems Engineering and Electronics, 2022, 44(6): 2001-2010. |
| [6] | Yuanjie LU, Zhimin LIU, Zhixiao SUN, Dong KAN. Model-based integrated evaluation of UAV system architecture [J]. Systems Engineering and Electronics, 2022, 44(4): 1239-1245. |
| [7] | Yuanyuan ZHANG, Yang GAO, Peng ZHU, Jintao LIU, Shushan GU. UAV reconnaissance tactical planning based on colored Petri nets [J]. Systems Engineering and Electronics, 2022, 44(3): 900-907. |
| [8] | Xuping GU, Daquan TANG. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm [J]. Systems Engineering and Electronics, 2022, 44(3): 967-976. |
| [9] | Xueyong YU, Ye ZHU, Lixiang QIU, Hongbo ZHU. Energy efficient offloading strategy for UAV aided edgecomputing systems [J]. Systems Engineering and Electronics, 2022, 44(3): 1022-1029. |
| [10] | Xingjia YANG, Keqing DUAN, Xiang LI, Wei QI. Resolving range ambiguity for cooperative detection using UAV swarms [J]. Systems Engineering and Electronics, 2022, 44(2): 480-489. |
| [11] | Xiaowei FU, Jing PAN. Distributed formation control of UAV swarm with dynamic obstacle avoidance [J]. Systems Engineering and Electronics, 2022, 44(2): 529-537. |
| [12] | Dou CHEN, Xiuyun MENG. UAV offline path planning based on self-adaptive coyote optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(2): 603-611. |
| [13] | Buhua LIU, Dan DING, Liu YANG, Naiyang XUE, Zhongqian LIU. OFDM data transmission technology of UAV based on deep neural network [J]. Systems Engineering and Electronics, 2022, 44(2): 696-702. |
| [14] | Zhipeng WU, Ping ZHANG, Zhen LI, Lei HUANG, Chang LIU, Shuo GAO. Vegetation height inversion method based on light-weighted and small UAV-radar [J]. Systems Engineering and Electronics, 2022, 44(12): 3667-3675. |
| [15] | Yujia WANG, Wei FANG, Tao XU, Yingfu YU, Boyuan DENG. Intelligent decision-making model by unmanned aerial vehicles in sea-to-air confrontation based on genetic fuzzy trees [J]. Systems Engineering and Electronics, 2022, 44(12): 3756-3765. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||