Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (1): 262-269.doi: 10.12305/j.issn.1001-506X.2022.01.32
• Guidance, Navigation and Control • Previous Articles Next Articles
Research on SR-CH∞KF for projectile attitude measurement
Pingan ZHANG1, Wei WANG1,*, Min GAO2, Yi WANG2
- 1. Departmart Artillery Engineering, Shijiazhuang Campus of Army Engineering University, Shijiazhuang 050084, China
2. Departmart Missile Engineering, Shijiazhuang Campus of Army Engineering University, Shijiazhuang 050084, China
-
Received:2021-02-20Online:2022-01-01Published:2022-01-19 -
Contact:Wei WANG
CLC Number:
Cite this article
Pingan ZHANG, Wei WANG, Min GAO, Yi WANG. Research on SR-CH∞KF for projectile attitude measurement[J]. Systems Engineering and Electronics, 2022, 44(1): 262-269.
share this article
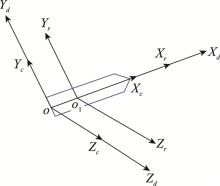
Fig.1
Installation method of sensor"
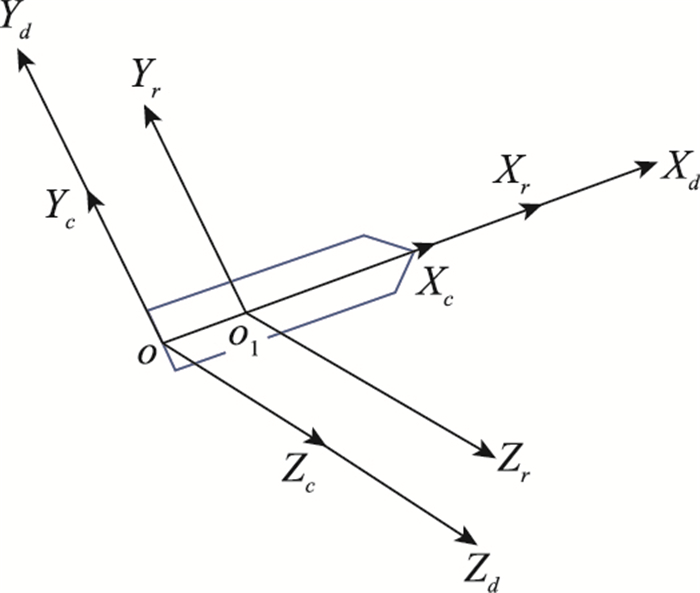
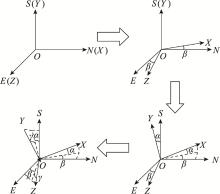
Fig.2
Coordinate systems conversion mode"
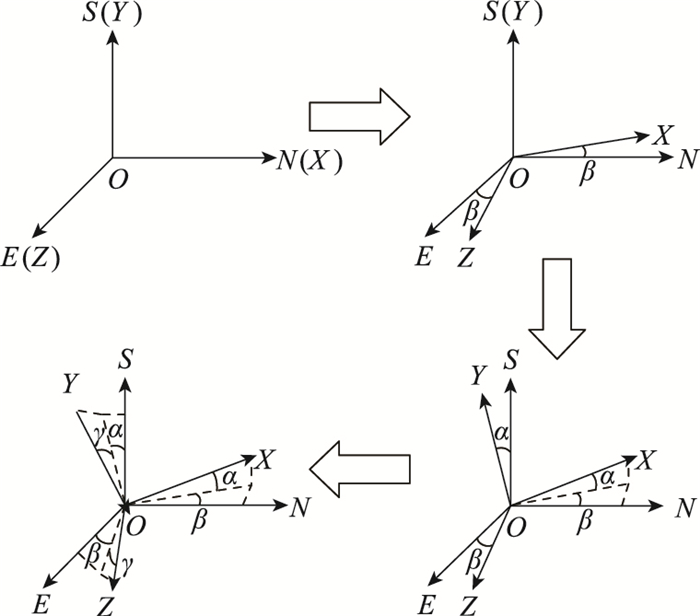
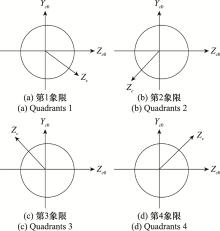
Fig.3
Diagram of rolling angle quadrants"
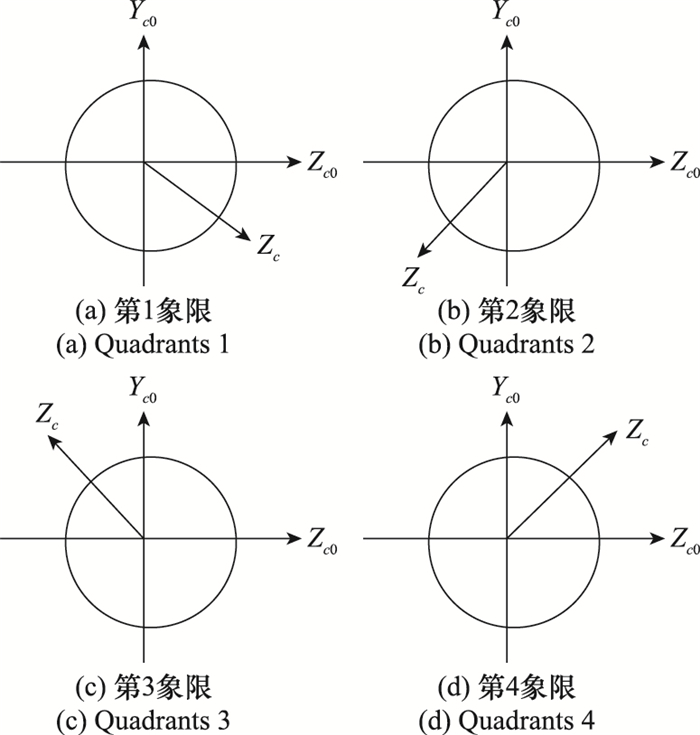
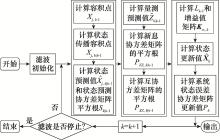
Fig.4
SR-CH∞KF flow chart"
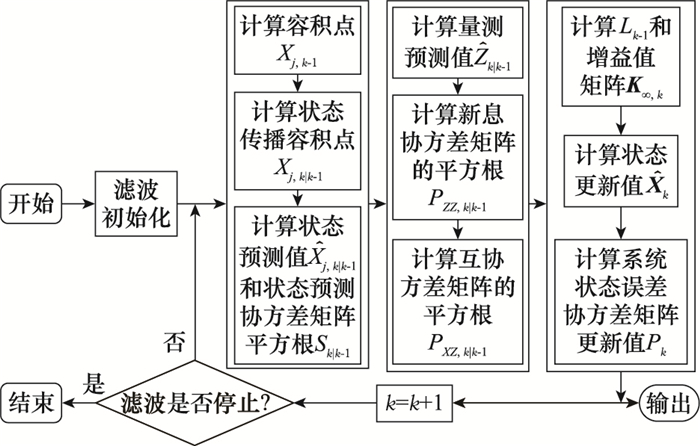
Table 1
Geomagnetic parameters"
| 符号 | 内容 | 数值 |
| I/(°) | 磁倾角 | -48.17 |
| D/(°) | 磁偏角 | 2.32 |
| B/nT | 磁场强度 | 50 986.1 |
Table 2
Simulation conditions"
| 内容 | 数值 |
| 初始俯仰角/(°) | 45 |
| 初始偏航角/(°) | 30 |
| 初始滚转角/(°) | 0 |
| 发射速度/(m/s) | 897 |
| 飞行距离/m | 27 126.4 |
| 飞行时间/s | 87.5 |
| 采样时间间隔/s | 0.1 |
| 飞行最高高度/m | 9 377 |
| 三轴陀螺仪传感器/(°/s) | 0.01 |
| 三轴地磁传感器/V | 0.1 |
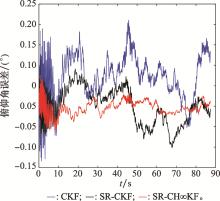
Fig.5
Schematic diagram of pitch angle error comparison"
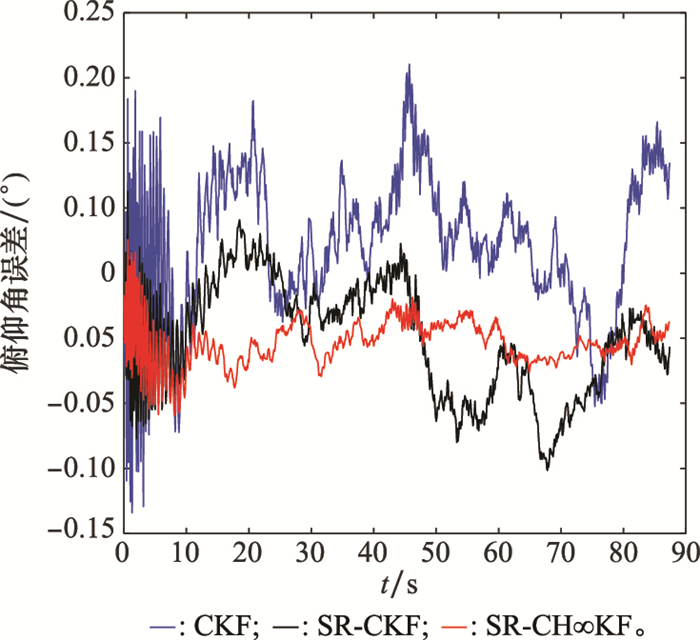
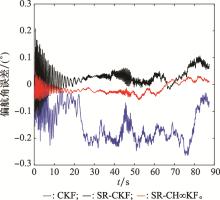
Fig.6
Comparison diagram of yaw angle error"

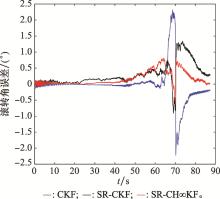
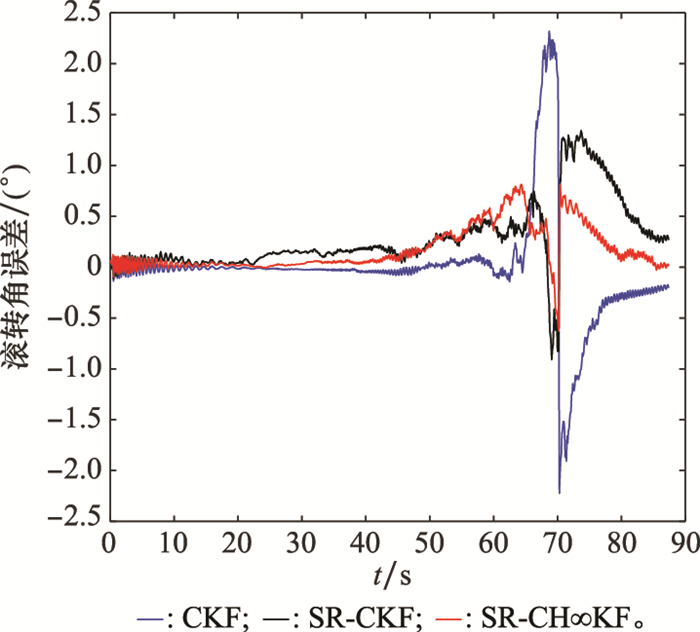
Fig.7
Comparison diagram of roll angle error"
| 1 |
ZHANG L J , YANG H B , LU H P , et al. Cubature Kalman filtering for relative spacecraft attitude and position estimation[J]. Acta Astronautica, 2014, 105 (1): 254- 64.
doi: 10.1016/j.actaastro.2014.09.007 |
| 2 |
ZANETTI R , MAJJI M , BISHOP R H , et al. Norm-constrained Kalman filtering[J]. Journal of Guidance Control and Dynamics, 2009, 32 (5): 1458- 1465.
doi: 10.2514/1.43119 |
| 3 |
GARCIA R V , PARDAL P , KUGA H K , et al. Nonlinear filtering for sequential spacecraft attitude estimation with real data: cubature Kalman filter, unscented Kalman filter and extended Kalman filter[J]. Advances in Space Research, 2019, 63 (2): 1038- 1050.
doi: 10.1016/j.asr.2018.10.003 |
| 4 | BARITZHACK I Y , OSHMAN Y . Attitude determination from vector observations-quaternion estimation[J]. IEEE Trans.on Aerospace and Electronic Systems, 1985, 21 (1): 128- 136. |
| 5 |
MUHAMMAD W , AHSAN A . Airship aerodynamic model estimation using unscented Kalman filter[J]. Journal of Systems Engineering and Electronics, 2020, 31 (6): 1318- 1329.
doi: 10.23919/JSEE.2020.000102 |
| 6 |
JULIER S J , UHLMANN J K . Unscented filtering and nonli-near estimation[J]. Proceeding of the IEEE, 2004, 92 (3): 401- 422.
doi: 10.1109/JPROC.2003.823141 |
| 7 |
LIU C Y , SHUI P L , LI S . Unscented extended Kalman filter for target tracking[J]. Journal of Systems Engineering and Electronics, 2011, 22 (2): 188- 192.
doi: 10.3969/j.issn.1004-4132.2011.02.002 |
| 8 |
KNUDSEN T , LETH J . A new continuous discrete unscented Kalman filter[J]. IEEE Trans.on Automatic Control, 2019, 64 (5): 2198- 2205.
doi: 10.1109/TAC.2018.2867325 |
| 9 |
ARASARATNAM I , HAYKIN S . Cubature Kalman filters[J]. IEEE Trans.on Automatic Control, 2009, 54 (6): 1254- 1269.
doi: 10.1109/TAC.2009.2019800 |
| 10 |
HAO G , SUN S L . Distributed fusion cubature Kalman filters for nonlinear systems[J]. International Journal of Robust and Nonlinear Control, 2019, 29 (17): 5979- 5991.
doi: 10.1002/rnc.4709 |
| 11 | ZHANG Y G , XU G , LIU X . An improved SINS alignment method based on adaptive cubature Kalman filter[J]. Sensors, 2019, 19 (24): 3217- 3228. |
| 12 | YU Y J , ZHANG X , KHAN M S A . Attitude heading reference algorithm based on transformed cubature Kalman filter[J]. Mea-surement & Control, 2020, 53 (8): 1446- 1453. |
| 13 | QIU Z B , GUO L . Improved cubature Kalman filter for spacecraft attitude estimation[J]. IEEE Trans.on Instrumentation and Measurement, 2021, 70 (13): 3108- 3121. |
| 14 |
GENG J , XIA L , WU D . Attitude and heading estimation for indoor positioning based on the adaptive cubature Kalman filter[J]. Micromachines, 2021, 12 (1): 79- 89.
doi: 10.3390/mi12010079 |
| 15 |
TANG X J , LIU Z B , ZHANG J S . Square-root quaternion cubature Kalman filtering for spacecraft attitude estimation[J]. Acta Astronautica, 2012, 76, 84- 94.
doi: 10.1016/j.actaastro.2012.02.009 |
| 16 | HUANG W , XIE H S , SHEN C , et al. A robust strong tracking cubature Kalman filter for spacecraft attitude estimation with quaternion constraint[J]. Acta Astronautica, 2016, 121 (1): 53- 63. |
| 17 |
CHEN X M , ZHENG X L , WANG Z J , et al. Multi-frequency data fusion for attitude estimation based on multi-layer perception and cubature Kalman filter[J]. IEEE Access, 2020, 8, 144373- 144381.
doi: 10.1109/ACCESS.2020.3012984 |
| 18 |
LIU X , QU H , ZHAO J H , et al. Maximum correntropy square-root cubature Kalman filter with application to SINS/GPS integra-ted systems[J]. ISA Transactions, 2018, 80, 195- 202.
doi: 10.1016/j.isatra.2018.05.001 |
| 19 | 张浩为, 谢军伟, 葛佳昂, 等. 自适应CS模型的强跟踪平方根容积卡尔曼滤波算法[J]. 系统工程与电子技术, 2019, 41 (6): 1186- 1194. |
| ZHANG H W , XIE J W , GE J A , et al. Strong tracking square root cubature Kalman filter algorithm for adaptive CS model[J]. Systems Engineering and Electronics, 2019, 41 (6): 1186- 1194. | |
| 20 | THOMAS D, MOHIT V, CHRISTOPHE C, et al. Complementary filters shaping using H-infinity synthesis[C]//Proc. of the IEEE 7th International Conference on Control, Mechatronics and Automation, 2019: 459-464. |
| 21 |
LI Y K , DING L , JING Z L . Optimal-switched extended H-infinity filter for nonlinear systems with stochastic uncertainties[J]. International Journal of Robust and Nonlinear Control, 2020, 30 (7): 2850- 2870.
doi: 10.1002/rnc.4915 |
| 22 |
CHANDRA K P B , GU D W , POSTLETHWAITE I . A cubature H-infinity filter and its square-root version[J]. International Journal of Control, 2014, 87 (4): 764- 768.
doi: 10.1080/00207179.2013.856520 |
| 23 | SIBLEY G, SUKHATME G, MATTHIES L. The iterated sigma point kalman filter with applications to long range stereo[C]// Proc. of the Robotics: Science and Systems, 2006. |
| 24 |
常树茂, 王利, 弓楠. 基于地磁传感器的弹丸转数测试[J]. 弹箭与制导学报, 2011, 31 (5): 200- 215.
doi: 10.3969/j.issn.1673-9728.2011.05.058 |
|
CHANG S M , WANG L , GONG N . Measurement of projectile revolution based on geomagnetic sensor[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2011, 31 (5): 200- 215.
doi: 10.3969/j.issn.1673-9728.2011.05.058 |
|
| 25 |
SHEN C , ZHANG Y , GUO X T , et al. Seamless GPS/inertial navigation system based on self-learning square-root cubature Kalman filter[J]. IEEE Trans.on Industrial Electronics, 2021, 68 (1): 499- 508.
doi: 10.1109/TIE.2020.2967671 |
| 26 |
TEHRANI M , NARIMAN-ZADEH N , MASOUMNEZHAD M . Adaptive fuzzy hybrid unscented/H-infinity filter for state estimation of nonlinear dynamics problems[J]. Transactions of the Institute of Measurement and Control, 2019, 41 (6): 1676- 1685.
doi: 10.1177/0142331218787607 |
| 27 | SIMON D . Optimal state estimation: Kalman, H∞, and nonlinear approaches[M]. America: Wiley-Interscience, 2006. |
| 28 | 刘晓光, 胡静涛, 王鹤. 基于自适应H_∞滤波的组合导航方法研究[J]. 仪器仪表学报, 2014, 35 (5): 1013- 1021. |
| LIU X G , HU J T , WANG H . Based on adaptive research on the integrated navigation method of H_∞ filtering[J]. Chinese Journal of Scientific Instrument, 2014, 35 (5): 1013- 1021. | |
| 29 | 王松桂, 吴密霞, 贾忠贞. 矩阵不等式[M]. 2版. 北京: 科学出版社, 2006. |
| WANG S G , WU M X , JIA Z Z . Matrix inequality[M]. 2nd ed. Beijing: Science Press, 2006. | |
| 30 | 梁新宇, 吴建德, 黄国勇, 等. H_∞鲁棒自适应CKF算法在组合导航中的应用[J]. 计算机工程与应用, 2018, 54 (9): 256- 261. |
| LIANG X Y , WU J D , HUANG G Y , et al. Application of H_∞ robust adaptive CKF algorithm in integrated navigation[J]. Computer Engineering and Applications, 2018, 54 (9): 256- 261. |
| [1] | Zhongxing GAO, Bin PENG, Xiaowei CHEN, Yonggang ZHANG. Discrete sliding mode control for ellipse parameters of vibrating gyroscope [J]. Systems Engineering and Electronics, 2022, 44(1): 226-232. |
| [2] | Yadong CHEN, Zhongwen CHEN, Jianan WANG, Jiayuan SHAN. Cooperative guidance and control method based on air data sensor [J]. Systems Engineering and Electronics, 2020, 42(9): 2060-2065. |
| [3] | Qiuying WANG, Kaiyue LIU, Juan YIN. Research on error estimation of micro-gyroscope and location method based on BPNN for vehicle during GNSS outages [J]. Systems Engineering and Electronics, 2020, 42(5): 1139-1145. |
| [4] | GUO Xiaoting, SUN Changku, WANG Peng. Vision and inertial fusion attitude measurement based on diagonalization of matrix robust QCKF [J]. Systems Engineering and Electronics, 2018, 40(2): 402-408. |
| [5] | LI Zheng, ZHANG Zhili, ZHANG Wei, ZHOU Zhaofa, WANG Kunming. Outer field calibration for vehiclebased SINS based on extended observation [J]. Systems Engineering and Electronics, 2017, 39(5): 1113-1118. |
| [6] | MA Long, DAI Chaofan, PEI Xin, HUANG Chao, ZHANG Hongyan, SU Zhigang. Fault detection method for redundant configuration of MEMS gyroscope [J]. Systems Engineering and Electronics, 2017, 39(10): 2298-2304. |
| [7] | WANG Wei, DU Dong-zhen, ZHOU Jia-xin, ZHAO Qing. Control method of mismatched disturbances for MEMS triaxial gyroscope [J]. Systems Engineering and Electronics, 2016, 38(7): 1638-1643. |
| [8] | CHENG Jian-hua, QI Bing, ZHAO Lin. Design of compensation system for temperature drift errors of interferometric fiber optical gyroscopes [J]. Systems Engineering and Electronics, 2016, 38(6): 1383-1389. |
| [9] | LIU Jieyu, SHEN Qiang, LI Can, QIN Weiwei. Fusion method of MEMS gyro array signals based on optimal KF [J]. Systems Engineering and Electronics, 2016, 38(12): 2705-2710. |
| [10] | CHEN Zhi-xiang, TAN Li-long, CHEN Li-hua. Robust, time-suboptimal controller for damping systems of gyroscopes [J]. Systems Engineering and Electronics, 2016, 38(11): 2624-2629. |
| [11] | ZHOU Jie, LIANG Yan, WANG Xiao-xu, PAN Quan. Noise reduction of MEMS gyroscope based on MUBF algorithm [J]. Systems Engineering and Electronics, 2016, 38(11): 2457-2461. |
| [12] | WANG Ping, WANG Hua, REN Yuan. Measurement and control integrated method for spacecraft attitude based on MSCMGs with pyramid configuration [J]. Systems Engineering and Electronics, 2016, 38(1): 123-129. |
| [13] | LIU Jie-yu, YU Guo-qiang, YANG Jian-ye. High precision error compensation method for double-axis rotation modulated ring laser strapdown inertial navigation system [J]. Systems Engineering and Electronics, 2015, 37(1): 148-154. |
| [14] | LIU Zhen-bo, LI Si-hai, WANG Jue, ZHANG Ya-chong. Relative attitude matching method for transfer alignment [J]. Systems Engineering and Electronics, 2014, 36(8): 1619-1625. |
| [15] | WANG Wei, ZHAO Qing, WANG Ben, SUI Jun jie. Robust adaptive control for MEMS triaxial gyroscopewith sector input nonlinearities [J]. Systems Engineering and Electronics, 2014, 36(12): 2504-2509. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||