Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (1): 250-261.doi: 10.12305/j.issn.1001-506X.2022.01.31
• Guidance, Navigation and Control • Previous Articles Next Articles
Carrier landing control technology based on self-tuning MPC
Wei HAN1, Kaikai CUI1, Jie LIU2,*, Xinwei WANG3, Yong ZHANG1
- 1. School of Basic Sciences for Aviation, Naval Aviation University, Yantai 264001, China
2. War Research Institute, Academy of Military Sciences, Beijing 100850, China
3. Department of Engineering Mechanics, Dalian University of Technology, Dalian 116024, China
-
Received:2021-02-23Online:2022-01-01Published:2022-01-19 -
Contact:Jie LIU
CLC Number:
Cite this article
Wei HAN, Kaikai CUI, Jie LIU, Xinwei WANG, Yong ZHANG. Carrier landing control technology based on self-tuning MPC[J]. Systems Engineering and Electronics, 2022, 44(1): 250-261.
share this article
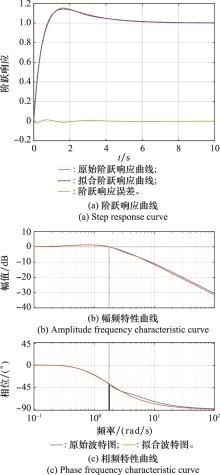
Fig.1
Analysis of fitting results"
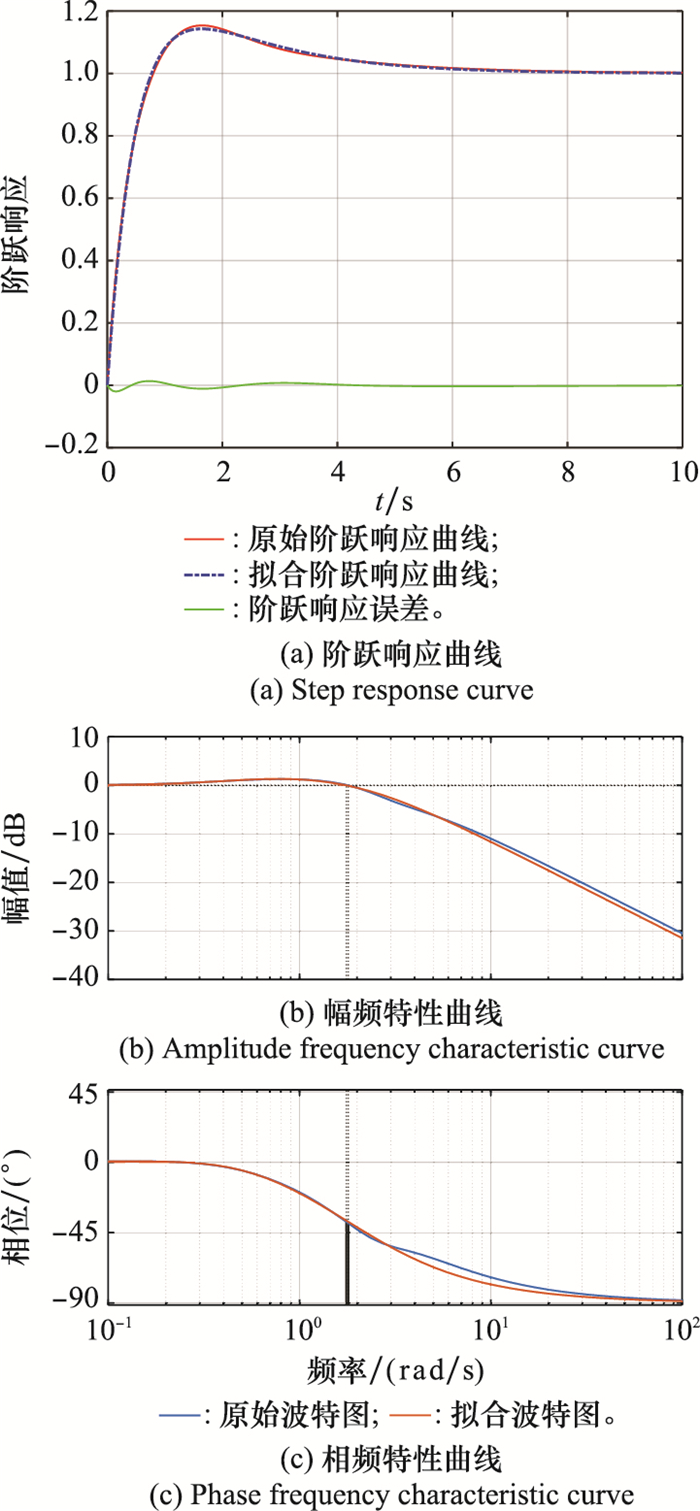
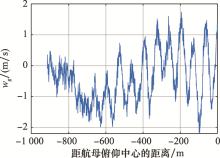
Fig.2
Simulation results of carrier air wake"

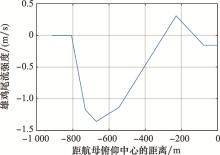
Fig.3
Strength of cocktail air wake"
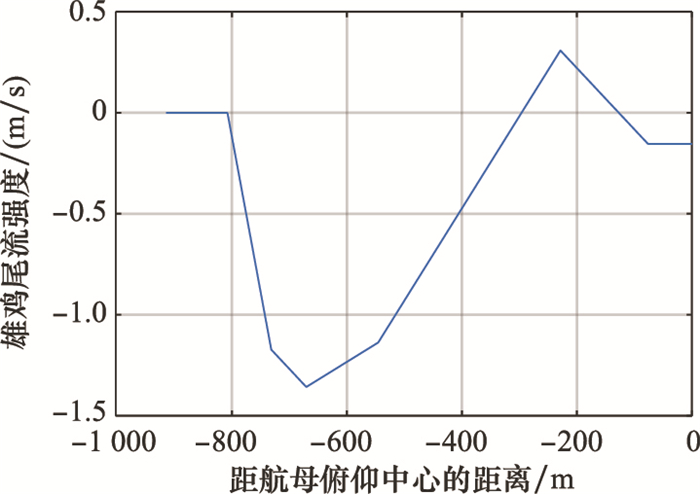
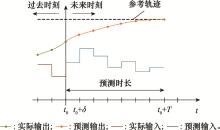
Fig.4
Schematic diagram of MPC"
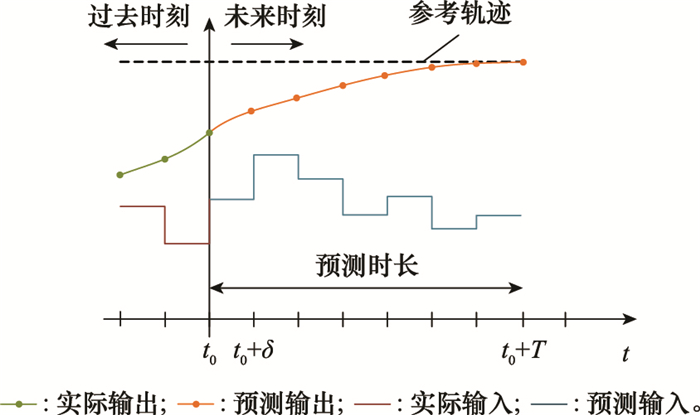
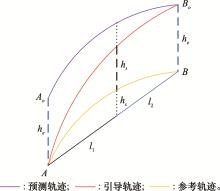
Fig.5
Schematic diagram of guidance trajectory design"
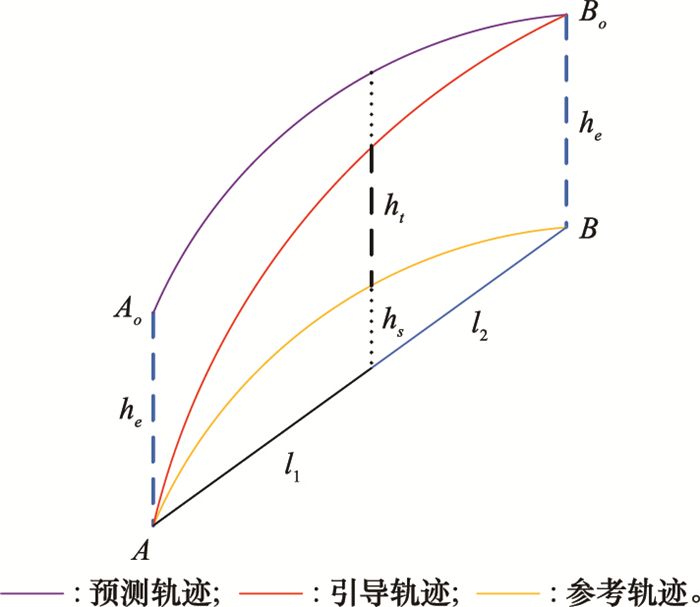
Fig.6
ST-MPC landing control system"
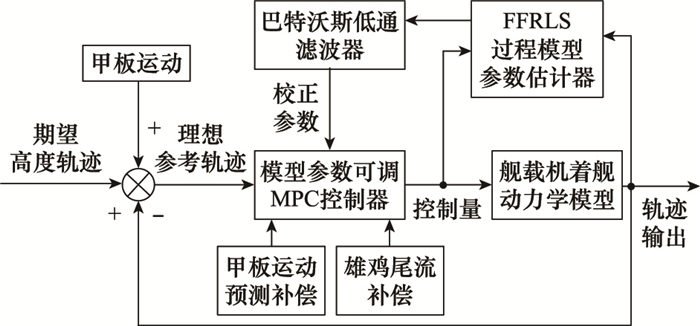
Table 1
Allowable range of variables in landing process"
| 状态/控制变量 | 取值约束 |
| ΔδH/(°) | [-12.14, 22.36] |
| ΔδLEF/(°) | [-20.6, 15.4] |
| ΔδRT/(°) | [-30, 30] |
| ΔδT/rad | [-0.254, 0.756] |
| [-40, 40] | |
| [-15, 15] | |
| [-56, 56] | |
| [-0.55, 0.55] |
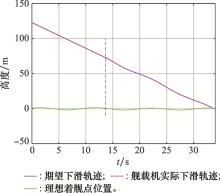
Fig.7
Tracking effect of glide path trajectory"

Fig.8
Tracking effect of deck motion trajectory"
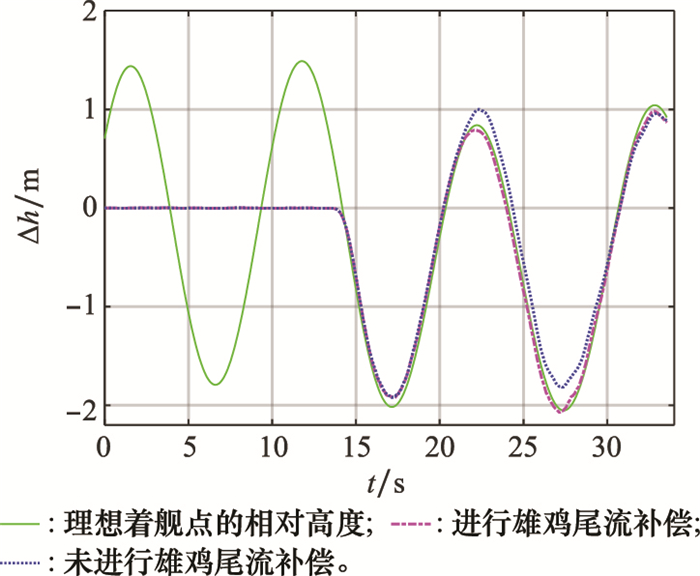
Fig.9
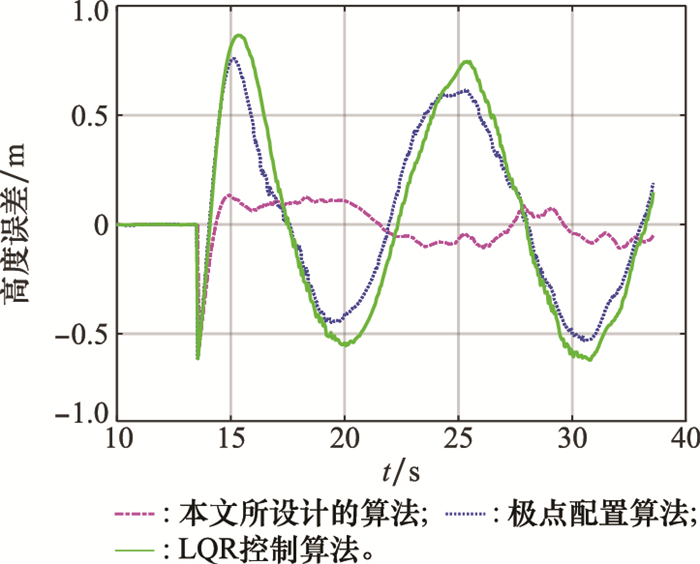
Tracking errors of glide path trajectory"
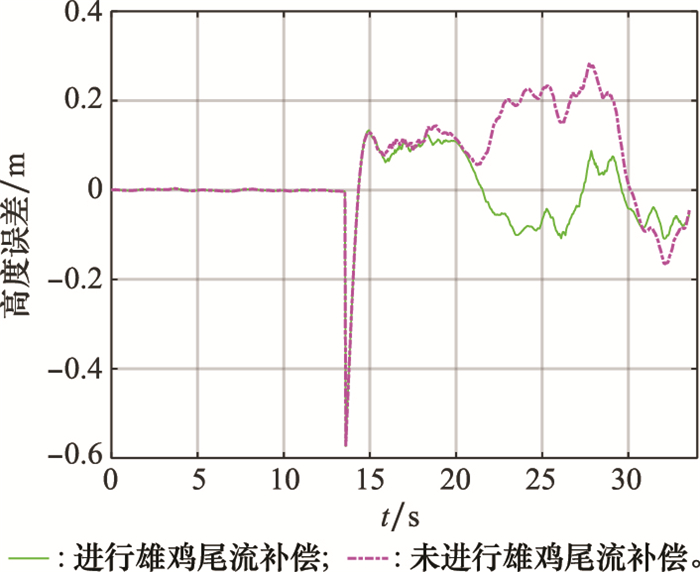
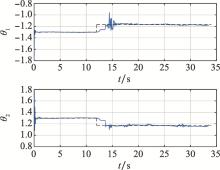
Fig.10
Estimation results of sensitive parameters"
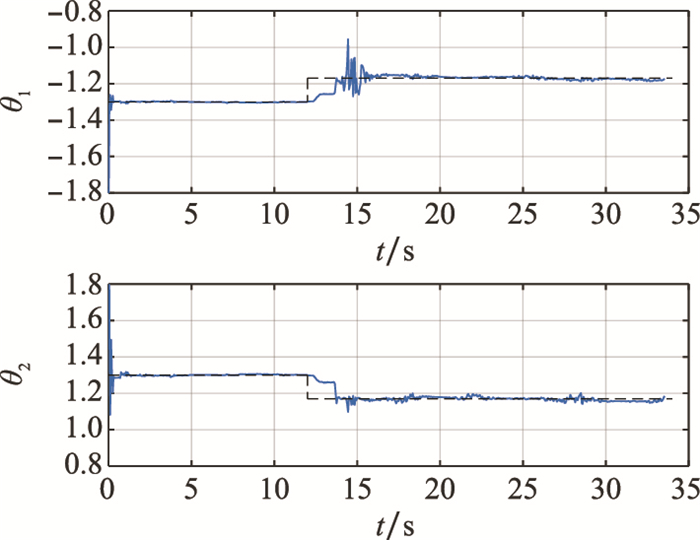

Fig.11
Simulation results of the relevant variables in the control process"
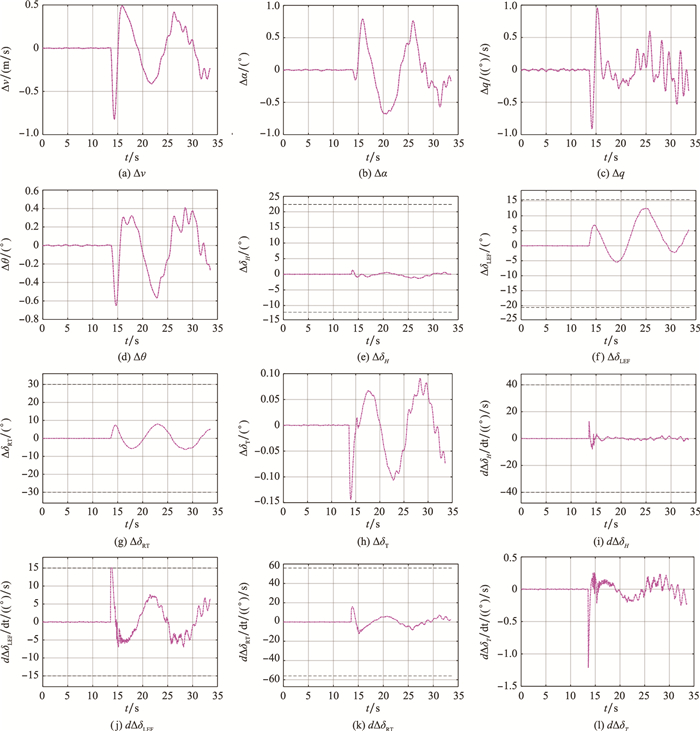

Fig.12
Tracking effect of deck motion trajectory (Comparison scenario Ⅰ)"
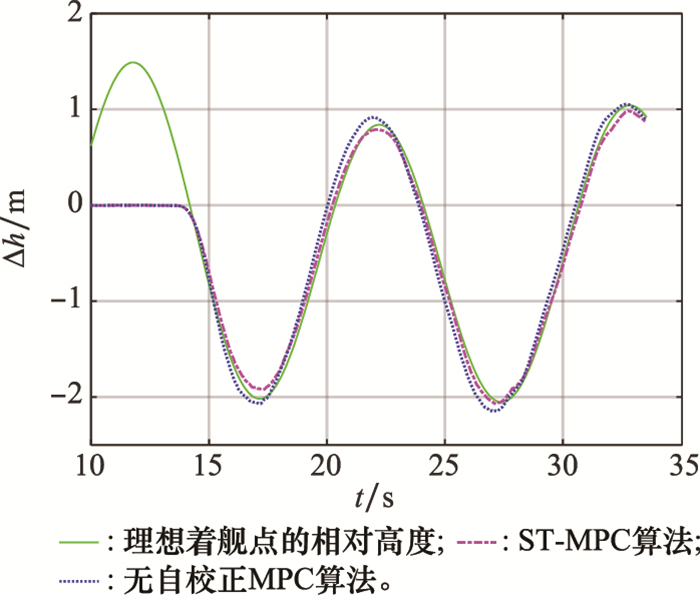
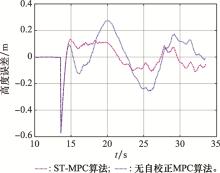
Fig.13
Tracking errors of glide path trajectory (Comparison scenario Ⅰ)"
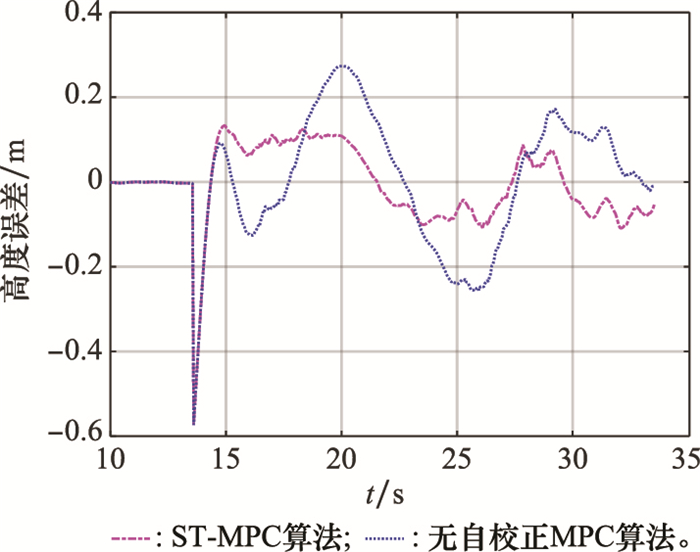
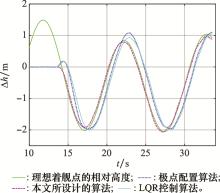
Fig.14
Tracking effect of deck motion trajectory (Comparison scenario Ⅱ)"

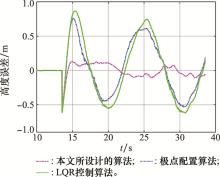
Fig.15
Tracking error of glide path trajectory (Comparison scenario Ⅱ)"
| 1 |
YANG Z Y , DUAN H B , FAN Y M , et al. Automatic carrier landing system multilayer parameter design based on cauchy mutation pigeon-inspired optimization[J]. Aerospace Science and Technology, 2018, 79, 518- 530.
doi: 10.1016/j.ast.2018.06.013 |
| 2 | 史青海. 舰载机着舰控制技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2006. |
| SHI Q H. Study on control technology for carrier aircraft landing[D]. Harbin: Harbin Engineering University, 2006. | |
| 3 | 倪灯塔. 舰载飞机动力补偿系统控制律设计研究[D]. 长春: 吉林大学, 2009. |
| NI D T. Research on aircraft carrier-based compensation system for flight control law design[D]. Changchun: Jilin University, 2009. | |
| 4 |
DENG Y M , DUAN H B . Control parameter design for automatic carrier landing system via pigeon-inspired optimization[J]. Nonlinear Dynamics, 2016, 85 (1): 97- 106.
doi: 10.1007/s11071-016-2670-z |
| 5 | DOU R , DUAN H B . Levy flight based pigeon-inspired optimization for control parameters optimization in automatic carrier landing system[J]. Aerospace Science and Technology, 2016, 61, 11- 20. |
| 6 |
刘强, 袁锁中. 基于TECS|H∞的无人机纵向着舰系统设计[J]. 安徽大学学报(自然科学版), 2011, 35 (1): 47- 51.
doi: 10.3969/j.issn.1000-2162.2011.01.010 |
|
LIU Q , YUAN S Z . Longitudinal carrier landing system design for UAV based on TECS|H∞[J]. Journal of Anhui University (Natural Science Edition), 2011, 35 (1): 47- 51.
doi: 10.3969/j.issn.1000-2162.2011.01.010 |
|
| 7 |
朱齐丹, 孟雪, 张智. 基于非线性动态逆滑模的纵向着舰系统设计[J]. 系统工程与电子技术, 2014, 36 (10): 2037- 2042.
doi: 10.3969/j.issn.1001-506X.2014.10.23 |
|
ZHU Q D , MENG X , ZHANG Z . Design of longitudinal carrier landing system using nonlinear dynamic inversion and sliding mode control[J]. Systems Engineering and Electronics, 2014, 36 (10): 2037- 2042.
doi: 10.3969/j.issn.1001-506X.2014.10.23 |
|
| 8 |
YU Y , WANG H L , LI N , et al. Automatic carrier landing system based on active disturbance rejection control with a novel parameters optimizer[J]. Aerospace Science and Technology, 2017, 69, 149- 160.
doi: 10.1016/j.ast.2017.06.026 |
| 9 |
DING B Z , WANG J Y , TANG X T . MPC-based offset-free tracking control for intermittent transonic wind tunnel[J]. IEEE Access, 2020, 8, 46909- 46916.
doi: 10.1109/ACCESS.2020.2977047 |
| 10 |
LI Y , SUN D F , ZHAO M Y , et al. MPC-based switched driving model for human vehicle co-piloting considering human factors[J]. Transportation Research Part C Emerging Technologies, 2020, 115, 102612.
doi: 10.1016/j.trc.2020.102612 |
| 11 | LIU L T , LIU Z L , ZHANG J . LMI-based model predictive control for underactuated surface vessels with input constraints[J]. Abstract and Applied Analysis, 2014, 32 (1): 673256. |
| 12 | WU C, LI S H, YANG J, et al. Disturbance observer based constrained multi-model predictive control for Mars entry trajectory tracking[C]//Proc. of the IEEE Chinese Guidance, Navigation and Control Conference, 2014: 2341-2346. |
| 13 |
LI H C , LIU S . Speed control for PMSM servo system using predictive functional control and extended state observer[J]. IEEE Trans.on Industrial Electronics, 2012, 59 (2): 1171- 1183.
doi: 10.1109/TIE.2011.2162217 |
| 14 |
王萌, 施艳艳, 沈明辉, 等. 三相电压型PWM整流器模型自校正预测控制[J]. 电工技术学报, 2014, 29 (8): 151- 157.
doi: 10.3969/j.issn.1000-6753.2014.08.019 |
|
WANG M , SHI Y Y , SHEN M H , et al. Predictive control of three-phase voltage source PWM rectifiers based on model self-correction[J]. Transactions of China Electrotechnical Society, 2014, 29 (8): 151- 157.
doi: 10.3969/j.issn.1000-6753.2014.08.019 |
|
| 15 |
RUBAGOTTI M , RAIMONDO D , FERRARA M A , et al. Robust model predictive control with integral sliding mode in continuous-time sampled-data nonlinear systems[J]. IEEE Trans.on Automatic Control, 2011, 56 (3): 556- 570.
doi: 10.1109/TAC.2010.2074590 |
| 16 | BAUMEISTER T , BRUNTON S L , KUTZ J N . Deep learning and model predictive control for self-tuning mode-locked lasers[J]. Journal of the Optical Society of America, B. Optical Physics, 2017, (11): 3214- 3227. |
| 17 | 刘丽丽, 左继红. 四旋翼飞行器的轨迹跟踪自校正预测控制[J]. 控制工程, 2020, 27 (10): 1838- 1844. |
| LIU L L , ZUO J H . Self-tuning trajectory tracking predictive control for four rotor aircraft[J]. Control engineering of China, 2020, 27 (10): 1838- 1844. | |
| 18 | 周帆, 刘辉. 基于无线电能传输的参数自校正电压控制策略[J]. 信息技术, 2020, 44 (10): 121- 126. |
| ZHOU F , LIU H . Parameter self correcting voltage control strategy based on wireless energy transmission[J]. Information Technology, 2020, 44 (10): 121- 126. | |
| 19 | SUBRAHMANYAM M B . H-infinity design of F/A-18A automatic carrier landing system[J]. Journal of Guidance, Control, and Dynamics, 1994, 18 (9): 1106- 1112. |
| 20 | 杨一栋. 舰载飞机着舰引导与控制[M]. 北京: 国防工业出版社, 2007. |
| YANG Y D . Guidance and control of carrier based aircraft landing[M]. Beijing: National Defense Industry Press, 2007. | |
| 21 | 宁昕, 武耀发. 自由漂浮空间机器人轨迹跟踪的模型预测控制[J]. 控制理论与应用, 2019, (5): 687- 696. |
| NING X , WU Y F . Model predictive control for trajectory tracking of free-floating space robot[J]. Control Theory and Application, 2019, (5): 687- 696. | |
| 22 |
WANG X W , PENG H J , ZHANG S , et al. A symplectic pseudospectral method for nonlinear optimal control problem with inequality constraints[J]. ISA Transactons, 2017, 68, 335- 352.
doi: 10.1016/j.isatra.2017.02.018 |
| 23 |
WANG X W , LIU J , SU X C , et al. A review on carrier aircraft dispatch path planning and control on deck[J]. Chinese Journal of Aeronautics, 2020, 33 (12): 3039- 3057.
doi: 10.1016/j.cja.2020.06.020 |
| 24 | 彭海军. 计算最优控制的保辛数值方法及其在平动点附近航天器控制中的应用[D]. 大连: 大连理工大学, 2012. |
| PENG H J. Symplectic numerical method for computational optimal control and its application in the control of spacecraft near the libration point[D]. Dalian: Dalian University of Technology, 2012. | |
| 25 | BAZARAA M S , SHERALI H D , SHETTY C M . Nonlinear programming: theory and algorithms[M]. 3rd ed Hoboken: Wiley, 2006. |
| 26 | PENG H J , WANG X W , SHI B Y , et al. Stabilizing constrained chaotic system using a symplectic psuedospectral method[J]. Communications in Nonlinear Science and Numerical Simulations, 2017, 56 (3): 77- 92. |
| 27 |
MENG Y L , WANG W , HAN H W , et al. A visual/inertial integrated landing guidance method for UAV landing on the ship[J]. Aerospace Science and Technology, 2019, 85, 474- 480.
doi: 10.1016/j.ast.2018.12.030 |
| 28 | STEVENS B , LEWIS F , JOHNSON E N . Aircraft control and simulation: dynamics, controls design, and autonomous systems[M]. 3rd ed Hoboken: Wiley, 2015. |
| 29 | 庞中华. 系统辨识与自适应控制Matlab仿真[M]. 北京: 北京航空航天大学出版社, 2017. |
| PANG Z H . Matlab simulation of system identification and adaptive control[M]. Beijing: Beijing University of Aeronautics and Astronautics Press, 2017. | |
| 30 | 段卓毅, 王伟, 耿建中, 等. 舰载机人工进场着舰精确轨迹控制技术[J]. 航空学报, 2019, 40 (4): 622328. |
| DUAN Z Y , WANG W , GENG J Z , et al. Precision trajectory manual control technologies for carrier-based aircraft approaching and landing[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40 (4): 622328. |
| [1] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [2] | Biao XU, Xiang LI, Shuang LI, Jinpeng ZHANG. Intelligent guidance method based on nonlinear model predictive control for Mars atmospheric entry [J]. Systems Engineering and Electronics, 2021, 43(7): 1943-1953. |
| [3] | Xiaohai WANG, Xiuyun MENG, Chuanxu LI. Design of trajectory tracking controller for UAV based on MPC [J]. Systems Engineering and Electronics, 2021, 43(1): 191-198. |
| [4] | Yu YANG, Da WU, Feng GAO, Jianjun DENG. Composite guidance law design method for super-low altitude engagement [J]. Systems Engineering and Electronics, 2021, 43(1): 208-215. |
| [5] | Zongxing LI, Rui ZHANG. Missile adaptive attitude control based on Riccati equation [J]. Systems Engineering and Electronics, 2020, 42(6): 1358-1365. |
| [6] | ZHU Mengyuan, LYU Na, CHEN Kefan, ZHONG Yun, LIU Chuang, GAO Weiting. Collaborative aeronautic swarm search of Markov moving targets [J]. Systems Engineering and Electronics, 2019, 41(9): 2041-2047. |
| [7] | SONG Min, DAI Jing, KONG Tao. UAV autonomous collision avoidance control method based on NMPC [J]. Systems Engineering and Electronics, 2019, 41(9): 2092-2099. |
| [8] | ZHAO Guorong, LIU Boyan, GAO Chao. Moving horizon estimation of UAV with random parameter ncertainty and data missing [J]. Systems Engineering and Electronics, 2019, 41(12): 2849-2854. |
| [9] | HAN Yunxia, MA Yizhong, OUYANG Linhan, WANG Jianjun, GU Xiaoguang. Multi-response parameters and tolerances concurrent design with model parameter uncertainty [J]. Systems Engineering and Electronics, 2019, 41(1): 131-140. |
| [10] | WANG Jianjun, TU Yanan. Optimal design for multiple responses considering predicted response variability [J]. Systems Engineering and Electronics, 2018, 40(8): 1794-1802. |
| [11] | WANG Tao, ZHANG Hongbo, TANG Guojian. Predictive attitude control for entry vehicles with compensation of extended states observer [J]. Systems Engineering and Electronics, 2018, 40(7): 1554-1559. |
| [12] | WANG Chao, ZHANG Shengxiu, SONG Zibiao, YANG Jianye, WU Xiaolu. Aircraft anti-windup of robust adaptive nonlinear predictive control [J]. Systems Engineering and Electronics, 2018, 40(2): 393-400. |
| [13] | WANG Wei, GUO Huijie, MENG Yue. Satellite/pseudolite/INS integrated navigation algorithm [J]. Systems Engineering and Electronics, 2017, 39(2): 391-397. |
| [14] | LI Tai, HOU Xiao-yan, LIN He-yun. Generalized predictive control based on Hammerstein-Wiener model [J]. Systems Engineering and Electronics, 2015, 37(8): 1874-1879. |
| [15] | GAI Jun-feng, ZHAO Guo-rong, SONG Chao. Model predictive control based on linearization and neural network approach [J]. Systems Engineering and Electronics, 2015, 37(2): 394-399. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||