Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (1): 218-225.doi: 10.12305/j.issn.1001-506X.2022.01.27
• Guidance, Navigation and Control • Previous Articles Next Articles
Design of carrier landing controller based on adaptive dynamic inversion
Shuangshuang WANG1, Chuntao LI1,*, Zhen WANG1, Zikang SU1, Fei DAI2
- 1. College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
2. Unit 94804 of the PLA, Shanghai 200434, China
-
Received:2021-03-08Online:2022-01-01Published:2022-01-19 -
Contact:Chuntao LI
CLC Number:
Cite this article
Shuangshuang WANG, Chuntao LI, Zhen WANG, Zikang SU, Fei DAI. Design of carrier landing controller based on adaptive dynamic inversion[J]. Systems Engineering and Electronics, 2022, 44(1): 218-225.
share this article

Fig.1
Relationship between steady-state flight speed and thrust"
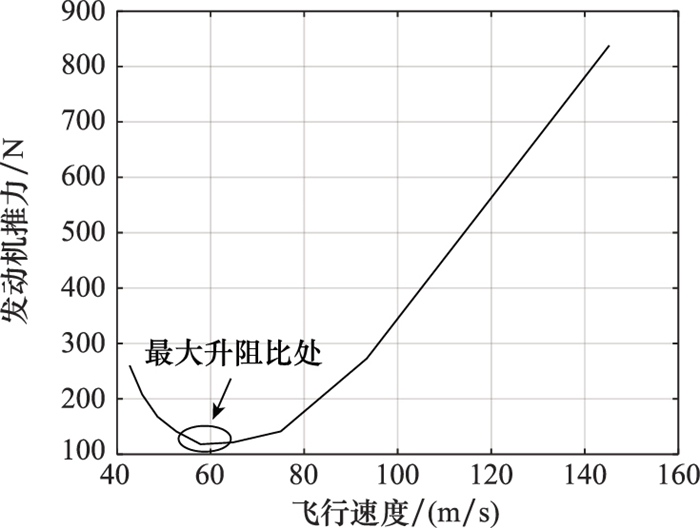
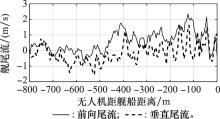
Fig.2
Composite curve of each component of carrier air wake"
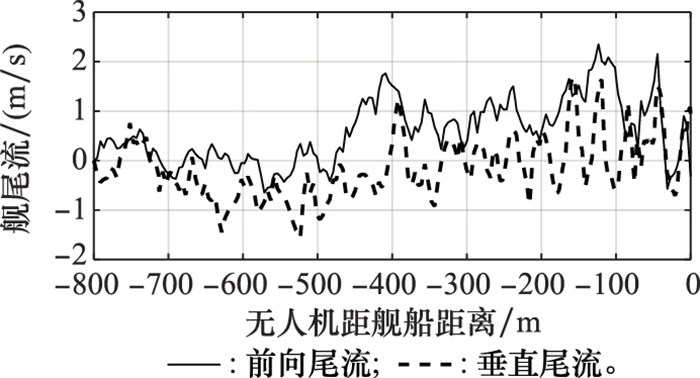

Fig.3
Pitch angle under constant wind disturbance"
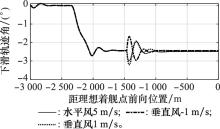
Fig.4
Absolute flight-path angle under constant wind disturbance"
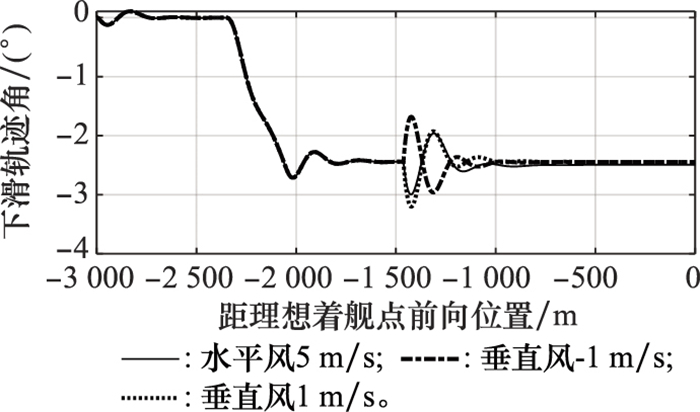
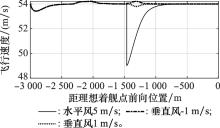
Fig.5
Flight speed under constant wind disturbance"
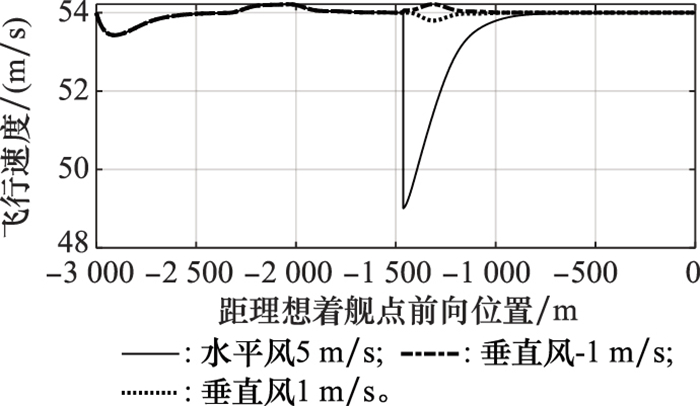

Fig.6
Throttle position under constant wind disturbance"
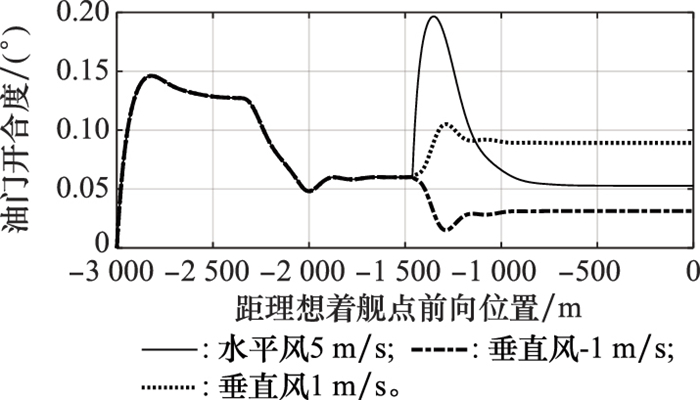
Fig.7
Elevator rudder deflection angle under constan wind disturbance"
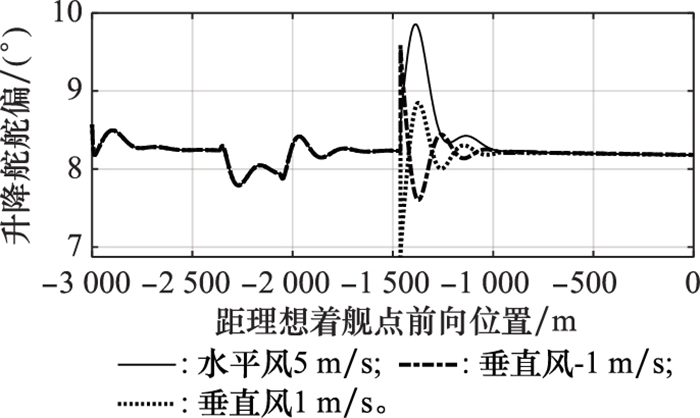
Fig.8
Pitch angle under carrier air wake interference"
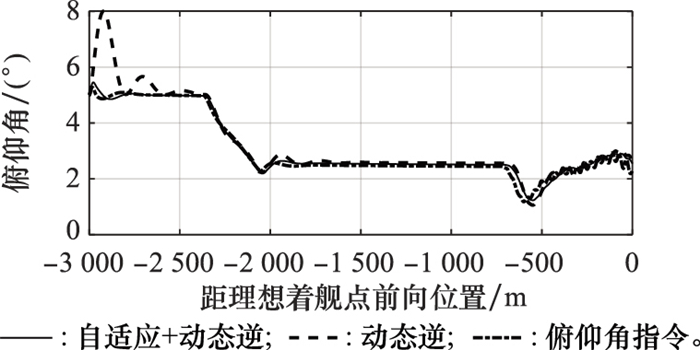
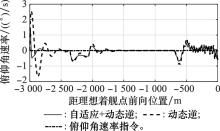
Fig.9
Pitch rate under carrier air wake interference"
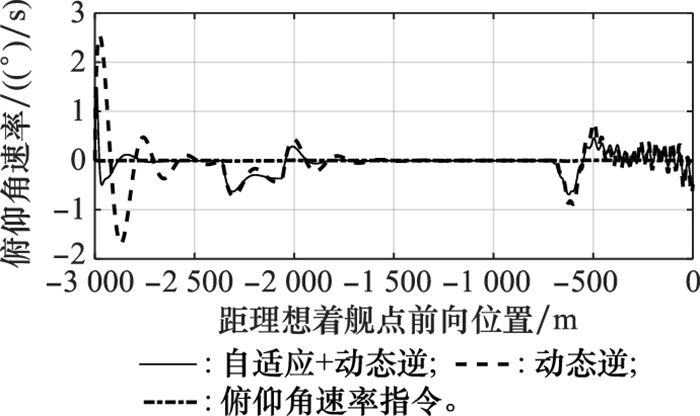

Fig.10
Flight speed under carrier air wake interference"

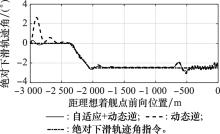
Fig.11
Absolute flight-path angle under carrier air wake interference"
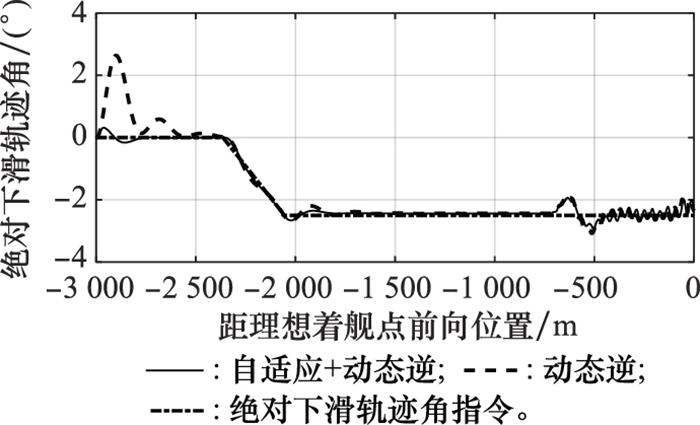

Fig.12
Throttle position under carrier air wake interference"
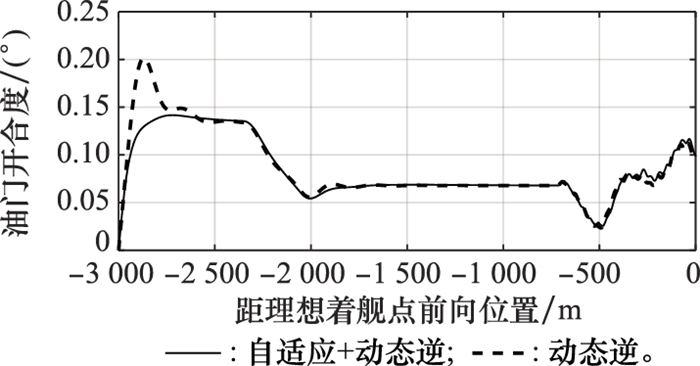
Fig.13
Elevator rudder deflection angle under carrier air wake interference"
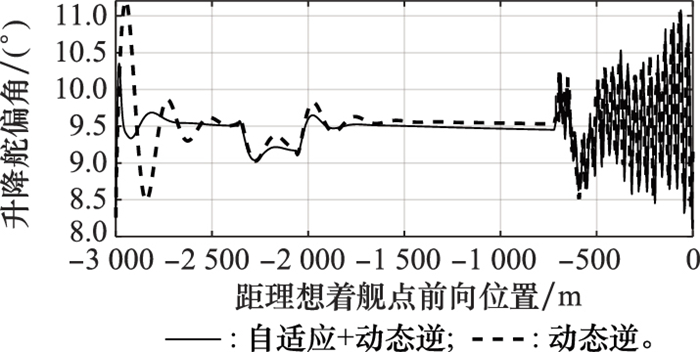

Fig.14
Parameter estimation curve"
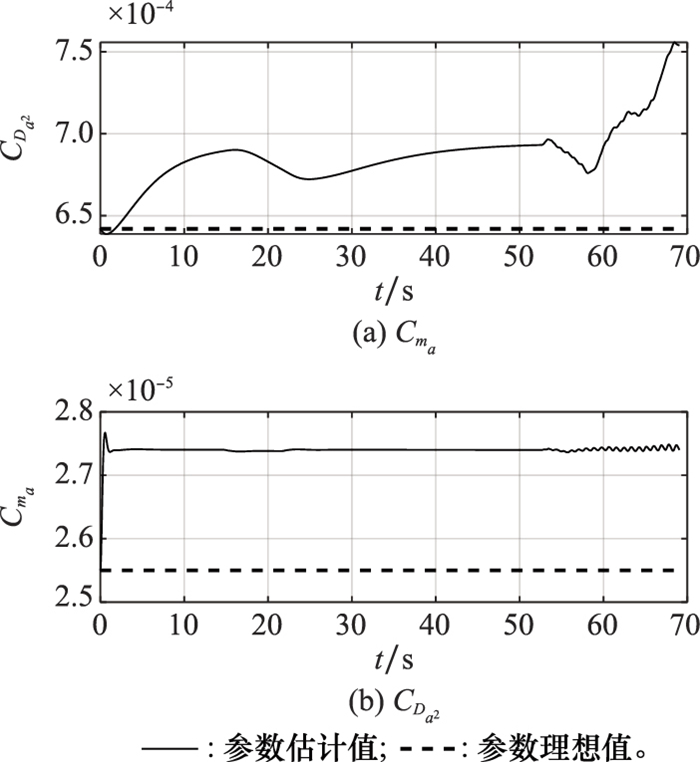
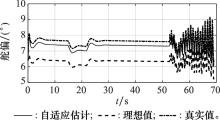
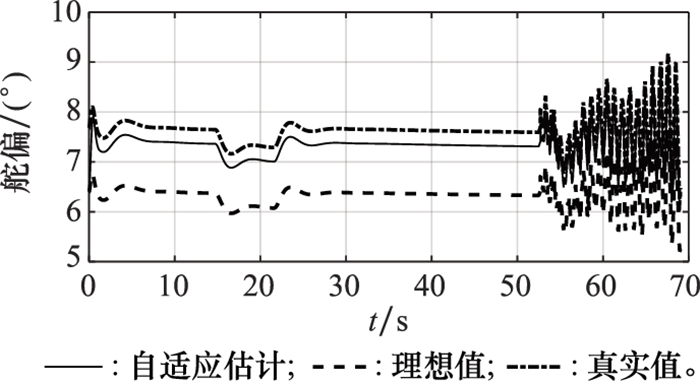
Fig.15
Elevator rudder deflection curve with parameter estimation item"
| 1 | 甄子洋, 王新华, 江驹. 舰载机自动着舰引导与控制研究进展[J]. 航空学报, 2017, 38 (2): 831- 834. |
| ZHEN Z Y , WANG X H , JIANG J . Research progress on automatic carrier landing guidance and control of carrier-based aircraft[J]. Journal of Aeronautics, 2017, 38 (2): 831- 834. | |
| 2 | 张志冰, 甄子洋. 舰载机自动着舰引导与控制综述[J]. 南京航空航天大学学报, 2018, 50 (6): 734- 736. |
| ZHANG Z B , ZHEN Z Y . A summary of automatic carrier landing guidance and control of carrier-based aircraft[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2018, 50 (6): 734- 736. | |
| 3 | BHATIA A K , JIANG J , KUMAR A , et al. Adaptive preview control with deck motion compensation for autonomous carrier landing of an aircraft[J]. International Journal of Adaptive Control and Signal Processing, 2021, 35 (8): 10- 11. |
| 4 | STEINBERG M L. Development and simulation of an F/A-18 fuzzy logic automatic carrier landing system[C]//Proc. of the IEEE 2nd International Conference on Fuzzy Systems, 1993. |
| 5 |
ZHENG F Y , GONG H J , ZHEN Z Y . Adaptive constraint backstepping fault-tolerant control for small carrier-based unmanned aerial vehicle with uncertain parameters[J]. Proc.of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2016, 230 (3): 407- 425.
doi: 10.1177/0954410015592169 |
| 6 | YUE L M, LIU G, HONG G X. Design and simulation of F/A-18A automation carrier landing guidance controller[C]//Proc. of the Modeling and Simulation Technologies Conference, 2016: 52-56. |
| 7 | 黄喜元, 王青, 董朝阳. 基于动态逆的高超声速飞行器鲁棒自适应控制[J]. 北京航空航天大学学报, 2011, 37 (5): 561- 563. |
| HUANG X Y , WANG Q , DONG Z Y . Robust adaptive control of hypersonic vehicle based on dynamic inversion[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37 (5): 561- 563. | |
| 8 | ZHEN Z Y , TAO G , YU C J , et al. A multivariable adaptive control scheme for automatic carrier landing of UAV[J]. Aerospace Science and Technology, 2019, (92): 714- 716. |
| 9 | FARHAN M , XUE Y X , ZHEN Z Y , et al. H∞ preview control for automatic carrier landing[J]. Transactions of Nanjing University of Aeronautics and Astronautics, 2019, 36 (6): 919- 926. |
| 10 | ZEGHLACHE S , SAIGAA D , KARA K . Fuzzy sliding mode control with chattering elimination for a quadrotor helicopter in vertical flight[J]. Hybrid Artificial Intelligenct Systems Lecture Notes in Computer Science, 2012, 72 (8): 125- 136. |
| 11 | TANG K H , WANG W , MENG Y F , et al. Flight control and airwake suppression algorithm for carrier landing based on model predictive control[J]. Transactions of the Institute of Measurement and Control, 2018, 41 (3): 2- 5. |
| 12 | LU K , LIU C S , CAVALIERI A . A L1 adaptive control scheme for UAV carrier landing using nonlinear dynamic inversion[J]. International Journal of Aerospace Engineering, 2019, (3): 4- 7. |
| 13 |
SWARNKAR S , KOTHARI M . A simplified adaptive backstepping control of aircraft lateral/directional dynamics[J]. IAFC-PapersOnline, 2016, 49 (1): 579- 584.
doi: 10.1016/j.ifacol.2016.03.117 |
| 14 | MACKUNIS W , PATRE P M , KAISER M K , et al. Asymptotic tracking for aircraft via robust and adaptive dynamic inversion methods[J]. IEEE Trans.on Control Systems Technology, 2010, 18 (6): 54- 63. |
| 15 | GAVLAN F, VAZQUEZ R, ACOSTA J A. Output-feedback control of the longitudinal flight dynamics using adaptive backstepping[C]//Proc. of the IEEE 50th Conference on Decision and Control and European Control Conference, Piscataway, 2011: 6858- 6863. |
| 16 | YU J L, HUA Y Z, YANG P. Robust adaptive attitude control for carrier based aircrafts in the landing process under the carrier air wake disturbance[C]//Proc. of the 36th Chinese Control Conference, 2017: 6-10. |
| 17 | 韩英华, 范彦铭. 基于非线性动态逆的无人机自动着陆控制系统[J]. 航空学报, 2008, 29 (S): 66- 72. |
| HAN Y H , FAN Y M . Automatic carrier landing control system of UAV based on nonlinear dynamic inversion[J]. Journal of Aeronautics, 2008, 29 (S): 66- 72. | |
| 18 | 黄得刚, 章卫国, 邵山. 舰载机自动着舰纵向控制系统设计[J]. 控制理论与应用, 2014, 31 (12): 1732- 1733. |
| HUANG D G , ZAHNG W G , SHAO S . Design of longitudinal control system for carrier-based aircraft's automatic landing[J]. Control Theory and Application, 2014, 31 (12): 1732- 1733. | |
| 19 | 张杨, 吴文海, 胡云安. 舰载无人机着舰轨迹跟踪鲁棒控制器设计[J]. 控制理论与应用, 2018, 35 (4): 558- 561. |
| ZHANG Y , WU W H , HU Y A . Design of robust controller for carrier-based UAV landing trajectory tracking[J]. Control Theory and Application, 2018, 35 (4): 558- 561. | |
| 20 |
FRANCISCO G , RAFAEL V . Adaptive control for aircraft longitudinal dynamics with thrust saturation[J]. Journal of Guidance, Control, and Dynamics, 2015, 38 (4): 651- 661.
doi: 10.2514/1.G000028 |
| 21 | 彭争, 聂宏. 舰尾流扰动下无人机纵向着舰控制律设计[J]. 电光与控制, 2020, 27 (1): 3- 5. |
| PENG Z , NIE H . Design of UAV's longitudinal carrier landing control law under disturbance of carrier air wake[J]. Electro-optical and Control, 2020, 27 (1): 3- 5. | |
| 22 | GUAN Z Y , LIU H , ZHENG Z W , et al. Fixed-time control for automatic carrier landing with disturbance[J]. Aerospace Science and Technology, 2021, (108): 8- 11. |
| 23 | ZHENG F Y , ZHEN Z Y . Trade off analysis of factors affecting longitudinal carrierlanding performance for small UAV based on backstepping controller[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2015, 32 (1): 97- 109. |
| 24 | WANG L P , ZHANG Z , ZHU Q D , et al. Longitudinal automatic carrier landing system guidance law using model predictive control with an additional landing risk term[J]. Proc.of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2017, 233 (3): 2- 4. |
| 25 |
GAVILAN F , VAZQUEZ R , ESTABAN S . Trajectory tracking for fixed-wing UAV using model predictive control and adaptive backstepping[J]. IFAC-PapersOnLine, 2015, 48 (9): 132- 137.
doi: 10.1016/j.ifacol.2015.08.072 |
| 26 | SONNEVELDT L, CHU Q P, MULDER J A. Constrained adaptive backstepping flight control: application to a nonlinear F-16/MATVmodel[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference and Exhibit, 2013: 45-48. |
| 27 | MISRA G, GAO T Y, BAI X L. Modeling and simulation of UAV carrier landings[C]//Proc. of the AIAA Science and Technoloqy Forum, 2019: 23-27. |
| 28 | WANG L P , ZHANG Z , ZHU Q D , et al. Lateral autonomous carrier-landing control with high-dimension landing risks consideration[J]. Aircraft Engineering and Aerospace Technology, 2020, 92 (6): 105- 109. |
| 29 | ZHU Q D , YANG Z B . Design of air-wake rejection control for longitudinal automatic carrier landing cyber-physical system[J]. Computers and Electrical Engineering, 2020, 126 (84): 321- 326. |
| 30 | WOODCOCK R J. Background information and user guide for MIL-F-8785C[R]. Washington: Air Force Wright Aeronautical, 1982. |
| 31 | 吴文海, 汪节, 高丽, 等. 舰载机着舰指标体系构建[J]. 飞行力学, 2017, 35 (5): 37- 42. |
| WU W H , WANG J , GAO L , et al. Construction of carrier landing index system for carrier-based aircraft[J]. Flight Mechanics, 2017, 35 (5): 37- 42. |
| [1] | Yang XU, Mingren HAN, Jiang SHAO, Delin LUO. Attitude antagonistic consensus control of satellite swarm system based on MRPs [J]. Systems Engineering and Electronics, 2021, 43(7): 1904-1911. |
| [2] | Yiming ZHANG, Jianliang AI. Positioning of aerial refueling drogue and docking control based on binocular vision [J]. Systems Engineering and Electronics, 2021, 43(10): 2940-2953. |
| [3] | Zongxing LI, Rui ZHANG. Missile adaptive attitude control based on Riccati equation [J]. Systems Engineering and Electronics, 2020, 42(6): 1358-1365. |
| [4] | TANG Weiqiang, LONG Wenkun, SUN Lijuan, HUANG Xiaoli. Multiple model adaptive control of nonlinear systems based on clustering method and neural network [J]. Systems Engineering and Electronics, 2019, 41(9): 2100-2106. |
| [5] | TANG Shengjing, LI Mengting, LIU Zhenchang, GUO Jie. Transition maneuver flight control for a tandemwing VTOL UAV [J]. Systems Engineering and Electronics, 2019, 41(6): 1342-1350. |
| [6] | TAO Jiawei, ZHANG Tao. Coupled control of relative position and attitude for spacecraft proximity operations with prescribed performance [J]. Systems Engineering and Electronics, 2019, 41(5): 1103-1109. |
| [7] | LI Guiying, YU Zhigang, ZHANG Yang. Cooperative guidance law with angle constraint to intercept maneuvering target [J]. Systems Engineering and Electronics, 2019, 41(3): 626-635. |
| [8] | SHU Shi, FANG Jiancheng, ZHANG Wei, LIU Gang, QIAN Yong, ZHANG Jian, CUI Peiling. Composite compensation method to improve the image registration based on MSCMG [J]. Systems Engineering and Electronics, 2019, 41(12): 2827-2834. |
| [9] | JIA Qingxian, ZHANG Chengxi, LI Huayi, ZHANG Yingchun. A novel learning observer-based fault reconstruction for satellite actuators [J]. Systems Engineering and Electronics, 2019, 41(12): 2835-2841. |
| [10] | DONG Chaoyang, MA Mingyu, WANG Qing, ZHOU Min. Attitude cooperative control of multiple spacecraft on SO(3) with communication time-delay [J]. Systems Engineering and Electronics, 2018, 40(9): 2032-2039. |
| [11] | ZHONG Jingyang, SONG Bifeng. Position control of a tail-sitter MAV based on L1 adaptive controller in hover stage [J]. Systems Engineering and Electronics, 2018, 40(9): 2062-2070. |
| [12] | LYU Zheng, JIN Guang, YANG Tianshe, WU Guan, LAN Xinzhang. Multi-level health evaluation method for on orbit satellites based on reconfigurable degree#br# [J]. Systems Engineering and Electronics, 2018, 40(8): 1769-1776. |
| [13] | SHEN Zhipeng, WANG Ru. Adaptive sliding mode trajectory tracking control of underactuated ship based on DSC-MLP [J]. Systems Engineering and Electronics, 2018, 40(3): 643-651. |
| [14] | WANG Chao, ZHANG Shengxiu, SONG Zibiao, YANG Jianye, WU Xiaolu. Aircraft anti-windup of robust adaptive nonlinear predictive control [J]. Systems Engineering and Electronics, 2018, 40(2): 393-400. |
| [15] | WEI Yang, XU Haojun, XUE Yuan. Adaptive disturbance rejection controller design for UAV three dimensional formation keeping#br# [J]. Systems Engineering and Electronics, 2018, 40(12): 2758-2765. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||