Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (1): 76-85.doi: 10.12305/j.issn.1001-506X.2022.01.11
• Sensors and Signal Processing • Previous Articles Next Articles
Multi-target tracking algorithm based on GM-PHD filter for spatially close targets
Yang GONG*, Chen CUI
- Institute of Electronic Countermeasure, National University of Defense Technology, Hefei 230037, China
-
Received:2020-01-22Online:2022-01-01Published:2022-01-19 -
Contact:Yang GONG
CLC Number:
Cite this article
Yang GONG, Chen CUI. Multi-target tracking algorithm based on GM-PHD filter for spatially close targets[J]. Systems Engineering and Electronics, 2022, 44(1): 76-85.
share this article

Fig.1
Illustration of missing alarm and false alarm for GM-PHD filter"
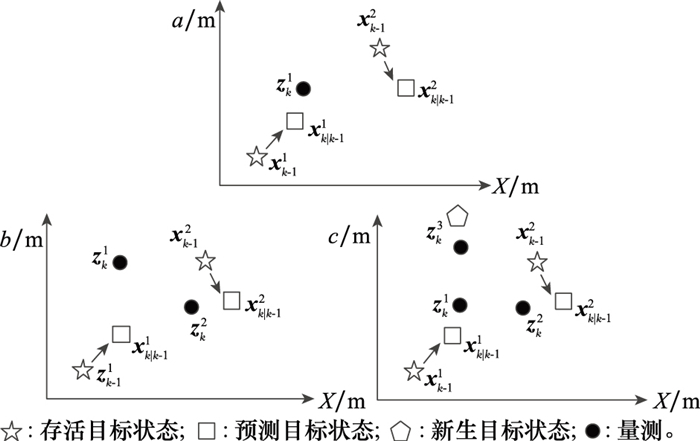

Fig.2
True trajectories of targets"
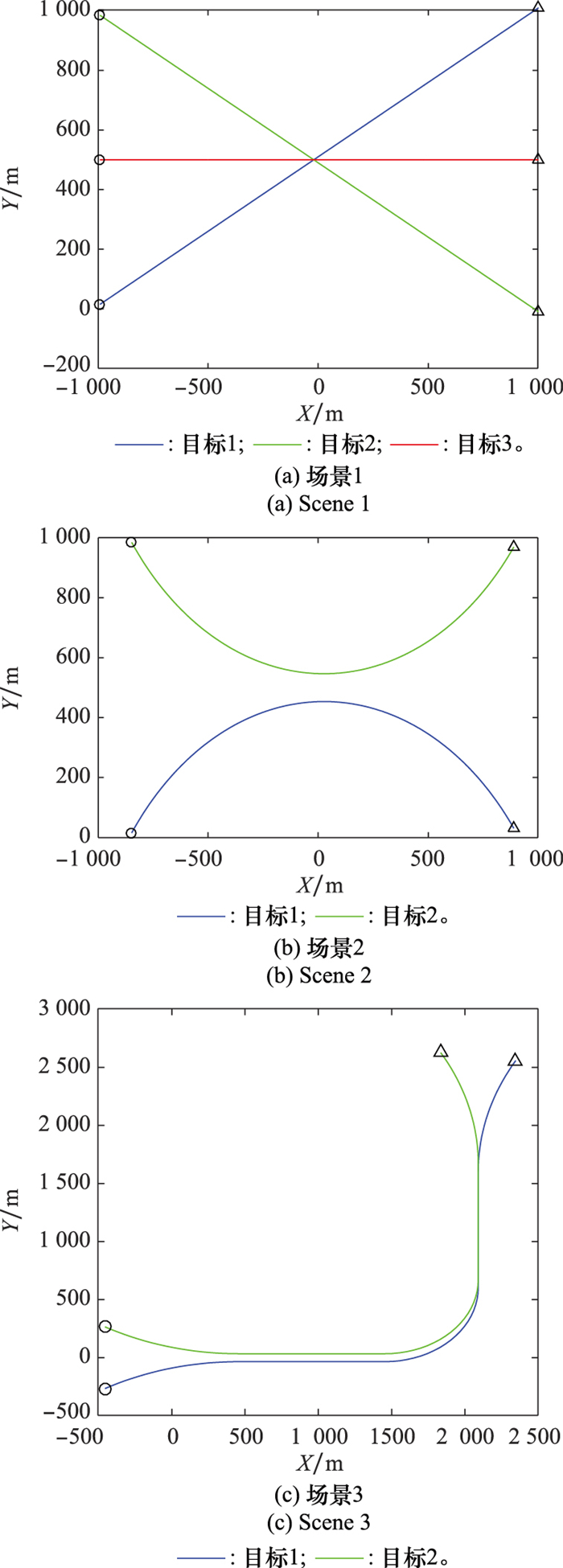
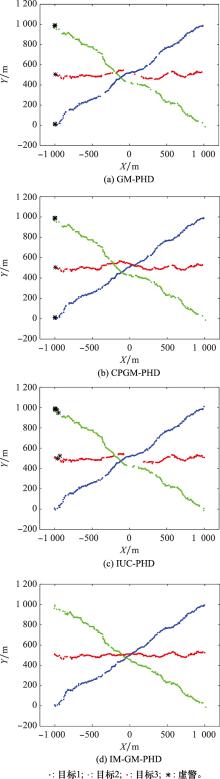
Fig.3
Example of tracking results for four filters in Scene 1"

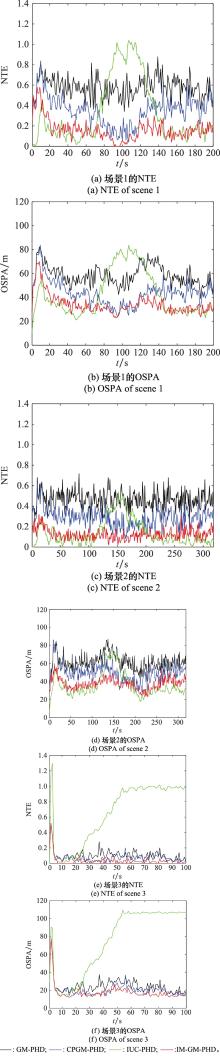
Fig.4
Estimate of NTE and OSPA distance"
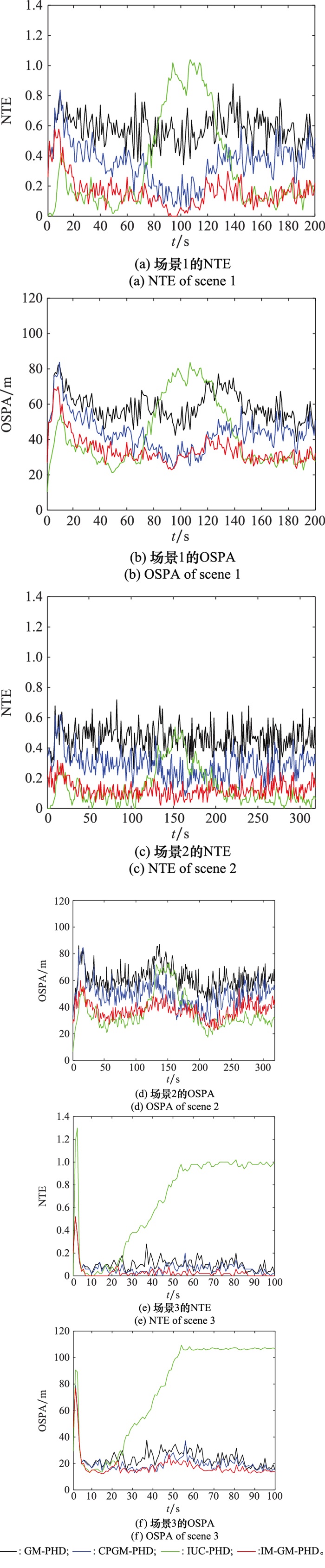
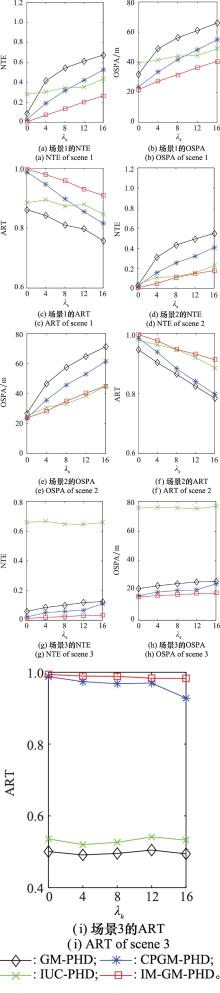
Fig.5
Estimate of NTE, OSPA distance and ART under different clutter numbers"

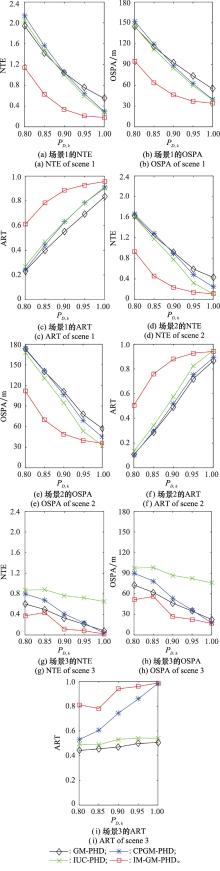
Fig.6
Estimate of NTE, OSPA distance and ART under different detection probabilities"
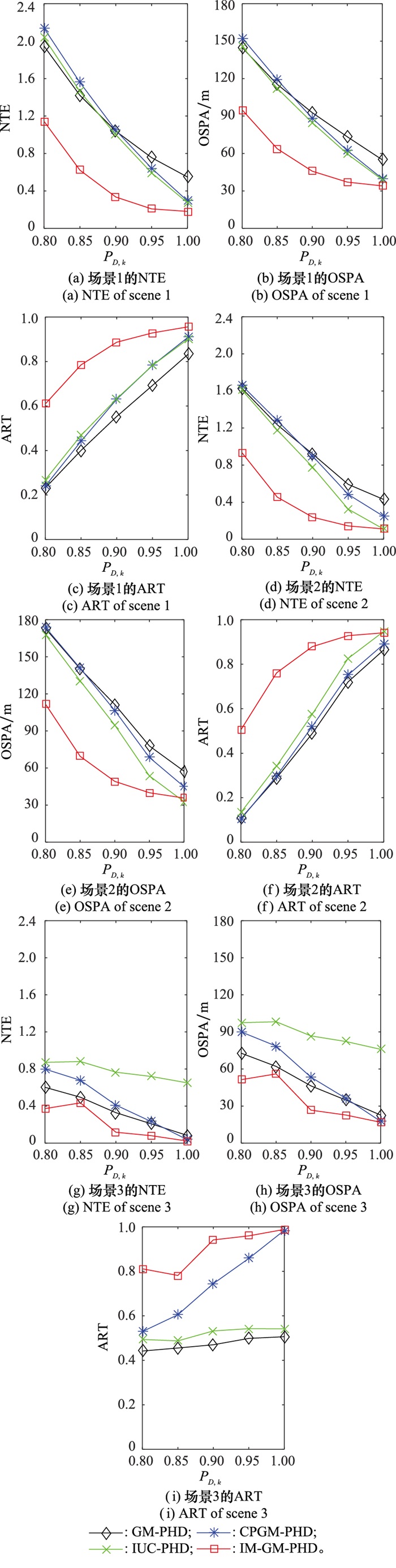
Table 1
Average run time s"
| 滤波器 | 场景1 | 场景2 | 场景3 |
| GM-PHD | 1.327 6 | 1.077 1 | 0.468 3 |
| CPGM-PHD | 1.389 5 | 1.242 0 | 0.474 9 |
| IUC-PHD | 1.919 6 | 1.596 9 | 0.703 6 |
| IM-GM-PHD | 1.401 1 | 1.252 0 | 0.501 0 |
| 1 | MAHLER R . Statistical multisourcemultitarget information fusion[M]. Norwood Artech House, 2007. |
| 2 | BLOM H A, BLOEM E A. Interacting multiple model joint probabilistic data association avoiding track coalescence[C]//Proc. of the IEEE Conference on Decision and Control, 2002: 3408-3415. |
| 3 |
BLACKMAN S . Multiple hypothesis tracking for multiple target tracking[J]. IEEE Aerospace and Electronic Systems Magazine, 2004, 19 (1): 5- 18.
doi: 10.1109/MAES.2004.1263228 |
| 4 |
MAHLER R . Multitarget bayes filtering via first-order multitarget moments[J]. IEEE Trans.on Aerospace and Electronic Systems, 2003, 39 (4): 1152- 1178.
doi: 10.1109/TAES.2003.1261119 |
| 5 |
VO B N , MA W K . The Gaussian mixture probability hypothesis density filter[J]. IEEE Trans.on Signal Processing, 2006, 54 (11): 4091- 4104.
doi: 10.1109/TSP.2006.881190 |
| 6 |
VO B N , SINGH S , DOUCET A . Sequential Monte Carlo methods for multi-target filtering with random finite sets[J]. IEEE Trans.on Aerospace and Electronic Systems, 2005, 41 (4): 1224- 1245.
doi: 10.1109/TAES.2005.1561884 |
| 7 |
ZHOU X L , LI Y F , HE B W . Entropy distribution and coverage rate-based birth intensity estimation in GM-PHD filter for multi-target visual tracking[J]. Signal Processing, 2014, 94, 650- 660.
doi: 10.1016/j.sigpro.2013.08.002 |
| 8 |
ZHOU X L , YU H , LIU H H , et al. Tracking multiple video targets with an improved GM-PHD tracker[J]. Sensors, 2015, 15 (12): 30240- 30260.
doi: 10.3390/s151229794 |
| 9 | 袁常顺, 王俊, 雷鹏, 等. 基于PHD滤波的相控阵雷达多目标跟踪算法[J]. 系统工程与电子技术, 2016, 38 (3): 539- 544. |
| YUAN C S , WANG J , LEI P , et al. Multi-target tracking based on PHD filter for phased array radar[J]. Systems Engineering and Electronics, 2016, 38 (3): 539- 544. | |
| 10 | LI G C, YI W, JIANG M, et al. Distributed fusion with PHD filter for multi-target tracking in asynchronous radar system[C]// Proc. of the IEEE Radar Conference, 2017: 1434-1439. |
| 11 |
熊伟, 顾祥岐, 徐从安, 等. 基于ET-GMPHD算法的编队目标跟踪方法[J]. 系统工程与电子技术, 2020, 42 (11): 2434- 2440.
doi: 10.3969/j.issn.1001-506X.2020.11.04 |
|
XIONG W , GU X Q , XU C C , et al. Formation target tracking method based on ET-GMPHD algorithm[J]. Systems Engineering and Electronics, 2020, 42 (11): 2434- 2440.
doi: 10.3969/j.issn.1001-506X.2020.11.04 |
|
| 12 | 姜琦, 王锐, 周超, 等. 基于代数图论的修正贝叶斯群目标航迹起始算法[J]. 电子与信息学报, 2021, 43 (3): 531- 538. |
| JIANG Q , WANG R , ZHOU C , et al. Modified Bayesian group target track initiation algorithm based on algebraic graph theory[J]. Journal of Electronics and Information Technology, 2021, 43 (3): 531- 538. | |
| 13 | KIM H, GRANSTROM K, GAO L, et al. Joint CKF-PHD filter and map fusion for 5G multi-cell SLAM[C]//Proc. of the IEEE International Conference on Communications, 2020. |
| 14 | YAZDIAN-DEHKORDI M, AZIMIFAR Z, MASNADI-SHIRAZI M A. An improvement on GM-PHD filter for occluded target tracking[C]//Proc. of the International Conference on Acoustics Speech and Signal Processing, 2011: 1773-1776. |
| 15 |
YAZDIAN-DEHKORDI M , AZIMIFAR Z , MASNADI-SHIRAZI M A . Penalized Gaussian mixture probability hypothesis density filter for multiple target tracking[J]. Signal Processing, 2012, 92 (5): 1230- 1242.
doi: 10.1016/j.sigpro.2011.11.016 |
| 16 | YAZDIAN-DEHKORDI M , AZIMIFAR Z , MASNADI-SHIRAZI M A . Competitive Gaussian mixture probability hypothesis density filter for multiple target tracking in the presence of ambiguity and occlusion[J]. IET Radar, Sonar & Navigation, 2012, 6 (4): 251- 262. |
| 17 | WANG Y , MENG H D , LIU Y M , et al. Collaborative penalized Gaussian mixture PHD tracker for close target tracking[J]. Signal Processing, 2014, 102, 36714255. |
| 18 |
ZHANG H Q , GE H L , YANG J L , et al. A GM-PHD algorithm for multiple target tracking based on false alarm detection with irregular window[J]. Signal Processing, 2016, 120, 537- 552.
doi: 10.1016/j.sigpro.2015.10.007 |
| 19 | 张艺杰, 雷明. 量测划分的PHD航迹关联算法[J]. 哈尔滨工业大学学报, 2018, 50 (4): 68- 76. |
| ZHANG Y J , LEI M . PHD track association algorithm based on measurement partition[J]. Journal of Harbin Institute of Technology, 2018, 50 (4): 68- 76. | |
| 20 |
史玺, 杨峰, 梁彦, 等. 低检测概率下改进的概率假设密度滤波器[J]. 指挥信息系统与技术, 2014, 5 (6): 36- 40.
doi: 10.3969/j.issn.1674-909X.2014.06.007 |
|
SHI X , YANG F , LIANG Y , et al. Improved probability hypothesis density filter with low detection probability[J]. Command Information System and Technology, 2014, 5 (6): 36- 40.
doi: 10.3969/j.issn.1674-909X.2014.06.007 |
|
| 21 |
刘宗香, 谢维信, 王品, 等. 一种具有信息保持能力的GM-PHD滤波器[J]. 电子学报, 2013, 41 (8): 1603- 1608.
doi: 10.3969/j.issn.0372-2112.2013.08.024 |
|
LIU Z X , XIE W X , WANG P , et al. A Gaussian mixture PHD filter with the capability of information hold[J]. Acta Electronica Sinica, 2013, 41 (8): 1603- 1608.
doi: 10.3969/j.issn.0372-2112.2013.08.024 |
|
| 22 |
YAZDIAN-DEHKORDI M , AZIMIFAR Z . Refined GM-PHD tracker for tracking targets in possible subsequent missed detections[J]. Signal Processing, 2015, 116, 112- 126.
doi: 10.1016/j.sigpro.2015.04.008 |
| 23 |
ZHANG H Q , GE H W , YANG J L , et al. Iterative update correction and multi-frame state extraction based probability hypothesis density filter[J]. Aerospace Science and Technology, 2017, 63, 54- 62.
doi: 10.1016/j.ast.2016.12.012 |
| 24 |
LI G , LIU H W , LIU H Y . Probability hypothesis density filter with imperfect detection probability for multi-target tracking[J]. Optik, 2016, 127 (22): 10428- 10436.
doi: 10.1016/j.ijleo.2016.08.060 |
| 25 |
董凯, 刘瑜, 王海鹏. 空间邻近目标跟踪与航迹关联的联合优化算法[J]. 宇航学报, 2014, 35 (10): 1211- 1217.
doi: 10.3873/j.issn.1000-1328.2014.10.015 |
|
DONG K , LIU Y , WANG H P . Joint optimization algorithm for closely spaced objects' tracking and track association[J]. Journal of Astronautics, 2014, 35 (10): 1211- 1217.
doi: 10.3873/j.issn.1000-1328.2014.10.015 |
|
| 26 |
PANTA K , CLARK D E , VO B N . Data association and track management for the Gaussian mixture probability hypothesis density filter[J]. IEEE Trans.on Aerospace and Electronic Systems, 2009, 45 (3): 1003- 1016.
doi: 10.1109/TAES.2009.5259179 |
| 27 |
SCHUHMACHER D , VO B T , VO B N . A consistent metric for performance evaluation of multi-object filters[J]. IEEE Trans.on Signal Processing, 2008, 56 (8): 3447- 3457.
doi: 10.1109/TSP.2008.920469 |
| [1] | CHENG Xuan, SONG Liping, JI Hongbing, ZOU Zhibin. Group target tracking algorithm based on labeled box particle probability hypothesis density [J]. Systems Engineering and Electronics, 2019, 41(8): 1677-1685. |
| [2] | LIU Jiangyi, WANG Chunping, WANG Wei. Probability hypothesis density filter based on pairwise Markov chains [J]. Systems Engineering and Electronics, 2019, 41(5): 944-950. |
| [3] | LI Wenjuan, LV Jing, GU Hong, SU Weimin. Extended target tracking based on beta Gaussian probability hypothesis density [J]. Systems Engineering and Electronics, 2018, 40(9): 1897-1904. |
| [4] | ZHAN Kun, JIANG Hong, ZHAO Tian-qu, YU Yao-zhong. Multi-target joint tracking and classification based on model-class-matched PHD filter and TBM [J]. Systems Engineering and Electronics, 2016, 38(10): 2235-2243. |
| [5] | WANG Hai-huan, WANG Jun. Multitarget tracking with the cubature Kalman particle probability hypothesis density filter [J]. Systems Engineering and Electronics, 2015, 37(9): 1960-1966. |
| [6] | LI Cui-yun, CAO Xiao-nan, LIAO Liang-xiong, JIANG Zhou. Track before detect using Gaussian particle probability hypothesis density [J]. Systems Engineering and Electronics, 2015, 37(4): 740-745. |
| [7] | WANG Li-wei, SI Wei-jian, QU Zhi-yu. Improved SMC-PHD algorithm for multiple targets tracking [J]. Systems Engineering and Electronics, 2015, 37(10): 2205-2211. |
| [8] | YANG Feng, WANG Yong-qi, LIANG Yan, PAN Quan. Collaborative PHD filter for fast multi-target tracking [J]. Systems Engineering and Electronics, 2014, 36(11): 2113-2121. |
| [9] | OUYANG Cheng, HUA Yun, GAO Shang-wei. Improved adaptive target birth intensity for PHD filter [J]. Systems Engineering and Electronics, 2013, 35(12): 2452-2458. |
| [10] | ZHONG Qian-yi, JI Hong-bing, OUYANG Cheng. Passive multitarget tracking based on modified MeMBer filter [J]. Journal of Systems Engineering and Electronics, 2012, 34(8): 1549-1554. |
| [11] | ZHOU Weidong, ZHANG Hebing, QIAO Xiangwei. Multitarget tracking algorithm based on kernel density estimation Gaussian mixture PHD filter [J]. Journal of Systems Engineering and Electronics, 2011, 33(9): 1932-1936. |
| [12] | TAN Shun-cheng, WANG Guo-hong, WANG Na,2, JIA Shu-yi. Multi target tracking based on PHD filter and data association [J]. Journal of Systems Engineering and Electronics, 2011, 33(4): 734-737. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||