Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (2): 487-498.doi: 10.12305/j.issn.1001-506X.2021.02.23
• Guidance, Navigation and Control • Previous Articles Next Articles
Distributed adaptive cooperative tracking control of multi-agent system with weak communication
Pu ZHANG( ), Huifeng XUE(), Shan GAO(), Xuan ZUO()
), Huifeng XUE(), Shan GAO(), Xuan ZUO()
- School of Automation, Northwestern Polytechnical University, Xi'an 710129, China
-
Received:2020-08-19Online:2021-02-01Published:2021-03-16
CLC Number:
Cite this article
Pu ZHANG, Huifeng XUE, Shan GAO, Xuan ZUO. Distributed adaptive cooperative tracking control of multi-agent system with weak communication[J]. Systems Engineering and Electronics, 2021, 43(2): 487-498.
share this article
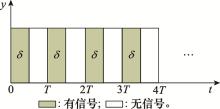
Fig.1
Schematic diagram of weak communication for information interaction among agents"
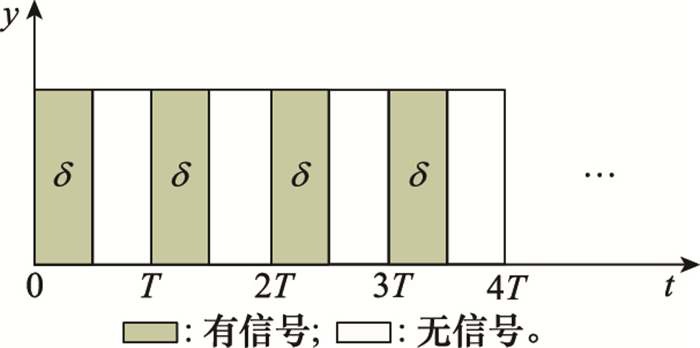

Fig.2
Diagram of the force relationship among obstacle, agent and target"

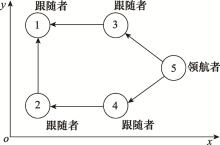
Fig.3
Structure schematic diagram of the multi-agent system topology"
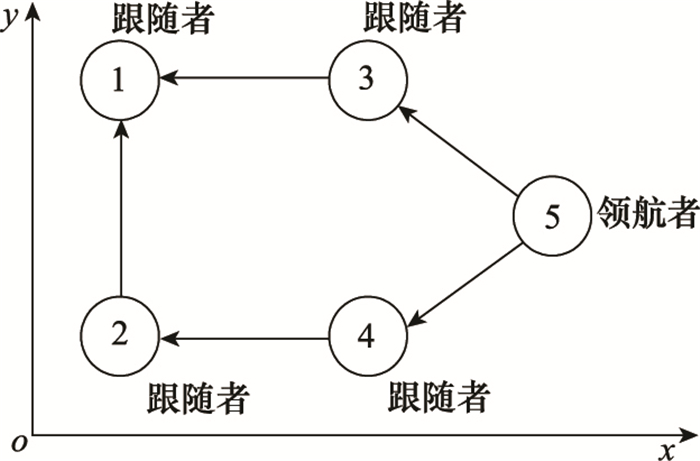
Table 1
Initial positions, expected positions and parameter estimates of the five agents"
智能体编号 | (x0, y0)/m | (δix, δiy)/m | ( |
| 智能体#1 | (1, 2) | (1, 3) | (3, 6) |
| 智能体#2 | (2, 1) | (1, 1) | (5, 2) |
| 智能体#3 | (3, 3) | (4, 3) | (4, 3) |
| 智能体#4 | (2, 5) | (4, 1) | (7, 1) |
| 智能体#5 | (4, 2) | (6, 2) | (10, 4) |
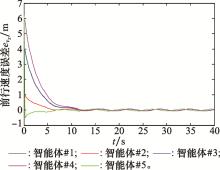
Fig.4
Forward speed error curve of the multi-agent system"
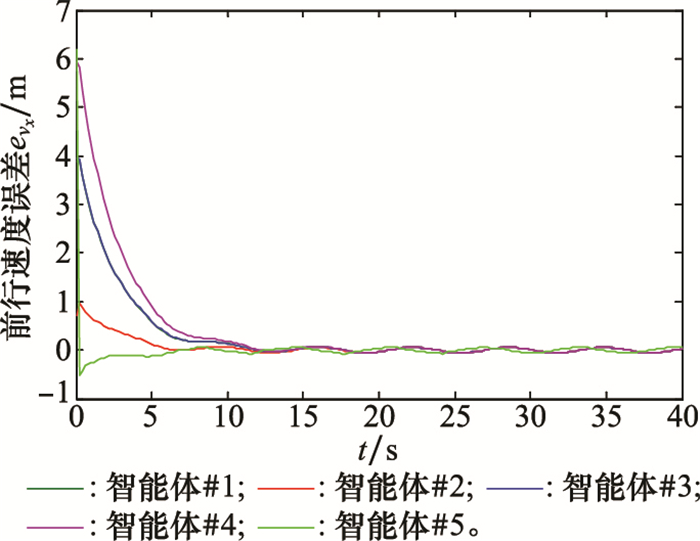
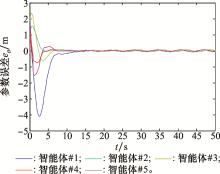
Fig.5
Curve of parameter $ {\hat \theta }$ error"
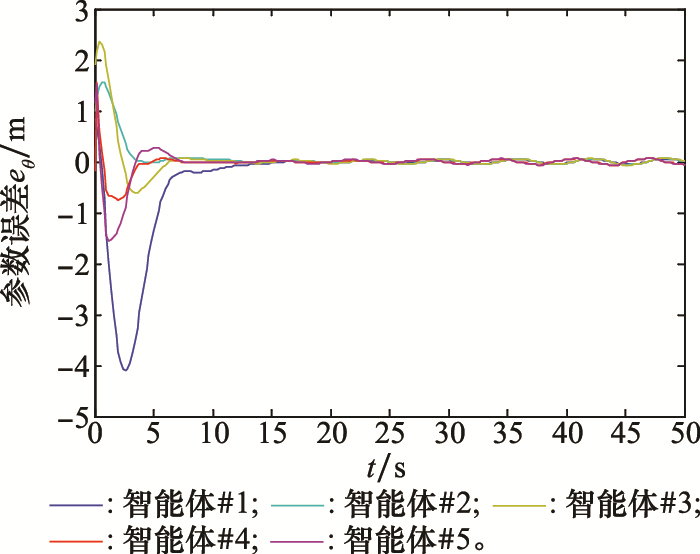
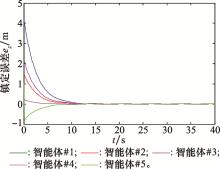
Fig.6
Curve of stabilization error"
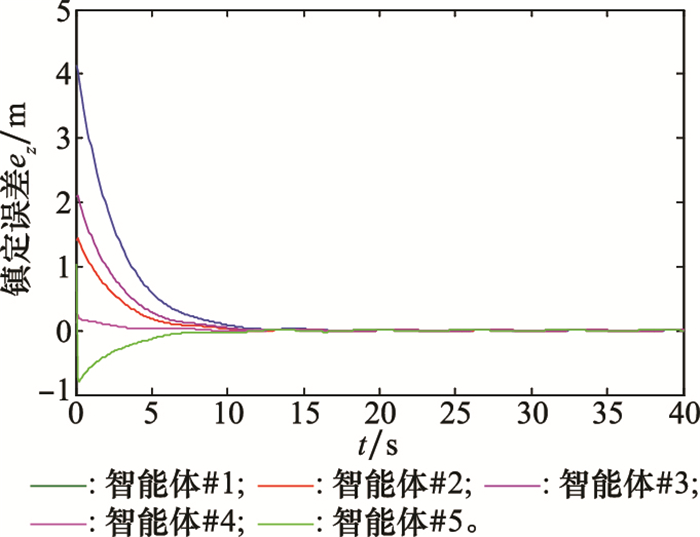
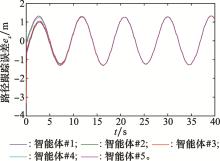
Fig.7
Tracking error curve of multi-agent system in the x direction"
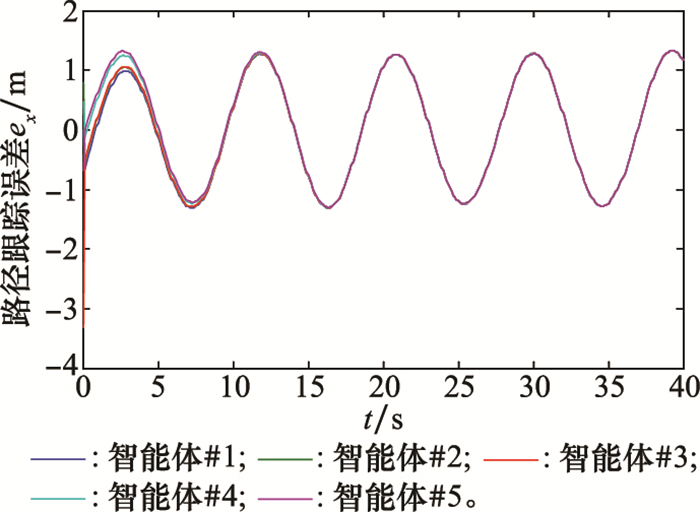
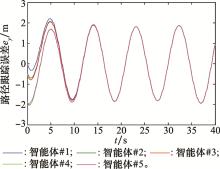
Fig.8
Tracking error curve of the multi-agent system in the y direction"
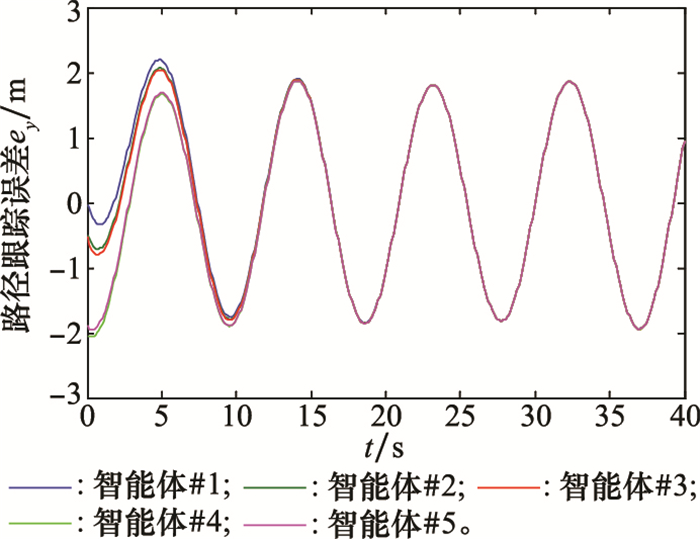
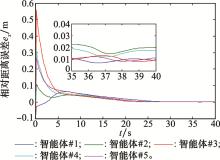
Fig.9
Relative distance exerror curve of the multi-agent system in the x direction"
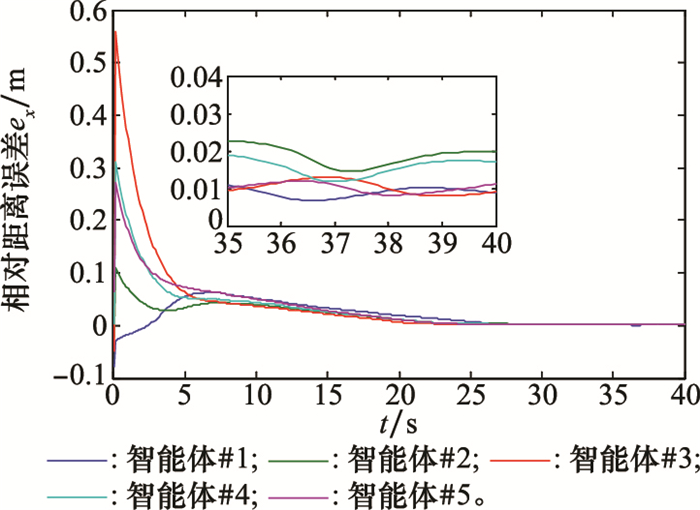
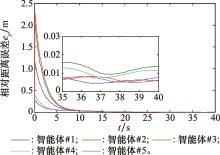
Fig.10
Relative distance error curve of the multi-agent system in the y direction"
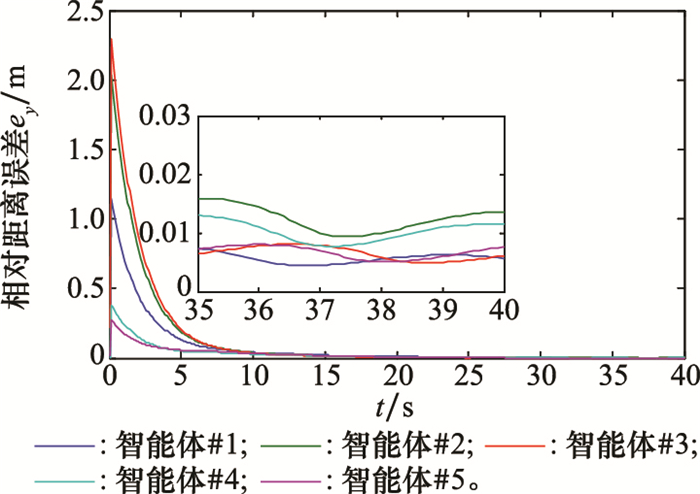
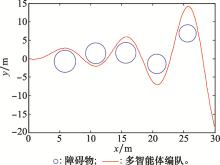
Fig.11
Collision avoidance curve of the multi-agent"
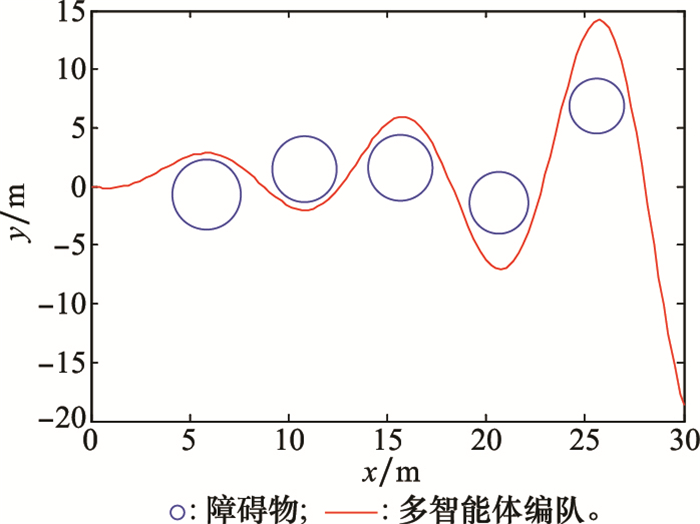
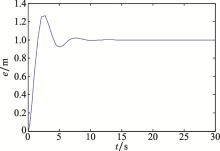
Fig.12
Relative distance error curve of the multi-agent collision avoidance process"
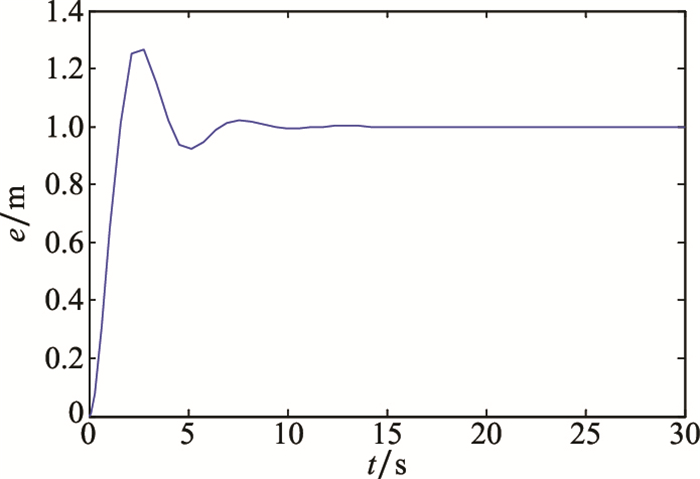
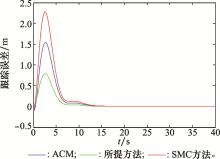
Fig.13
Tracking error curve of the multi-agent"
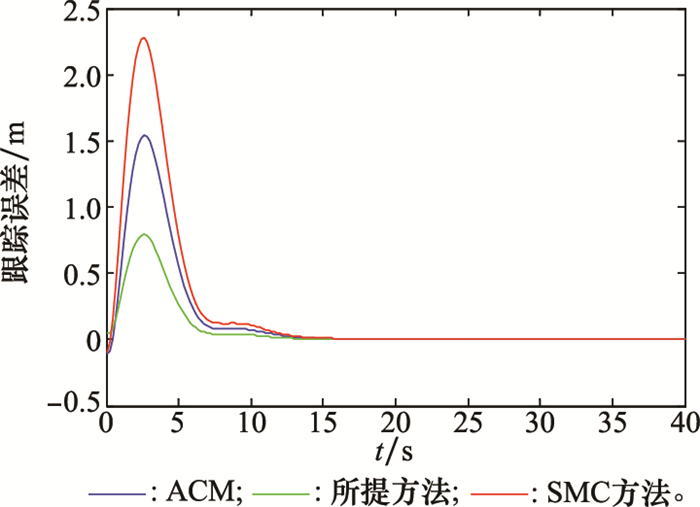
Table 2
Comparison of tracking effects for three methods"
| 方法 | 稳态误差/m | 稳定时间/s |
| 所提方法 | 0.62 | 7.1 |
| SMC方法 | 2.32 | 16.3 |
| ACM方法 | 1.61 | 13.1 |
| 1 | 张志伟, 滕英元, 杨慧欣, 等. 具有速度、加速度约束的机器人编队避障控制[J]. 控制理论与应用, 2020, 37 (6): 1388- 1396. |
| ZHANG Z W , TENG Y Y , YANG H X , et al. Obstacle avoidance control for robots formation with speed and acceleration constraints[J]. Control Theory & Applications, 2020, 37 (6): 1388- 1396. | |
| 2 |
张志伟, 滕英元. 机器人编队协同控制方法综述[J]. 机电信息, 2019, (32): 28- 30.
doi: 10.3969/j.issn.1671-0797.2019.32.015 |
|
ZHANG Z W , TENG Y Y . Overview of collaborative control methods for robot formation[J]. Mechanical and Electrical Information, 2019, (32): 28- 30.
doi: 10.3969/j.issn.1671-0797.2019.32.015 |
|
| 3 | 芮可人, 王丽华, 谢能刚. 基于虚拟结构优化模型的多机器人编队形成方法[J]. 现代信息科技, 2019, 3 (18): 56- 58. |
| RUI K R , WANG L H , XIE N G . Formation method of multi-robot formation based on virtual structure optimization model[J]. Modern Information Technology, 2019, 3 (18): 56- 58. | |
| 4 |
ZHANG J L , YAN J G , ZHANG P . Multi-UAV formation control based on a novel back-stepping approach[J]. IEEE Trans.on Vehicular Technology, 2020, 69 (3): 2437- 2448.
doi: 10.1109/TVT.2020.2964847 |
| 5 |
WEN G G , ZHAI X Q , PENG Z X , et al. Fault-tolerant secure consensus tracking of delayed nonlinear multi-agent systems with deception attacks and uncertain parameters via impulsive control[J]. Communications in Nonlinear Science and Numerical Simulation, 2020, 82, 105043.
doi: 10.1016/j.cnsns.2019.105043 |
| 6 |
CHENG Y , UGRINOVSII V . Event-triggered leader-following tracking control for multivariable multi-agent systems[J]. Automatica, 2016, 70, 204- 210.
doi: 10.1016/j.automatica.2016.04.003 |
| 7 |
HU J P , FENG G . Distributed tracking control of leader-follower multi-agent systems under noisy measurement[J]. Automatica, 2010, 46 (8): 1382- 1387.
doi: 10.1016/j.automatica.2010.05.020 |
| 8 | BEN-OR M , GOLDWASSER S , WIGDERSON A . Completeness theorems for non-cryptographic fault-tolerant distributed computation[M]. Jerusalem: Hebrew University Press, 2019. |
| 9 | ZHAO B , LIU D R , LI Y C . Observer based adaptive dynamic programming for fault tolerant control of a class of nonlinear systems[J]. Information Sciences, 2017, (384): 21- 33. |
| 10 | WANG J , LIANG K , HUANG X , et al. Dissipative fault-tolerant control for nonlinear singular perturbed systems with Markov jumping parameters based on slow state feedback[J]. Applied Mathematics & Computation, 2018, 328, 247- 262. |
| 11 |
SHI G D , HONG Y G . Global target aggregation and state agreement of nonlinear multi-agent systems with switching topologies[J]. Automatica, 2009, 45 (5): 1165- 1175.
doi: 10.1016/j.automatica.2008.12.015 |
| 12 |
YU W , ZHENG W X , CHEN G , et al. Second-order consensus in multi-agent dynamical systems with sampled position data[J]. Automatica, 2011, 47 (7): 1496- 1503.
doi: 10.1016/j.automatica.2011.02.027 |
| 13 |
OLIVEIRA L B , CAMPONOGARA E . Multi-agent model predictive control of signaling split in urban traffic networks[J]. Transportation Research Part C: Emerging Technologies, 2010, 18 (1): 120- 139.
doi: 10.1016/j.trc.2009.04.022 |
| 14 |
GUERRA E , BOLEA Y , GAMIZ J , et al. Design and implementation of a virtual sensor network for smart waste water monitoring[J]. Sensors, 2020, 20 (2): 358.
doi: 10.3390/s20020358 |
| 15 | HAN Y , ZHANG K , LI H , et al. MAS-based distributed coordinated control and optimization in microgrid and microgrid clusters: a comprehensive overview[J]. IEEE Trans.on Power Electronics, 2017, 33 (8): 6488- 6508. |
| 16 |
LIU R T , BURKE T A , ABRAMSON L Y , et al. The behavioral approach system (BAS) model of vulnerability to bipolar disorder: evidence of a continuum in BAS sensitivity across adolescence[J]. Journal of Abnormal Child Psychology, 2018, 46 (6): 1333- 1349.
doi: 10.1007/s10802-017-0363-9 |
| 17 |
CHEN S M , PEI H Q , LAI Q , et al. Multitarget tracking control for coupled heterogeneous inertial agents systems based on flocking behavior[J]. IEEE Trans.on Systems, Man, and Cybernetics: Systems, 2019, 49 (12): 2605- 2611.
doi: 10.1109/TSMC.2017.2789335 |
| 18 | LI J, XUE D R, ZHANG J X. Multi-UUV formation coordination control based on combination of virtual structure and leader[C]//Proc.of the IEEE International Conference on Mechatronics and Automation, 2018: 1574-1579. |
| 19 | 刘安东,秦冬冬,金哲豪,等.一种基于虚拟结构法的多移动机器人分布式预测控制方法[P].中国: CN201910693124.5, 2020-01-17. |
| LIU A D, QIN D D, JIN Z H, et al. A distributed predictive control for multiple mobile robots based on virtual structure method[P]. China: CN201910693124.5, 2020-01-17. | |
| 20 | HE W , ZHANG B , HAN Q L , et al. Leader-following consensus of nonlinear multi-agent systems with stochastic sampling[J]. IEEE Trans.on Cybernetics, 2016, 47 (2): 327- 338. |
| 21 |
YAN C , FANG H Z , CHAO H Y . Energy-aware leader-follower tracking control for electric-powered multi-agent systems[J]. Control Engineering Practice, 2018, 79, 209- 218.
doi: 10.1016/j.conengprac.2018.07.013 |
| 22 | NING B , HAN Q L , LU Q . Fixed-time leader-following consensus for multiple wheeled mobile robots[J]. IEEE Trans.on Cybernetics, 2019, 50 (10): 4381- 4392. |
| 23 |
BAINY R G , SILVA K , LOTFIFARD S , et al. Dynamic zone selection for busbar protection based on graph theory and boolean algebra[J]. IEEE Trans.on Power Delivery, 2020, 35 (4): 1769- 1778.
doi: 10.1109/TPWRD.2019.2953594 |
| 24 | YING K Z. Flight path planning of agriculture UAV based on improved artificial potential field method[C]//Proc.of the IEEE Chinese Control and Decision Conference, 2018: 1526-1530. |
| 25 | REN W, MOORE K, CHEN Y Q. High-order consensus algorithms in cooperative vehicle systems[C]//Proc.of the IEEE International Conference on Networking, Sensing and Control, 2006: 457-462. |
| 26 |
LIU J , FANG J A , LI Z , et al. Time-varying formation tracking for second-order multi-agent systems subjected to switching topology and input saturation[J]. International Journal of Control, Automation and Systems, 2020, 18 (4): 991- 1001.
doi: 10.1007/s12555-019-0473-y |
| 27 |
YU W , ZHENG W X , CHEN G , et al. Second-order consensus in multi-agent dynamical systems with sampled position data[J]. Automatica, 2011, 47 (7): 1496- 1503.
doi: 10.1016/j.automatica.2011.02.027 |
| 28 |
WANG W , HUANG C , HUANG C X , et al. Bipartite formation problem of second-order nonlinear multi-agent systems with hybrid impulses[J]. Applied Mathematics and Computation, 2020, 370, 124926.
doi: 10.1016/j.amc.2019.124926 |
| 29 |
ISLAM S , XIROS N I . Robust asymptotic and finite-time tracking for second-order nonlinear multi-agent autonomous systems[J]. International Journal of Control, Automation and Systems, 2019, 17 (12): 3069- 3078.
doi: 10.1007/s12555-018-0470-6 |
| 30 |
REN W , BEARD R W . Consensus seeking in multiagent systems under dynamically changing interaction topologies[J]. IEEE Trans.on Automatic Control, 2005, 50 (5): 655- 661.
doi: 10.1109/TAC.2005.846556 |
| 31 |
HU J L , SUN X X , HE L . Formation tracking for nonlinear multi-agent systems with input and output quantization via adaptive output feedback control[J]. Journal of Systems Science and Complexity, 2020, 33, 401- 425.
doi: 10.1007/s11424-019-8087-2 |
| 32 |
LI J S , LI J M . Distributed adaptive fuzzy iterative learning control of coordination problems for higher order multi-agent systems[J]. International Journal of Systems Science, 2016, 47 (10): 2318- 2329.
doi: 10.1080/00207721.2014.993139 |
| [1] | Pu ZHANG, Huifeng XUE, Shan GAO, Xuan ZUO. Distributed finite-time adaptive cooperative fault-tolerant control for multi-agent systems with integrated actuators faults [J]. Systems Engineering and Electronics, 2022, 44(4): 1220-1229. |
| [2] | Zhe LUO, Wanzhen QUAN, Purui ZHANG, Xiaogang YANG. Consensus tracking control for one-side Lipschitz nonlinear multi-agent systems [J]. Systems Engineering and Electronics, 2022, 44(1): 279-284. |
| [3] | Jiayi LIU, Shaohua YUE, Gang WANG, Xiaoqiang YAO, Jie ZHANG. Cooperative evolution algorithm of multi-agent system under complex tasks [J]. Systems Engineering and Electronics, 2021, 43(4): 991-1002. |
| [4] | Ang GAO, Zhiming DONG, Liang LI, Jinghua SONG, Li DUAN. Parallel priority experience replay mechanism of MADDPG algorithm [J]. Systems Engineering and Electronics, 2021, 43(2): 420-433. |
| [5] | Jiayi LIU, Gang WANG, Jie ZHANG, Chuang WANG, Xituan SONG. Target optimal assignment model based on improved AGD-distributed multi-Agent system [J]. Systems Engineering and Electronics, 2020, 42(4): 863-870. |
| [6] | ZHOU Jian, GONG Chunlin, GU Liangxian, SU Hua. Distributed synchronization of leader-follower systems with unmatched uncertainties [J]. Systems Engineering and Electronics, 2019, 41(3): 636-642. |
| [7] | NI Peng1,2, LIU Jinmang1, FU Qiang1, GAO Jiale1. #br# Research on layered decisionmaking of multisensor planning based onheterogeneous MAS in antiTBM combat [J]. Systems Engineering and Electronics, 2016, 38(8): 1816-1825. |
| [8] | UN Yi-jie, ZHANG Guo-liang, ZHANG Sheng-xiu, ZENG Jing. Consensus analysis for a class of discrete-time heterogeneous multi-agent system in directed topology [J]. Systems Engineering and Electronics, 2015, 37(3): 693-699. |
| [9] | JIAO Yu-min,WANG Qiang,XU Ting,SU Jing. Multi-agent cooperation mechanism for intelligent virtual maintenance environment [J]. Journal of Systems Engineering and Electronics, 2013, 35(6): 1348-1352. |
| [10] | SHE Ying-ying,FANG Hua-jing . Finite-time tracking control for multi-agent systems [J]. Journal of Systems Engineering and Electronics, 2011, 33(8): 1871-1874. |
| [11] | LIU Yue-feng, ZHANG An. Cooperative task assignment method of manned/unmanned aerial vehicle formation [J]. Journal of Systems Engineering and Electronics, 2010, 32(3): 584-587. |
| [12] | YANG Ping, LIU Wei-dong, BI Yi-ming. Goal conflict resolution of multi-agent systems based on distributed negotiation evolution algorithm [J]. Journal of Systems Engineering and Electronics, 2009, 31(8): 1918-1922. |
| [13] | LI Wei-xiang, ZHANG Guang-ming, LI Bang-yi. Research on multi-attributes task allocation mechanism in MAS [J]. Journal of Systems Engineering and Electronics, 2009, 31(5): 1113-1116. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||