Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (2): 452-465.doi: 10.12305/j.issn.1001-506X.2021.02.20
• Systems Engineering • Previous Articles Next Articles
Behavior decision method of autonomous vehicle based on ontology and BN
Xue SUN1,2( ), Zhiqiu HUANG1,2,3(), Guohua SHEN1,2,3(), Jinyong WANG1,2(), Heng XU1,2()
), Zhiqiu HUANG1,2,3(), Guohua SHEN1,2,3(), Jinyong WANG1,2(), Heng XU1,2()
- 1. College of Computer Science and Technology, Nanjing University of Aeronautics and Astronautics, Nanjing 211016, China
2. Key Laboratory of Safety-Critical Software Ministry of Industry and Information Technology, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
3. Collaborative Innovation Center of Novel Software Technology and Industrialization, Nanjing 210093, China
-
Received:2019-12-24Online:2021-02-01Published:2021-03-16
CLC Number:
Cite this article
Xue SUN, Zhiqiu HUANG, Guohua SHEN, Jinyong WANG, Heng XU. Behavior decision method of autonomous vehicle based on ontology and BN[J]. Systems Engineering and Electronics, 2021, 43(2): 452-465.
share this article

Fig.1
Framework of behavior decision-making method"
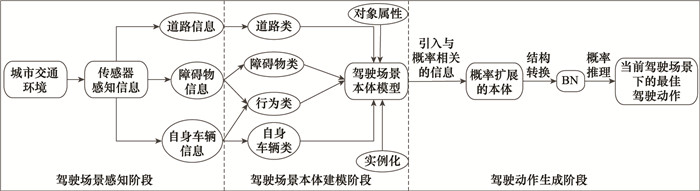

Fig.2
Hierarchy relationship of classes"
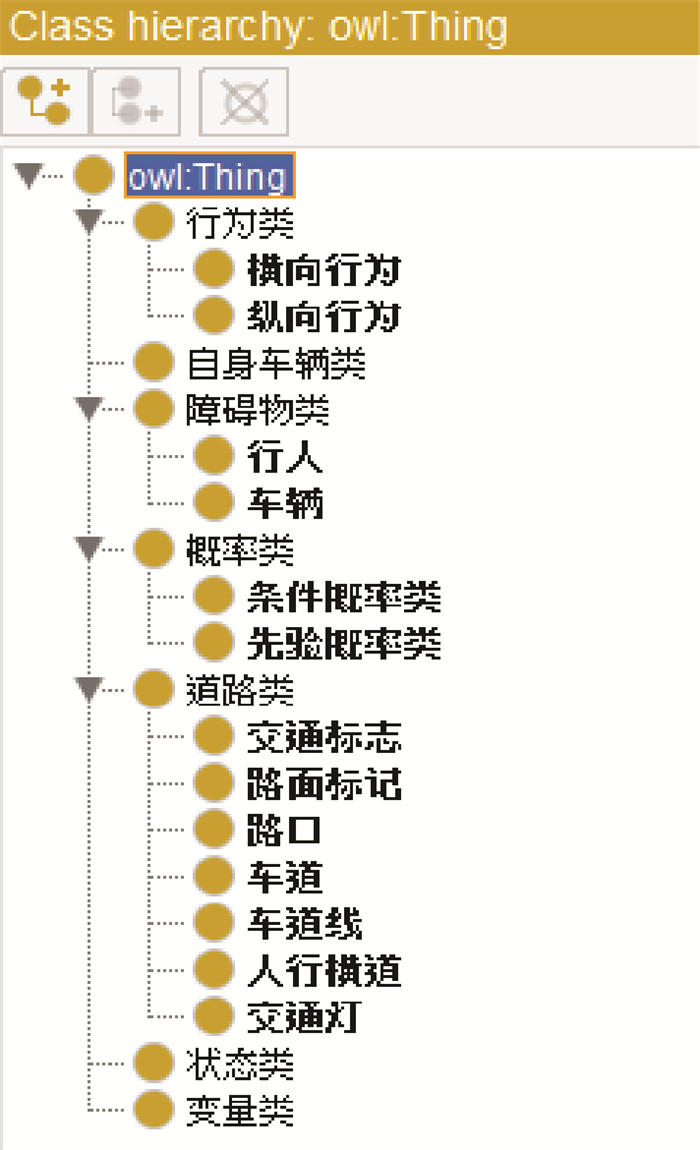
Table 1
Partial relational property"
| 属性名 | 定义域 | 值域 |
| 在车道上 | 自身车辆类 | 车道类 |
| 有左车道 | 车道类 | 车道类 |
| 有障碍物 | 障碍物类 | 自身车辆类 |
| 有左车道线 | 车道类 | 车道线类 |
| 执行驾驶行为 | 车辆类 | 行为类 |
| 左前方障碍物 | 自身车辆类 | 障碍物类 |
| 有道路标志 | 车道类 | 道路标志类 |
Table 2
Partial data property"
| 属性名 | 定义域 | 值域 |
| 当前速度 | 自身车辆类 | 双精度浮点型 |
| 可以左变道 | 自身车辆类 | 布尔型 |
| 车道数量 | 车道类 | 双精度浮点型 |
| 车道线类型 | 车道线类 | 字符型 |
| 与障碍物的距离 | 障碍物 | 双精度浮点型 |
| 与路口的距离 | 路口 | 双精度浮点型 |
| 与障碍物的相对速度 | 障碍物 | 双精度浮点型 |

Fig.3
Driving scenario"
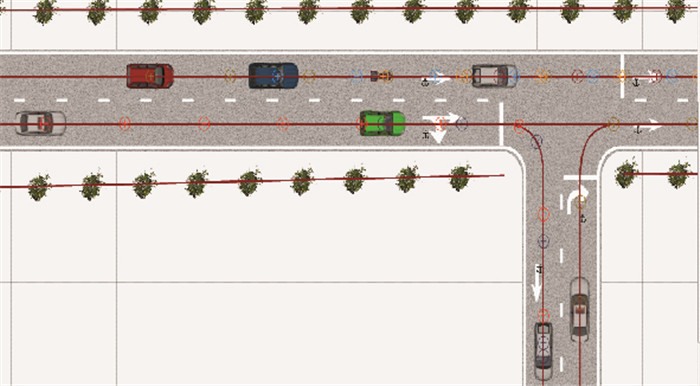

Fig.4
Class of Behavior"
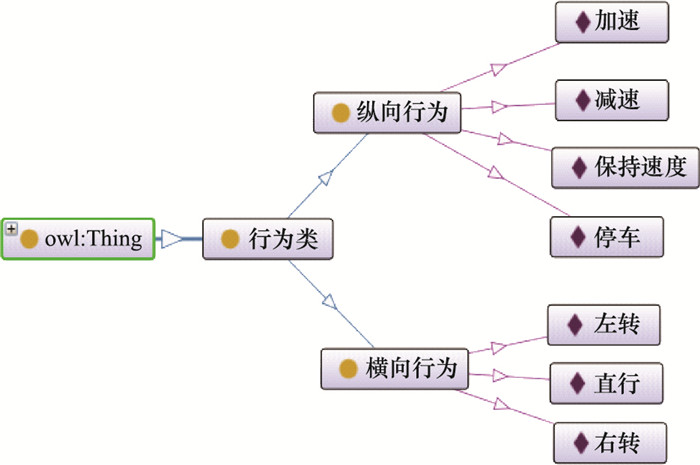

Fig.5
Class of Obstacle"
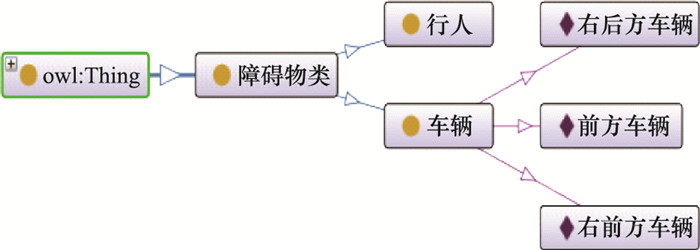

Fig.6
Class of Road"
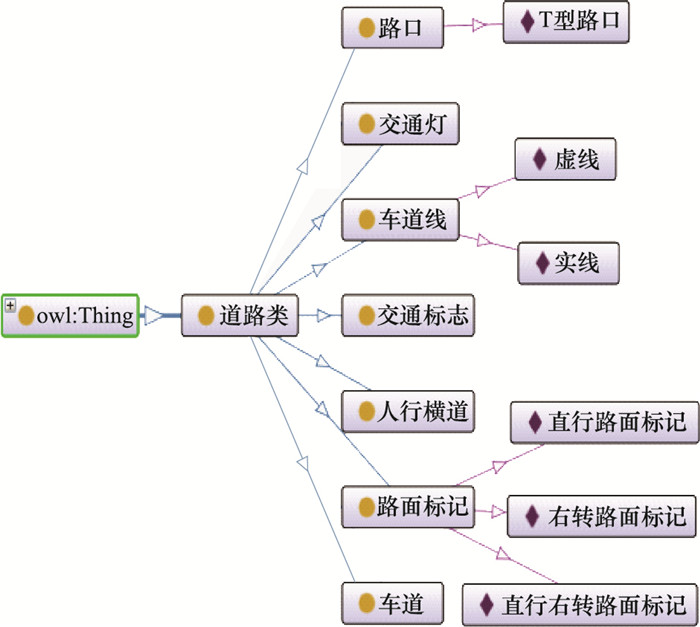

Fig.7
Ontology model structure of driving scenario"
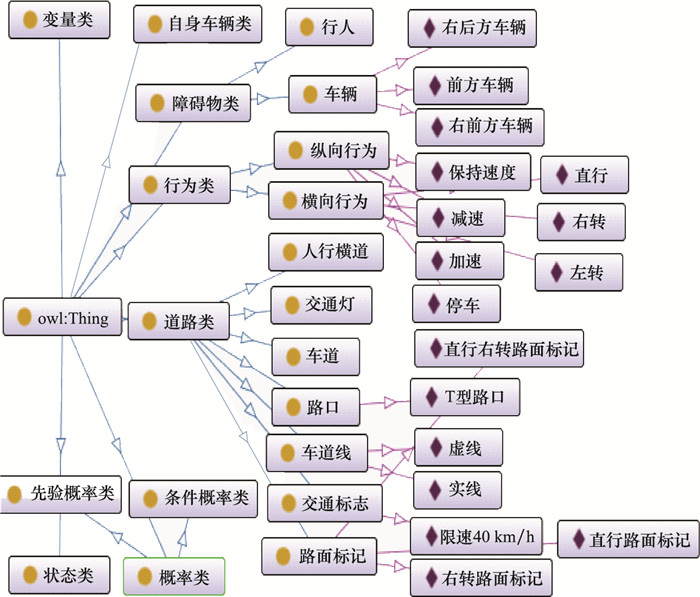
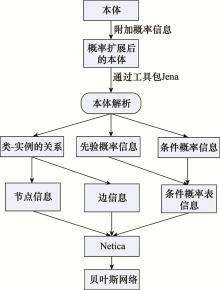
Fig.8
Conversion process"
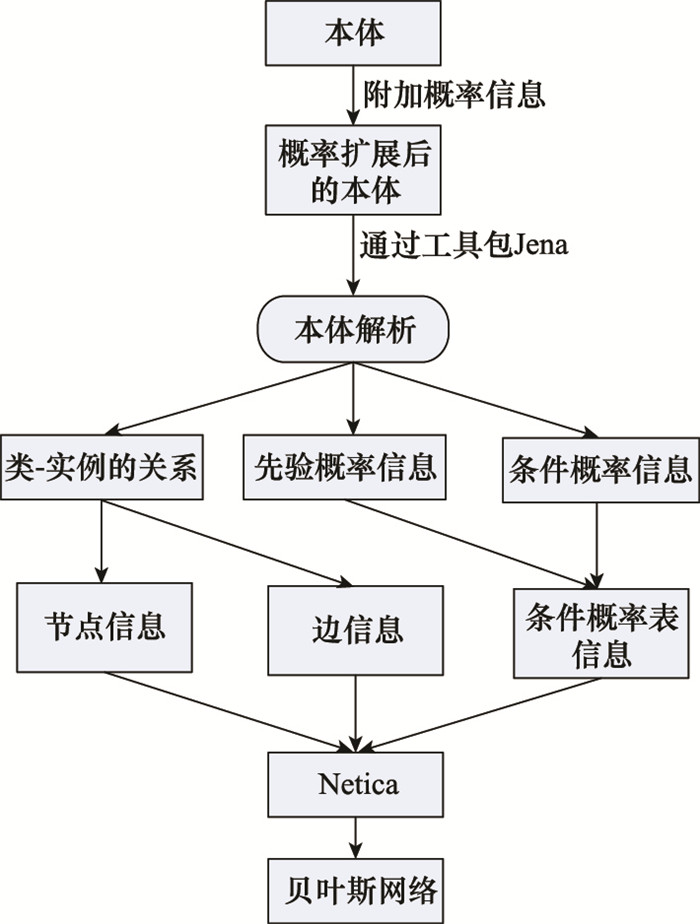

Fig.9
BN of T-junction driving scenario"
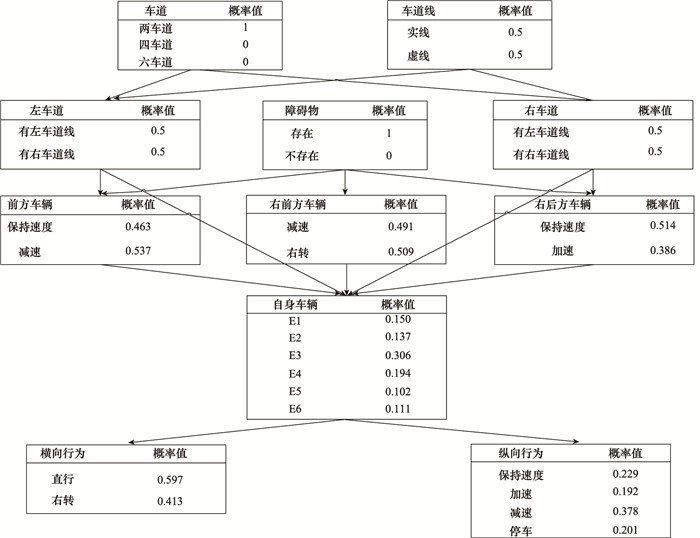
Table 3
Nodes of the BN and their meanings"
| 节点 | 节点含义 |
| 车道 | 道路车道数 |
| 车道线 | 道路线情况 |
| 障碍物 | 周围有无障碍车辆 |
| 左车道 | 车辆在左车道行驶 |
| 右车道 | 车辆在右车道行驶 |
| 前方车辆 | 无人驾驶车辆前方车辆可能采取的驾驶动作 |
| 右前方车辆 | 无人驾驶车辆右前方车辆可能采取的驾驶动作 |
| 右后方车辆 | 无人驾驶车辆右后方车辆可能采取的驾驶动作 |
| 自身车辆 | 无人驾驶车辆与周围车辆的相对速度和相对距离 |
| 横向行为 | 无人驾驶车辆可能采取的横向驾驶动作 |
| 纵向行为 | 无人驾驶车辆可能采取的纵向驾驶动作 |

Fig.10
Updated BN(a)"
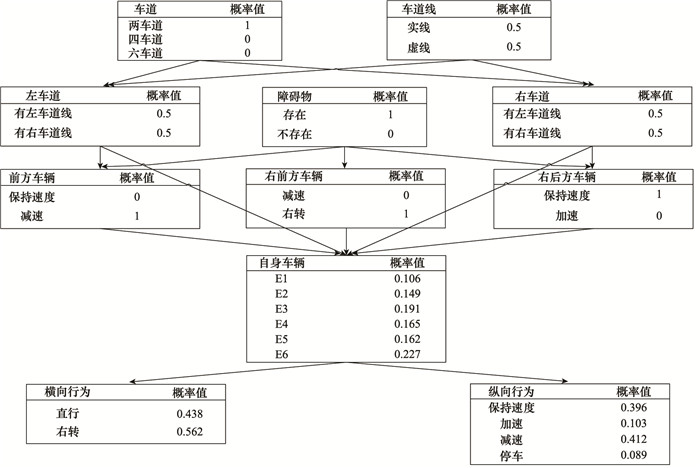

Fig.11
Updated BN (b)"
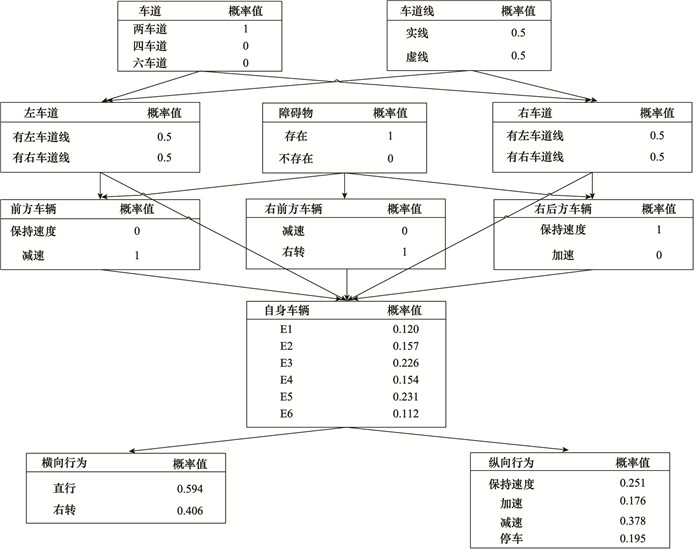
Fig.12
Steps of simulation experiment"
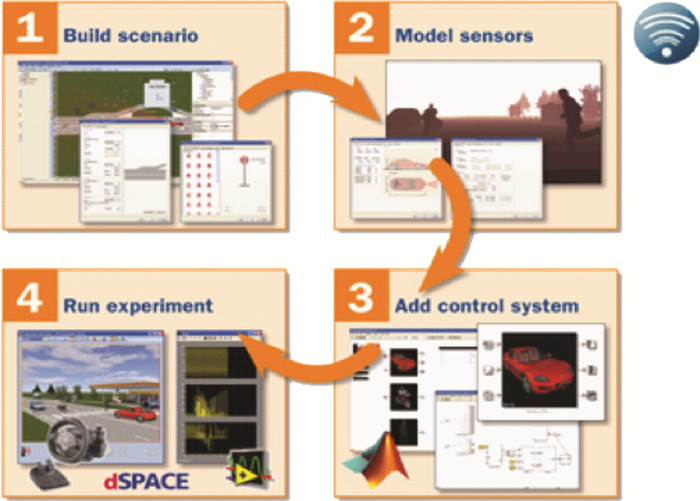

Fig.13
Simulation driving scenarios"
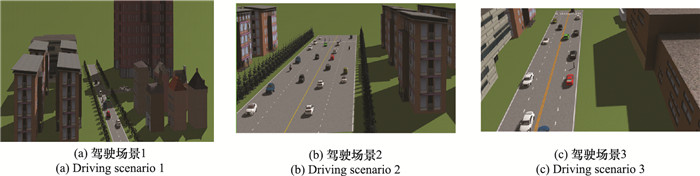
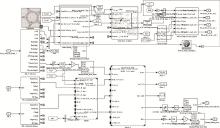
Fig.14
Dynamical model"
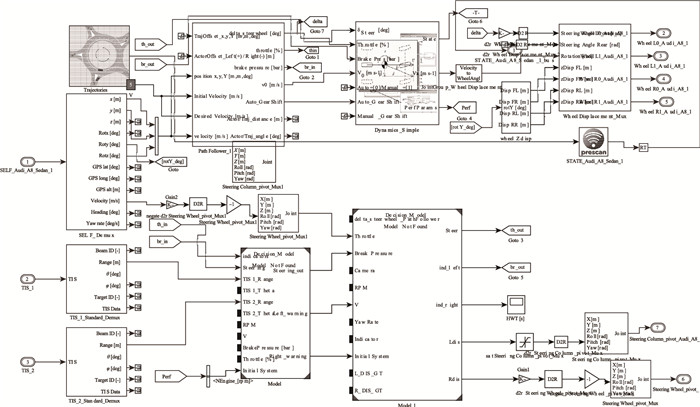
Fig.15
Acceleration in driving scenario 1"
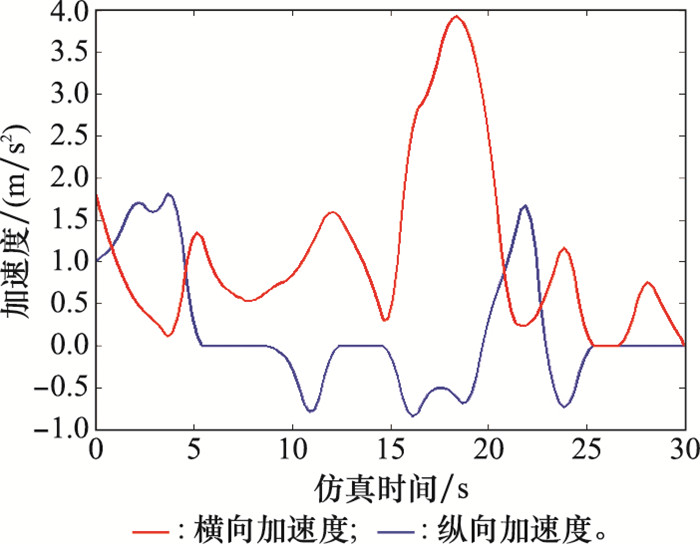

Fig.16
Driving actions in driving scenario 1"
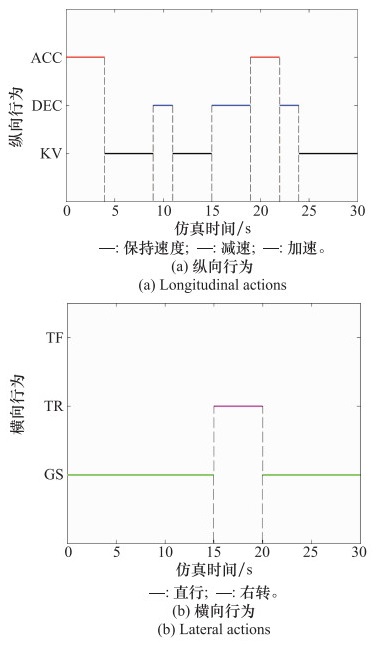

Fig.17
Trajectory in driving scenario 1"
Fig.18
Acceleration in driving scenario 2"
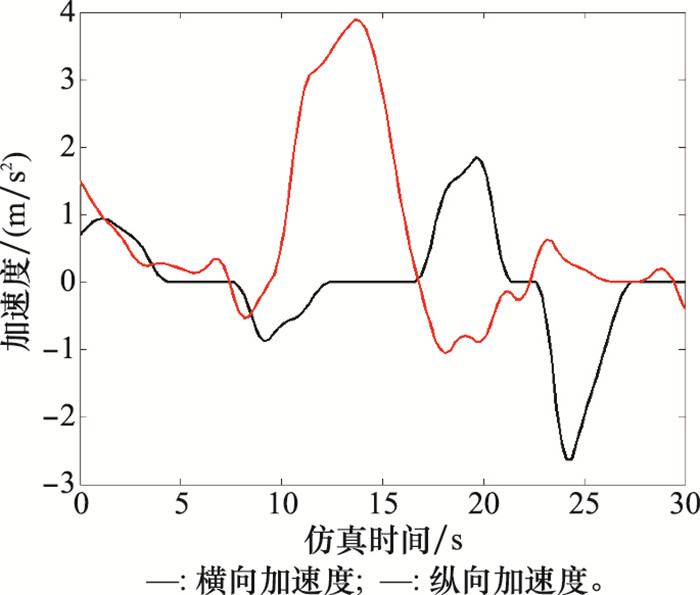

Fig.19
Driving actions in driving scenario 2"
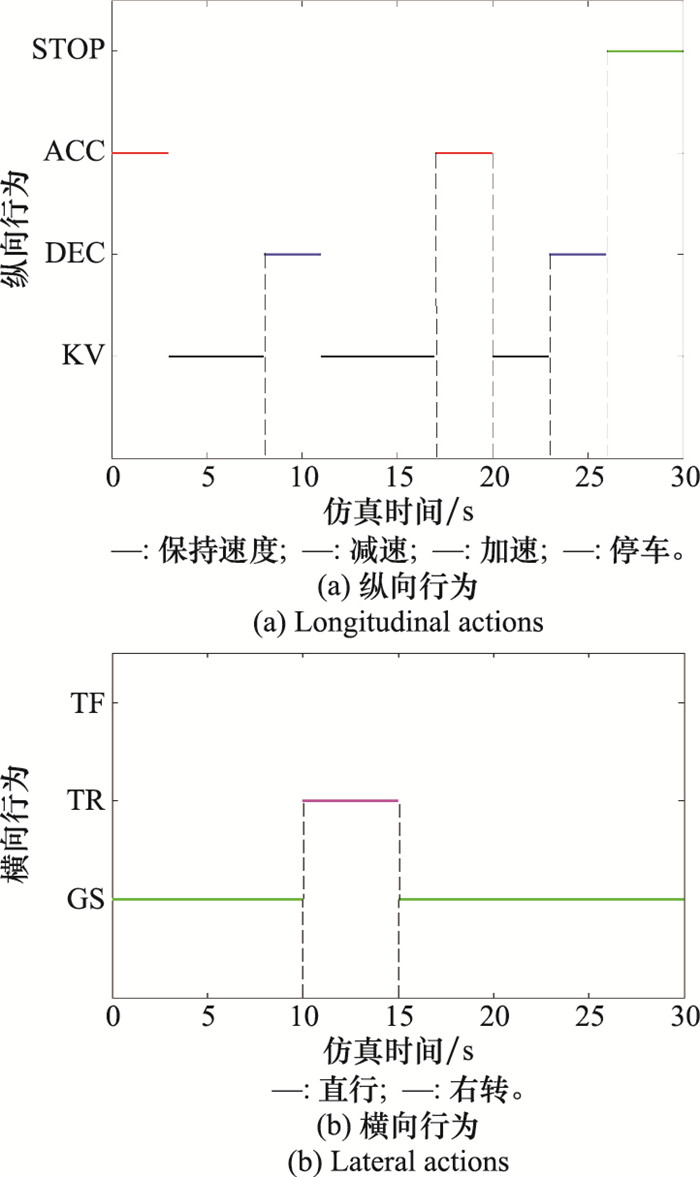

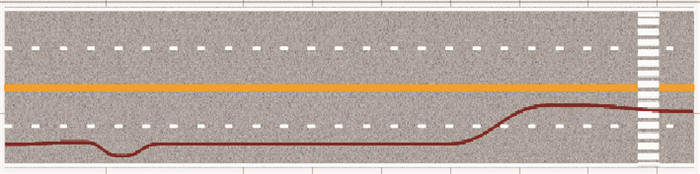
Fig.20
Trajectory in driving scenario 2"
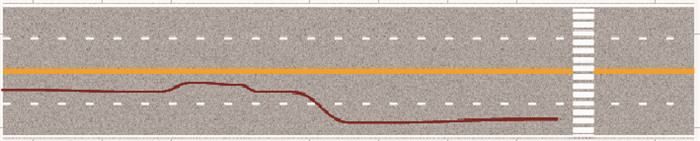
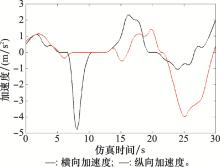
Fig.21
Acceleration in driving scenario 3"


Fig.22
Driving actions in driving scenario 3"
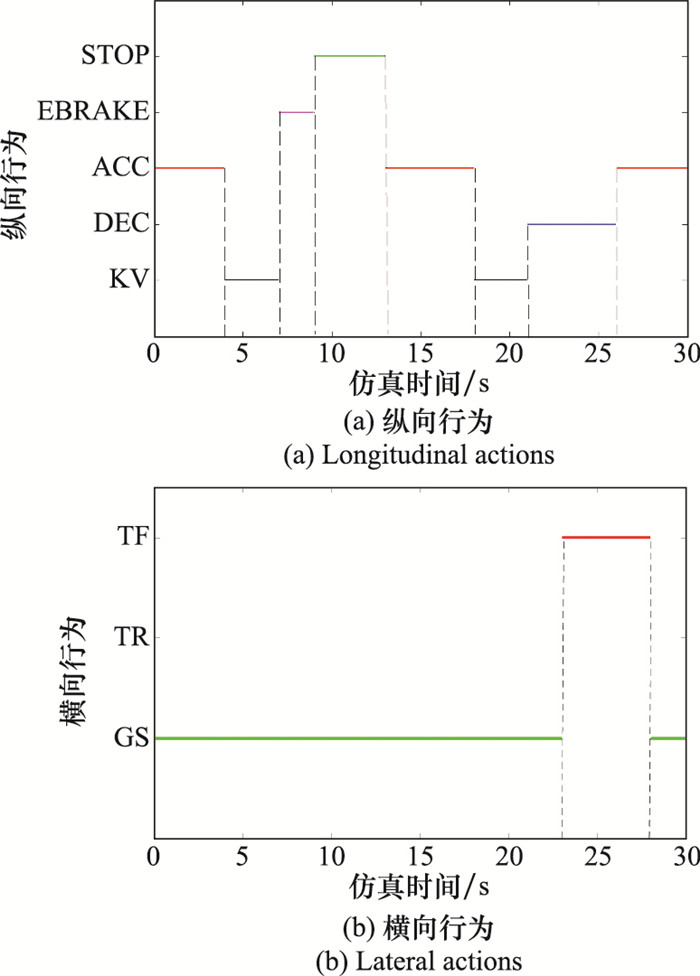

Fig.23
Trajectory in driving scenario 3"
| 1 | 耿新力.城区不确定环境下无人驾驶车辆行为决策方法研究[D].合肥:中国科学技术大学, 2017. |
| GENG X L. Research on decision-making method of autonomous vehicle behavior in uncertain environment of urban area[D]. Hefei: China University of Science and Technology, 2017. | |
| 2 |
GIPPS P G . A model for the structure of lane-changing decisions[J]. Transportation Research, 1986, 20 (5): 403- 414.
doi: 10.1016/0191-2615(86)90012-3 |
| 3 | GINDELE T, JAGSZENT D, PITZER B, et al. Design of the planner of team annieway's autonomous vehicle used in the darpa urban challenge[C]//Proc.of the Intelligent Vehicles Symposium, 2008: 1131-1136. |
| 4 | FURDA A , VLACIC L . Enabling safe autonomous driving in real-world city traffic using multiple criteria decision making[J]. Intelligent Transportation Systems, 2011, 3 (1): 4- 17. |
| 5 | AMAND A, FILLIAT D, GUZMAN J I. Ontology-based context awareness for driving assistance system[C]//Proc.of the Intelligent Vehicles Symposium, 2014: 227-233. |
| 6 | 黄璐.基于本体论的无人驾驶车辆场景评估与行为决策方法研究[D].合肥:中国科学技术大学, 2019. |
| HUANG L. Research on the method of the assessment and behavior decision-making of the autonomous vehicle based on ontology[D]. Hefei: China University of Science and Technology, 2019. | |
| 7 | ULBRICH S, MAURER M. Towards tactical lane change behavior planning for automated vehicles[C]//Proc.of the 18th Intelligent Transportation System, 2015: 989-995. |
| 8 | BRECHTEL S. Dynamic-making in continuous partially obser-vable domains: a novel method and its application for autonomous driving[D]. Karlsruhe: Karlsruhe Institute of Technologies, 2015. |
| 9 |
NOH S , AN K . Decision-making framework for automated driving in highway environments[J]. Transactions on Intelligent Transporation Systems, 2018, 19 (1): 58- 71.
doi: 10.1109/TITS.2017.2691346 |
| 10 | BOUTON M, COSGUN A, KOCHENDERF-ERE M J. Belief state planning for autonomously navigating urban intersections[C]//Proc.of the Intelligent Vehicles Symposium, 2017: 825-830. |
| 11 | SYZDYKBAYEV M, HAJARI H, KARIMI H A. Ontology for collaborative navigation among autonomous cars, drivers and pedestrians in smart cities[C]//Proc.of the 4th International Conference on Smart and Sustainable Technologies, 2019. |
| 12 | RON P , CRAIG S , STEPHEN B , et al. Ontology-based methods for enhancing autonomous vehicle path planning[J]. Robotics & Autonomous Systems, 2004, 49 (1): 123- 133. |
| 13 | YAO H F, WANG H J, LV H L, et al. Research on situation awareness based on ontology for UUV[C]//Proc.of the International Conference on Mechatronics and Automation, 2016: 2500-2506. |
| 14 | LU H, HUA W L, BIAO Y, et al. Ontology-based driving scene modeling, situation assessment and decision making for autonomous vehicles[C]//Proc.of the 4th Asia-Pacific Conference on Intelligent Robot Systems, 2019: 57-62. |
| 15 |
WANG Q , AYALEW B , WEISKIRCHER T . Predictive maneuver planning for an autonomous vehicle in public highway traffic[J]. Transactions on Intelligent Transportation System, 2019, 20 (4): 1303- 1315.
doi: 10.1109/TITS.2018.2848472 |
| 16 |
FERREIRA P H , LOUZADA F . Maximum likehood estimation for bivariate SUR Tobit modeling in presence of two right-censored dependent variables[J]. Communications in Statistics-Simulation and Computation, 2019, 48 (1): 150- 168.
doi: 10.1080/03610918.2017.1375521 |
| 17 |
BALAKRISHNAN N , ALAM F M A . Maximum likelihood estimation of the parameters of a multiple step-stress model from the Birnbaum-Saunders distribution under time-constraint: a comparative study[J]. Communications in Statistics-Simulation and Computation, 2019, 48 (5): 1535- 1559.
doi: 10.1080/03610918.2017.1414252 |
| 18 | 张什永.贝叶斯网不确定性推理研究[D].合肥:中国科学技术大学, 2010. |
| ZHANG S Y. Research on Bayesian networks of uncertain reasoning[D]. Hefei: China Unversity of Science and Technology, 2010. | |
| 19 | 杨喜权, 曹雪亚, 国頔娜, 等. 基于贝叶斯网络的本体不确定性推理[J]. 计算机应用, 2008, 28 (5): 1170- 1172. |
| YANG X Q , CAO X Y , GUO D N , et al. Ontology uncertainty reasoning based on bayesian networks[J]. Computer Application, 2008, 28 (5): 1170- 1172. | |
| 20 | LARIK A S, HAIDER S. Efforts to blend ontology with Bayesian networks: an overview[C]//Proc.of the International Conference on Advanced Computer Theory and Engineering, 2010: 598-602. |
| 21 | IBERRAKEN D, ADOUANE L, DENIS D. Safe autonomous overtaking maneuver based on inter-vehicular distance prediction and multi-level Bayesian decision-making[C]//Proc.of the International Conference on Intelligent Transportation Systems, 2018: 3259-3265. |
| 22 | KIM B , PARK K , YI K . Probabilistic threat assessment with environment description and rule-based multi-traffic prediction for integrated risk management system[J]. Intelligent Transportation Systems, 2017, 9 (3): 8- 22. |
| 23 | XIN Z , WEN L Y . A Bayesian network approach to causation analysis of road accidents using netica[J]. Advanced Transportation, 2017, 42 (3): 464- 472. |
| 24 | UUSITALO L . Advantages and challenges of Bayesian networks in environmental modelling[J]. Ecological Modelling, 2007, 203 (3): 312- 318. |
| 25 | KIM K , KIM B , LEE B , et al. Design of integerated risk management-based dynamic driving control of automated vehicles[J]. Intelligent Transportation Systems, 2017, 9 (1): 57- 73. |
| 26 | IBERRAKEN D, ADOUANE L, DENIS D. Multi-level Bayesian decision-making for safe and flexible autonomous navigation in highway environment[C]//Proc.of the International Conference on Intelligent Robots and Systems, 2018: 3984-3990. |
| 27 | PEREYRA M . Revisiting maximum-a-posteriori estimation in log-concave models[J]. Society for Industrial and Applied Mathematics, 2019, 12 (1): 650- 670. |
| 28 | XIONG G M, LI H, DING Z L. Subjective evaluation of vehicle active safety using prescan and simulink: lane departure warning system as an example[C]//Proc.of the International Conference on Vehicular Electronics and Safety, 2017: 208-213. |
| 29 | 孙忠潇. Simulink仿真及代码生成技术入门到精通[M]. 北京: 北京航空航天大学出版社, 2015: 140- 152. |
| SUN Z X . Simulation code generation technology from introduction to mastery[M]. Beijing: Beijing University of Aeronautics and Astronautics Press, 2015: 140- 152. | |
| 30 | CHEN X M, MIAO Y S, JIN M, et al. Driving decision-making analysis of lane-changing for autonomous vehicle under complex urban environment[C]//Proc.of the 29th Chinese Control and Decision Conference, 2017: 6878-6883. |
| [1] | Man LIU, Hongjun ZHANG, Youwei XU, Xinliang FENG, Yufang FENG. Research on behavior decision-making of multi entities in group-level wargame [J]. Systems Engineering and Electronics, 2022, 44(8): 2562-2569. |
| [2] | Yiyang LUO, Qingsong ZHAO, Huachao LI, Yong LI, Jianbin SUN. Framework and modeling method of weaponry utilization knowledge [J]. Systems Engineering and Electronics, 2022, 44(3): 841-849. |
| [3] | Weijian PANG, Hui LI, Qian HUANG, Peng LI, Xianming MA. Review on ontology-based task planning for unmanned systems [J]. Systems Engineering and Electronics, 2022, 44(3): 908-920. |
| [4] | Shuting WANG, Xiaobing LIU, Junhua ZHOU, Zhaoyang BAI, Xiang ZHAI. Ontology based knowledge representation and reuse method for complex product maintenance engineering cases [J]. Systems Engineering and Electronics, 2022, 44(2): 557-568. |
| [5] | Yanzhao LIU, Zhiqiu HUANG, Guohua SHEN, Jinyong WANG, Heng XU. Behavioral decision-making methods of autonomous vehicles based on decision tree and BN [J]. Systems Engineering and Electronics, 2022, 44(10): 3143-3154. |
| [6] | HE Hongyue, WANG Zhixue, LIANG Haomo, WANG Qinglong. Approach to mission modeling and analysis for system of systems based on ontology [J]. Systems Engineering and Electronics, 2018, 40(9): 1973-1978. |
| [7] | CHENG Kai, CHEN Gang, YIN Chengxiang, KANG Ruizhi, KANG Xingdang. Core ontology modeling and reasoning method for course of action [J]. Systems Engineering and Electronics, 2018, 40(4): 805-814. |
| [8] | SUN Yufei, MA Liangli, LV Minhui, QIN Jiwei. Improved co-training based ontology matching method [J]. Systems Engineering and Electronics, 2017, 39(2): 459-464. |
| [9] | MAI Qiang, WANG Ning, AN Shi, WANG Zhao. Risk management knowledge base for aerospace engineering#br# based on Ontology-based semantic modeling [J]. Systems Engineering and Electronics, 2016, 38(10): 2331-2337. |
| [10] | SU Zheng-lian, YAN Jun, CHEN Hai-song, ZENG Yong-hua. Construction of ontology based equipment fault knowledge base [J]. Systems Engineering and Electronics, 2015, 37(9): 2067-2072. |
| [11] | LI Kang, LI Xin-ming, LIU Dong. Modeling method for weapon system of systems structure based on semantic meta-model [J]. Systems Engineering and Electronics, 2015, 37(11): 2503-2512. |
| [12] | TAN Xian-si,ZHU Gang,WANG Hong,BI Hong-kui,GAO Ting3. Joint demonstration meta-model based on IDEAS [J]. Systems Engineering and Electronics, 2015, 37(1): 85-92. |
| [13] | HU Bo, WANG Zhi-xue, DONG Qing-chao. Context-aware modeling and reasoning based on OWL [J]. Journal of Systems Engineering and Electronics, 2012, 34(10): 2163-2168. |
| [14] | LIU Juan,TANG Su-yan,LI Qun,WANG Wei-ping. Research and application of an ontology for aircraft route planning [J]. Journal of Systems Engineering and Electronics, 2010, 32(6): 1258-1262. |
| [15] | LIU Zhong, QIAN Meng, HUANG Jin-cai, ZHANG Wei-ming. Semantic reasoning based approach to COA validation [J]. Journal of Systems Engineering and Electronics, 2010, 32(5): 988-993. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||