
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (8): 2807-2819.doi: 10.12305/j.issn.1001-506X.2024.08.28
• 制导、导航与控制 • 上一篇
邹玮琦, 牛朝阳, 刘伟, 王艳云, 湛嘉祺
收稿日期:2022-10-18
出版日期:2024-07-25
发布日期:2024-08-07
通讯作者:
牛朝阳
作者简介:邹玮琦(1998—), 男, 硕士研究生, 主要研究方向为认知干扰决策、协同干扰决策Weiqi ZOU, Chaoyang NIU, Wei LIU, Yanyun WANG, Jiaqi ZHAN
Received:2022-10-18
Online:2024-07-25
Published:2024-08-07
Contact:
Chaoyang NIU
摘要:
针对多目标突防组网雷达系统场景, 为有效提高干扰效果以及突防成功率, 编队航迹规划尤为重要。因此, 首先构建航迹规划模型, 从飞行器自身约束、航迹安全性、机间协调以及任务完成效果4个方面出发, 结合多机伴随式编队及其所处环境特点, 提出较为完备的航迹规划准则, 形成一个新的整体目标函数; 其次, 为有效描述每架飞机的机动特性以及伴飞干扰机与目标飞机间的联系, 提高算法搜索能力, 提出基于多球面矢量(multi-spherical vector-based, MS)方法; 为进一步提高算法的探索和开发能力, 提出多面球矢量逐航迹点学习混合粒子群优化(multi-spherical vector-based hybrid particle swarm optimization with track point by track point learning, TLHPSO)算法, 并将两者相结合, 形成基于多面球矢量的逐航迹点学习混合粒子群优化(MS-based hybrid particle swarm optimization with track point by track point learning, MS-TLHPSO)航迹规划方法; 最后, 构建相应仿真场景进行验证。对比结果表明, MS方法以及TLHPSO优化算法在寻优能力上具有明显优势; 同时, 所提算法在不同初始场景下最优解的平均值均优于其他算法, 充分说明所提算法能够在保证稳定性的前提下规划具有更高可信度的编队航迹。
中图分类号:
邹玮琦, 牛朝阳, 刘伟, 王艳云, 湛嘉祺. 面向组网雷达干扰任务的多机伴随式编队航迹预规划方法[J]. 系统工程与电子技术, 2024, 46(8): 2807-2819.
Weiqi ZOU, Chaoyang NIU, Wei LIU, Yanyun WANG, Jiaqi ZHAN. Multi-syndrome jammers formation trajectory preplanning method for netted radar jamming task[J]. Systems Engineering and Electronics, 2024, 46(8): 2807-2819.
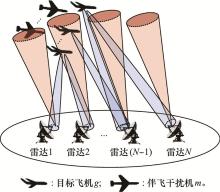
图1
多目标突防组网雷达场景"
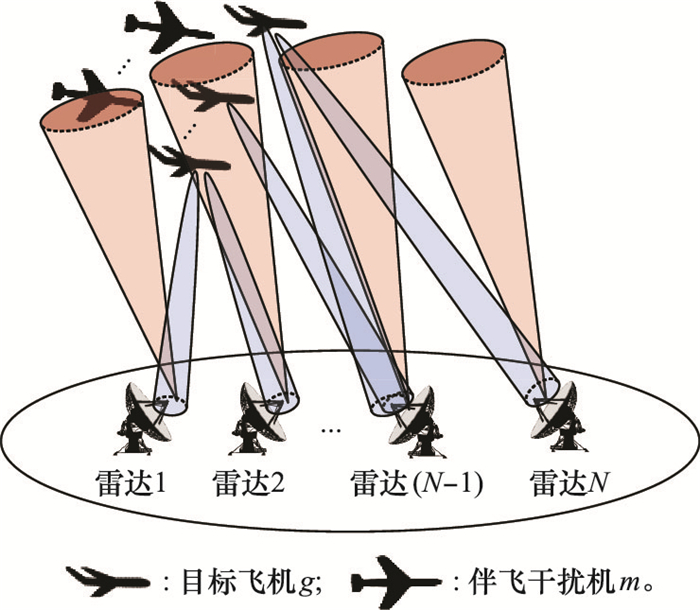
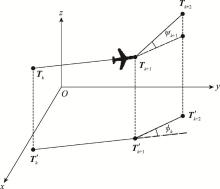
图2
转角和爬升角计算"
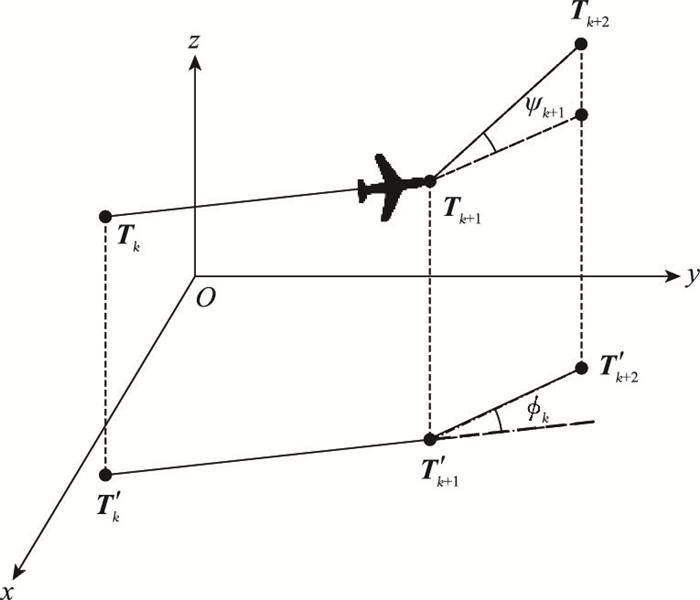
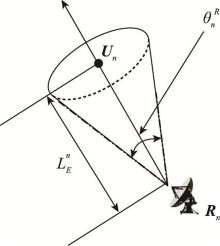
图3
雷达威胁范围模型"
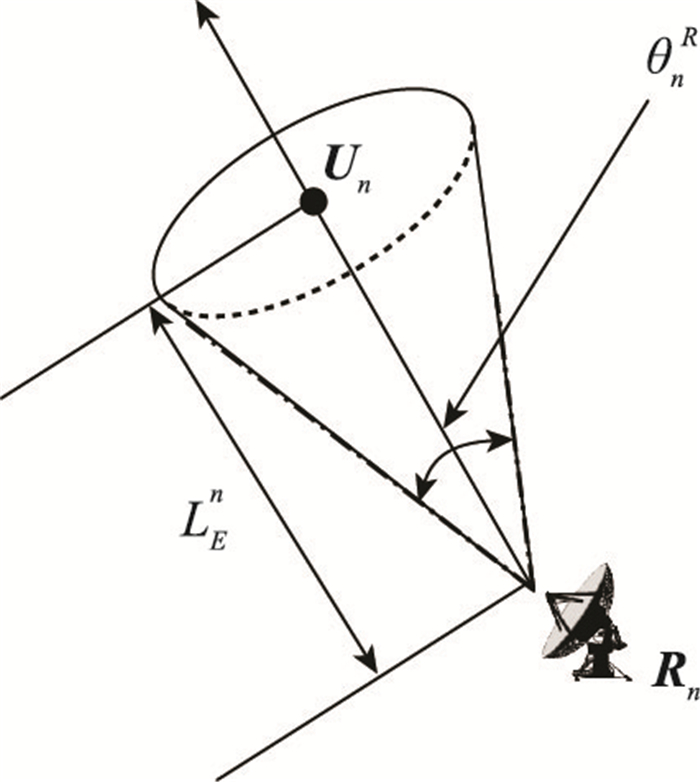
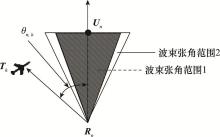
图4
雷达威胁成本的确定"

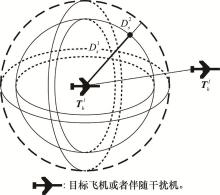
图5
机间安全范围"

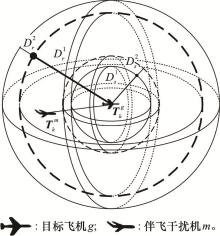
图6
目标飞机与对应伴飞干扰机的合理范围"
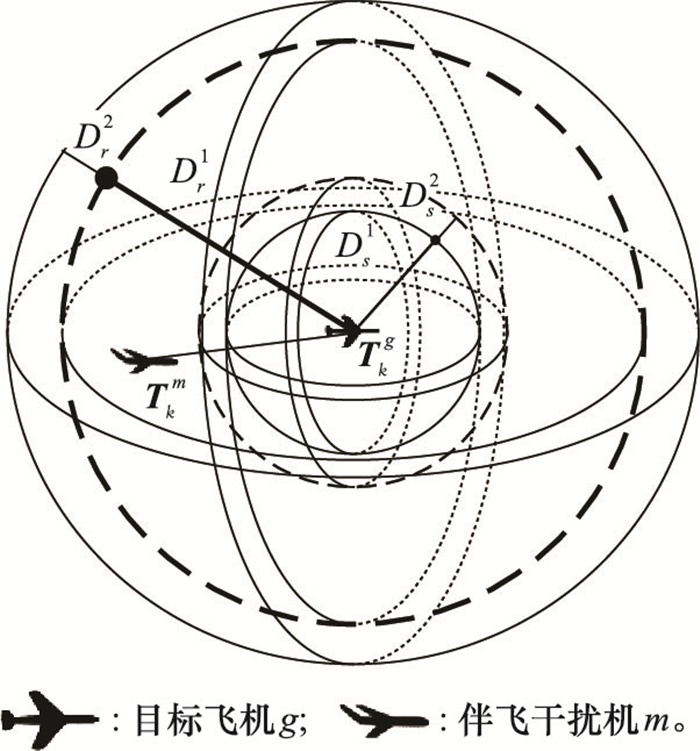
图7
两类向量示意图"
表1
MS-TLHPSO算法相关参数"
| 相关参数 | 具体数值 |
| 最大迭代次数Ger | 300 |
| 粒子数I | 100 |
| 惯性系数最大值Wmax | 1 |
| 惯性系数最小值Wmin | 0.4 |
| 学习因子最大值cmax | 2.5 |
| 学习因子最小值cmin | 1.5 |
| 评估周期T1 | 4 |
| 逐航迹点学习周期T2 | 50 |
表2
雷达威胁信息"
| 威胁类型 | 中心坐标 | 威胁距离 |
| 雷达节点1 | (2 000, 3 500) | 3 000 |
| 雷达节点2 | (3 500, 500) | 3 000 |
| 雷达节点3 | (4 500, 5 000) | 3 000 |
| 雷达节点4 | (4 500, 7 500) | 3 000 |
| 雷达节点5 | (6 600, 2 000) | 3 000 |
| 雷达节点6 | (8 000, 5 500) | 3 000 |
表3
多机伴随式编队起点和终点坐标"
| 案例 | 威胁类型 | 起点坐标 | 终点坐标 |
| 案例1 | 目标飞机1 | (2 000, 1 000, 1 500) | (4 850, 7 900, 1 600) |
| 伴飞干扰机1 | (2 040, 970, 1 460) | (4 890, 7 870, 1 560) | |
| 伴飞干扰机2 | (1 960, 1 040, 1 450) | (4 820, 7 930, 1 560) | |
| 目标飞机2 | (5 500, 1 100, 1 700) | (5 000, 8 000, 1 500) | |
| 伴飞干扰机3 | (5 460, 1 070, 1 650) | (4 970, 7 970, 1 460) | |
| 案例2 | 目标飞机1 | (1 000, 5 000, 1 500) | (7 700, 8 000, 1 600) |
| 伴飞干扰机1 | (1 030, 4 970, 1 460) | (7 730, 7 970, 1 560) | |
| 伴飞干扰机2 | (960, 5 030, 1 460) | (7 670, 8 030, 1 560) | |
| 目标飞机2 | (2 000, 1 000, 1 600) | (8 000, 7 700, 1 500) | |
| 伴飞干扰机3 | (1 970, 970, 1 560) | (7 970, 7 670, 1 460) |

图8
MS-TLHPSO算法航迹规划结果图"

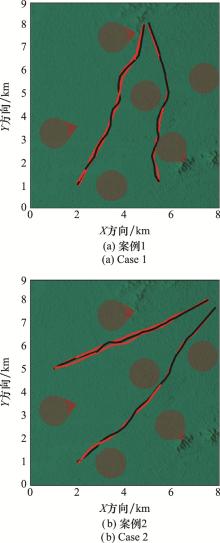
图9
MS-TLHPSO算法航迹规划结果平面投影图"


图10
不同算法收敛曲线对比图"


图11
最优解折线图"

表4
最优解的各项指标(案例1)"
| 算法 | 最佳值 | 最差值 | 平均值 | 标准值 |
| PSO | 61 408.48 | 121 548.60 | 97 988.52 | 14 890.010 |
| HIPSO-MSOS | 71 944.86 | 115 643.50 | 88 804.44 | 11 697.120 |
| TLHPSO | 53 232.81 | 96 403.49 | 75 743.96 | 12 239.290 |
| MSPSO | 38 532.29 | 77 287.50 | 49 390.56 | 9 067.083 |
| MS-HIPSO-MSOS | 34 992.36 | 52 625.60 | 40 684.50 | 4 381.268 |
| MS-TLHPSO | 28 267.81 | 34 743.45 | 31 519.64 | 1 770.986 |
表5
最优解的各项指标(案例2)"
| 算法 | 最佳值 | 最差值 | 平均值 | 标准值 |
| PSO | 77 337.96 | 111 948.1 | 92 770.48 | 10 825.57 |
| HIPSO-MSOS | 67 573.74 | 108 921.2 | 85 384.60 | 11 694.55 |
| TLHPSO | 49 503.04 | 92 075.05 | 68 768.80 | 11 709.960 |
| MSPSO | 35 662.75 | 49 534.39 | 40 123.17 | 3 826.639 |
| MS-HIPSO-MSOS | 31 403.77 | 41 296.28 | 34 359.15 | 2 988.954 |
| MS-TLHPSO | 29 013.56 | 36 412.56 | 31 575.41 | 2 098.378 |
表6
不同初始场景下各算法最优解的平均值"
| 初始场景设置 | 算法 | |||||||||
| 目标飞机数量 | 伴飞干扰机数量 | 障碍威胁数量 | 雷达威胁数量 | PSO | HIPSO-MSOS | TLHPSO | MSPSO | MS-HIPSO-MSOS | MS-TLHPSO | |
| 2 | 5 | 2 | 5 | 112 021.8 | 102 047.3 | 88 304.52 | 58 416.52 | 45 616.73 | 36 981.38 | |
| 2 | 5 | 3 | 5 | 124 920.8 | 112 531.7 | 98 072.05 | 62 730.71 | 43 647.15 | 39 319.46 | |
| 2 | 5 | 2 | 6 | 134 623.2 | 122 112.4 | 105 192.8 | 65 916.11 | 54 213.27 | 40 541.88 | |
| 2 | 5 | 3 | 6 | 139 458.3 | 126 480.2 | 106 159.8 | 70 790.07 | 54 569.38 | 42 264.37 | |
| 3 | 8 | 2 | 7 | 143 154.3 | 129 523.3 | 108 216.8 | 70 764.17 | 55 080.31 | 43 629.74 | |
| 3 | 8 | 3 | 7 | 161 610.2 | 144 658.9 | 114 317.2 | 77 080.74 | 55 089.16 | 44 525.14 | |
| 3 | 8 | 2 | 8 | 176 181.7 | 159 536.2 | 125 512.2 | 93 452.32 | 65 466.46 | 55 514.68 | |
| 3 | 8 | 3 | 8 | 189 767.2 | 171 007.3 | 138 266.4 | 93 887.86 | 67 802.71 | 57 264.87 | |
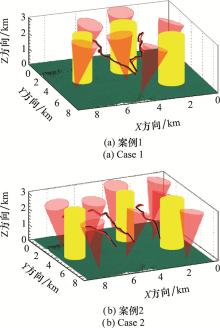
图12
不同初始场景下航迹规划结果图"

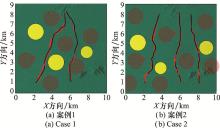
图13
不同初始场景下航迹规划结果平面投影图"

表7
协同干扰效果成本J6的变化情况"
| 案例 | 航迹未偏离情况下协同干扰效果成本 | 航迹存在偏离情况下协同干扰效果成本(20组实验) | ||
| 最大值 | 最小值 | 平均值 | ||
| 案例1 | 3 619.90 | 3 620.75 | 3 620.07 | 3 620.41 |
| 案例2 | 5 427.64 | 5 428.95 | 5 427.75 | 5 428.05 |
| 3 | LEE K S, OVINIS M, NAGARAJAN T, et al. Autonomous patrol and surveillance system using unmanned aerial vehicles[C]//Proc. of the IEEE 15th International Conference on Environment and Electrical Engineering, 2015: 1291-1297. |
| 4 | SONG B D , PARK K , KIM J .Persistent UAV delivery logistics: MILP formulation and efficient heuristic[J].Computers & Industrial Engineering,2018,120,418-428. |
| 5 | 杜云, 贾慧敏, 邵士凯, 等.面向多目标侦察任务的无人机航线规划[J].控制与决策,2021,36(5):1191-1198. |
| DU Y , JIA H M , SHAO S K , et al.UAV trajectory planning for multi-target reconnaissance missions[J].Control and Decision,2021,36(5):1191-1198. | |
| 6 | ZHANG H , XIN B , DOU L H , et al.A review of cooperative path planning of an unmanned aerial vehicle group[J].Frontiers of Information Technology & Electronic Engineering,2020,21(12):1671-1694. |
| 7 |
CHEN Q Y , LU Y F , JIA G W , et al.Path planning for UAVs formation reconfiguration based on Dubins trajectory[J].Journal of Central South University,2018,25(11):2664-2676.
doi: 10.1007/s11771-018-3944-z |
| 8 |
LIU Y , ZHANG X J , ZHANG Y , et al.Collision free 4D path planning for multiple UAVs based on spatial refined voting mechanism and PSO approach[J].Chinese Journal of Aeronautics,2019,32(6):1504-1519.
doi: 10.1016/j.cja.2019.03.026 |
| 9 | LIU W, ZHENG Z, CAI K Y. Distributed on-line path planner for multi-UAV coordination using bi-level programming[C]//Proc. of the IEEE 25th Chinese Control and Decision Confe-rence, 2013: 5128-5133. |
| 10 | BOUZID Y , BESTAOUI Y , SIGUERDIDJANE H .Guidance-control system of a quadrotor for optimal coverage in cluttered environment with a limited onboard energy: complete software[J].Journal of Intelligent & Robotic Systems,2019,95(2):707-730. |
| 11 |
SHAO S , SHI W , ZHAO Y , et al.A new method of solving UAV trajectory planning under obstacles and multi-constraint[J].IEEE Access,2021,9,161161-161180.
doi: 10.1109/ACCESS.2021.3132650 |
| 12 |
CHAI X Z , ZHENG Z S , XIAO J M , et al.Multi-strategy fusion differential evolution algorithm for UAV path planning in complex environment[J].Aerospace Science and Technology,2022,121,107287.
doi: 10.1016/j.ast.2021.107287 |
| 13 |
HE W J , QI X G , LIU L F .A novel hybrid particle swarm optimization for multi-UAV cooperate path planning[J].Applied Intelligence,2021,51(10):7350-7364.
doi: 10.1007/s10489-020-02082-8 |
| 1 | 张养瑞. 对组网雷达的多机伴随式协同干扰技术研究[D]. 北京: 北京理工大学, 2015. |
| ZHANG Y R. Research on key technologies of cooperative ECM in multi-syndrome jammers for countering radar net[D]. Beijing: Beijing Institute of Technology, 2015. | |
| 2 |
DENG C , WANG S W , HUANG Z , et al.Unmanned aerial vehicles for power line inspection: a cooperative way in platforms and communications[J].Journal of Communications,2014,9(9):687-692.
doi: 10.12720/jcm.9.9.687-692 |
| 14 |
CHENG X M , CAO D , LI C T .Survey of cooperative path planning for multiple unmanned aerial vehicles[J].Applied Mechanics and Materials,2014,668/669,388-393.
doi: 10.4028/www.scientific.net/AMM.668-669.388 |
| 15 |
ZHANG D F , DUAN H B .Social-class pigeon-inspired optimization and time stamp segmentation for multi-UAV cooperative path planning[J].Neurocomputing,2018,313,229-246.
doi: 10.1016/j.neucom.2018.06.032 |
| 16 |
WANG Z , LIU L , LONG T .Minimum-time trajectory planning for multi-unmanned-aerial-vehicle cooperation using sequential convex programming[J].Journal of Guidance, Control, and Dynamics,2017,40(11):2976-2982.
doi: 10.2514/1.G002349 |
| 17 | WU Q P, ZHOU S L, YAN S, et al. A cooperative region surveillance strategy for multiple UAVs[C]//Proc. of the IEEE Chinese Guidance, Navigation and Control Conference, 2014: 1744-1748. |
| 18 |
ZHEN Z Y , XING D G , GAO C .Cooperative search-attack mission planning for multi-UAV based on intelligent self-organi- zed algorithm[J].Aerospace Science and Technology,2018,76,402-411.
doi: 10.1016/j.ast.2018.01.035 |
| 19 |
杨旭, 王锐, 张涛.面向无人机集群路径规划的智能优化算法综述[J].控制理论与应用,2020,37(11):2291-2302.
doi: 10.7641/CTA.2020.00105 |
|
YANG X , WANG R , ZHANG T .Review of unmanned aerial vehicle swarm path planning based on intelligent optimization[J].Control Theory & Applications,2020,37(11):2291-2302.
doi: 10.7641/CTA.2020.00105 |
|
| 20 | 赵畅, 刘允刚, 陈琳, 等.面向元启发式算法的多无人机路径规划现状与展望[J].控制与决策,2022,37(5):1102-1115. |
| ZHAO C , LIU Y G , CHEN L , et al.Research and development trend of multi-UAV path planning based on metaheuristic algorithm[J].Control and Decision,2022,37(5):1102-1115. | |
| 21 |
程凝怡, 刘志乾, 李昱奇.一种基于Dijkstra的多约束条件下智能飞行器航迹规划算法[J].西北工业大学学报,2020,38(6):1284-1290.
doi: 10.3969/j.issn.1000-2758.2020.06.018 |
|
CHENG N Y , LIU Z Q , LI Y Q .A Dijkstra based intelligent aircraft with multiple constraints track planning algorithm[J].Journal of Northwestern Polytechnical University,2020,38(6):1284-1290.
doi: 10.3969/j.issn.1000-2758.2020.06.018 |
|
| 22 | LIU X, GONG D X. A comparative study of A-star algorithms for search and rescue in perfect maze[C]//Proc. of the IEEE International Conference on Electric Information and Control Engineering, 2011: 24-27. |
| 23 |
SONG R , LIU Y C , BUCKNALL R .Smoothed A * algorithm for practical unmanned surface vehicle path planning[J].Applied Ocean Research,2019,83,9-20.
doi: 10.1016/j.apor.2018.12.001 |
| 24 | YERSHOVA A, JAILLET L, SIMÉON T, et al. Dynamic-domain RRTs: efficient exploration by controlling the sampling domain[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2005: 3856-3861. |
| 25 | SUN Q P, LI M, WANG T H, et al. UAV path plan-ning based on improved rapidly-exploring random tree[C]//Proc. of the Chinese Control and Decision Conference, 2018: 6420-6424. |
| 26 |
BEHNCK L P , DOERING D , PEREIRA C E , et al.A modified simulated annealing algorithm for UAVs path planning[J].IFAC-Papersonline,2015,48(10):63-68.
doi: 10.1016/j.ifacol.2015.08.109 |
| 27 |
ZENG X P , LI Y M , QIN J .A dynamic chain-like agent gene-tic algorithm for global numerical optimization and feature selec- tion[J].Neurocomputing,2009,72(4-6):1214-1228.
doi: 10.1016/j.neucom.2008.02.010 |
| 28 |
TSAI C C , HUANG H C , CHAN C K .Parallel elite genetic algorithm and its application to global path planning for autonomous robot navigation[J].IEEE Trans.on Industrial Electro-nics,2011,58(10):4813-4821.
doi: 10.1109/TIE.2011.2109332 |
| 29 |
ZHONG L , LUO Q , WEN D , et al.A task assignment algorithm for multiple aerial vehicles to attack targets with dynamic values[J].IEEE Trans.on Intelligent Transportation Systems,2013,14(1):236-248.
doi: 10.1109/TITS.2012.2210882 |
| 30 |
WU H S , LI H , XIAO R B , et al.Modeling and simulation of dynamic ant colony's labor division for task allocation of UAV swarm[J].Physica A: Statistical Mechanics and its Applications,2018,491,127-141.
doi: 10.1016/j.physa.2017.08.094 |
| 31 | CHEN D B , ZHAO C X .Particle swarm optimization based on endocrine regulation mechanism[J].Control Theory and Applications,2007,24(6):126-134. |
| 32 | ZHANG Q R, GU G C. Path planning based on improved binary particle swarm optimization algorithm[C]//Proc. of the IEEE Conference on Robotics, Automation and Mechatronics, 2008: 462-466. |
| 33 |
ZHANG X Y , DUAN H B .An improved constrained differential evolution algorithm for unmanned aerial vehicle global route planning[J].Applied Soft Computing,2015,26,270-284.
doi: 10.1016/j.asoc.2014.09.046 |
| 34 | ALJARAH I, LUDWIG S A. A new clustering approach based on glowworm swarm optimization[C]//Proc. of the IEEE Congress on Evolutionary Computation, 2013: 2642-2649. |
| 35 |
GOEL U , VARSHNEY S , JAIN A , et al.Three dimension path planning for UAVs in dynamic environment using glow-worm swarm optimization[J].Procedia Computer Science,2018,133,230-239.
doi: 10.1016/j.procs.2018.07.028 |
| 36 |
SONG P C , PAN J S , CHU S C .A parallel compact cuckoo search algorithm for three-dimensional path planning[J].Applied Soft Computing,2020,94,106443.
doi: 10.1016/j.asoc.2020.106443 |
| 37 |
GAING Z L .Particle swarm optimization to solving the economic dispatch considering the generator constraints[J].IEEE Trans.on Power Systems,2003,18(3):1187-1195.
doi: 10.1109/TPWRS.2003.814889 |
| 38 |
LALWANI S , SHARMA H , SATAPATHY S C , et al.A survey on parallel particle swarm optimization algorithms[J].Arabian Journal for Science and Engineering,2019,44(4):2899-2923.
doi: 10.1007/s13369-018-03713-6 |
| 39 |
SANCHEZ-GARCIA J , REINA D G , TORAL S L .A distributed PSO-based exploration algorithm for a UAV network assisting a disaster scenario[J].Future Generation Computer Systems—the International Journal of Escience,2019,90,129-148.
doi: 10.1016/j.future.2018.07.048 |
| 40 |
SHAO S K , PENG Y , HE C L , et al.Efficient path planning for UAV formation via comprehensively improved particle swarm optimization[J].ISA Transactions,2020,97,415-430.
doi: 10.1016/j.isatra.2019.08.018 |
| 41 |
AHMED G , SHELTAMI T , MAHMOUD A , et al.IoD swarms collision avoidance via improved particle swarm optimization[J].Transportation Research Part A: Policy and Practice,2020,142,260-278.
doi: 10.1016/j.tra.2020.09.005 |
| 42 |
PHUNG M D , HA Q P .Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization[J].Applied Soft Computing,2021,107,107376.
doi: 10.1016/j.asoc.2021.107376 |
| 43 |
SHAO Z , YAN F , ZHOU Z , et al.Path planning for multi-UAV formation rendezvous based on distributed cooperative particle swarm optimization[J].Applied Sciences,2019,9(13):2621.
doi: 10.3390/app9132621 |
| 44 |
WANG Y B , BAI P , LIANG X L , et al.Reconnaissance mission conducted by UAV swarms based on distributed PSO path planning algorithms[J].IEEE Access,2019,7,105086-105099.
doi: 10.1109/ACCESS.2019.2932008 |
| 45 | HAGHIGHI H , SADATI S H , DEHGHAN S M M , et al.Hybrid form of particle swarm optimization and genetic algorithm for optimal path planning in coverage mission by cooperated unmanned aerial vehicles[J].Journal of Aerospace Technology and Management,2020,12,e4320. |
| 46 |
LIU Y , ZHANG X J , ZHANG Y , et al.Collision free 4D path planning for multiple UAVs based on spatial refined voting mechanism and PSO approach[J].Chinese Journal of Aeronautics,2019,32(6):1504-1519.
doi: 10.1016/j.cja.2019.03.026 |
| 47 | 张大琳, 易伟, 孔令讲.面向组网雷达干扰任务的多干扰机资源联合优化分配方法[J].雷达学报,2021,10(4):595-606. |
| ZHANG D L , YI W , KONG L J .Optimal joint allocation of multi jammer resources for jamming netted radar system[J].Journal of Radars,2021,10(4):595-606. | |
| 48 |
DAUM F .Radar handbook[J].IEEE Aerospace and Electronic Systems Magazine,2008,23(5):41.
doi: 10.1109/MAES.2008.4523916 |
| 49 |
LIU W , WANG Y L , LIU J , et al.Performance analysis of adaptive detectors for point targets in subspace interference and Gaussian noise[J].IEEE Trans.on Aerospace and Electronic Systems,2018,54(1):429-441.
doi: 10.1109/TAES.2017.2760718 |
| 50 |
FANG Z X , WEI Z Q , CHEN X , et al.Stochastic geometry for automotive radar interference with RCS characteristics[J].IEEE Wireless Communications Letters,2020,9(11):1817-1820.
doi: 10.1109/LWC.2020.3003064 |
| 51 |
YI W , YUAN Y , HOSEINNEZHAD R , et al.Resource scheduling for distributed multi-target tracking in netted colocated MIMO radar systems[J].IEEE Trans.on Signal Processing,2020,68,1602-1617.
doi: 10.1109/TSP.2020.2976587 |
| [1] | 卓娅玲, 李响, 左磊, 胡娟. 随机数据丢包情况下组网雷达功率分配算法[J]. 系统工程与电子技术, 2024, 46(6): 1957-1966. |
| [2] | 陆德江, 王星, 陈游, 胡星. 联合多种资源协同干扰组网雷达系统的自适应调度方法[J]. 系统工程与电子技术, 2023, 45(9): 2744-2754. |
| [3] | 龚树凤, 龙伟军, 贲德, 潘明海. 组网雷达自适应模糊CFAR检测融合算法[J]. 系统工程与电子技术, 2022, 44(1): 100-107. |
| [4] | 黄天奇, 王布宏, 田继伟. 集中式组网雷达的假目标欺骗干扰优化方法[J]. 系统工程与电子技术, 2020, 42(7): 1484-1490. |
| [5] | 胡晓伟, 童宁宁, 王建业, 丁姗姗, 赵小茹. 基于组网雷达的空间旋转对称进动目标三维重构[J]. 系统工程与电子技术, 2016, 38(10): 2281-2286. |
| [6] | 李 飞,周中良,苟新禹,陈中起. 基于多机协同航迹欺骗的组网雷达突防技术[J]. 系统工程与电子技术, 2013, 35(11): 2309-2313. |
| [7] | 李世忠, 王国宏, 吴巍,徐海全. 分布式干扰下组网雷达目标检测与跟踪技术[J]. Journal of Systems Engineering and Electronics, 2012, 34(4): 782-788. |
| [8] | 于荣欢, 吴玲达, 瞿师. 组网雷达探测能力的并行计算与可视化方法研究[J]. Journal of Systems Engineering and Electronics, 2011, 33(11): 2512-2516. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||