
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (8): 2696-2708.doi: 10.12305/j.issn.1001-506X.2024.08.17
• 系统工程 • 上一篇
钟罡, 周蒋颖, 杜森, 张洪海, 刘皞
收稿日期:2023-06-07
出版日期:2024-07-25
发布日期:2024-08-07
通讯作者:
钟罡
作者简介:钟罡 (1991—), 男, 副教授, 博士, 主要研究方向为交通运输规划与管理、城市空中交通基金资助:Gang ZHONG, Jiangying ZHOU, Sen DU, Honghai ZHANG, Hao LIU
Received:2023-06-07
Online:2024-07-25
Published:2024-08-07
Contact:
Gang ZHONG
摘要:
保障无人机(unmanned aerial vehicle, UAV)飞行安全已经成为推动无人驾驶航空创新应用与规模发展的关键问题。针对UAV在低空结构化航路网络运行过程中由航迹偏离导致的安全隐患, 提出一种异常航迹检测方法(abnormal trajectory detection method, ATDM)。首先, 建立航迹数据预处理和重构模型, 构筑包含位置、速度、航向等多维属性的航迹数据。其次, 以具有多维属性的航迹数据为输入, 采用双向长短时记忆网络算法构建UAV短期航迹预测模型。最后, 基于历史航迹点和预测航迹点间的多维度局部异常因子, 将航迹偏离检测转化为航迹点密度分类问题, 建立UAV航迹偏离检测方法, 实现短时范围内航迹偏离状态的动态监测。结果表明, ATDM在短的预测时间范围内具有较好的精度优势和实时性。
中图分类号:
钟罡, 周蒋颖, 杜森, 张洪海, 刘皞. 基于航迹预测的无人机短时航迹偏离检测方法[J]. 系统工程与电子技术, 2024, 46(8): 2696-2708.
Gang ZHONG, Jiangying ZHOU, Sen DU, Honghai ZHANG, Hao LIU. Short-time trajectory deviation detection method for UAV based on trajectory prediction[J]. Systems Engineering and Electronics, 2024, 46(8): 2696-2708.
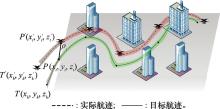
图1
无人机航迹偏离"


图2
技术路线"


图3
无人机航迹重构示意图"

图4
LSTM结构"


图5
Bi-LSTM结构"
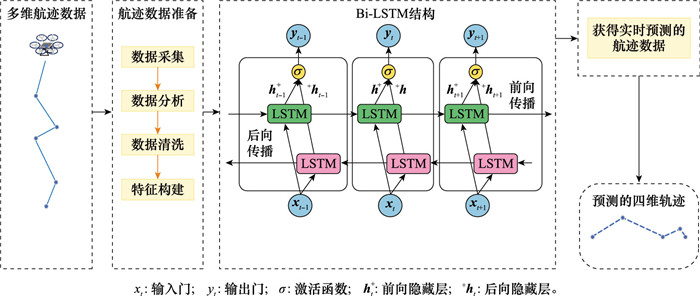

图6
局部异常因子异常检测算法示意图"
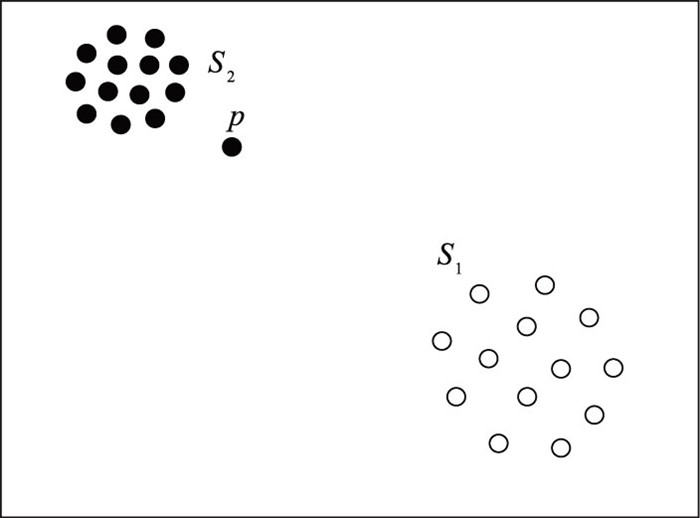
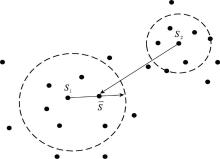
图7
可达距离示意图"


图8
ATDM算法流程图"

表1
神经网络参数"
| 名称 | 参数 |
| 深度学习框架 | Tensorflow2.2.0 |
| 激活函数 | Sigmoid/Tanh |
| 损失函数 | MSE |
| 优化器 | Adam |
| 网络层数 | 256/128/5 |
| 训练轮次 | 50 |

图9
无人机全部航迹"

表2
航迹点特征信息"
| 特征 | 航迹点 |
| 时间 | 5/9/2022 15:39:36 |
| 编号 | 2 |
| 经度/(°) | 118.781 848 31 |
| 纬度/(°) | 31.941 673 23 |
| 高度/m | 27.423 |
| 速度/(m/s) | 0.09 |
| 航向/(°) | 15 |
表3
样本分类表"
| 真实\预测 | 正常航迹 | 异常航迹 |
| 正常航迹 | TP | FN |
| 异常航迹 | FP | TN |

图10
航迹插值实例"


图11
MSE随迭代次数变化"


图12
MSE随预测时间跨度变化"

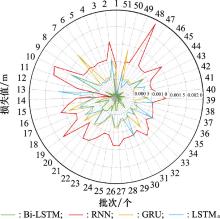
图13
不同方法MSE对比图"


图14
四维航迹预测效果展示图"


图15
ATDM输出值"
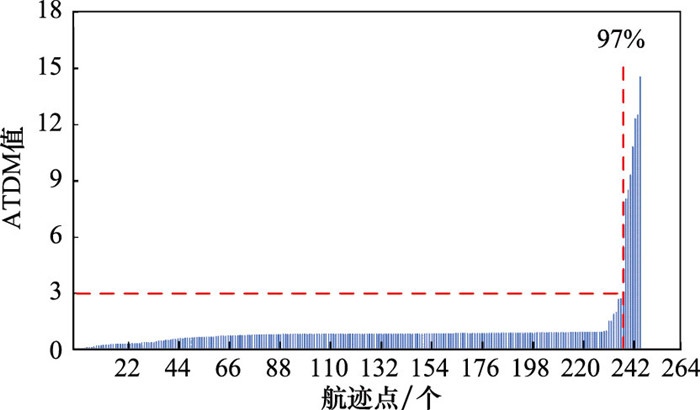
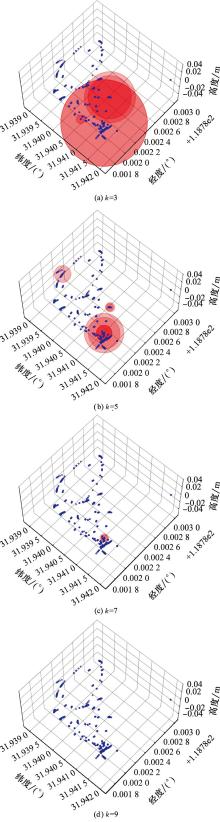
图16
异常航迹点检测结果"

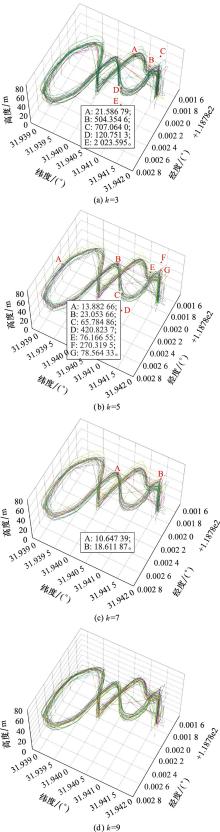
图17
ATDM异常点展示"

表4
不同k值检测精度"
| 参数 | k取值 | |||
| 3 | 5 | 7 | 9 | |
| 精度 | 0.895 | 0.902 | 0.888 | 0.885 |
| 召回率 | 0.991 | 0.992 | 0.996 | 1 |
| F1得分 | 0.941 | 0.945 | 0.939 | 0.938 |
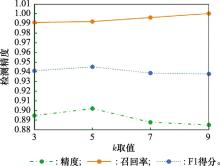
图18
检测效果随k值变化曲线"


图19
检测效果随时间变化曲线"
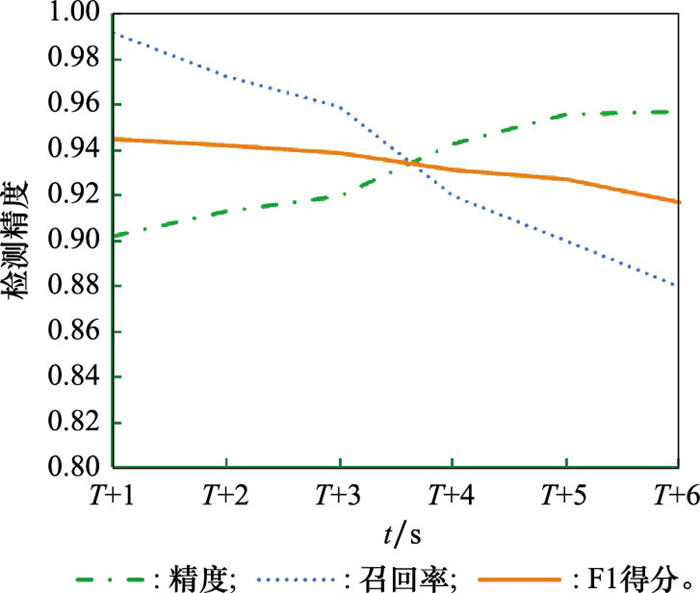
表5
多种模型的对比结果"
| 参数 | 模型 | |||
| LSTM | SVM | iForest | ATDM | |
| 精度 | 0.892 | 0.872 | 0.901 | 0.902 |
| 召回率 | 0.871 | 0.843 | 0.884 | 0.992 |
| F1得分 | 0.881 | 0.857 | 0.892 | 0.945 |
| 是否需要标注 | 是 | 是 | 否 | 否 |

图20
模型结果对比图"

| 1 |
MENOUAR H , GUVENC I , AKKAYA K , et al. UAV-enabled intelligent transportation systems for the smart city: applications and challenges[J]. IEEE Communications Magazine, 2017, 55 (3): 22- 28.
doi: 10.1109/MCOM.2017.1600238CM |
| 2 | CHEN C M , YE Z , HU F , et al. Vehicle trajectory-clustering method based on road-network-sensitive features[J]. Journal of Intelligent & Fuzzy Systems: Applications in Engineering and Technology, 2021, 41 (1): 2357- 2375. |
| 3 | ZHU T L, XIE D F. Analysis of interdriver heterogeneity based on trajectory data with K-means clustering method[C]//Proc. of the International Conference on Sensor Network and Computer Engineering, 2016: 682-689. |
| 4 |
JIN Y X , NIKITAS N , HU Q Y , et al. Maritime anomaly detection within coastal waters based on vessel trajectory clustering and naive Bayes classifier[J]. Journal of Navigation, 2017, 70 (3): 648- 670.
doi: 10.1017/S0373463316000850 |
| 5 | LIU S J , CHEN G , WEI L , et al. A novel compression approach for truck GPS trajectory data[J]. IET Intelligent Transport Systems, 2020, (5): 74- 83. |
| 6 |
QI L , JI Y Y . Ship trajectory data compression algorithms for automatic identification system: comparison and analysis[J]. Journal of Water Resources and Ocean Science, 2020, 9 (2): 42- 47.
doi: 10.11648/j.wros.20200902.11 |
| 7 |
GAO J B , CAI Z , YU W J , et al. Trajectory data compression algorithm based on ship navigation state and acceleration variation[J]. Journal of Marine Science and Engineering, 2023, 11 (1): 216.
doi: 10.3390/jmse11010216 |
| 8 |
ZHONG G , ZHANG H H , ZHOU J Y , et al. Short-term 4D trajectory prediction for UAV based on spatio-temporal trajectory clustering[J]. IEEE Access, 2022, 10, 93362- 93380.
doi: 10.1109/ACCESS.2022.3203428 |
| 9 |
WU X P , YANG H Y , HU C , et al. Long-term 4D trajectory prediction using generative adversarial networks[J]. Transportation Research Part C: Emerging Technologies, 2022, 136, 103554.
doi: 10.1016/j.trc.2022.103554 |
| 10 | LIN L , LI W Z , BI H K . Vehicle trajectory prediction using LSTMs with spatial-temporal attention mechanisms[J]. IEEE Intelligent Transportation Systems Magazine, 2021, 14 (2): 197- 208. |
| 11 |
HUANG M , WASHINGTONY O , MACIAS J J E , et al. Accuracy evaluation of a new generic trajectory prediction model for unmanned aerial vehicles[J]. Aerospace Science and Technology, 2021, 119, 107160.
doi: 10.1016/j.ast.2021.107160 |
| 12 |
ZHANG H H , YAN Y J , LI S , et al. UAV behavior-intention estimation method based on 4-D flight-trajectory prediction[J]. Sustainability, 2021, 13 (22): 12528.
doi: 10.3390/su132212528 |
| 13 | 刘良旭, 乔少杰, 刘宾, 等. 基于R-Tree的高效异常轨迹检测算法[J]. 软件学报, 2009, 20 (9): 2426- 2435. |
| LIU L X , QIAO S J , LIU B , et al. Efficient trajectory outlier detection algorithm based on R-Tree[J]. Journal of Software, 2009, 20 (9): 2426- 2435. | |
| 14 |
王志森, 张召悦, 冯朝辉, 等. 终端区飞行轨迹聚类分析及异常轨迹识别[J]. 科学技术与工程, 2022, 22 (9): 3807- 3814.
doi: 10.3969/j.issn.1671-1815.2022.09.052 |
|
WANG Z S , ZHANG Z Y , FENG Z H , et al. Cluster analysis and abnormal trajectories of flight trajectory in terminal area[J]. Science and Technology and Engineering, 2022, 22 (9): 3807- 3814.
doi: 10.3969/j.issn.1671-1815.2022.09.052 |
|
| 15 |
吴建华, 吴琛, 刘文, 等. 船舶AIS轨迹异常的自动检测与修复算法[J]. 中国航海, 2017, 40 (1): 8-12, 101.
doi: 10.3969/j.issn.1000-4653.2017.01.003 |
|
WU J H , WU C , LIU W , et al. Automatic detection and restoration algorithm for trajectory anomalies of ship AIS[J]. Navigation of China, 2017, 40 (1): 8-12, 101.
doi: 10.3969/j.issn.1000-4653.2017.01.003 |
|
| 16 |
姜佰辰, 关键, 周伟, 等. 海上交通的船舶异常行为挖掘识别分析[J]. 计算机仿真, 2017, 34 (6): 329- 334.
doi: 10.3969/j.issn.1006-9348.2017.06.071 |
|
JIANG B C , GUAN J , ZHOU W , et al. Vessel abnormal behaviors mining recognition analysis on maritime traffic[J]. Computer Simulation, 2017, 34 (6): 329- 334.
doi: 10.3969/j.issn.1006-9348.2017.06.071 |
|
| 17 | 潘新龙, 王海鹏, 何友, 等. 基于多维航迹特征的异常行为检测方法[J]. 航空学报, 2017, 38 (4): 254- 263. |
| PAN X L , WANG H P , HE Y , et al. Anomalous behavior detection method based on multi-dimensional trajectory characteristics[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38 (4): 254- 263. | |
| 18 |
ZHAO K W , XIE X L , ZHANG X J . Maritime anomaly detection based on a support vector machine[J]. Soft Computing, 2022, 26 (21): 11553- 11566.
doi: 10.1007/s00500-022-07409-w |
| 19 | 刘朋. 基于监视数据的机动区航空器异常行为检测[D]. 天津: 中国民航大学, 2018. |
| LIU P. Abnormal behavior detection for aircraft in maneuvering area based on surveillance data[D]. Tianjin: Civil Aviation University of China, 2018. | |
| 20 | LUO P , WANG B H , LI T Y , et al. ADS-B anomaly data detection model based on VAE-SVDD[J]. Computers & Security, 2021, 104, 102213. |
| 21 |
JI Y F , WANG L W , WU W L , et al. A method for LSTM-based trajectory modeling and abnormal trajectory detection[J]. IEEE Access, 2020, 8, 104063- 104073.
doi: 10.1109/ACCESS.2020.2997967 |
| 22 | NING S G , SUN J Z , LIU C , et al. Applications of deep learning in big data analytics for aircraft complex system anomaly detection[J]. Journal of Risk and Reliability, 2021, 235 (5): 923- 940. |
| 23 |
CAO Y P , CAO J W , ZHOU Z G , et al. Aircraft track anomaly detection based on MOD-Bi-LSTM[J]. Electronics, 2021, 10 (9): 1007.
doi: 10.3390/electronics10091007 |
| 24 |
XIAO K , ZHAO J Y , HE Y H , et al. Abnormal behavior detection scheme of UAV using recurrent neural networks[J]. IEEE Access, 2019, 7, 110293- 110305.
doi: 10.1109/ACCESS.2019.2934188 |
| 25 | LEI P R . A framework for anomaly detection in maritime tra-jectory behavior[J]. Knowledge & Information Systems, 2016, 47, 189- 214. |
| 26 | WANG Y K , LIU J X , LIU R W , et al. Data-driven methods for detection of abnormal ship behavior: progress and trends[J]. Ocean Engineering, 2023, 271 (1): 113673. |
| 27 | LIU H D , LIU Y , LI B , et al. Ship abnormal behavior detection method based on optimized GRU network[J]. Journal of Marine Science and Engineering, 2022, 110 (2): 249- 259. |
| 28 | GUO S Q , MOU J M , CHEN L Y , et al. An anomaly detection method for AIS trajectory based on kinematic interpolation[J]. Journal of Marine Science and Engineering, 2021, 2 (6): 609. |
| 29 |
WANG X L , WANG Q . An abnormal traffic detection method using GCN-Bi-LSTM-attention in the internet of vehicles environment[J]. EURASIP Journal on Wireless Communications and Network, 2023, 2023, 70.
doi: 10.1186/s13638-023-02274-z |
| 30 | YU W . Research on feature extraction of vehicle abnormal driving behaviour based on 5G internet of vehicles[J]. International Journal of Vehicle Design, 2021, 86 (1/4): 124- 142. |
| 31 | LI C N , FENG G W , JIA Y R . RETAD: vehicle trajectory anomaly detection based on reconstruction error[J]. International Journal of Data Warehousing and Mining, 2023, 19 (2): 316460. |
| 32 | ZHAO X J , SU J H , CAI J H , et al. Vehicle anomalous trajectory detection algorithm based on road network partition[J]. Applied Intelligence, 2021, 52 (8): 8820- 8838. |
| 33 | HUANG S E , FENG Y , LIU H X . A data-drivenmethod for falsified vehicle trajectory identification by anomaly detection[J]. Transportation Research Part C: Emerging Technologies, 2021, 128 (6): 103196. |
| 34 |
CORRADO S J , PURANIKN T G , FISCHER O P , et al. A clustering-based quantitative analysis of the interdependent relationship between spatial and energy anomalies in ADS-B trajectory data[J]. Transportation Research Part C: Emerging Technologies, 2021, 131, 103331.
doi: 10.1016/j.trc.2021.103331 |
| [1] | 赵晓琛, 赵东涛, 袁航, 王欢, 张群. 低脉冲重复频率条件下无人机微动参数提取[J]. 系统工程与电子技术, 2024, 46(5): 1503-1513. |
| [2] | 陶灿灿, 周锐. 面向空地中继网络优化的无人机运动控制方法[J]. 系统工程与电子技术, 2024, 46(5): 1712-1723. |
| [3] | 隋东, 杨振宇, 丁松滨, 周婷婷. 基于EMSDBO算法的无人机三维航迹规划[J]. 系统工程与电子技术, 2024, 46(5): 1756-1766. |
| [4] | 余婧, 吴晓军, 蒋安林, 雍恩米. 基于多精度规划窗口的无人机航迹规划方法研究[J]. 系统工程与电子技术, 2024, 46(5): 1767-1776. |
| [5] | 毕文豪, 张梦琦, 高飞, 杨咪, 张安. 无人机集群任务分配技术研究综述[J]. 系统工程与电子技术, 2024, 46(3): 922-934. |
| [6] | 刘涛, 王沙沙, 张驰, 白光晗, 陶俊勇. 考虑韧性的无人机集群自组织区域覆盖方法[J]. 系统工程与电子技术, 2024, 46(3): 942-952. |
| [7] | 高程, 都延丽, 步雨浓, 刘燕斌, 王宇飞. 面向复杂多任务的异构无人机集群分组调配[J]. 系统工程与电子技术, 2024, 46(3): 972-981. |
| [8] | 郝文康, 陈琪锋. 无人机编队模糊约束分布式模型预测节能控制[J]. 系统工程与电子技术, 2024, 46(3): 1021-1030. |
| [9] | 桂洋, 郑柏超, 高鹏. 基于NESO-LFDC的四旋翼无人机滑模姿态控制[J]. 系统工程与电子技术, 2024, 46(3): 1075-1083. |
| [10] | 裴立冠, 周唯, 刘经东. 基于布谷鸟搜索算法的机动化箔条幕布放方法研究[J]. 系统工程与电子技术, 2024, 46(3): 814-823. |
| [11] | 刘世豪, 黄仰超, 胡航, 司江勃, 韩蕙竹, 安琪. 无人机群辅助边缘计算系统的任务卸载和资源分配联合优化[J]. 系统工程与电子技术, 2024, 46(2): 751-760. |
| [12] | 杨勇, 王雪松. 基于杂波拖尾分布的雷达无人机检测性能分析[J]. 系统工程与电子技术, 2024, 46(1): 113-120. |
| [13] | 杨振亚, 张智, 尚晓兵, 曹择骏, 孙喆轩. 基于改进多输出支持向量的船舶航迹预测[J]. 系统工程与电子技术, 2024, 46(1): 173-181. |
| [14] | 薛锡瑞, 黄树彩, 韦道知, 吴建峰. 基于EMD-DESN的无人机集群航迹目的地预测[J]. 系统工程与电子技术, 2024, 46(1): 290-299. |
| [15] | 王中宝, 尹奎英. 基于联合域滤波的无人机载SAR图像块效应抑制方法[J]. 系统工程与电子技术, 2023, 45(9): 2768-2776. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||