
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (7): 2424-2436.doi: 10.12305/j.issn.1001-506X.2024.07.24
• 制导、导航与控制 • 上一篇
熊子淳, 刘永善
收稿日期:2023-06-09
出版日期:2024-06-28
发布日期:2024-07-02
通讯作者:
刘永善
作者简介:熊子淳(1999—), 男, 硕士研究生, 主要研究方向为运动规划、飞行器制导控制与仿真Zichun XIONG, Yongshan LIU
Received:2023-06-09
Online:2024-06-28
Published:2024-07-02
Contact:
Yongshan LIU
摘要:
针对长航程飞行器打击低速舰船目标的问题, 提出一种基于滚动序列凸优化算法的中段航迹快速规划算法。使用滚动规划框架将航迹更新问题转化为初始与终端位置更新后的单次航迹规划子问题, 构造多约束凸优化问题并使用序列凸优化算法求解。提出滚动规划周期收缩策略, 减少航迹更新次数。设计了一种改进参考航迹生成算法并使用了信赖域自适应收缩策略, 在保证规划效果的同时有效提高计算速度。仿真结果表明, 该算法规划效果优良, 可满足在线规划的要求, 且与一般的滚动序列凸优化航迹规划算法相比速度更快。
中图分类号:
熊子淳, 刘永善. 针对低速目标的飞行器中段航迹快速规划[J]. 系统工程与电子技术, 2024, 46(7): 2424-2436.
Zichun XIONG, Yongshan LIU. Flight vehicle midcourse trajectory fast planning for low-speed target[J]. Systems Engineering and Electronics, 2024, 46(7): 2424-2436.

图1
飞行器航迹滚动规划框架与跟踪控制系统框图"


图2
飞行时长调整算法原理"

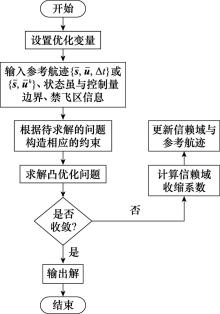
图3
SCP算法流程图"


图4
IRTG-MPC-SCP航迹规划算法的流程图"

表1
条件1禁飞区设置"
| 禁飞区编号 | 中心位置 | 半径 |
| 1 | (100 000, 90 000) | 60 000 |
| 2 | (300 000, 200 000) | 60 000 |
| 3 | (150 000, 200 000) | 50 000 |
表2
条件2禁飞区设置"
| 禁飞区编号 | 中心位置 | 半径 |
| 1 | (13 000, 8 000) | 5 000 |
| 2 | (29 000, 17 000) | 5 000 |

图5
条件1下飞行器的航迹"


图6
条件2下飞行器的航迹"


图7
条件1下的航向角、速度、控制量"

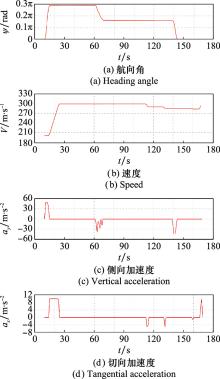
图8
条件2下的航向角、速度、控制量"


图9
滚动规划求得的飞行时长"


图10
SCP迭代次数与耗时"


图11
滚动规划起始时刻"


图12
不同算法求得的航迹"
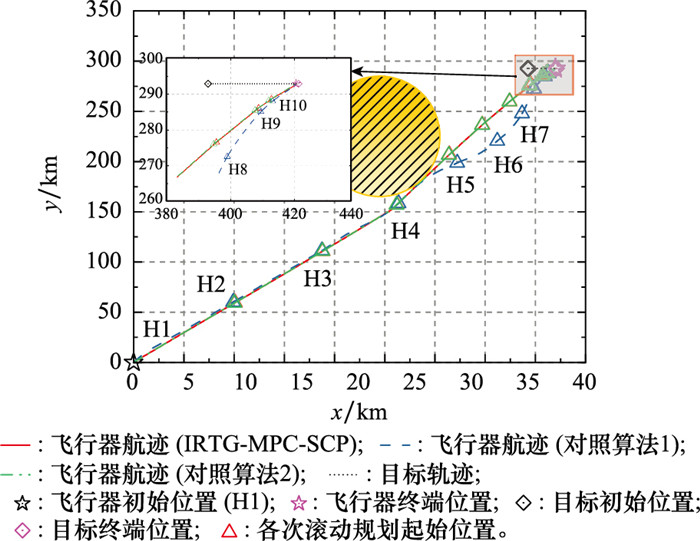
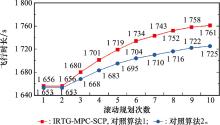
图13
各算法求得的飞行时长"


图14
不同算法SCP迭代次数与耗时"

| 1 |
DRAKE D , KOZIOL S , CHABOT E . Mobile robot path planning with a moving goal[J]. IEEE Access, 2018, 6, 12800- 12814.
doi: 10.1109/ACCESS.2018.2797070 |
| 2 |
PHUNG M D , HA Q P . Motion-encoded particle swarm optimization for moving target search using UAVs[J]. Applied Soft Computing, 2020, 97, 106705.
doi: 10.1016/j.asoc.2020.106705 |
| 3 | TRIHARMINTO H H, ADJI T B, SETIAWAN N A. Dynamic UAV path planning for moving target intercept in 3D[C]//Proc. of the IEEE 2nd International Conference on Instrumentation Control and Automation, 2011: 157-161. |
| 4 |
MEYER Y , ISAIAH P , SHIMA T . On Dubins paths to intercept a moving target[J]. Automatica, 2015, 53, 256- 263.
doi: 10.1016/j.automatica.2014.12.039 |
| 5 | BEUL M, BEHNKE S. Fast full state trajectory generation for multirotors[C]//Proc. of the IEEE International Conference on Unmanned Aircraft Systems, 2017: 408-416. |
| 6 |
ZHENG Y , CHEN Z , SHAO X M , et al. Time-optimal guidance for intercepting moving targets with impact-angle constraints[J]. Chinese Journal of Aeronautics, 2022, 35 (7): 157- 167.
doi: 10.1016/j.cja.2021.08.002 |
| 7 | LIU Y, WANG Y D, DONG L. USV target interception control with reinforcement learning and motion prediction method[C]//Proc. of the IEEE 37th Youth Academic Annual Conference of Chinese Association of Automation, 2022: 1050-1054. |
| 8 | 王祝, 刘莉, 龙腾, 等. 基于罚函数序列凸规划的多无人机轨迹规划[J]. 航空学报, 2016, 37 (10): 3149- 3158. |
| WANG Z , LIU L , LONG T , et al. Trajectory planning for multi- UAVs using penalty sequential convex programming[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37 (10): 3149- 3158. | |
| 9 | MENG B B. UAV path planning based on bidirectional sparse A* search algorithm[C]//Proc. of the IEEE International Conference on Intelligent Computation Technology and Automation, 2010: 1106-1109. |
| 10 |
ZHEN Z Y , CHEN Y , WEN L D , et al. An intelligent coopera- tive mission planning scheme of UAV swarm in uncertain dynamic environment[J]. Aerospace Science and Technology, 2020, 100, 105826.
doi: 10.1016/j.ast.2020.105826 |
| 11 |
QI Y Y , LIU J C , YU J Z . Dynamic modeling and hybrid fireworks algorithm-based path planning of an amphibious robot[J]. Gui-dance, Navigation and Control, 2022, 2 (1): 2250002.
doi: 10.1142/S2737480722500029 |
| 12 |
OYANA S N O , LI J , USMAN M . Three-layer multi-UAVs path planning based on ROBL-MFO[J]. Guidance, Navigation and Control, 2022, 2 (3): 2250017.
doi: 10.1142/S2737480722500170 |
| 13 |
SHANMUGAVEL M , TSOURDOS A , WHITE B , et al. Cooperative path planning of multiple UAVs using Dubins paths with clothoid arcs[J]. Control Engineering Practice, 2010, 18 (9): 1084- 1092.
doi: 10.1016/j.conengprac.2009.02.010 |
| 14 |
YANG S B , CUI T , HAO X Y , et al. Trajectory optimization for a ramjet-powered vehicle in ascent phase via the Gauss pseudospectral method[J]. Aerospace Science and Technology, 2017, 67, 88- 95.
doi: 10.1016/j.ast.2017.04.001 |
| 15 | YAN C , XIANG X J , WANG C . Towards real-time path planning through deep reinforcement learning for a UAV in dynamic environments[J]. Journal of Intelligent & Robotic Systems, 2020, 98 (12): 297- 309. |
| 16 |
ZHANG Y T , ZHANG Y M , YU Z Q . Path following control for UAV using deep reinforcement learning approach[J]. Gui-dance, Navigation and Control, 2021, 1 (1): 2150005.
doi: 10.1142/S2737480721500059 |
| 17 | 李樾, 韩维, 陈清阳, 等. 凸优化算法在有人/无人机协同系统航迹规划中的应用[J]. 宇航学报, 2020, 41 (3): 276- 286. |
| LI Y , HAN W , CHEN Q Y , et al. Application of convex optimization algorithm in trajectory planning of manned/unmanned cooperative system[J]. Journal of Astronautics, 2020, 41 (3): 276- 286. | |
| 18 |
LIU X F , SHEN Z J , LU P . Entry trajectory optimization by second-order cone programming[J]. Journal of Guidance, Control, and Dynamics, 2016, 39 (2): 227- 241.
doi: 10.2514/1.G001210 |
| 19 | LIU X F . Convergence-guaranteed trajectory planning for a class of nonlinear systems with nonconvex state constraints[J]. IEEE Trans.on Aerospace and Electronic Systems, 2021, 58 (3): 2243- 2256. |
| 20 |
ZHANG G X , LIU X F . UAV collision avoidance using mixed-integer second-order cone programming[J]. Journal of Gui-dance, Control, and Dynamics, 2022, 45 (9): 1732- 1738.
doi: 10.2514/1.G006353 |
| 21 | DINH Q T, DIEHL M. Local convergence of sequential convex programming for nonconvex optimization[C]//Proc. of the Recent Advances in Optimization and its Applications in Engineering: the 14th Belgian-French-German Conference on Optimization, 2010: 93-102. |
| 22 | MESSERER F, DIEHL M. Determining the exact local convergence rate of sequential convex programming[C]//Proc. of the IEEE European Control Conference, 2020: 1280-1285. |
| 23 |
BONALLI R , LEW T , PAVONE M . Analysis of theoretical and numerical properties of sequential convex programming for continuous-time optimal control[J]. IEEE Trans.on Automatic Control, 2023, 68 (8): 4570- 4585.
doi: 10.1109/TAC.2022.3207865 |
| 24 | AUGUGLIARO F, SCHOELLIG A P, D'ANDREA R. Gene- ration of collision-free trajectories for a quadrocopter fleet: a sequential convex programming approach[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2012: 1917-1922. |
| 25 |
JIANG H , AN Z , YU Y N , et al. Cooperative guidance with multiple constraints using convex optimization[J]. Aerospace Science and Technology, 2018, 79, 426- 440.
doi: 10.1016/j.ast.2018.06.001 |
| 26 |
MORGAN D , CHUNG S J , HADAEGH F Y . Model predictive control of swarms of spacecraft using sequential convex programming[J]. Journal of Guidance, Control, and Dynamics, 2014, 37 (6): 1725- 1740.
doi: 10.2514/1.G000218 |
| 27 |
MORGAN D , SUBRAMANIAN G P , CHUNG S J , et al. Swarm assignment and trajectory optimization using variable-swarm, distributed auction assignment and sequential convex programming[J]. The International Journal of Robotics Research, 2016, 35 (10): 1261- 1285.
doi: 10.1177/0278364916632065 |
| 28 | 徐广通, 邹汝平, 王祝, 等. 基于滚动规划框架的多无人机协同轨迹快速生成方法[J]. 无人系统技术, 2021, 4 (2): 33- 39. |
| XU G T , ZOU R P , WANG Z , et al. Multiple unmanned aerial vehicle rapid cooperative trajectory generation method using receding planning framework[J]. Unmanned Systems Techno-logy, 2021, 4 (2): 33- 39. | |
| 29 | 徐广通, 孟子阳, 龙腾, 等. 通信距离受限下无人机集群轨迹分布式滚动规划[J]. 中国科学: 信息科学, 2022, 52 (8): 1527- 1541. |
| XU G T , MENG Z Y , LONG T , et al. Trajectory distributed receding planning for UAV swarms subject to limited communication distance[J]. Scientia Sinica Informations, 2022, 52 (8): 1527- 1541. | |
| 30 |
SHI Y , ZHANG L H , DONG S Q . Path planning of anti-ship missile based on Voronoi diagram and binary tree algorithm[J]. Defence Science Journal, 2019, 69 (4): 369- 377.
doi: 10.14429/dsj.69.14062 |
| 31 |
WANG Z , LIU L , LONG T . Minimum-time trajectory planning for multi-unmanned-aerial-vehicle cooperation using sequential convex programming[J]. Journal of Guidance, Control, and Dynamics, 2017, 40 (11): 2976- 2982.
doi: 10.2514/1.G002349 |
| 32 |
XU G T , LONG T , WANG Z , et al. Trust-region filtered sequential convex programming for multi-UAV trajectory planning and collision avoidance[J]. ISA Transactions, 2022, 128, 664- 676.
doi: 10.1016/j.isatra.2021.11.043 |
| 33 | 邓云山, 夏元清, 孙中奇. 基于松弛序列凸优化的轮式机器人协同轨迹规划[J]. 无人系统技术, 2021, 4 (1): 24- 32. |
| DENG Y S , XIA Y Q , SUN Z Q . Coordination trajectory planning of wheeled robot using relaxation sequential convex programming[J]. Unmanned System Technology, 2021, 4 (1): 24- 32. | |
| 34 | 刘哲, 陆浩然, 郑伟, 等. 多滑翔飞行器时间协同轨迹快速规划[J]. 航空学报, 2021, 42 (11): 317- 331. |
| LIU Z , LU H R , ZHENG W , et al. Rapid time-coordination trajectory planning method for multi-glide vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42 (11): 317- 331. | |
| 35 | 邓雁鹏, 穆荣军, 彭娜, 等. 月面着陆动力下降段最优轨迹序列凸优化方法[J]. 宇航学报, 2022, 43 (8): 1029- 1039. |
| DENG Y P , MU R J , PENG N , et al. Sequential convex optimization method for lunar landing during power decent phase[J]. Journal of Astronautics, 2022, 43 (8): 1029- 1039. |
| [1] | 余婧, 吴晓军, 蒋安林, 雍恩米. 基于多精度规划窗口的无人机航迹规划方法研究[J]. 系统工程与电子技术, 2024, 46(5): 1767-1776. |
| [2] | 赵昱宇, 索超, 王雨潇. 基于微分平坦的高超声速飞行器跟踪控制方法[J]. 系统工程与电子技术, 2024, 46(3): 1084-1092. |
| [3] | 刘正洋, 周丽, 张瑞. 随机参数摄动下的高超声速飞行器姿态控制[J]. 系统工程与电子技术, 2024, 46(2): 703-714. |
| [4] | 卫继承, 张娟, 杨文雅, 马岚岭, 张航. 基于DoDAF的低慢小飞行器综合处置体系架构设计[J]. 系统工程与电子技术, 2024, 46(1): 162-172. |
| [5] | 左仁伟, 李颖晖, 吕茂隆, 聂鸿雁. 动态自触发通信下多智能体输出反馈包容控制[J]. 系统工程与电子技术, 2024, 46(1): 345-356. |
| [6] | 刘玉杰, 李樾, 韩维, 崔凯凯. 基于改进凸优化算法的多机编队突防航迹规划[J]. 系统工程与电子技术, 2023, 45(9): 2819-2830. |
| [7] | 郑多, 韩煜, 鲁天宇, 初治辰. 考虑避碰与任务分配的多飞行器协同制导技术[J]. 系统工程与电子技术, 2023, 45(9): 2873-2883. |
| [8] | 陈子豪, 李娟, 刘畅, 李杰, 刘笑宇. 时间约束下对地面目标协同攻击任务规划方法[J]. 系统工程与电子技术, 2023, 45(8): 2353-2360. |
| [9] | 吴立尧, 苏析超, 王垒, 潘子双. 有人/无人机编队队形集结控制研究[J]. 系统工程与电子技术, 2023, 45(7): 2192-2202. |
| [10] | 王庆禄, 吴冯国, 郑成辰, 李辉. 基于优化人工势场法的无人机航迹规划[J]. 系统工程与电子技术, 2023, 45(5): 1461-1468. |
| [11] | 董泽洪, 李颖晖, 吕茂隆, 李哲, 裴彬彬. 考虑输入受限的高超声速飞行器非奇异固定时间自适应切换控制[J]. 系统工程与电子技术, 2023, 45(5): 1476-1488. |
| [12] | 任文娟, 杨战鹏, 许光銮, 付琨. 海上动目标身份置信度融合计算模型[J]. 系统工程与电子技术, 2023, 45(4): 1082-1089. |
| [13] | 崔正达, 魏明英, 李运迁. 考虑阻力系数时变的下压段半解析时间预测方法[J]. 系统工程与电子技术, 2023, 45(2): 530-537. |
| [14] | 徐选华, 朱昱承. 数据驱动的大群体应急决策公众专家动态协同方法[J]. 系统工程与电子技术, 2023, 45(12): 3875-3886. |
| [15] | 宋超, 李波, 马云红, 黄晶益. 基于优化A*和MPC融合算法的三维无人机航迹规划[J]. 系统工程与电子技术, 2023, 45(12): 3995-4004. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||