
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (5): 1767-1776.doi: 10.12305/j.issn.1001-506X.2024.05.29
• 制导、导航与控制 • 上一篇
余婧, 吴晓军, 蒋安林, 雍恩米
收稿日期:2023-03-15
出版日期:2024-04-30
发布日期:2024-04-30
通讯作者:
雍恩米
作者简介:余婧 (1986—), 女, 副研究员, 博士, 主要研究方向为飞行器设计、飞行器任务规划Jing YU, Xiaojun WU, Anlin JIANG, Enmi YONG
Received:2023-03-15
Online:2024-04-30
Published:2024-04-30
Contact:
Enmi YONG
摘要:
航迹规划是无人机(unmanned aerial vehicle, UAV)任务规划系统的核心部分之一, 其主要任务是结合战场环境等约束条件, 寻找一条安全系数高、满足任务需求且飞行代价小的UAV最优飞行航迹。基于现有蚁群优化(ant colony optimization, ACO)算法, 在其并行能力基础上提出一种多精度规划窗口方法。该方法在初始航迹基础上, 进一步针对局部飞行环境特点, 自动配置局部规划窗口、规划精度和规划参数, 并行地开展多精度窗口航迹调整, 可在较短时间内优化出一条适应战场环境的飞行航迹。仿真分析表明, 不同战场环境下所需的算法参数配置、规划精度各有不同, 通过多精度规划窗口的优化与调整, 最终飞行航迹可适应不同战场环境, 且具备较好的规划效率与精度。
中图分类号:
余婧, 吴晓军, 蒋安林, 雍恩米. 基于多精度规划窗口的无人机航迹规划方法研究[J]. 系统工程与电子技术, 2024, 46(5): 1767-1776.
Jing YU, Xiaojun WU, Anlin JIANG, Enmi YONG. Research on UAV path planning method based on the multi-precision planning windows[J]. Systems Engineering and Electronics, 2024, 46(5): 1767-1776.

图1
无人机飞行航迹示意图"
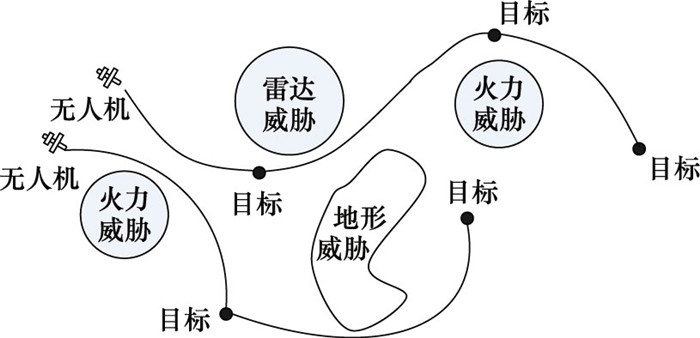

图2
绕过威胁区域飞行示意图"


图3
网格划分示例"


图4
无人机航迹图"


图5
候选节点选择"


图6
多精度规划窗口实现思路"


图7
多精度规划窗口实现示意图"
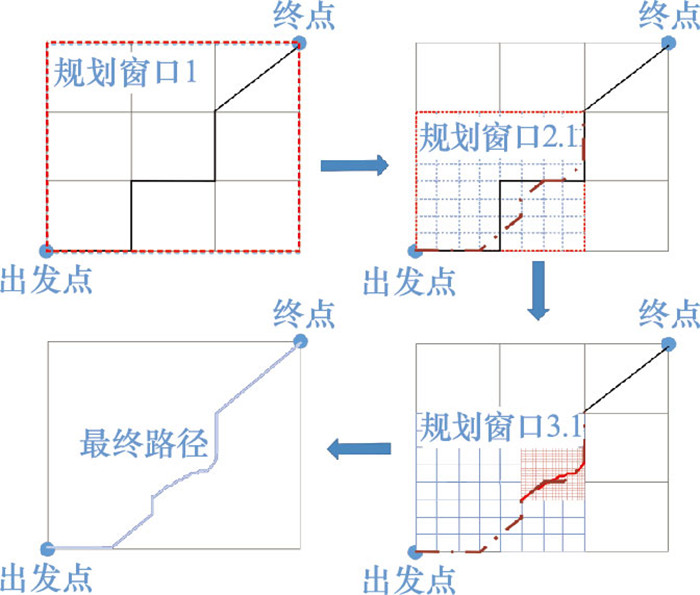
表1
威胁分布"
| 坐标参数 | 雷达 | 火力 | 地形 | 气象 | 禁飞区 | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |||||
| X轴坐标/km | 520 | 460 | 200 | 420 | 340 | 120 | 80 | 240 | 320 | 420 | ||||
| Y轴坐标/km | 260 | 500 | 540 | 100 | 340 | 80 | 360 | 400 | 200 | 340 | ||||
| 威胁半径/km | 120 | 120 | 120 | 100 | 100 | 10 | 10 | 10 | 10 | 10 | ||||
表2
ACO算法参数设置"
| 参数 | 数值 |
| 种群数量 | 100 |
| α | 1 |
| β | 7 |
| ρ | 0.3 |
| Q | 10 |
| 最大迭代次数 | 400 |
表3
规划窗口A优化结果(网格精度为20 km×20 km)"
| 参数 | 算例编码 | ||
| A-1 | A-2 | A-3 | |
| w1 | 0.8 | 0.5 | 0.2 |
| w2 | 0.2 | 0.5 | 0.8 |
| 航程/km | 539.41 | 539.41 | 539.41 |
| 归一化航程 | 0.899 | 0.899 | 0.899 |
| 威胁代价 | 0 | 0 | 0 |
| 归一化威胁 | 0 | 0 | 0 |
| 总代价 | 0.719 2 | 0.449 5 | 0.179 8 |
表4
规划窗口B优化结果(网格精度为20 km×20 km)"
| 参数 | 算例编码 | ||
| B-1 | B-2 | B-3 | |
| w1 | 0.8 | 0.5 | 0.2 |
| w2 | 0.2 | 0.5 | 0.8 |
| 航程/km | 366.27 | 382.842 7 | 411.13 |
| 归一化航程 | 0.610 5 | 0.638 1 | 0.685 2 |
| 威胁代价 | 4.030 9 | 3.679 9 | 3.465 9 |
| 归一化威胁 | 0.806 2 | 0.736 0 | 0.693 2 |
| 总代价 | 0.649 6 | 0.687 0 | 0.691 6 |

图8
算例A-1优化结果"


图9
算例A-2优化结果"


图10
算例A-3优化结果"

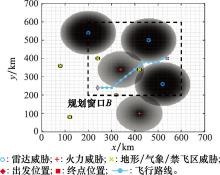
图11
算例B-1优化结果"

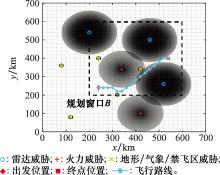
图12
算例B-2优化结果"


图13
算例B-3优化结果"


图14
优化迭代收敛对比图"

表5
不同精度下规划窗口A优化结果"
| 参数 | 算例编码 | ||
| A-4 | A-5(即A-2) | A-6 | |
| 精度/km | 40×40 | 20×20 | 10×10 |
| 规划时间/s | 21.70 | 27.46 | 107.71 |
| 航程/km | 555.98 | 539.41 | 563.553 4 |
| 归一化航程 | 0.926 6 | 0.899 0 | 0.939 3 |
| 威胁代价 | 0.428 0 | 0 | 0.367 9 |
| 归一化威胁 | 0.042 8 | 0 | 0.036 8 |
| 总代价 | 0.484 7 | 0.449 5 | 0.488 0 |
表6
不同精度下规划窗口B优化结果"
| 参数 | 算例编码 | ||
| B-4 | B-5(即B-2) | B-6 | |
| 精度/km | 40×40 | 20×20 | 10×10 |
| 规划时间/s | 10.78 | 29.35 | 131.76 |
| 航程/km | 346.274 2 | 382.842 7 | 440.416 3 |
| 归一化航程 | 0.577 1 | 0.638 1 | 0.734 0 |
| 威胁代价 | 1.977 8 | 3.679 9 | 5.520 7 |
| 归一化威胁 | 0.791 1 | 0.736 0 | 0.552 1 |
| 总代价 | 0.684 1 | 0.687 0 | 0.643 0 |

图15
算例A-4优化结果"
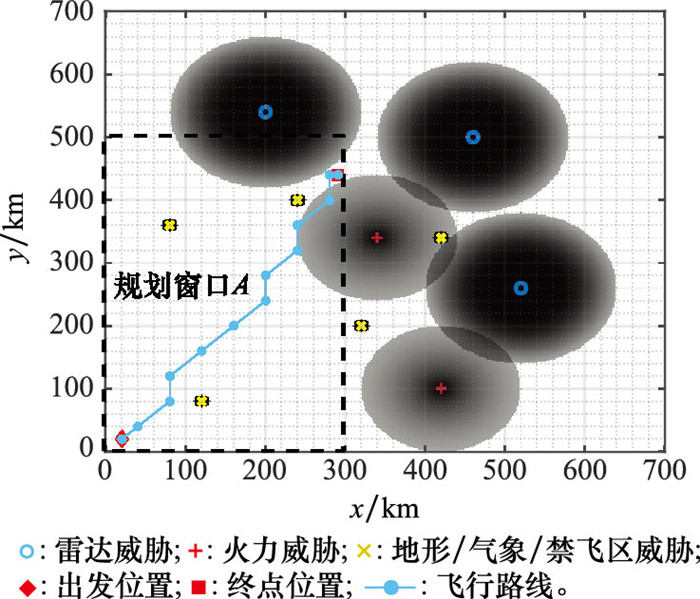

图16
算例A-6优化结果"

图17
算例B-4优化结果"


图18
算例B-6优化结果"


图19
多精度窗口下的航迹优化结果"


图20
多精度窗口下航迹优化结果局部放大图"

| 1 | 霍霄华. 多UCAV动态协同任务规划建模与滚动优化方法研究[D]. 长沙: 国防科技大学, 2007. |
| HUO X H. Research on modeling and rolling optimization methods for multi-UCAV dynamic cooperative mission planning[D]. Changsha: National University of Defense Technology, 2007. | |
| 2 |
路晶, 史宇, 张书畅, 等. 无人机航迹规划算法综述[J]. 航空计算技术, 2022, 52 (4): 131- 134.
doi: 10.3969/j.issn.1671-654X.2022.04.030 |
|
LU J , SHI Y , ZHANG S C , et al. A review of UAV trajectory planning algorithms[J]. Aeronautical Computing Technique, 2022, 52 (4): 131- 134.
doi: 10.3969/j.issn.1671-654X.2022.04.030 |
|
| 3 | 沈林成, 陈璟, 王楠. 飞行器任务规划技术综述[J]. 航空学报, 2014, 35 (3): 593- 606. |
| SHEN L C , CHEN J , WANG N . Overview of air vehicle mission planning techniques[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35 (3): 539- 606. | |
| 4 | 陈守凤. 基于改进人工势场法的多无人机协同航迹规划算法研究[D]. 哈尔滨: 哈尔滨工业大学, 2017. |
| CHEN S F. An improved artificial potential field based path planning algorithm for cooperative collision of multiple unmanned aerial vehicles[D]. Harbin: Harbin Institute of Technology, 2017. | |
| 5 | 张帅, 李学仁, 张鹏, 等. 基于改进A* 算法的无人机航迹规划[J]. 飞行力学, 2016, 34 (3): 39- 43. |
| ZHANG S , LI X R , ZHANG P , et al. UAV path planning based on improved A* algorithm[J]. Flight Dynamics, 2016, 34 (3): 39- 43. | |
| 6 |
VINCENT R , MOHAMMED T , GILLES L . Comparison of parallel genetic algorithm and particle swarm optimization for realtime UAV path planning[J]. IEEE Trans.on Industrial Informatics, 2013, 9 (1): 132- 141.
doi: 10.1109/TII.2012.2198665 |
| 7 | 范林玉. 航迹规划遗传模拟退火算法研究[D]. 重庆: 重庆大学, 2010. |
| FANG L Y. Flight path plan research based on genetic and simulated annealing algorithm[D]. Chongqing: Chongqing University, 2010. | |
| 8 | 陆天和, 刘莉, 贺云涛, 等. 多无人机航迹规划算法及关键技术[J]. 战术导弹技术, 2020, (1): 85- 90. |
| LU T H , LIU L , HE Y T , et al. Multi-UAV path planning algorithm and key technology[J]. Tactical Missile Technology, 2020, (1): 85- 90. | |
| 9 | HOANG V T, PHUNG M D, DINH T H, et al. Angle-encoded swarm optimization for UAV formation path planning[C]//Proc. of the IEEE International Conference on Intelligent Robots and Systems, 2018: 5239-5244. |
| 10 |
SHAO Z , YAN F , ZHOU Z , et al. Path planning for multi-UAV formation rendezvous based on distributed cooperative particle swarm optimization[J]. Applied Sciences, 2019, 9, 2621.
doi: 10.3390/app9132621 |
| 11 | GAMBARDELLA L M, DORIGO M. ANT-Q: a reinforcement learning approach to the traveling salesman problem[C]//Proc. of the 12th International Conference on Machine Learning, 1995: 252-260. |
| 12 |
段海滨, 王道波. 蚁群算法的全局收敛性研究及改进[J]. 系统工程与电子技术, 2004, 26 (10): 1506- 1509.
doi: 10.3321/j.issn:1001-506X.2004.10.049 |
|
DUAN H B , WANG D B . Research and improvement on the global convergence of ant colony algorithm[J]. Systems Engineering and Electronics, 2004, 26 (10): 1506- 1509.
doi: 10.3321/j.issn:1001-506X.2004.10.049 |
|
| 13 | 肖绍. 基于改进蚁群算法的无人机航迹规划研究[D]. 南昌: 南昌航空大学, 2016. |
| XIAO S. The research for route planning of UAV based on improved ant colony algorithm[D]. Nanchang: Nanchang Hangkong University, 2016. | |
| 14 | 陈冬. 基于粒子群优化算法的无人机航迹规划[D]. 西安: 西北工业大学, 2007. |
| CHEN D. UAV path planning based on particle swarm optimization[D]. Xi'an: Northwest Polytechnical University, 2007. | |
| 15 | 张延松. 基于遗传算法的无人机航迹规划研究[D]. 长沙: 中南大学, 2010. |
| ZHANG Y S. UAV path planning based on the genetic algorithm[D]. Changsha: Central South University, 2010. | |
| 16 | 胡中华. 基于智能优化算法的无人机航迹规划若干关键技术研究[D]. 南京: 南京航空航天大学, 2011. |
| HU Z H. Research on some key techniques of UAV path planning based on intelligent optimization algorithm[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2021. | |
| 17 |
陈侠, 毛海亮, 刘奎武. 基于改进自适应蚁群算法的无人机航迹规划研究[J]. 电光与控制, 2022, 29 (9): 6- 10.
doi: 10.3969/j.issn.1671-637X.2022.09.002 |
|
CHEN X , MAO H L , LIU K W . Path planning of UAV based on improved adaptive ant colony algorithm[J]. Electronics Optics & Control, 2022, 29 (9): 6- 10.
doi: 10.3969/j.issn.1671-637X.2022.09.002 |
|
| 18 | 郑弈, 谢亚琴. 基于Dijkstra算法改进的飞行器航迹快速规划算法[J]. 电子测量技术, 2022, 45 (12): 73- 79. |
| ZHENG Y , XIE Y Q . Improved fast aircraft path planning algorithm based on Dijkstra algorithm[J]. Electronic Measurement Technology, 2022, 45 (12): 73- 79. | |
| 19 | 李昱, 李红烨. 针对特殊威胁的改进人工势场法航迹规划[J]. 探测与控制学报, 2022, 44 (4): 111- 117. |
| LI Y , LI H Y . An improbed APF route planning method for special threats[J]. Journal of Dectection & Control, 2022, 44 (4): 111- 117. | |
| 20 |
韩尧, 李少华. 基于改进人工势场法的无人机航迹规划[J]. 系统工程与电子技术, 2021, 43 (11): 3305- 3311.
doi: 10.12305/j.issn.1001-506X.2021.11.31 |
|
HAN Y , LI S H . UAV path planning based on improved artificial potential field[J]. Systems Engineering and Electronics, 2021, 43 (11): 3305- 3311.
doi: 10.12305/j.issn.1001-506X.2021.11.31 |
|
| 21 | 蔡星娟, 胡钊鸣, 张志霞, 等. 基于高维多目标优化的多无人机协同航迹规划[J]. 中国科学: 信息科学, 2021, 51 (6): 985- 996. |
| CAI X J , HU Z M , ZHANG Z X , et al. Multi-UAV coordinated path planning based on many-objective optimization[J]. SCIENTIA SINICA Information, 2021, 51 (6): 985- 996. | |
| 22 | 余婧, 雍恩米, 陈汉洋, 等. 面向多无人机协同对地攻击的双层任务规划方法[J]. 系统工程与电子技术, 2022, 44 (9): 2849- 2857. |
| YU J , YONG E M , CHEN H Y , et al. Bi-level mission planning method for multi-cooperative UAV air-to-ground attack[J]. Systems Engineering and Electronics, 2022, 44 (9): 2849- 2857. |
| [1] | 赵晓琛, 赵东涛, 袁航, 王欢, 张群. 低脉冲重复频率条件下无人机微动参数提取[J]. 系统工程与电子技术, 2024, 46(5): 1503-1513. |
| [2] | 陶灿灿, 周锐. 面向空地中继网络优化的无人机运动控制方法[J]. 系统工程与电子技术, 2024, 46(5): 1712-1723. |
| [3] | 隋东, 杨振宇, 丁松滨, 周婷婷. 基于EMSDBO算法的无人机三维航迹规划[J]. 系统工程与电子技术, 2024, 46(5): 1756-1766. |
| [4] | 刘哲, 马俊飞, 陈佳峰, 马嵩华. 基于改进灰狼算法的舰载机弹药保障调度优化[J]. 系统工程与电子技术, 2024, 46(4): 1264-1272. |
| [5] | 毕文豪, 张梦琦, 高飞, 杨咪, 张安. 无人机集群任务分配技术研究综述[J]. 系统工程与电子技术, 2024, 46(3): 922-934. |
| [6] | 刘涛, 王沙沙, 张驰, 白光晗, 陶俊勇. 考虑韧性的无人机集群自组织区域覆盖方法[J]. 系统工程与电子技术, 2024, 46(3): 942-952. |
| [7] | 高程, 都延丽, 步雨浓, 刘燕斌, 王宇飞. 面向复杂多任务的异构无人机集群分组调配[J]. 系统工程与电子技术, 2024, 46(3): 972-981. |
| [8] | 郝文康, 陈琪锋. 无人机编队模糊约束分布式模型预测节能控制[J]. 系统工程与电子技术, 2024, 46(3): 1021-1030. |
| [9] | 桂洋, 郑柏超, 高鹏. 基于NESO-LFDC的四旋翼无人机滑模姿态控制[J]. 系统工程与电子技术, 2024, 46(3): 1075-1083. |
| [10] | 裴立冠, 周唯, 刘经东. 基于布谷鸟搜索算法的机动化箔条幕布放方法研究[J]. 系统工程与电子技术, 2024, 46(3): 814-823. |
| [11] | 刘世豪, 黄仰超, 胡航, 司江勃, 韩蕙竹, 安琪. 无人机群辅助边缘计算系统的任务卸载和资源分配联合优化[J]. 系统工程与电子技术, 2024, 46(2): 751-760. |
| [12] | 杨勇, 王雪松. 基于杂波拖尾分布的雷达无人机检测性能分析[J]. 系统工程与电子技术, 2024, 46(1): 113-120. |
| [13] | 曹原, 寇英信, 李勇祥. 基于目标暴露区的地面防空兵力最佳配置区规划[J]. 系统工程与电子技术, 2024, 46(1): 196-204. |
| [14] | 薛锡瑞, 黄树彩, 韦道知, 吴建峰. 基于EMD-DESN的无人机集群航迹目的地预测[J]. 系统工程与电子技术, 2024, 46(1): 290-299. |
| [15] | 莫昱, 唐旭东. 基于改进自抗扰控制的电动伺服系统机械谐振抑制方法[J]. 系统工程与电子技术, 2024, 46(1): 309-317. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||