
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (5): 1756-1766.doi: 10.12305/j.issn.1001-506X.2024.05.28
• 制导、导航与控制 • 上一篇
隋东, 杨振宇, 丁松滨, 周婷婷
收稿日期:2023-05-15
出版日期:2024-04-30
发布日期:2024-04-30
通讯作者:
杨振宇
作者简介:隋东 (1971—), 男, 副教授, 博士, 主要研究方向为空域规划与安全性分析基金资助:Dong SUI, Zhenyu YANG, Songbin DING, Tingting ZHOU
Received:2023-05-15
Online:2024-04-30
Published:2024-04-30
Contact:
Zhenyu YANG
摘要:
针对无人机(unmanned aerial vehicle, UAV)三维航迹规划问题, 提出一种增强型多策略蜣螂算法的UAV航迹规划方法。首先, 将飞行接近率和响应时间的动态约束添加到威胁成本代价中, 并考虑UAV转弯性能的影响, 建立三维任务空间模型与航迹代价函数。其次, 在蜣螂算法中引入偏移估计策略、变螺旋搜索策略、准反向学习策略和逐维变异策略, 提高算法的全局寻优能力和收敛速度。最后, 给出了改进算法在三维环境下航迹规划的仿真结果。结果表明: 综合考虑UAV机动性能和转弯性能, 规划出的路径可以更加安全有效地避开危险源。相比其他算法, 改进算法的寻优能力更好, 规划的航迹质量更优。
中图分类号:
隋东, 杨振宇, 丁松滨, 周婷婷. 基于EMSDBO算法的无人机三维航迹规划[J]. 系统工程与电子技术, 2024, 46(5): 1756-1766.
Dong SUI, Zhenyu YANG, Songbin DING, Tingting ZHOU. Three-dimensional path planning of UAV based on EMSDBO algorithm[J]. Systems Engineering and Electronics, 2024, 46(5): 1756-1766.

图1
航迹规划示意图"


图2
威胁代价计算模型"

表1
飞行模式判断"
| 飞行模式 | 判断条件 | 速度 |
| 水平飞行 | ϕt≤ϕ0且ψt≤ψ0 | v1 |
| 偏转转弯 | ϕt>ϕ0且ψt≤ψ0 | v2 |
| 爬升下降 | ϕt≤ϕ0且ψt>ψ0 | v3 |
表2
基础测试函数"
| 函数类别 | 公式表达式 | 维度 | 搜索范围 | 最优值 |
| 单峰函数 | 30 | [-100, 100] | 0 | |
| 30 | [-100, 100] | 0 | ||
| 30 | [-100, 100] | 0 | ||
| 30 | [-1.28, 1.28] | 0 | ||
| 多峰函数 | 30 | [-5.12, 5.12] | 0 | |
| 30 | [-600, 600] | 0 |
表3
不同算法性能对比"
| 测试函数 | 统计值 | EMSDBO | DBO | GWO | WOA | NGO |
| f1 | 最优值 | 0.00 E+00 | 1.12 E-142 | 5.76 E-30 | 2.75 E-82 | 1.43 E-89 |
| 平均值 | 0.00 E+00 | 2.83 E-106 | 1.14 E-27 | 6.91 E-73 | 4.37 E-87 | |
| 标准差 | 0.00 E+00 | 1.92 E-105 | 2.22 E-27 | 2.72 E-72 | 1.86 E-86 | |
| f2 | 最优值 | 0.00 E+00 | 2.02 E-96 | 9.17 E-09 | 7.56 E+04 | 4.98 E-28 |
| 平均值 | 0.00 E+00 | 2.56 E-40 | 5.87 E-06 | 1.49 E+04 | 1.84 E-22 | |
| 标准差 | 0.00 E+00 | 1.29 E-39 | 1.40 E-05 | 4.79 E+04 | 8.18 E-22 | |
| f3 | 最优值 | 6.67 E-12 | 4.80 E-06 | 2.49 E-01 | 9.34 E-02 | 7.17 E-07 |
| 平均值 | 1.17 E-10 | 4.86 E-03 | 7.76 E-01 | 3.85 E-01 | 7.73 E-04 | |
| 标准差 | 1.30 E-10 | 2.38 E-02 | 3.50 E-01 | 2.41 E-01 | 3.40 E-03 | |
| f4 | 最优值 | 3.45 E-06 | 9.52 E-05 | 3.38 E-04 | 5.58 E-07 | 1.86 E-04 |
| 平均值 | 7.22 E-05 | 1.39 E-03 | 2.00 E-03 | 2.97 E-03 | 6.29 E-04 | |
| 标准差 | 5.66 E-05 | 1.04 E-03 | 1.09 E-03 | 2.94 E-03 | 3.16 E-04 | |
| f5 | 最优值 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 |
| 平均值 | 0.00 E+00 | 7.96 E-01 | 2.87 E+00 | 1.14 E-15 | 0.00 E+00 | |
| 标准差 | 0.00 E+00 | 4.01 E+00 | 3.71 E+00 | 8.04 E-15 | 0.00 E+00 | |
| f6 | 最优值 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 |
| 平均值 | 0.00 E+00 | 4.26 E-04 | 5.03 E-03 | 1.76 E-02 | 0.00 E+00 | |
| 标准差 | 0.00 E+00 | 3.01 E-03 | 1.04 E-02 | 6.83 E-03 | 0.00 E+00 |

图3
函数收敛曲线"

表4
不同改进策略的性能对比"
| 函数 | 统计值 | DBO | ODBO | SDBO | QDBO | VDBO | EMSDBO |
| f1 | 最优值 | 1.12 E-142 | 2.24 E-148 | 5.82 E-155 | 0.00 E+00 | 2.11 E-213 | 0.00 E+00 |
| 平均值 | 2.83 E-106 | 3.84 E-121 | 1.94 E-114 | 0.00 E+00 | 4.93 E-107 | 0.00 E+00 | |
| 标准差 | 1.92 E-105 | 1.22 E-110 | 1.06 E-113 | 0.00 E+00 | 3.49 E-106 | 0.00 E+00 | |
| f2 | 最优值 | 2.02 E-96 | 1.20 E-72 | 2.21 E-75 | 0.00 E+00 | 1.90 E-101 | 0.00 E+00 |
| 平均值 | 2.56 E-40 | 1.56 E-42 | 5.84 E-54 | 0.00 E+00 | 5.91 E-38 | 0.00 E+00 | |
| 标准差 | 1.29 E-39 | 8.93 E-39 | 3.81 E-53 | 0.00 E+00 | 3.95 E-40 | 0.00 E+00 | |
| f3 | 最优值 | 4.80 E-06 | 2.82 E-07 | 4.22 E-06 | 5.76 E-07 | 8.94 E-10 | 6.67 E-12 |
| 平均值 | 4.86 E-03 | 1.51 E-06 | 6.46 E-04 | 3.56 E-03 | 8.54 E-08 | 1.17 E-10 | |
| 标准差 | 2.38 E-02 | 8.10 E-07 | 5.45 E-04 | 1.97 E-02 | 2.13 E-07 | 1.30 E-10 | |
| f4 | 最优值 | 9.52 E-05 | 2.28 E-05 | 2.10 E-06 | 1.57 E-04 | 3.54 E-05 | 3.45 E-06 |
| 平均值 | 1.39 E-03 | 1.14 E-03 | 1.14 E-04 | 1.04 E-03 | 7.96 E-04 | 7.22 E-05 | |
| 标准差 | 1.04 E-03 | 8.27 E-04 | 9.01 E-05 | 8.05 E-04 | 7.11 E-04 | 5.66 E-05 | |
| f5 | 最优值 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 |
| 平均值 | 7.96 E-01 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | |
| 标准差 | 4.01 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | |
| f6 | 最优值 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 |
| 平均值 | 4.26 E-04 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | |
| 标准差 | 3.01 E-03 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 |
表5
仿真实验参数设置"
| 参数名称 | 设置值 | 参数名称 | 设置值 | |
| m | 15 | tmin/s | 3 | |
| ϕmax/(°) | 45 | v1/(m/s) | 15 | |
| ψmax/(°) | 45 | v2/(m/s) | 10 | |
| lmin/m | 30 | v3/(m/s) | 6 | |
| α1 | 0.6 | tmin/s | 2 | |
| α2 | 0.4 | T | 10 | |
| ϕ0/(°) | 30 | w1 | 0.4 | |
| ψ0/(°) | 30 | w2 | 0.2 | |
| hmax/m | 400 | w3 | 0.2 | |
| hmin/m | 100 | w4 | 0.2 |

图4
不同威胁场景飞行路径"

表6
不同威胁场景实验平均结果"
| 实验场景 | 最小响应时间/s | 平均航程距离/m | 威胁成本 |
| 本文场景 | 5.44 | 1 018.5 | 45.9 |
| 场景1 | 5.68 | 978.02 | 61.0 |
| 场景2 | 11.48 | 1 068.2 | 28.7 |

图5
飞行三维航迹图"
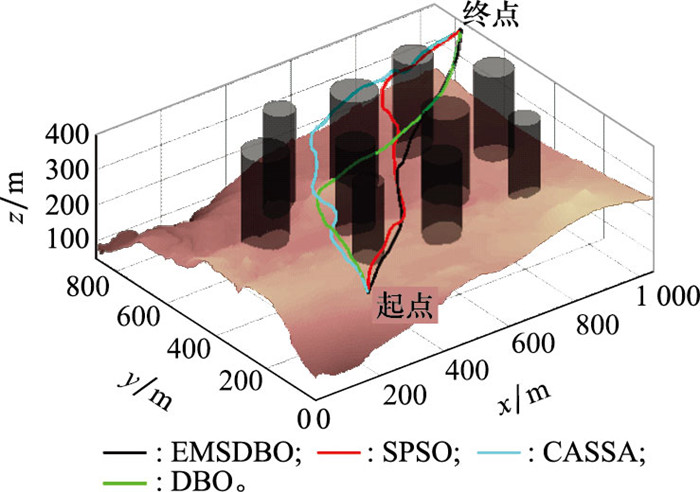

图6
飞行航迹俯视图"


图7
4种算法收敛曲线"

表7
4种算法实验平均结果对比"
| 算法名称 | F1 | F2 | F3 | F4 | F | 寻路成功率/% | ||
| Fbest | Fmean | Fstd | ||||||
| EMSDBO | 1 125.8 | 142.1 | 114.7 | 60.0 | 476.6 | 517.9 | 18.8 | 100 |
| SPSO | 1 278.5 | 227.1 | 158.7 | 70.3 | 506.8 | 602.6 | 64.9 | 86 |
| CASSA | 1 276.7 | 251.1 | 159.3 | 83.5 | 515.9 | 609.4 | 40.4 | 100 |
| DBO | 1 263.9 | 224.0 | 180.5 | 37.4 | 553.0 | 593.9 | 26.2 | 80 |

图8
总代价函数箱线图"

| 20 |
XUE J K , SHEN B . Dung beetle optimizer: a new meta-heuristic algorithm for global optimization[J]. The Journal of Supercomputing, 2023, 79, 7305- 7336.
doi: 10.1007/s11227-022-04959-6 |
| 21 | GUO J J , YUAN W C , DANG X Z , et al. Cable force optimization of a curved cable-stayed bridge with combined simulated annealing method and cubic B-Spline interpolation curves[J]. Engineering Structures, 2019, 201 (1): 109813. |
| 22 | 张洪海, 邹依原, 张启钱, 等. 未来城市空中交通管理研究综述[J]. 航空学报, 2021, 42 (7): 82- 106. |
| ZHANG H H , ZOU Y Y , ZHANG Q Q , et al. Future urban air mobility management: review[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42 (7): 82- 106. | |
| 23 |
张军峰, 蒋海行, 武晓光, 等. 基于BADA及航空器意图的四维航迹预测[J]. 西南交通大学学报, 2014, 49 (3): 553- 558.
doi: 10.3969/j.issn.0258-2724.2014.03.028 |
|
ZHANG J F , JIANG H X , WU X G , et al. 4D trajectory prediction based on BADA and aircraft intent[J]. Journal of Southwest Jiaotong University, 2014, 49 (3): 553- 558.
doi: 10.3969/j.issn.0258-2724.2014.03.028 |
|
| 24 |
JIANG H , DENG J H , CHEN Q S . Olfactory sensor combined with chemometrics analysis to determine fatty acid in stored wheat[J]. Food Control, 2023, 153, 109942- 109961.
doi: 10.1016/j.foodcont.2023.109942 |
| 25 |
WU C L , FU J C , HUANG X R , et al. Lithium-ion battery health state prediction based on VMD and DBO-SVR[J]. Energies, 2023, 16 (10): 3993- 4012.
doi: 10.3390/en16103993 |
| 26 | ZHU F , LI G S , TANG H , et al. Dung beetle optimization algorithm based on quantum computing and multi-strategy fusion for solving engineering problems[J]. Expert Systems with Applications, 2024, 236 (1): 121219- 121237. |
| 27 |
HAUSCHILD M , PELIKAN M . An introduction and survey of estimation of distribution algorithms[J]. Swarm and evolutionary computation, 2011, 1 (3): 111- 128.
doi: 10.1016/j.swevo.2011.08.003 |
| 28 | MIRJALILI S , LEWIS A . The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95 (1): 51- 67. |
| 1 | CHAO D , WU Q H . Survey of layered architecture in largescale FANETs[J]. Computer Science, 2020, 47 (9): 226- 231. |
| 2 | 赵畅, 刘允刚, 陈琳, 等. 面向元启发式算法的多无人机路径规划现状与展望[J]. 控制与决策, 2022, 37 (5): 1102- 1115. |
| ZHAO C , LIU Y G , CHEN L , et al. Research and development trend of multi-UAV path planning based on metaheuristic algorithm[J]. Control and Decision, 2022, 37 (5): 1102- 1115. | |
| 3 |
杨旭, 王锐, 张涛. 面向无人机集群路径规划的智能优化算法综述[J]. 控制理论与应用, 2020, 37 (11): 2291- 2302.
doi: 10.7641/CTA.2020.00105 |
|
YANG X , WANG R , ZHANG T . Review of unmanned aerial vehicle swarm path planning based on intelligent optimization[J]. Control Theory & Applications, 2020, 37 (11): 2291- 2302.
doi: 10.7641/CTA.2020.00105 |
|
| 4 |
ZENG Y , ZHANG R . Energy-efficient UAV communication with trajectory optimization[J]. IEEE Trans.on Wireless Communications, 2017, 16 (6): 3747- 3760.
doi: 10.1109/TWC.2017.2688328 |
| 5 | AGGARWAL S , KUMAR N . Path planning techniques for unmanned aerial vehicles: a review, solutions, and challenges[J]. Computer Communications, 2020, 149 (1): 270- 299. |
| 6 | WANG H B , YIN P H , ZHENG W , et al. Mobile robot path planning based on improved A* algorithm and dynamic window method[J]. Robot, 2020, 42 (3): 92- 99. |
| 7 |
LI W M , WANG L , ZOU A W , et al. Path planning for UAV based on improved PRM[J]. Energies, 2022, 15 (19): 7267- 7283.
doi: 10.3390/en15197267 |
| 8 | MIN Y , LUO J J , WANG M M , et al. Coordinated path planning by integrating improved RRT* and quartic spline[J]. Chinse Journal of Mechanics, 2020, 52 (4): 1024- 1034. |
| 9 |
QI B K , LI M Q , YANG Y , et al. Research on UAV path planning obstacle avoidance algorithm based on improved artificial potential field method[J]. Journal of Physics: Conference Series, 2021, 1948 (1): 012060.
doi: 10.1088/1742-6596/1948/1/012060 |
| 10 | JIANG C K , LI Z , PAN S B , et al. Collision-free path planning of AGVs based on improved dijkstra algorithm[J]. Computer Science, 2020, 47 (8): 272- 277. |
| 11 |
WANG Y H , WANG S M . UAV path planning based on improved particle swarm optimization[J]. Computer Engineering & Science, 2020, 42 (9): 1690- 1696.
doi: 10.3969/j.issn.1007-130X.2020.09.020 |
| 12 | CAO Y , WEI W Y , BAI Y , et al. Multi-base multi-UAV cooperative reconnaissance path planning with genetic algorithm[J]. Cluster Computing, 2019, 22 (1): 5175- 5184. |
| 13 |
ZHANG X M , HU Y J , LI W G , et al. Mission planning of multi base UAV based on improved artificial bee colony algorithm[J]. Journal of Physics: Conference Series, 2020, 1550 (3): 32072- 32096.
doi: 10.1088/1742-6596/1550/3/032072 |
| 14 |
JARRAY R , AL-DHAIFALLAH M , REZK H , et al. Parallel cooperative coevolutionary grey wolf optimizer for path planning problem of unmanned aerial vehicles[J]. Sensors, 2022, 22 (5): 1826- 1848.
doi: 10.3390/s22051826 |
| 15 |
刘志强, 何丽, 袁亮, 等. 采用改进灰狼算法的移动机器人路径规划[J]. 西安交通大学学报, 2022, 56 (10): 49- 60.
doi: 10.7652/xjtuxb202210005 |
|
LIU Z Q , HE L , YUAN L , et al. Path planning of mobile robot based on TGWO algorithm[J]. Journal of Xi'an Jiaotong University, 2022, 56 (10): 49- 60.
doi: 10.7652/xjtuxb202210005 |
|
| 16 | LIN N , TANG J C , LI X W , et al. A novel improved bat algorithm in UAV path planning[J]. Computers, Materials & Continua, 2019, 61 (1): 323- 344. |
| 17 | YU W W , LIU J , ZHOU J . A novel sparrow particle swarm algorithm (SPSA) for unmanned aerial vehicle path planning[J]. Scientific Programming, 2021, 2021 (1): 5158304. |
| 18 | PHUNG M D , HA Q P . Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization[J]. Applied Soft Computing, 2021, 107 (1): 107376- 107395. |
| 19 | ZHAI L Z , FENG S H . A novel evacuation path planning method based on improved genetic algorithm[J]. Journal of Intelligent & Fuzzy Systems, 2022, 42 (3): 1813- 1823. |
| 29 |
WANG H , WU Z J , RAHNAMAYAN S , et al. Enhancing particle swarm optimization using generalized opposition-based learning[J]. Information Sciences, 2011, 181 (20): 4699- 4714.
doi: 10.1016/j.ins.2011.03.016 |
| 30 | ZHANG X M , WANG D D , FU Z H , et al. Novel biogeography-based optimization algorithm with hybrid migration and global-best Gaussian mutation[J]. Applied Mathematical Modelling, 2020, 86 (1): 74- 91. |
| 31 | MIRJALILI S , MIRJALILI S M , LEWIS A . Grey wolf optimizer[J]. Advances in Engineering Software, 2014, 69 (1): 46- 61. |
| 32 | DEHGHANI M , HUBALOVSKY S , TROJOVSKY P . Northern goshawk optimization: a new swarm-based algorithm for solving optimization problems[J]. IEEE Access, 2021, 9 (1): 162059- 162080. |
| 33 |
LIU G Y , SHU C , LIANG Z W , et al. A modified sparrow search algorithm with application in 3D route planning for UAV[J]. Sensors, 2021, 21 (4): 1224- 1245.
doi: 10.3390/s21041224 |
| [1] | 赵晓琛, 赵东涛, 袁航, 王欢, 张群. 低脉冲重复频率条件下无人机微动参数提取[J]. 系统工程与电子技术, 2024, 46(5): 1503-1513. |
| [2] | 陶灿灿, 周锐. 面向空地中继网络优化的无人机运动控制方法[J]. 系统工程与电子技术, 2024, 46(5): 1712-1723. |
| [3] | 孙家玮, 余明晖, 杨大鹏, 汤皓泉, 卞大鹏. 基于CL-RRT与MPC的舰载机牵引系统路径规划[J]. 系统工程与电子技术, 2024, 46(5): 1745-1755. |
| [4] | 刘钢, 安志镖, 张茂军, 刘煜, 李武. 基于连续路网环境的实体化主体路径规划算法[J]. 系统工程与电子技术, 2024, 46(4): 1346-1356. |
| [5] | 赵贵祥, 周健, 李云淼, 王晨旭. 改进双向快速搜索随机树的无人艇路径规划[J]. 系统工程与电子技术, 2024, 46(4): 1364-1371. |
| [6] | 毕文豪, 张梦琦, 高飞, 杨咪, 张安. 无人机集群任务分配技术研究综述[J]. 系统工程与电子技术, 2024, 46(3): 922-934. |
| [7] | 刘涛, 王沙沙, 张驰, 白光晗, 陶俊勇. 考虑韧性的无人机集群自组织区域覆盖方法[J]. 系统工程与电子技术, 2024, 46(3): 942-952. |
| [8] | 高程, 都延丽, 步雨浓, 刘燕斌, 王宇飞. 面向复杂多任务的异构无人机集群分组调配[J]. 系统工程与电子技术, 2024, 46(3): 972-981. |
| [9] | 郝文康, 陈琪锋. 无人机编队模糊约束分布式模型预测节能控制[J]. 系统工程与电子技术, 2024, 46(3): 1021-1030. |
| [10] | 桂洋, 郑柏超, 高鹏. 基于NESO-LFDC的四旋翼无人机滑模姿态控制[J]. 系统工程与电子技术, 2024, 46(3): 1075-1083. |
| [11] | 裴立冠, 周唯, 刘经东. 基于布谷鸟搜索算法的机动化箔条幕布放方法研究[J]. 系统工程与电子技术, 2024, 46(3): 814-823. |
| [12] | 刘世豪, 黄仰超, 胡航, 司江勃, 韩蕙竹, 安琪. 无人机群辅助边缘计算系统的任务卸载和资源分配联合优化[J]. 系统工程与电子技术, 2024, 46(2): 751-760. |
| [13] | 杨勇, 王雪松. 基于杂波拖尾分布的雷达无人机检测性能分析[J]. 系统工程与电子技术, 2024, 46(1): 113-120. |
| [14] | 薛锡瑞, 黄树彩, 韦道知, 吴建峰. 基于EMD-DESN的无人机集群航迹目的地预测[J]. 系统工程与电子技术, 2024, 46(1): 290-299. |
| [15] | 王中宝, 尹奎英. 基于联合域滤波的无人机载SAR图像块效应抑制方法[J]. 系统工程与电子技术, 2023, 45(9): 2768-2776. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||