
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (4): 1383-1392.doi: 10.12305/j.issn.1001-506X.2024.04.27
卜瑞宇, 王彪, 李宏成, 唐超颖, 朱日楠
收稿日期:2022-10-18
出版日期:2024-03-25
发布日期:2024-03-25
通讯作者:
王彪
作者简介:卜瑞宇(1998—), 男, 硕士研究生, 主要研究方向为地形跟随飞行控制Ruiyu BU, Biao WANG, Hongcheng LI, Chaoying TANG, Rinan ZHU
Received:2022-10-18
Online:2024-03-25
Published:2024-03-25
Contact:
Biao WANG
摘要:
针对地形跟随飞行中的航迹跟踪问题, 设计了航迹跟踪模型预测控制器, 并讨论了模型预测控制中时域参数切换的自适应方案设计。首先, 结合被控对象的特点, 设计了用于实现全局稳定跟踪参考航迹的模型预测航迹控制器, 并对控制器展开了稳定性分析。然后, 充分发挥模型预测控制的预测能力, 进行了航迹跟踪方法和综合误差评价策略设计。同时, 通过分析不同航迹段的跟踪需求, 设计了自适应调整模型预测控制中时域参数的优化方案。仿真验证结果表明, 自适应方案相比固定时域方案航迹跟踪精度更高、飞行颠簸小、稳定性好, 预设的评价指标函数能有效评估跟踪性能。
中图分类号:
卜瑞宇, 王彪, 李宏成, 唐超颖, 朱日楠. 地形跟随中航迹跟踪模型预测控制方案设计[J]. 系统工程与电子技术, 2024, 46(4): 1383-1392.
Ruiyu BU, Biao WANG, Hongcheng LI, Chaoying TANG, Rinan ZHU. Design of trajectory tracking model predictive control scheme in terrain following[J]. Systems Engineering and Electronics, 2024, 46(4): 1383-1392.

图1
整体控制框图"


图2
控制序列关系"


图3
惯性系下跟踪控制与误差评价示意图"


图4
机体系下误差评价示意图"
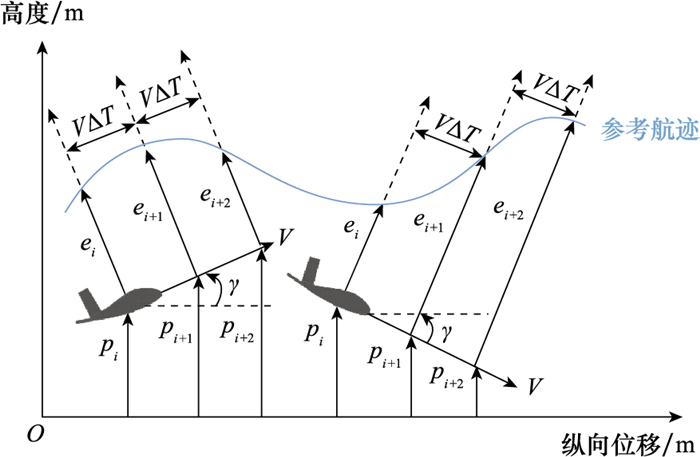

图5
时域参数对航迹跟踪影响示意图"


图6
坡度、曲率数据"


图7
预测时域自适应调整"


图8
不同参数选择下航迹角跟踪效果"


图9
不同参数选择下速度控制效果"


图10
控制增量变化结果"


图11
不同参数选择下的油门开度"


图12
不同参数选择下的升降舵偏转"


图13
不同参数选择下的地形跟随飞行效果"


图14
惯性系及机体系下的跟踪误差"

表1
误差统计数据"
| 时域参数 | 坐标系类别 | edm/m | eds/m | eγm/(×10-3 rad) | edmax/m | edmin/m | Sw |
| Np=20 | 惯性系 | 2.6 | 2.4 | 12.7 | 14.0 | 12.4 | 77.7 |
| 机体系 | 2.5 | 2.2 | 12.3 | 13.5 | 11.7 | 73.4 | |
| Np=25 | 惯性系 | 2.1 | 1.7 | 12.5 | 9.0 | 9.6 | 57.9 |
| 机体系 | 2.3 | 1.8 | 12.1 | 9.5 | 10.3 | 62.0 | |
| Np=30 | 惯性系 | 2.4 | 1.7 | 11.0 | 10.5 | 7.6 | 60.2 |
| 机体系 | 2.3 | 1.7 | 11.1 | 10.2 | 8.2 | 59.5 | |
| 自适应方案 | 惯性系 | 1.5 | 1.2 | 9.3 | 6.8 | 6.4 | 41.1 |
| 机体系 | 1.4 | 1.2 | 9.7 | 6.7 | 6.6 | 40.2 |
表2
优化求解时间"
| 时域参数 | Np=20 | Np=25 | Np=30 | 自适应方案 |
| Tmean | 0.79 | 0.84 | 0.94 | 1.60 |
| Tmax | 12.10 | 6.50 | 9.40 | 14.70 |

图15
不同时域参数下的优化求解时间"


图16
预测时域与飞行速度的拟合关系"


图17
控制时域与飞行速度的拟合关系"

| 1 | LIVSHITZ A , IDAN M .Preview control approach for laser range finder based terrain following[J].IEEE Trans.on Aerospace and Electronic Systems,2019,56(2):1318-1331. |
| 2 |
KAZEMIFAR O , BABAEI A R , MORTAZAVI M .Online aircraft velocity and normal acceleration planning for rough terrain following[J].The Aeronautical Journal,2017,121(1244):1561-1577.
doi: 10.1017/aer.2017.27 |
| 3 |
LU P , PIERSON B L .Aircraft terrain following based on a nonlinear continuous predictive control approach[J].Journal of Guidance, Control, and Dynamics,1995,18(4):817-823.
doi: 10.2514/3.21464 |
| 4 |
LIVSHITZ A , IDAN M .Low-cost laser range-measurement-based terrain-following concept and error analysis[J].Journal of Guidance, Control, and Dynamics,2018,41(4):1006-1014.
doi: 10.2514/1.G002565 |
| 5 |
NOORDIN A , MOHD BASRI M A , MOHAMED Z , et al.Adaptive PID controller using sliding mode control approaches for quadrotor UAV attitude and position stabilization[J].Arabian Journal for Science and Engineering,2021,46(2):963-981.
doi: 10.1007/s13369-020-04742-w |
| 6 |
ZHANG S C , XUE X Y , CHEN C , et al.Development of a low-cost quadrotor UAV based on ADRC for agricultural remote sensing[J].International Journal of Agricultural and Biological Engineering,2019,12(4):82-87.
doi: 10.25165/j.ijabe.20191204.4641 |
| 7 | MINH V T , MOEZZI R , DHOSKA K , et al.Model predictive control for autonomous vehicle tracking[J].International Journal of Innovative Technology and Interdisciplinary Sciences,2021,4(1):560-603. |
| 8 | 郑世钰, 艾晓琳, 杨迪.基于积分反步法的四旋翼滑模轨迹跟踪算法[J].系统工程与电子技术,2019,41(3):643-650. |
| ZHENG S Y , AI X L , YANG D .Integral backstepping based sliding mode trajectory tracking algorithm for quadrotor[J].Systems Engineering and Electronics,2019,41(3):643-650. | |
| 9 |
XIAN B , GUO J C , ZHANG Y .Adaptive backstepping tracking control of a 6-DOF unmanned helicopter[J].IEEE/CAA Journal of Automatica Sinica,2015,2(1):19-24.
doi: 10.1109/JAS.2015.7032902 |
| 10 |
ZHENG H , NEGENBORN R R , LODEWIJKS G .Trajectory tracking of autonomous vessels using model predictive control[J].IFAC Proceedings Volumes,2014,47(3):8812-8818.
doi: 10.3182/20140824-6-ZA-1003.00767 |
| 11 | LAPP T, SINGH L. Model predictive control based trajectory optimization for nap-of-the-earth (NOE) flight including obstacle avoidance[C]//Proc. of the IEEE American Control Conference, 2004, 1: 891-896. |
| 12 | 王晓海, 孟秀云, 李传旭.基于MPC的无人机航迹跟踪控制器设计[J].系统工程与电子技术,2021,43(1):191-198. |
| WANG X H , MENG X Y , LI C X .Design of trajectory tracking controller for UAV based on MPC[J].Systems Engineering and Electronics,2021,43(1):191-198. | |
| 13 |
MAYNE D Q , RAWLINGS J B , RAO C V , et al.Constrained model predictive control: stability and optimality[J].Automatica,2000,36(6):789-814.
doi: 10.1016/S0005-1098(99)00214-9 |
| 14 |
SCOKAERT P O M , MAYNE D Q .Min-max feedback model predictive control for constrained linear systems[J].IEEE Trans.on Automatic Control,1998,43(8):1136-1142.
doi: 10.1109/9.704989 |
| 15 |
ZHANG B , ZONG C F , CHEN G Y , et al.An adaptive-prediction-horizon model prediction control for path tracking in a four-wheel independent control electric vehicle[J].Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering,2019,233(12):3246-3262.
doi: 10.1177/0954407018821527 |
| 16 |
GRIFFITH D W , BIEGLER L T , PATWARDHAN S C .Robustly stable adaptive horizon nonlinear model predictive control[J].Journal of Process Control,2018,70,109-122.
doi: 10.1016/j.jprocont.2018.07.014 |
| 17 |
BØHN E , GROS S , MOE S , et al.Reinforcement learning of the prediction horizon in model predictive control[J].IFAC-PapersOnLine,2021,54(6):314-320.
doi: 10.1016/j.ifacol.2021.08.563 |
| 18 |
BHATTACHARYA R , BALAS G J , KAYA M A , et al.Nonlinear receding horizon control of an F-16 aircraft[J].Journal of Guidance, Control, and Dynamics,2002,25(5):924-931.
doi: 10.2514/2.4965 |
| 19 |
FU NK , JAMES E .Optimal-path precision terrain-following system[J].Journal of Aircraft,1977,14(2):128-134.
doi: 10.2514/3.58755 |
| 20 |
AL-GABALAWY M , HOSNY N S , ABORISHA A S .Model predictive control for a basic adaptive cruise control[J].International Journal of Dynamics and Control,2021,9(3):1132-1143.
doi: 10.1007/s40435-020-00732-w |
| 21 | YANG H J , GUO M C , XIA Y Q , et al.Trajectory tracking for wheeled mobile robots via model predictive control with softening constraints[J].IET Control Theory & Applications,2017,12(2):206-214. |
| 22 |
LIU C X , GAO J , XU D M .Lyapunov-based model predictive control for tracking of nonholonomic mobile robots under input constraints[J].International Journal of Control, Automation and Systems,2017,15(5):2313-2319.
doi: 10.1007/s12555-016-0350-x |
| 23 | 孙峻. 非线性模型预测控制理论及应用研究[D]. 西安: 西北工业大学, 2002. |
| SUN J. Study on the theories and applications of nonlinear model predictive control[D]. Xi'an: Northwestern Polytechnical University, 2002. | |
| 24 |
LEE J H .Model predictive control: review of the three de-cades of development[J].International Journal of Control, Automation and Systems,2011,9(3):415-424.
doi: 10.1007/s12555-011-0300-6 |
| 25 |
CAMPONOGARA E , JIA D , KROGH B H , et al.Distributed model predictive control[J].IEEE Control Systems Magazine,2002,22(1):44-52.
doi: 10.1109/37.980246 |
| 26 | YUAN X F , HUANG G M , SHI K .Improved adaptive path following control system for autonomous vehicle in different velocities[J].IEEE Trans.on Intelligent Transportation Systems,2019,21(8):3247-3256. |
| 27 | JI J , KHAJEPOUR A , MELEK W W , et al.Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J].IEEE Trans.on Vehicular Technology,2016,66(2):952-964. |
| 28 |
ZHENG H , NEGENBORN R R , LODEWIJKS G .Trajectory tracking of autonomous vessels using model predictive control[J].IFAC Proceedings Volumes,2014,47(3):8812-8818.
doi: 10.3182/20140824-6-ZA-1003.00767 |
| 29 |
YANG K , KANG Y , SUKKARIEH S .Adaptive nonlinear model predictive path-following control for a fixed-wing unmanned aerial vehicle[J].International Journal of Control, Automation and Systems,2013,11(1):65-74.
doi: 10.1007/s12555-012-0028-y |
| 30 |
TOWNSEND J L , BLATT P E .New MIL-F-9490D requirements and implications on future flight control design[J].Journal of Aircraft,1976,13(9):670-675.
doi: 10.2514/3.58698 |
| [1] | 郝文康, 陈琪锋. 无人机编队模糊约束分布式模型预测节能控制[J]. 系统工程与电子技术, 2024, 46(3): 1021-1030. |
| [2] | 胡树欣, 张安, 孙嫚憶, 李铭浩. 基于一致性理论和S-MPC的四旋翼编队协同避障[J]. 系统工程与电子技术, 2024, 46(2): 658-667. |
| [3] | 张亮, 刘思, 赵康伟, 胡存明. 运载火箭自适应增广控制参数设计及稳定性裕度分析[J]. 系统工程与电子技术, 2024, 46(1): 271-279. |
| [4] | 张宏, 吴云华, 钟胜钧, 郭海波. 基于反步法的空间目标复合指向控制方法研究[J]. 系统工程与电子技术, 2023, 45(9): 2884-2893. |
| [5] | 徐文丰, 李颖晖, 裴彬彬, 禹志龙. 基于多模型MPC的变体飞机协调优化控制[J]. 系统工程与电子技术, 2023, 45(9): 2902-2911. |
| [6] | 陈旭, 肖瑶, 杨凌宇, 张晶. 基于简化模型的天线罩寄生回路稳定性分析[J]. 系统工程与电子技术, 2023, 45(6): 1784-1796. |
| [7] | 宋超, 李波, 马云红, 黄晶益. 基于优化A*和MPC融合算法的三维无人机航迹规划[J]. 系统工程与电子技术, 2023, 45(12): 3995-4004. |
| [8] | 柳子然, 戴梓健, 岳程斐, 王培基, 曹喜滨. 基于高斯混合过程的空间机器人任务空间预测控制方法[J]. 系统工程与电子技术, 2023, 45(11): 3597-3605. |
| [9] | 孙田野, 孙伟, 吴建军. 改进Quatre算法的无人机编队快速集结方法[J]. 系统工程与电子技术, 2022, 44(9): 2840-2848. |
| [10] | 胥彪, 李翔, 李爽, 张金鹏. 基于非线性模型预测控制的火星大气进入智能制导方法[J]. 系统工程与电子技术, 2021, 43(7): 1943-1953. |
| [11] | 王晓海, 孟秀云, 李传旭. 基于MPC的无人机航迹跟踪控制器设计[J]. 系统工程与电子技术, 2021, 43(1): 191-198. |
| [12] | 杨宇, 吴达, 高峰, 邓建军. 适用于超低空拦截的复合制导律设计方法[J]. 系统工程与电子技术, 2021, 43(1): 208-215. |
| [13] | 刘帅, 赵国荣, 曾宾, 高超. 带丢包和量化的参数不确定系统滚动时域估计[J]. 系统工程与电子技术, 2020, 42(4): 912-918. |
| [14] | 朱梦圆, 吕娜, 陈柯帆, 钟赟, 刘创, 高维廷. 航空集群协同搜索马尔可夫运动目标方法[J]. 系统工程与电子技术, 2019, 41(9): 2041-2047. |
| [15] | 宋敏, 戴静, 孔韬. 基于NMPC的无人机自主防撞控制方法[J]. 系统工程与电子技术, 2019, 41(9): 2092-2099. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||