
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (4): 1372-1382.doi: 10.12305/j.issn.1001-506X.2024.04.26
何通, 卢青, 周军, 郭宗易
收稿日期:2023-03-14
出版日期:2024-03-25
发布日期:2024-03-25
通讯作者:
卢青
作者简介:何通(1989—), 男, 硕士研究生, 主要研究方向为多弹多目标协同作战基金资助:Tong HE, Qing LU, Jun ZHOU, Zongyi GUO
Received:2023-03-14
Online:2024-03-25
Published:2024-03-25
Contact:
Qing LU
摘要:
针对具有终端视线(line-of-sight, LOS)角约束的机动目标拦截问题, 提出一种基于径向基函数(radial basis function, RBF)神经网络干扰观测器的LOS角约束制导方法。首先, 考虑目标机动过程中加速度信息无法获取的情况, 给出了一种基于RBF神经网络的干扰观测器, 实现了对目标机动的高精度估计; 其次, 充分考虑终端角度约束, 结合超螺旋算法思想, 通过幂次项的引入设计了一种改进的滑模制导律, 从而有效提升了有限过载情况下的制导精度; 在此基础上, 通过Lyapunov定理对算法的收敛性和稳定性分别进行了证明; 最后, 通过仿真验证对比了3种不同方法在4种拦截场景下的制导性能, 同时针对所提方法进行了蒙特卡罗打靶仿真, 仿真结果表明所给出的LOS角约束制导律对机动目标拦截精度高、鲁棒性强。
中图分类号:
何通, 卢青, 周军, 郭宗易. 带有神经网络干扰观测器的视线角约束制导[J]. 系统工程与电子技术, 2024, 46(4): 1372-1382.
Tong HE, Qing LU, Jun ZHOU, Zongyi GUO. Line-of-sight angle constraint guidance with neural network interference observer[J]. Systems Engineering and Electronics, 2024, 46(4): 1372-1382.

图1
弹目相对运动关系"


图2
RBF神经网络结构"
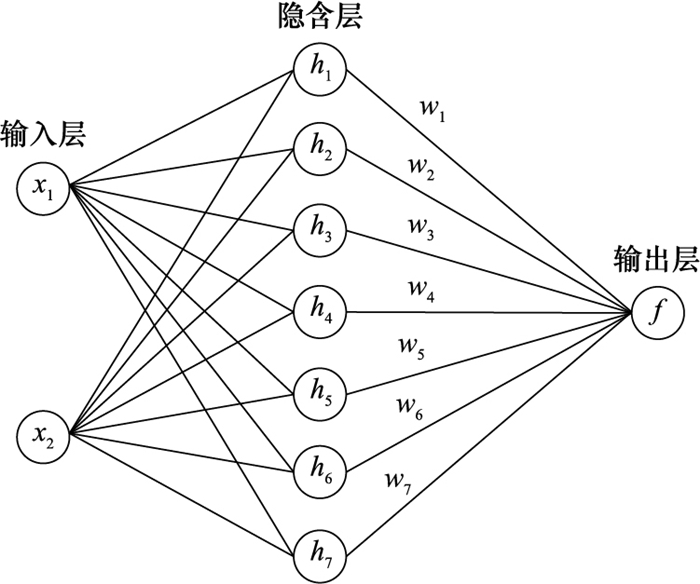

图3
算法流程图"

表1
场景信息"
| 场景编号 | 目标加速度 | 终端角度约束 |
| 1 | atx=0 aty=1.5cos(0.1t)+Δaty atz=1.5cos(0.1t)+Δatz | qεf=20° qβf=-45° |
| 2 | atx=0 aty=1.5cos(0.1t)+Δaty atz=1.5cos(0.1t)+Δatz | qεf=15° qβf=30° |
| 3 | atx=0 aty=0+Δaty atz=0+Δatz | qεf=20° qβf=-45° |
| 4 | atx=0 aty=0+Δaty atz=0+Δatz | qεf=15° qβf=30° |
表2
制导性能"
| 场景编号 | 关键参数 | 方法1 | 方法2 | 方法3 |
| 1 | T/s | 38.848 0 | 34.278 0 | 37.355 0 |
| Δqε/(°) | 0.048 0 | 10.115 3 | 0.002 1 | |
| Δqβ/(°) | 26.809 8 | 32.415 1 | 1.804 8 | |
| 2 | T/s | 37.811 0 | 34.434 0 | 38.901 0 |
| Δqε/(°) | 0.018 3 | 6.087 82 | 0.004 9 | |
| Δqβ/(°) | 23.769 5 | 28.142 6 | 0.134 5 | |
| 3 | T/s | 34.650 0 | 32.323 0 | 36.342 0 |
| Δqε/(°) | 1.021 9 | 10.455 8 | 0.012 5 | |
| Δqβ/(°) | 11.141 6 | 33.160 0 | 1.115 6 | |
| 4 | T/s | 33.686 0 | 32.211 0 | 34.714 0 |
| Δqε/(°) | 0.362 5 | 6.381 86 | 0.011 0 | |
| Δqβ/(°) | 12.480 9 | 28.833 9 | 1.876 5 |

图4
场景1弹目相对运动轨迹"


图5
场景1视线倾角"


图6
场景1视线偏角"


图7
场景1导弹过载"


图8
场景2弹目相对运动轨迹"


图9
场景2视线倾角"


图10
场景2视线偏角"


图11
场景2导弹过载"


图12
场景3弹目相对运动轨迹"


图13
场景3视线倾角"


图14
场景3视线偏角"


图15
场景3导弹过载"

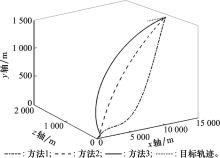
图16
场景4弹目相对运动轨迹"


图17
场景4视线倾角"


图18
场景4视线偏角"


图19
场景4导弹过载"

表3
视线侧向过载跟踪效果"
| 参数 | 方法 | |
| RBF | SMO | |
| Tm/s | 0.611 0 | 3.959 0 |
| err1 | 0.021 3 | 0.022 2 |
表4
视线纵向过载跟踪效果"
| 参数 | 方法 | |
| RBF | SMO | |
| Tn/s | 1.159 0 | 4.097 0 |
| err2 | 0.003 2 | 0.010 1 |

图20
视线倾角"


图21
视线倾角角速率"


图22
视线偏角"


图23
视线偏角角速率"


图24
目标纵向过载"


图25
目标侧向过载"

表5
蒙特卡罗实验结果"
| 参数 | 方法 | ||
| 方法1 | 方法2 | 方法3 | |
| 平均脱靶量/m | 1.302 49 | 1.068 32 | 1.026 01 |
| 平均纵向角误差/(°) | 0.395 95 | 9.140 70 | 0.161 16 |
| 平均侧向角误差/(°) | 20.222 20 | 32.714 50 | 7.592 64 |

图26
蒙特卡罗仿真轨迹"

| 1 | 黄诘, 张友安, 赵育良, 等.基于终端落角和加速度约束的末制导律设计[J].飞行力学,2020,38(3):52-56, 62. |
| HUANG J , ZHANG Y A , ZHAO Y L , et al.Design of terminal guidance law based on terminal impact angle and acceleration constraints[J].Flight Dynamics,2020,38(3):52-56, 62. | |
| 2 |
LYU S , ZHU Z H , TANG S , et al.Prescribed performance slide mode guidance law with terminal line-of-sight angle constraint against maneuvering targets[J].Nonlinear Dynamics,2017,88(3):2101-2110.
doi: 10.1007/s11071-017-3365-9 |
| 3 |
XIONG S F , WANG W , LIU X , et al.Guidance law against maneuvering targets with intercept angle constraint[J].ISA Transactions,2014,53(4):1332-1342.
doi: 10.1016/j.isatra.2014.03.007 |
| 4 | 蔡洪, 胡正东, 曹渊.具有终端角度约束的导引律综述[J].宇航学报,2010,31(2):315-323. |
| CAI H , HU Z D , CAO Y .A survey of guidance law with terminal impact angle constraints[J].Journal of Astronautics,2010,31(2):315-323. | |
| 5 |
KIM M , GRIDER K V .Terminal guidance for impact attitude angle constrained flight trajectories[J].IEEE Trans.on Aerospace and Electronic Systems,1973,AES-9(6):852-859.
doi: 10.1109/TAES.1973.309659 |
| 6 |
KIM B S , LEE J G , HAN H S .Biased PNG law for impact with angular constraint[J].IEEE Trans.on Aerospace and Electronic Systems,1998,34(1):277-288.
doi: 10.1109/7.640285 |
| 7 |
ZHOU D , QU P P , SUN S .A guidance law with terminal impact angle constraint accounting for missile autopilot[J].Journal of Dynamic Systems, Measurement, and Control,2013,135(5):051009.
doi: 10.1115/1.4024202 |
| 8 |
PARK B G , KIM T H , TAHK M J .Range-to-go weighted optimal guidance with impact angle constraint and seeker's look angle limits[J].IEEE Trans.on Aerospace and Electronic Systems,2016,52(3):1241-1256.
doi: 10.1109/TAES.2016.150415 |
| 9 | LEE Y I, RYOO C K, KIM E. Optimal guidance with constraints on impact angle and terminal acceleration[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference and Exhibit, 2003: 5795. |
| 10 | LEE J I, JEON I S, TAHK M J. Guidance law to control impact time and angle[J]//IEEE Trans. on Aerospace and Electronic Systems, 2007, 43(1): 301-310. |
| 11 |
HONG D , KIM M , PARK S .Study on reinforcement learning- based missile guidance law[J].Applied Sciences,2020,10(18):6567.
doi: 10.3390/app10186567 |
| 12 | GAUDET B , FURFARO R , LINARES R .Reinforcement learning for angle-only intercept guidance of maneuvering targets[J].Aerospace Science and Technology,2020,99,1-10. |
| 13 |
GAUDET B , LINARES R , FURFARO R .Adaptive guidance and integrated navigation with reinforcement meta-learning[J].Acta Astronautica,2020,169,180-190.
doi: 10.1016/j.actaastro.2020.01.007 |
| 14 |
LIANG C , WANG W H , LIU Z H , et al.Range-aware impact angle guidance law with deep reinforcement meta-learning[J].IEEE Access,2020,8,152093-152104.
doi: 10.1109/ACCESS.2020.3017480 |
| 15 |
HARL N , BALAKRISHNAN S N .Impact time and angle guidance with sliding mode control[J].IEEE Trans.on Control Systems Technology,2012,20(6):1436-1449.
doi: 10.1109/TCST.2011.2169795 |
| 16 | WANG P Y, GU Y, GUO Y N, et al. Shrinking horizon MPC strategy for impact time and angle guidance[C]//Proc. of the 40th Chinese Control Conference, 2021: 3667-3672. |
| 17 | 赵斌, 梁乐成, 蒋瑞民, 等.终端角度约束制导及制导控制一体化方法综述[J].宇航学报,2022,43(5):563-579. |
| ZHAO B , LIANG L C , JIANG R M , et al.Review of guidance and integrated guidance and control methods under terminal angle constraints[J].Journal of Astronautics,2022,43(5):563-579. | |
| 18 |
SONG J H , SONG S M , ZHOU H B .Adaptive nonsingular fast terminal sliding mode guidance law with impact angle constraints[J].International Journal of Control, Automation and Systems,2016,14(1):99-114.
doi: 10.1007/s12555-014-0155-8 |
| 19 | 张明洋, 晁涛, 杨明.带有攻击角约束的机动目标协同拦截制导律[J].战术导弹技术,2022,(4):78-89. |
| ZHANG M Y , CHAO T , YANG M .Cooperative interception guidance law for maneuvering target with impact angle constraint[J].Tactical Missile Technology,2022,(4):78-89. | |
| 20 | OHNISHI K .A new servo method in mechatronics[J].Japanese Society of Electrical Engineering,1987,177,83-86. |
| 21 |
ZHANG X G , SUN L Z , ZHAO K , et al.Nonlinear speed control for PMSM system using sliding-mode control and disturbance compensation techniques[J].IEEE Trans.on Power Electronics,2013,28(3):1358-1365.
doi: 10.1109/TPEL.2012.2206610 |
| 22 | 宋俊红, 宋申民, 徐胜利.带有攻击角约束的多导弹协同制导律[J].中国惯性技术学报,2016,24(4):554-560. |
| SONG J H , SONG S M , XU S L .Cooperative guidance law for multiple missiles with impact angle constraints[J].Journal of Chinese Inertial Technology,2016,24(4):554-560. | |
| 23 | LIN S Y , CAI Y Z , YANG B , et al.Electrical line-shafting control for motor speed synchronisation using sliding mode controller and disturbance observer[J].IET Control Theory & Applications,2017,11(2):205-212. |
| 24 |
ZHANG X G , HOU B S , MEI Y .Deadbeat predictive current control of permanent-magnet synchronous motors with stator current and disturbance observer[J].IEEE Trans.on Power Electronics,2017,32(5):3818-3834.
doi: 10.1109/TPEL.2016.2592534 |
| 25 |
JIANG Y J , XU W , MU C X , et al.Improved deadbeat predictive current control combined sliding mode strategy for PMSM drive system[J].IEEE Trans.on Vehicular Technology,2018,67(1):251-263.
doi: 10.1109/TVT.2017.2752778 |
| 26 |
WANG B , LUO C , YU Y , et al.Antidisturbance speed control for induction machine drives using high-order fast terminal sliding-mode load torque observer[J].IEEE Trans.on Power Electronics,2018,33(9):7927-7937.
doi: 10.1109/TPEL.2017.2765522 |
| 27 | UTKIN V, SHI J X. Integral sliding mode in systems operating under uncertainty conditions[C]//Proc. of the IEEE 35th Conference on Decision and Control, 1996, 4: 4591-4596. |
| 28 | HUO J H, MENG T, JIN Z H. Adaptive attitude control using neural network observer disturbance compensation technique[C]//Proc. of the IEEE 9th International Conference on Recent Advances in Space Technologies, 2019: 697-701. |
| 29 | 岳晓奎, 吕佰梁, 刘闯, 等.基于神经网络干扰观测器的柔性航天器姿态稳定控制[J].上海航天,2022,39(4):58-65. |
| YUE X K , LYU B L , LIU C , et al.Neural network disturbance observer-based attitude control for flexible spacecrafts[J].Aerospace Shanghai,2022,39(4):58-65. | |
| 30 |
DONG W , WANG C Y , WANG J N , et al.Fixed-time terminal angle-constrained cooperative guidance law against maneuvering target[J].IEEE Trans.on Aerospace and Electronic Systems,2022,58(2):1352-1366.
doi: 10.1109/TAES.2021.3113292 |
| 31 |
YU H , DAI K R , LI H J , et al.Three-dimensional adaptive fixed-time cooperative guidance law with impact time and angle constraints[J].Aerospace Science and Technology,2022,123,107450.
doi: 10.1016/j.ast.2022.107450 |
| 32 |
LIN M , DING X J , WANG C Y , et al.Three-dimensional fixed-time cooperative guidance law with impact angle constraint and prespecified impact time[J].IEEE Access,2021,9,29755-29763.
doi: 10.1109/ACCESS.2021.3057428 |
| 33 | 刘金琨.滑模变结构控制Matlab仿真基本理论与设计方法[M].北京: 清华大学出版社,2022. |
| LIU J K .Sliding mode control design and Matlab simulation the basic theory and design method[M].Beijing: Tsinghua University Press,2022. | |
| 34 |
LEVANT A .Sliding order and sliding accuracy in sliding mode control[J].International Journal of Control,1993,58(6):1247-1263.
doi: 10.1080/00207179308923053 |
| 35 |
LEVANT A .Robust exact differentiation via sliding mode technique[J].Automatica,1998,34(3):379-384.
doi: 10.1016/S0005-1098(97)00209-4 |
| 36 | MORENO J A, OSORIO M. A Lyapunov approach to second-order sliding mode controllers and observers[C]//Proc. of the IEEE 47th Conference on Decision and Control, 2008: 2856-2861. |
| 37 | DAVILA A, MORENO J A, FRIDMAN L. Optimal Lyapunov function selection for reaching time estimation of super twisting algorithm[C]//Proc. of the IEEE 48h Conference on Decision and Control Held Jointly with the 28th Chinese Control Confe-rence, 2009: 8405-8410. |
| [1] | 张普, 薛惠锋, 高山, 左轩. 具有混合执行器故障的多智能体分布式有限时间自适应协同容错控制[J]. 系统工程与电子技术, 2022, 44(4): 1220-1229. |
| [2] | 安通, 王鹏, 王建华, 汤国建, 潘玉龙, 陈海山. 弹性高超声速飞行器动态面制导控制一体化设计方法[J]. 系统工程与电子技术, 2022, 44(3): 956-966. |
| [3] | 唐骁, 叶继坤, 李旭. 三维非线性预设性能制导律设计[J]. 系统工程与电子技术, 2022, 44(2): 619-627. |
| [4] | 李纪强, 张国庆, 黄晨峰, 张卫东. 考虑执行器故障的无人帆船事件触发控制[J]. 系统工程与电子技术, 2022, 44(1): 242-249. |
| [5] | 张跃坤, 贾晓洪, 张晓阳, 王炜强. 基于有限时间收敛干扰观测器的探导控一体化设计[J]. 系统工程与电子技术, 2021, 43(5): 1326-1334. |
| [6] | 鲁力, 王洁, 袁成人, 吴亚晖. 基于反双曲正切函数的跟踪微分器设计与应用[J]. 系统工程与电子技术, 2020, 42(12): 2875-2883. |
| [7] | 蒋瑞民, 周军, 郭建国, 赵斌, 仝云. 基于干扰估计的BTT导弹鲁棒方差姿态控制[J]. 系统工程与电子技术, 2019, 41(9): 2080-2086. |
| [8] | 董蛟, 刘忠, 张建强, 陈霄, 周德超. 基于干扰观测的欠驱动无人艇自适应航迹跟踪控制算法[J]. 系统工程与电子技术, 2019, 41(7): 1606-1616. |
| [9] | 雷虎民, 王业兴, 卜祥伟, 王华吉. 基于干扰观测器的导引头稳定平台滑模控制[J]. 系统工程与电子技术, 2018, 40(9): 2048-2054. |
| [10] | 吕志峰, 张金生, 王仕成, 李婷. 基于RBF神经网络的磁屏蔽性能计算方法[J]. 系统工程与电子技术, 2018, 40(8): 1832-1838. |
| [11] | 王坚浩, 胡剑波, 张亮, 张鹏涛, 宋敏. 基于滑模干扰观测器的反演终端滑模飞行控制[J]. 系统工程与电子技术, 2018, 40(6): 1345-1350. |
| [12] | 吕寿坤, 周荻, 孟克子, 王子才. 视线角约束自适应滑模中制导律[J]. 系统工程与电子技术, 2018, 40(4): 855-859. |
| [13] | 陈诚, 韦常柱, 琚啸哲, 刘鹏云. 基于滑模观测补偿的四旋翼飞行器鲁棒动态逆控制[J]. 系统工程与电子技术, 2018, 40(1): 119-126. |
| [14] | 郭建国, 张添保, 周军, 王国庆. 临近空间高超声速飞行器匹配化滑模姿态控制[J]. 系统工程与电子技术, 2017, 39(9): 2081-2086. |
| [15] | 李飞, 胡剑波, 王坚浩, 汪涛. 一类输入受限的不确定非线性系统自适应Backstepping变结构控制[J]. 系统工程与电子技术, 2017, 39(8): 1823-1833. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||