
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (3): 1021-1030.doi: 10.12305/j.issn.1001-506X.2024.03.28
郝文康, 陈琪锋
收稿日期:2022-12-02
出版日期:2024-02-29
发布日期:2024-03-08
通讯作者:
陈琪锋
作者简介:郝文康(1998—), 男, 硕士研究生, 主要研究方向为无人机集群协同控制Wenkang HAO, Qifeng CHEN
Received:2022-12-02
Online:2024-02-29
Published:2024-03-08
Contact:
Qifeng CHEN
摘要:
针对无人机(unmanned aerial vehicles, UAVs)在编队形成过程中节省能量的问题, 提出一种具有模糊约束的分布式模型预测控制算法。首先, 用模糊数学理论把僚机相对长机的状态误差空间划分成多个模糊集, 根据各僚机的状态误差设计速度和航向角指令的模糊约束; 其次, 把各僚机相对长机的模糊约束作为自身在分布式模型预测控制算法中的约束条件, 以降低速度和航向角的变化幅度, 使UAV在编队控制中节省能量; 最后, 与无模糊约束的分布式模型预测控制算法对比仿真。统计结果表明, 该方法可缩减飞行路程、减小速度与航向角的变化累计值, 起到节省能量的效果。
中图分类号:
郝文康, 陈琪锋. 无人机编队模糊约束分布式模型预测节能控制[J]. 系统工程与电子技术, 2024, 46(3): 1021-1030.
Wenkang HAO, Qifeng CHEN. Distributed model predictive energy-saving control of UAVs formation with fuzzy constraints[J]. Systems Engineering and Electronics, 2024, 46(3): 1021-1030.

图1
编队飞行示意图"


图2
变量的隶属度函数"

表1
航向角指令误差Ψec的模糊规则"
| eΨ | ey | ||||||
| NB | NM | NS | Z | PS | PM | PB | |
| NB | NB | NS | NS | PS | PM | PB | PB |
| NM | NB | NM | NS | PS | PS | PM | PB |
| NS | NB | NM | NS | Z | PS | PM | PB |
| Z | NB | NM | NS | Z | PS | PM | PB |
| PS | NB | NM | NS | Z | PS | PM | PB |
| PM | NB | NM | NS | NS | PS | PM | PB |
| PB | NB | NB | NM | NS | PS | PS | PB |
表2
速度指令误差Vec的模糊规则"
| ev | ex | ||||||
| PB | NB | NM | NS | Z | PS | PM | |
| NB | NB | NM | NM | PS | PB | PB | PB |
| NM | NB | NM | NM | PS | PB | PB | PB |
| NS | NB | NM | NS | Z | PM | PM | PB |
| Z | NB | NM | NS | Z | PS | PM | PB |
| PS | NB | NM | NM | Z | PS | PM | PB |
| PM | NB | NB | NB | NS | PM | PM | PB |
| PB | NB | NB | NB | NS | PM | PM | PB |

图3
航向角指令的模糊约束"

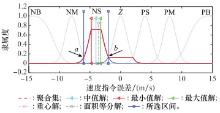
图4
速度指令的模糊约束"

表3
无人机的初始条件"
| 序号 | 位置/m | 速度/(m/s) | 航向角 | 期望位置/m |
| UAV0 | (0, 0) | 35 | π/2 | - |
| UAV1 | (0, 230) | 35 | π/2 | (0, 200) |
| UAV2 | (240, 10) | 35 | π/2 | (190, 61) |
| UAV3 | (-340, 150) | 35 | π/2 | (-190, 61) |
| UAV4 | (40, 180) | 35 | π/2 | (117, -161) |
| UAV5 | (-320, -260) | 35 | π/2 | (-117, -161) |

图5
DMPC算法的飞行轨迹"


图6
具有模糊约束的DMPC算法生成的飞行轨迹"


图7
无人机状态量的变化轨迹"


图8
能量损耗的变化过程"


图9
LHS的样本位置"


图10
两种控制方法计算结果的差值图"

表4
仿真结果统计"
| 指标和对象 | 最小差值 | 最大差值 | 平均差值 | 差值大于0的比例/% | DMPC的标准差 | 模糊约束DMPC的标准差 |
| 飞行路程(编队) | 1.12 | 229.00 | 75.67 | 100 | - | - |
| 角度变化累计值(编队) | 0.07 | 4.20 | 1.38 | 100 | 1.29 | 0.75 |
| 速度变化累计值(编队) | 5.33 | 153.57 | 57.68 | 100 | 33.45 | 18.55 |
| 能量损耗(编队) | 3.7×105 | 2.75×106 | 1.28×106 | 100 | - | - |
| 飞行路程(单机) | -0.75 | 127.74 | 15.13 | 94.64 | - | - |
| 角度变化累计值(单机) | -0.14 | 1.41 | 0.28 | 93.06 | 0.59 | 0.34 |
| 速度变化累计值(单机) | -6.71 | 49.27 | 11.53 | 79.50 | 15.20 | 8.34 |
| 能量损耗(单机) | -42.23 | 9.59×105 | 2.57×105 | 99.80 | - | - |
| 1 | 王祥科, 刘志宏, 丛一睿, 等. 小型固定翼无人机集群综述和未来发展[J]. 航空学报, 2020, 41 (4): 20- 45. |
| WANG X K , LIU Z H , CONG Y R , et al. Miniature fixed wing UAV swarms: review and outlook[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (4): 20- 45. | |
| 2 | 牛轶峰, 刘天晴, 李杰, 等. 密集环境中无人机协同机动飞行运动规划方法综述[J]. 国防科技大学学报, 2022, 44 (4): 1- 12. |
| NIU Y F , LIU T Q , LI J , et al. Review on motion planning methods for unmanned aerial vehicle cooperative maneuvering flight in cluttered environment[J]. Journal of National University of Defense Technology, 2022, 44 (4): 1- 12. | |
| 3 |
ZOU Y , PAGILLA P R , RATLIFF R T . Distributed formation flight control using constraint forces[J]. Journal of Guidance, Control, and Dynamics, 2009, 32 (1): 112- 120.
doi: 10.2514/1.36826 |
| 4 |
CAI Z H , WANG L H , ZHAO J , et al. Virtual target guidance-based distributed model predictive control for formation control of multiple UAVs[J]. Chinese Journal of Aeronautics, 2020, 33 (3): 1037- 1056.
doi: 10.1016/j.cja.2019.07.016 |
| 5 | ZHANG J D, WANG W Y, ZHANG Z, et al. Cooperative control of UAV cluster formation based on distributed consensus[C]//Proc. of the IEEE 15th International Conference on Control and Automation, 2019: 788-793. |
| 6 |
KADA B , KHALID M , SHAIKH M S . Distributed cooperative control of autonomous multi-agent UAV systems using smooth control[J]. Journal of Systems Engineering and Electronics, 2020, 31 (6): 1297- 1307.
doi: 10.23919/JSEE.2020.000100 |
| 7 |
SATTIGERI R , CALISE A J , EVERS J H . An adaptive vision-based approach to decentralized formation control[J]. Journal of Aerospace Computing, Information, and Communication, 2004, 1 (12): 502- 525.
doi: 10.2514/1.12925 |
| 8 | GALZI D, SHTESSEL Y. UAV formations control using high order sliding modes[C]//Proc. of the IEEE American Control Conference, 2006: 1025-1032. |
| 9 | ROJO-RODRIGUEZ E G, OLLERVIDES E J, ZAMBRANO-ROBLEDO P, et al. A fuzzy gain scheduling control algorithm for formation flight of multi-UAVs[C]//Proc. of the IEEE International Conference on Unmanned Aircraft Systems, 2019: 712-720. |
| 10 | ZHOU C, LEI M, ZHOU S L, et al. Collision-free UAV formation flight control based on nonlinear MPC[C]//Proc. of the IEEE International Conference on Electronics, Communications and Control, 2011: 1951-1956. |
| 11 | 赵超轮, 戴邵武, 赵国荣, 等. 基于分布式模型预测控制的无人机编队控制[J]. 控制与决策, 2022, 37 (7): 1763- 1771. |
| ZHAO C L , DAI S W , ZHAO G R , et al. Formation control of multi-UAV based on distributed model predictive control algorithm[J]. Control and Decision, 2022, 37 (7): 1763- 1771. | |
| 12 |
DUNBAR W B , MURRAY R M . Distributed receding horizon control for multi-vehicle formation stabilization[J]. Automatica, 2006, 42 (4): 549- 558.
doi: 10.1016/j.automatica.2005.12.008 |
| 13 |
CAMPONOGARA E , JIA D , KROGH B H , et al. Distributed model predictive control[J]. IEEE Control Systems Magazine, 2002, 22 (1): 44- 52.
doi: 10.1109/37.980246 |
| 14 |
ZHANG B Y , SUN X X , LIU S G , et al. Adaptive differential evolution-based distributed model predictive control for multi-UAV formation flight[J]. International Journal of Aeronautical and Space Sciences, 2020, 21 (2): 538- 548.
doi: 10.1007/s42405-019-00228-8 |
| 15 |
WEI S B , CHAI Y , DING B C . Distributed model predictive control for multiagent systems with improved consistency[J]. Journal of Control Theory and Applications, 2010, 8 (1): 117- 122.
doi: 10.1007/s11768-010-9181-0 |
| 16 | ZHOU S L, KANG Y H, ZHOU C, et al. Research on MPC formation control algorithm based on centralized-distributed information interactive strategy[C]//Proc. of the IEEE Chinese Guidance, Navigation and Control Conference, 2016: 324-331. |
| 17 |
HU X X , LIU Y H , WANG G D . Optimal search for moving targets with sensing capabilities using multiple UAVs[J]. Journal of Systems Engineering and Electronics, 2017, 28 (3): 526- 535.
doi: 10.21629/JSEE.2017.03.12 |
| 18 |
GRAFE A , EICKHOFF J , TRIMPE S . Event-triggered and distributed model predictive control for guaranteed collision avoidance in UAV swarms[J]. IFAC-PapersOnLine, 2022, 55 (13): 79- 84.
doi: 10.1016/j.ifacol.2022.07.239 |
| 19 | 孙田野, 孙伟, 吴建军. 改进Quatre算法的无人机编队快速集结方法[J]. 系统工程与电子技术, 2022, 44 (9): 2840- 2848. |
| SUN T Y , SUN W , WU J J . UAV formation rapid assembly method based on improved Quatre algorithm[J]. Systems Engineering and Electronics, 2022, 44 (9): 2840- 2848. | |
| 20 |
CHEN J X , LI J M , YUAN X X . Global fuzzy adaptive consensus control of unknown nonlinear multiagent systems[J]. IEEE Trans.on Fuzzy Systems, 2020, 28 (3): 510- 522.
doi: 10.1109/TFUZZ.2019.2908771 |
| 21 | ROJO-RODRIGUEZ E G, OLLERVIDES E J, ZAMBRANO-ROBLEDO P, et al. A fuzzy gain scheduling control algorithm for formation flight of multi-UAVs[C]//Proc. of the IEEE International Conference on Unmanned Aircraft Systems, 2019: 712-720. |
| 22 | REZAEE H, ABDOLLAHI F, MENHAJ M B. Model-free fuzzy leader-follower formation control of fixed wing UAVs[C]//Proc. of the IEEE 13th Iranian Conference on Fuzzy Systems, 2013. |
| 23 | XU B, JIAO M Y, ZHANG D L. Design of close formation controller for UAVs based on fuzzy PID rule[C]//Proc. of the IEEE Chinese Automation Congress, 2020: 444-449. |
| 24 |
TRAN V P , SANTOSO F , GARRATT M A , et al. Distributed formation control using fuzzy self-tuning of strictly negative imaginary consensus controllers in aerial robotics[J]. IEEE-ASME Trans.on Mechatronics, 2021, 26 (5): 2306- 2315.
doi: 10.1109/TMECH.2020.3036829 |
| 25 | 魏英杰, 毕凤阳, 张嘉钟, 等. 时滞时变AUV的模糊变结构控制[J]. 系统工程与电子技术, 2009, 31 (8): 1949-1952, 2023. |
| WEI Y J , BI F Y , ZHANG J Z , et al. Fuzzy sliding mode controller for time-delay and time-varying autonomous underwater vehicles[J]. Journal of Systems Engineering and Electronics, 2009, 31 (8): 1949-1952, 2023. | |
| 26 | 吴正平, 邓聪, 文海. 模糊线性/非线性自抗扰切换控制及其应用[J]. 航空学报, 2021, 42 (9): 473- 480. |
| WU Z P , DENG C , WEN H . Fuzzy linear/nonlinear active disturbance rejection switching control and its application[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42 (9): 473- 480. | |
| 27 | MACIEJONSKI J . Predictive control with constraints[M]. New Jersey: Prentice Hall, 1999. |
| 28 | RAWLINGS J B , MAYNE D Q , DIEHL M . Model predictive control: theory, computation, and design[M]. 2nd ed. San Francisco: Nob Hill Publishing, 2020. |
| 29 | BEARD R W , MCLAIN T W . Small unmanned aircraft: theory and practice[M]. Princeton and Oxford: Princeton University Press, 2012: 164- 165. |
| 30 |
YAN H , CHEN Y , YANG S H . New energy consumption model for rotary-wing UAV propulsion[J]. IEEE Wireless Communications Letters, 2021, 10 (9): 2009- 2012.
doi: 10.1109/LWC.2021.3090772 |
| [1] | 刘涛, 王沙沙, 张驰, 白光晗, 陶俊勇. 考虑韧性的无人机集群自组织区域覆盖方法[J]. 系统工程与电子技术, 2024, 46(3): 942-952. |
| [2] | 覃润楠, 彭晓东, 谢文明, 惠建江, 冯渭春, 姜加红. 面向航天器大数据安全传输的发布/订阅系统设计[J]. 系统工程与电子技术, 2024, 46(3): 963-971. |
| [3] | 胡树欣, 张安, 孙嫚憶, 李铭浩. 基于一致性理论和S-MPC的四旋翼编队协同避障[J]. 系统工程与电子技术, 2024, 46(2): 658-667. |
| [4] | 朱宇昂, 赵亚丽, 赫佳峦, 张晨光, 吴朝军, 贾晓晓. 基于分布式SDN的机动通信系统拓扑发现方法[J]. 系统工程与电子技术, 2024, 46(1): 357-365. |
| [5] | 张宏, 吴云华, 钟胜钧, 郭海波. 基于反步法的空间目标复合指向控制方法研究[J]. 系统工程与电子技术, 2023, 45(9): 2884-2893. |
| [6] | 徐文丰, 李颖晖, 裴彬彬, 禹志龙. 基于多模型MPC的变体飞机协调优化控制[J]. 系统工程与电子技术, 2023, 45(9): 2902-2911. |
| [7] | 刘文波, 姚翼荣, 张弓, 胡文. 超维计算概念、应用及研究进展[J]. 系统工程与电子技术, 2023, 45(7): 1938-1956. |
| [8] | 郝宇航, 蒋威, 王增福, 兰华, 雍婷, 潘泉. 分布式MIMO体制天波超视距雷达仿真系统[J]. 系统工程与电子技术, 2023, 45(7): 1981-1989. |
| [9] | 钱寒雨, 田晓曼, 肖冰, 曹璐, 王锐, 吴西伟. 分布式卫星集群博弈任务均衡分配方法[J]. 系统工程与电子技术, 2023, 45(6): 1797-1804. |
| [10] | 宋超, 李波, 马云红, 黄晶益. 基于优化A*和MPC融合算法的三维无人机航迹规划[J]. 系统工程与电子技术, 2023, 45(12): 3995-4004. |
| [11] | 柳子然, 戴梓健, 岳程斐, 王培基, 曹喜滨. 基于高斯混合过程的空间机器人任务空间预测控制方法[J]. 系统工程与电子技术, 2023, 45(11): 3597-3605. |
| [12] | 王宏安, 黄达, 张伟, 潘晔, 王祥丰, 邵怀宗, 顾杰. 基于DSGD的分布式电磁目标识别[J]. 系统工程与电子技术, 2023, 45(10): 3024-3031. |
| [13] | 孙田野, 孙伟, 吴建军. 改进Quatre算法的无人机编队快速集结方法[J]. 系统工程与电子技术, 2022, 44(9): 2840-2848. |
| [14] | 胡泰洋, 张晋宇, 卢海梁, 李鹏飞, 李一楠, 吕容川. 基于数据融合的分布式综合孔径微波辐射高分辨率成像算法[J]. 系统工程与电子技术, 2022, 44(8): 2403-2409. |
| [15] | 孙林, 毛忠阳, 康家方, 张磊. 基于最大化能效的海上中继通信频谱分配算法[J]. 系统工程与电子技术, 2022, 44(8): 2661-2667. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||