
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (2): 570-585.doi: 10.12305/j.issn.1001-506X.2024.02.21
• 系统工程 • 上一篇
赵蕊蕊, 于海跃, 游雅倩, 张涛, 陶敏, 姜江
收稿日期:2022-03-24
出版日期:2024-01-25
发布日期:2024-02-06
通讯作者:
于海跃
作者简介:赵蕊蕊(1999—), 女, 硕士研究生, 主要研究方向为计算智能与优化决策Ruirui ZHAO, Haiyue YU, Yaqian YOU, Tao ZHANG, Min TAO, Jiang JIANG
Received:2022-03-24
Online:2024-01-25
Published:2024-02-06
Contact:
Haiyue YU
摘要:
试验评估是促进装备系统作战能力生成和实战化应用的重要手段。无人集群依靠自组网实现复杂交互, 具备典型的智能性和涌现性, 开展无人集群试验评估研究面临着指标不清、标准模糊、技术方法落后等难题。为了进一步推动无人集群试验评估理论研究, 对国内外已开展的无人集群试验评估相关规划和项目实践现状进行了概述。面向评估指标设计和评估方法研究两个试验评估关键环节, 首先对已有无人集群评估文献中使用的指标进行了分类梳理, 并分析了现有研究在指标选取和构建方面的特点与不足; 然后, 结合不同无人集群关键技术研究中涉及的评价指标, 提出了面向无人集群关键技术能力的评估指标设计思路。在此基础上, 根据具体含义及计算方式, 将已有指标划分为基础指标和综合指标2类, 分类介绍了可用的评估方法, 期望为后续无人集群试验评估的指标构建和评估方法选取工作提供一定借鉴。
中图分类号:
赵蕊蕊, 于海跃, 游雅倩, 张涛, 陶敏, 姜江. 无人集群试验评估现状及技术方法综述[J]. 系统工程与电子技术, 2024, 46(2): 570-585.
Ruirui ZHAO, Haiyue YU, Yaqian YOU, Tao ZHANG, Min TAO, Jiang JIANG. Review on current status and technology method of unmanned swarm test evaluation[J]. Systems Engineering and Electronics, 2024, 46(2): 570-585.
表1
国外无人集群试验评估项目实践汇总"
| 国家 | 项目名称 | 时间/年份 | 主要研究内容梳理 |
| 美国 | 灰山鹑项目[ | 2011 | 超微型、协同自主的无人集群相关技术; 监视侦察、赛博攻击、电子干扰等任务 |
| 美国 | 体系综合技术和试验[ | 2014 | 无人装备及无人集群新技术的系统集成; 多平台整体作战效能的提升 |
| 美国 | 拒止环境中协同作战项目[ | 2014~2020 | 集侦察、监视与打击于一体的无人机集群; 复杂或高强度干扰环境; 飞行和大规模自主试验 |
| 美国 | 班组X试验[ | 2014至今 | 无人机、无人车、先进传感器和机器学习等新技术 |
| 美国 | 快速轻型自主性项目[ | 2015~2018 | 自主算法; 室内、地下或人为干扰等无法使用全球定位系统的环境 |
| 美国 | 小精灵项目[ | 2015~2018 | 分布式空战、可回收等集群技术; 情报侦察、电子攻击或空间定位任务 |
| 美国 | 低成本无人机集群技术[ | 2016 | 快速释放大量小型无人机; 自适应组网和自主协同; 空中监视、护航、饱和攻击等任务 |
| 美国 | 忠实僚机项目[ | 2016 | 改装F-16战机为具有一定自主能力的无人驾驶飞机, 搭配F-35有人机形成长机-多僚机编队 |
| 美国 | 无人集群试验[ | 2016 | 4艇协同对海目标自主察打跟踪试验; 美国成为首个实现水面无人艇集群自主作战的国家 |
| 美国 | 微小水下探索者集群[ | 2017 | 模仿海洋浮游生物行为; 海底三维空间; 采集温度信息 |
| 美国 | 近战隐蔽自主一次性无人机项目[ | 2017 | 低成本一次性微型无人机; 区域内气象资料收集、核生化区域检查、侦察、情报搜集等任务 |
| 美国 | 进攻性蜂群使能战术[ | 2016~2020 | 小型无人机集群与地面机器人和地面部队的配合; 复杂城市环境; 防御、火力、精确打击效果及情报侦察能力 |
| 美国 | 水下微小无人机集群[ | 2018 | 海洋环境监控、羽流跟踪、三维数据网络收集、自主声探等; 已成功应用于协助海军搜寻 |
| 欧洲 | 多异构无人机实时协同和控制项目[ | — | 多异构无人机组成的协同探测和监视系统; 分布式控制结构; 分布式信息感知和实时图像处理技术集成 |
| 欧洲 | 面向安全无线的高移动性协同工业系统的估计与控制项目[ | 2011 | 高动态固定翼和旋翼无人机; 预测和协同控制技术; 多机自动感知、规避与精确着陆问题 |
| 欧洲 | 集体认知机器人[ | 2015 | 41个水下机器人组成的集群; 当时全球数量最多 |
| 英国 | 无人集群试验[ | 2020 | 即插即用开放式架构和智能互联技术; 20架固定翼无人机、异构无人机蜂群; 超视距飞行等技术验证 |
| 印度 | 无人集群概念项目[ | 2019 | 战斗机发射大量察打一体无人机; 对地防空打击任务 |
表2
国内无人集群试验评估项目实践汇总"
| 项目 | 时间 | 主要研究内容梳理 |
| 集群式箱式发射折叠翼无人机系统[ | 2016 | 先进的小型无人机集群作战系统 |
| 集群飞行试验[ | 2016~2017 | 67架、119架、200架固定翼无人机集群飞行; 编队弹射起飞、空中集结多目标分组、编队合围等动作 |
| 集群技术研究及试验[ | 2018 | 20架无人机组成的无人机集群自主协同飞行试验; 自适应分布体系架构、任务规划、并行感知等关键技术 |
| 集群技术研究及试验[ | 2018 | 基于狼群行为机制的无人机协同任务分配飞行试验; 目标分配、目标跟踪、集群围捕等技术 |
| 集群跨域协同试飞试验[ | 2020 | 陆空协同固定翼无人机蜂群系统相关试飞试验; 对地察打、精确打击等任务能力 |
| 无人艇协同试验[ | 2018 | 4艘水面无人艇组网; 协同勘探、巡逻缉私、污染清理等试验 |
| 无人艇协同演练[ | 2018 | 世界最大规模(56艘)水面无人艇群协同演练; 快速集结、队形保持、动态任务分配、队形自主变换、协同避障及容错控制等多项测试科目 |
| 水下航行器研发[ | 1992~2019 | “探索者”“CR01”“CR02”“潜龙一号”“潜龙二号”一系列航行器 |
| 小型自主水下航行器研发[ | “十二五” | 300 kg级自主水下航行器; 海域110 km的自主航行和自主布防等功能, 潜深可达1 000 m |

图1
无人集群评估研究关注内容"

表3
无人集群综合评估指标体系梳理"
| 性能 | 评估内容 | 评估指标 |
| 感知 | 侦察能力 | 侦察范围/侦察覆盖率/集群部署熵[ |
| 目标发现能力、目标识别能力、目标定位能力、目标跟踪能力[ | ||
| 态势感知能力 | 雷达探测能力、光电探测能力、电子侦察能力、信息融合能力[ | |
| 完备性-区域覆盖率/目标数量完备性; 准确性-航迹真伪性(虚假航迹/冗余航迹)/目标离散属性(目标类型/种类/敌我属性)/目标连续属性(目标位置/速度/航向角), 连续性-航迹批号改变率/最长航迹段比例, 时效性-信息获取延时, 相关性, 共享度[ | ||
| 分析 | 目标检测算法 | AUC*、计算时间、环境背景、目标大小、摄像视角、光照及遮挡条件[ |
| 决策 | 指挥控制能力 | 指挥控制效率/系统生存能力[ |
| 判断决策能力 | 目标识别能力、目标分配能力、航路规划能力[ | |
| 系统编配方式 | 参战人员编制, 任务机/中继机/机载任务设备数量, 指挥控制车/机动测控车/地面数据终端/机载无线电设备数量[ | |
| 行动 | 协同能力 | 协同时间、协同信息量[ |
| 编队集结能力 | 快速性-最小集结时间/协调一致时间, 准确性-末端位置误差/末端姿态误差/末端速度误差/航迹匹配表, 稳定性-平均故障处理时间/平均无故障时间/可靠性指数, 安全性-探测半径/防撞时间代价/地面撞击安全水平[ | |
| 组队能力 | 飞行性能、战术编队、飞机可用度、生存力[ | |
| 生存能力 | 被雷达发现概率, 机动性(最小转弯半径)/隐身性(电子对抗能力), 基本性能(实用升限、航程、巡航速度、载荷能力)[ | |
| 攻击能力 | 火力对抗能力、规避机动性、电子对抗能力[ | |
| 整体作战能力 | 作战环数量、信息熵[ | |
| 协同作战效能 | 防御成功率, 侦察/攻击/诱饵无人机存活率、目标摧毁率[ | |
| 通信能力 | 数据传输速率、传输延迟时间、误码率、丢包率、延迟违反概率、端与端距离[ |

图2
任务分配约束条件涉及指标"

表4
无人集群任务分配能力评估指标"
| 能力 | 评估内容 | 评估指标 |
| 任务分配能力 | 自身性能 | 作战高度、作战半径、航程、通信距离、侧向加速度、载荷能力 |
| 集群资源 | 武器资源、油量 | |
| 算法性能 | 计算时间、迭代次数、任务完成时间、任务分配收益/目标价值收益/目标覆盖数量、航程代价 |

图3
路径规划约束条件涉及指标"

表5
无人集群路径规划能力评估指标"
| 能力 | 评估内容 | 评估指标 |
| 路径规划能力 | 集群自身性能 | 航程、安全距离、飞行速度、飞行高度、转弯角、俯冲角、爬升角 |
| 任务环境 | 障碍威胁程度、飞行边界、地形边界 | |
| 算法性能 | 计算时间、迭代次数、航行时间、路径长度、任务完成时间、整体工作效益/任务完成数量、路径重合度、结果稳定性 |
表6
无人集群编队控制能力评估指标"
| 能力 | 评估指标 |
| 编队控制能力 | 覆盖面积、编队位置误差、编队速度误差、编队姿态误差、队形形成耗时、队形结构差异度、队形变换路径代价、编队轨迹误差、编队连通性、结果稳定性 |

图4
无人集群组网通信能力评价指标"


图5
基础指标评估方法"
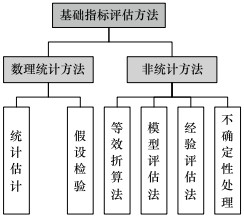

图6
综合指标评估方法"
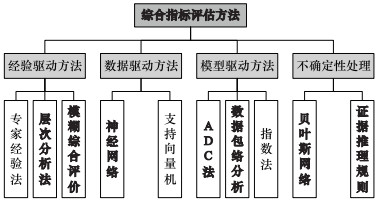
表7
常用评估方法总结"
| 评估方法 | 方法特点 | 数据 | 适用情景 | 已有应用 |
| AHP | 建立层次结构, 定量与定性分析结合 | 定性 定量 | 确定指标权重; 不同方案的对比评价 | 作战能力评估[ |
| 模糊综合评价法 | 结果清晰, 能较好地解决模糊的、难以量化的问题 | 定性 | 多准则评价; 多方案寻优 | 基于鲁棒性评估的决策[ |
| 神经网络 | 具有自主学习与调整能力, 客观性强 | 定量 | 图像特征对比; 数据量大且输入输出已知 | 作战效能评估[ |
| ADC法 | 考虑问题全面, 数学模型严谨 | 定量 | 评估在规定条件下满足特定任务要求的程度 | 作战效能评估[ |
| DEA法 | 客观性强 | 定量 | 多输入多输出的评估与排序 | 系统编配方案评估[ |
| 贝叶斯网络 | 可以处理不确定信息, 推理能力强且速度快, 理论基础扎实 | 定性 定量 | 分析评估目标的优劣及各因素的影响程度; 动态变化场景 | 作战效能评估[ |
| 证据推理规则 | 可以融合专家经验, 处理各类不确定信息 | 定性 定量 | 数据类型多样、存在不确定性; 多源数据或多时间点数据融合 | 作战能力评估[ |
| 96 | 李朋月, 刘松林, 郝向阳, 等. 无人机编队控制技术研究[J]. 电子测量技术, 2019, 42 (12): 106- 112. |
| LI P Y , LIU S L , HAO X Y , et al. Research on formation control technology of UAVs[J]. Electronic Measurement Technology, 2019, 42 (12): 106- 112. | |
| 97 |
ZHANG J L , YAN J G , ZHANG P . Fixed-wing UAV formation control design with collision avoidance based on an improved artificial potential field[J]. IEEE Access, 2018, 6, 78342- 78351.
doi: 10.1109/ACCESS.2018.2885003 |
| 98 |
WANG D S , FU M Y , GE S S , et al. Velocity free platoon formation control for unmanned surface vehicles with output constraints and model uncertainties[J]. Applied Sciences, 2020, 10 (3): 1118.
doi: 10.3390/app10031118 |
| 99 |
FU X W , PAN J , WANG H X , et al. A formation maintenance and reconstruction method of UAV swarm based on distributed control[J]. Aerospace Science and Technology, 2020, 104, 105981.
doi: 10.1016/j.ast.2020.105981 |
| 100 |
WANG J H , HAN L , LI X D , et al. Time-varying formation of second-order discrete-time multi-agent systems under non-uniform communication delays and switching topology with application to UAV formation flying[J]. IET Control Theory and Applications, 2020, 14 (14): 1947- 1956.
doi: 10.1049/iet-cta.2020.0183 |
| 101 |
LIU H , WANG Y H , LEWIS F L . Robust distributed formation controller design for a group of unmanned underwater vehicles[J]. IEEE Trans.on Systems Man Cybernetics-Systems, 2021, 51 (2): 1215- 1223.
doi: 10.1109/TSMC.2019.2895499 |
| 102 | PARK B S , YOO S J . Connectivity-maintaining and collision-avoiding performance function approach for robust leader-follower formation control of multiple uncertain underactuated surface vessels[J]. Automatica, 2021, 127 (9): 109501. |
| 103 | HENTATI A I , FOURATI L C . Comprehensive survey of UAVs communication networks[J]. Computer Standards & Interfaces, 2020, 72, 103451. |
| 104 |
SANG Q Q , WU H H , XING L , et al. Review and comparison of emerging routing protocols in flying ad hoc networks[J]. Symmetry, 2020, 12 (6): 971.
doi: 10.3390/sym12060971 |
| 105 | GUPTA L , JAIN R , VASZKUN G . Survey of important issues in UAV communication networks[J]. IEEE Communications Surveys & Tutorials, 2016, 18 (2): 1123- 1152. |
| 106 |
ZHANG P T , WU T , CAO R H , et al. UAV swarm resilience assessment considering load balancing[J]. Frontiers in Physics, 2022, 10, 821321.
doi: 10.3389/fphy.2022.821321 |
| 107 | 李艳军. 基于信息交互的无人机集群建模与韧性评估[D]. 长沙: 国防科技大学, 2018. |
| LI Y J. Resilience of UAV swarm based on information exchange: models and evaluation methods[D]. Changsha: National University of Defense Technology, 2018. | |
| 108 | 顾凌枫, 何明, 陈国友, 等. 无人机集群系统弹性研究[J]. 系统工程与电子技术, 2021, 43 (1): 156- 162. |
| GU L F , HE M , CHEN G Y , et al. Research on unmanned aerial vehicle swarm system resilience[J]. Systems Engineering and Electronics, 2021, 43 (1): 156- 162. | |
| 109 |
CHENG C C , BAI G H , ZHANG Y A , et al. Resilience eva-luation for UAV swarm performing joint reconnaissance mi-ssion[J]. Chaos, 2019, 29 (5): 053132.
doi: 10.1063/1.5086222 |
| 110 |
BAI G H , LI Y J , FANG Y N , et al. Network approach for resilience evaluation of a UAV swarm by considering communication limits[J]. Reliability Engineering and System Safety, 2020, 193, 106602.
doi: 10.1016/j.ress.2019.106602 |
| 111 |
WANG X H , ZHANG Y , WANG L Z , et al. Robustness evaluation method for unmanned aerial vehicle swarms based on complex network theory[J]. Chinese Journal of Aeronautics, 2020, 33 (1): 352- 364.
doi: 10.1016/j.cja.2019.04.025 |
| 112 | XU S F, XU D Z, HUANG Q, et al. An opportunistic routing with improved node forwarding mechanism[C]//Proc. of IEEE International Conference on Information & Automation, 2015: 1718-1722. |
| 113 |
AZARI M M , GERACI G , GARCIA-RODRIGUEZ A , et al. UAV-to-UAV communications in cellular networks[J]. IEEE Trans.on Wireless Communications, 2020, 19 (9): 6130- 6144.
doi: 10.1109/TWC.2020.3000303 |
| 114 | TAN X P , ZUO Z , SU S J , et al. Performance analysis of routing protocols for UAV communication networks[J]. IEEE Access, 2020, 8, 92212- 92224. |
| 115 | 代耀宗, 沈建京, 郭晓峰. 作战效能评估方法研究[J]. 国防科技, 2017, 38 (5): 104- 109. |
| DAI Y Z , SHEN J J , GUO X F . Review of combat effectiveness evaluation methods[J]. National Defense Science & Technology, 2017, 38 (5): 104- 109. | |
| 1 | 梁晓龙, 侯岳奇, 胡利平, 等. 无人集群试验评估研究现状分析及理论方法[J]. 南京航空航天大学学报, 2020, 52 (6): 846- 854. |
| LIANG X L , HOU Y Q , HU L P , et al. Review on evaluation and theoretical methods of unmanned swarm test[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2020, 52 (6): 846- 854. | |
| 2 | 蒋平, 程志君, 王博, 等. 无人集群作战试验设计框架初探[J]. 航空兵器, 2020, 27 (6): 30- 35. |
| JIANG P , CHENG Z J , WANG B , et al. Preliminary study on design framework of unmanned swarm operational tests[J]. Aero Weaponry, 2020, 27 (6): 30- 35. | |
| 3 |
王璨, 高辰子. 无人机集群通信网络拓扑重构及关键技术研究[J]. 舰船电子工程, 2021, 41 (5): 49-52, 82.
doi: 10.3969/j.issn.1672-9730.2021.05.012 |
|
WANG C , GAO C Z . Research on communication networks topology reconstruction and key technologies of UAV swarm[J]. Ship Electronic Engineering, 2021, 41 (5): 49-52, 82.
doi: 10.3969/j.issn.1672-9730.2021.05.012 |
|
| 4 | 李欢. 无人机集群作战: 未来信息化战争常态模式[EB/OL]. [2022-03-12]. https://www.sohu.com/a/233005850_358040. |
| LI H. UAV swarm operation: the normal mode of future IT-based warfare[EB/OL]. [2022-03-12]. https://www.sohu.com/a/233005850_358040. | |
| 5 | 谢伟, 陶浩, 龚俊斌, 等. 海上无人系统集群发展现状及关键技术研究进展[J]. 中国舰船研究, 2021, 16 (1): 7-17, 31. |
| XIE W , TAO H , GONG J B , et al. Research advances in the development status and key technology of unmanned marine vehicle swarm operation[J]. Chinese Journal of Ship Research, 2021, 16 (1): 7-17, 31. | |
| 6 | 唐强, 张宁, 李浩, 等. 无人机自主控制系统简述[J]. 测控技术, 2020, 39 (10): 114- 123. |
| TANG Q , ZHANG N , LI H , et al. Brief review of UAV auto-nomous control system[J]. Measurement & Control Technology, 2020, 39 (10): 114- 123. | |
| 7 | 陈杰, 辛斌. 有人/无人系统自主协同的关键科学问题[J]. 中国科学: 信息科学, 2018, 48 (9): 1270- 1274. |
| CHEN J , XIN B . Key scientific problems in the autonomous coope-ration of manned-unmanned systems[J]. Scientia Sinica (Informationis), 2018, 48 (9): 1270- 1274. | |
| 8 | 陈宏建. 基于贝叶斯网络的无人机编队作战效能评估方法研究[D]. 南京: 南京邮电大学, 2020. |
| CHEN H J. Research on combat effectiveness evaluation method of UAV formation based on Bayesian network[D]. Nanjing: Nanjing University of Posts and Telecommunications, 2020. | |
| 9 | CAMBONE S. Unmanned aircraft systems roadmap 2005-2030[R]. Washington, DC: United States Department of Defense, 2005. |
| 10 | U.S. army UAS center of excellence. U.S. army roadmap for UAS 2010-2035[EB/OL]. [2022-03-12]. https://rosap.ntl.bts.gov/view/dot/18249. |
| 11 | ROBERT O. Small unmanned aircraft systems (SUAS) flight plan: 2016-2036[R]. Washington, DC: United States Air Force, 2016. |
| 12 | 段海滨, 邱华鑫, 陈琳, 等. 无人机自主集群技术研究展望[J]. 科技导报, 2018, 36 (21): 90- 98. |
| DUAN H B , QIU H X , CHEN L , et al. Prospects on unmanned aerial vehicle autonomous swarm technology[J]. Science & Technology Review, 2018, 36 (21): 90- 98. | |
| 13 | FACHEY K M, MILLER M J. Unmanned systems integrated roadmap 2017-2042[R]. Arlington County: Office of the Secretary of Defense, 2018. |
| 14 | Defense Advanced Research Projects Agency. Strategic techno-logy office outlines vision for mosaic warfare[EB/OL]. [2022-03-20]. https://www.darpa.mil/news-events/2017-08-04. |
| 15 | Center for Strategic and Budgetary Assessments. Mosaic warfare: exploiting artificial intelligence and autonomous systems to implement decision-centric operations[EB/OL]. [2022-03-20]. https://csbaonline.org/research/publications/mosaic-warfare-exploiting-artificial-intelligence-and-autonomous-systems-to-implement-decision-centric-operations. |
| 16 | 国务院. 新一代人工智能发展规划[EB/OL]. [2022-03-20]. http://www.gov.cn/gongbao/content/2017/content_5216427.htm. |
| The State Council, PRC. Development planning new generation artificial intelligence[EB/OL]. [2022-03-20]. http://www.gov.cn/gongbao/content/2017/content_5216427.htm. | |
| 17 | 李明海. 加速推进军事智能化[EB/OL]. [2022-03-20]. http://www.mod.gov.cn/jmsd/2019-10/08/content_4852384.htm. |
| LI M H. Accelerate military intelligence[EB/OL]. [2022-03-20]. http://www.mod.gov.cn/jmsd/2019-10/08/content_4852384.htm. | |
| 18 | 中国科学院大数据挖掘与知识管理重点实验室. 2019年人工智能发展白皮书[EB/OL]. [2022-03-23]. https://bdk.ucas.ac.cn/index.php/xyxw/2780-20190113. |
| Key Laboratory of Big Data Mining and Knowledge Management, Chinese Academy of Science. 2019 white paper on artificial intelligence development[EB/OL]. [2022-01-23]. https://bdk.ucas.ac.cn/index.php/xyxw/2780-20190113. | |
| 19 | 中国电子技术标准化研究院. 智能无人集群系统发展白皮书[EB/OL]. [2022-03-23]. http://jl.cesi.cn/images/editor/20211110/20211110104005854.pdf. |
| China Electronics Standardization Institute. White paper on the development of intelligent unmanned swarm system[EB/OL]. [2022-03-23]. http://jl.cesi.cn/images/editor/20211110/20211110104005854.pdf. | |
| 20 | 周宇, 杨俊岭. 美军无人自主系统试验鉴定挑战、做法及启示[EB/OL]. [2022-03-20]. https://news.qq.com/a/20170327/019952.htm. |
| ZHOU Y, YANG J L. Challenges, practices and enlightenment of test and identification of U.S. army unmanned autonomous system[EB/OL]. [2022-03-20]. https://news.qq.com/a/20170327/019952.htm. | |
| 21 |
韩光松, 王忠, 李萍. 无人机集群反舰作战与反集群对策研究[J]. 舰船电子工程, 2018, 38 (6): 1-4, 49.
doi: 10.3969/j.issn.1672-9730.2018.06.001 |
| 116 | 杨克巍, 杨志伟, 谭跃进, 等. 面向体系贡献率的装备体系评估方法研究综述[J]. 系统工程与电子技术, 2019, 41 (2): 311- 321. |
| YANG K W , YANG Z W , TAN Y J , et al. Review of the evaluation methods of equipment system of systems facing the contribution rate[J]. Systems Engineering and Electronics, 2019, 41 (2): 311- 321. | |
| 117 | WANG X H, ZHANG Y, WANG L Z, et al. Task decision-making for UAV swarms based on robustness evaluation[C]//Proc. of the 19th International Conference on Software Quality, Reliability and Security Companion, 2019: 242-248. |
| 118 |
YANG J B , XU D L . Evidential reasoning rule for evidence combination[J]. Artificial Intelligence, 2013, 205, 1- 29.
doi: 10.1016/j.artint.2013.09.003 |
| 21 |
HAN G S , WANG Z , LI P . Anti-ship combat of unmanned aerial vehicle swarm and anti-swarm strategies[J]. Ship Electronic Engineering, 2018, 38 (6): 1-4, 49.
doi: 10.3969/j.issn.1672-9730.2018.06.001 |
| 22 | 钮伟, 黄佳沁, 缪礼锋. 无人机蜂群对海作战概念与关键技术研究[J]. 指挥控制与仿真, 2018, 40 (1): 20- 27. |
| NIU W , HUANG J Q , MIAO L F . Research on the concept and key technologies of unmanned aerial vehicle swarm concerning naval attack[J]. Command Control & Simulation, 2018, 40 (1): 20- 27. | |
| 23 | 邢冬静. 无人机集群作战自主任务规划方法研究[D]. 南京: 南京航空航天大学, 2019. |
| XING D J. Autonomous mission planning method for unmanned aerial vehicle swarm operations[D]. Nanjing: Nanjing University of Aeronautics & Astronautics, 2019. | |
| 24 | 王祥科, 刘志宏, 丛一睿, 等. 小型固定翼无人机集群综述和未来发展[J]. 航空学报, 2020, 41 (4): 20- 45. |
| WANG X K , LIU Z H , CONG Y R , et al. Miniature fixed-wing UAV swarms: review and outlook[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (4): 20- 45. | |
| 25 | 刘荣华. 无人机集群作战系统研究进展[J]. 中国战略新兴产业, 2020, (10): 145. |
| LIU R H . Research progress of UAV swarm combat system[J]. China Strategic Emerging Industry, 2020, (10): 145. | |
| 26 | 顾海燕. 美军无人机集群作战的发展启示[J]. 电讯技术, 2018, 58 (7): 865- 870. |
| GU H Y . Development inspirations of US multiple-UAV coope-rative engagement[J]. Telecommunication Engineering, 2018, 58 (7): 865- 870. | |
| 27 | 韩月明, 方丹, 张红艳, 等. 智能无人机集群协同作战效能评估综述[J]. 飞航导弹, 2020, (8): 51- 56. |
| HAN Y M , FANG D , ZHANG H Y , et al. Review on coope-rative operation effectiveness evaluation of intelligent UAV swarm[J]. Aerodynamic Missile Journal, 2020, (8): 51- 56. | |
| 28 | MEHTA A. Pentagon launches 103 unit drone swarm[EB/OL]. [2022-03-12]. https://www.defensenews.com/air/2017/01/10/pentagon-launches-103-unit-drone-swarm/. |
| 29 | Defense Advanced Research Projects Agency. System of systems integration technology and experimentation (SoSITE)[EB/OL]. [2022-03-12]. https://www.darpa.mil/program/system-of-systems-integration-technology-and-experimentation. |
| 30 | Defense Advanced Research Projects Agency. Collaborative operations in denied environment (CODE)[EB/OL]. [2022-03-12]. http://www.darpa.mil/program/collaborative-operations-in-denied-environment. |
| 31 | Defense Advanced Research Projects Agency. Squad X experimentation program[EB/OL]. [2022-03-12]. https://www.darpa.mil/program/squad-x. |
| 32 | Defense Advanced Research Projects Agency. Faster, lighter, smarter: DARPA gives small autonomous systems a tech boots[EB/OL]. [2022-03-12]. http://www.darpa.mil/news-events/2018-07-18. |
| 33 | Defense Advanced Research Projects Agency. Gremlins on track for demonstration flights in 2019[EB/OL]. [2022-03-12]. https://www.darpa.mil/news-events/2018-05-09. |
| 34 | The Office of Nawal Research. LOCUST: autonomous, swarming UAVs fly into the future[EB/OL]. [2022-03-12]. https://www.onr.navy.mil/en/Media-Center/Press-Releases/2015/LOCUST-low-cost-UAV-swarm-ONR. |
| 35 |
JAFFE J S , FRANKS P J S , ROBERTS P L D , et al. A swarm of autonomous miniature underwater robot drifters for exploring submesoscale ocean dynamics[J]. Nature Communications, 2017, 8 (1): 14189.
doi: 10.1038/ncomms14189 |
| 36 | The Maritime Executive. NASA, U.S. Navy team up to test microdrones[EB/OL]. [2022-03-12]. https://www.maritime-executive.com/article/nasa-u-s-navy-team-up-to-test-microdrones. |
| 37 | Aquabotix Swarm Diver. A micro drone for ocean swarming[EB/OL]. [2022-03-10]. https://www.therobotreport.com/aquabotix-swarmdiver-ocean-swarming. |
| 38 | OLLERO A , LACROIX S , MERINO L , et al. Multiple eyes in the skies: architecture and perception issues in the COMETS unmanned air uehicles project[J]. IEEE Robotics & Automation Magazine, 2005, 12 (2): 46- 57. |
| 39 | FRANKLIN M. Unmanned combat air vehicles: opportunities for the guided weapons industry[R]. London: Royal United Services Institute for Defense and Security Studies, 2008. |
| 40 | SCHMICKL T, THENIUS R, MOSLINGER C, et al. CoCoRo-the self-aware underwater swarm[C]//Proc. of the 5th IEEE Conference on Self-Adaptive and Self-Organizing Systems Workshops, 2011. |
| 41 | 段海滨, 申燕凯, 赵彦杰, 等. 2020年无人机热点回眸[J]. 科技导报, 2021, 39 (1): 233- 247. |
| DUAN H B , SHEN Y K , ZHAO Y J , et al. Review of technological hotspots of unmanned aerial vehicle in 2020[J]. Science & Technology Review, 2021, 39 (1): 233- 247. | |
| 42 | India TV News Desk. Development of swarms of drones underway to take out airstrikes like Balakot[EB/OL]. [2022-03-12]. https://www.indiatvnews.com/news/india-swarms-of-drones-balakot-airstrike-534581. |
| 43 |
WANG X K , SHEN L C , LIU Z H , et al. Coordinated flight control of miniature fixed-wing UAV swarms: methods and experiments[J]. Science China Information Sciences, 2019, 62 (11): 212204.
doi: 10.1007/s11432-018-9887-5 |
| 44 | 段海滨, 邱华鑫. 基于群体智能的无人机集群自主控制[M]. 北京: 科学出版社, 2018. |
| DUAN H B , QIU H X . Unmanned aerial vehicle swarm auto-nomous control based on swarm intelligence[M]. Beijing: Science Press, 2018. | |
| 45 | 潘光, 宋保维, 黄桥高, 等. 水下无人系统发展现状及其关键技术[J]. 水下无人系统学报, 2017, 25 (1): 44- 51. |
| PAN G , SONG B W , HUANG Q G , et al. Development and key techniques of unmanned undersea system[J]. Journal of Unmanned Undersea Systems, 2017, 25 (1): 44- 51. | |
| 46 | 王元鑫, 温家鑫, 袁涛, 等. 无人机集结问题主要性能指标[J]. 兵工自动化, 2020, 39 (10): 71- 75. |
| WANG Y X , WEN J X , YUAN T , et al. Main performance index of UAV aggregation problem[J]. Ordnance Industry Automation, 2020, 39 (10): 71- 75. | |
| 47 | HYLAND M T, MULLINS B E, BALDWIN R O, et al. Simulation-based performance evaluation of mobile ad hoc routing protocols in a swarm of unmanned aerial vehicles[C]//Proc. of the 21st International Conference on Advanced Information Networking and Applications Workshops, 2007: 249-256. |
| 48 |
SONG H , LIU L J , PUDLEWSKI S M , et al. Random network coding enabled routing protocol in unmanned aerial vehicle networks[J]. IEEE Trans.on Wireless Communications, 2020, 19 (12): 8382- 8395.
doi: 10.1109/TWC.2020.3022399 |
| 49 |
ZHENG Y , CHEN Z , LYU D L , et al. Air-to-air visual detection of micro-UAVs: an experimental evaluation of deep learning[J]. IEEE Robotics and Automation Letters, 2021, 6 (2): 1020- 1027.
doi: 10.1109/LRA.2021.3056059 |
| 50 |
YANG Y C , LIU C , LI J , et al. Design, implementation, and verification of a low-cost terminal guidance system for small fixed-wing UAVs[J]. Journal of Field Robotics, 2021, 38 (5): 801- 827.
doi: 10.1002/rob.22012 |
| 51 | AMORIM J C , ALVES V , FREITAS E . Assessing a swarm-GAP based solution for the task allocation problem in dynamic scenarios[J]. Expert Systems with Applications, 2020, 152 (19): 113437. |
| 52 |
陈亮, 沈延安, 叶霖. 基于DEA的战术无人侦察机系统编配效能评估方法[J]. 计算机与数字工程, 2016, 44 (11): 2184- 2190.
doi: 10.3969/j.issn.1672-9722.2016.11.019 |
|
CHEN L , SHEN Y A , YE L . Formation efficiency evaluating for tactical UAV system based on benchmarking management and DEA methods[J]. Computer & Digital Engineering, 2016, 44 (11): 2184- 2190.
doi: 10.3969/j.issn.1672-9722.2016.11.019 |
|
| 53 | 曹文静, 杨林. 多无人机自主协同方法协同性能研究[J]. 飞航导弹, 2017, (5): 43- 49. |
| CAO W J , YANG L . Research on the performance of autonomous cooperative method of multiple UAVs[J]. Aerodynamic Missile Journal, 2017, (5): 43- 49. | |
| 54 | 高杨, 李东生. 基于态势感知一致性的UAV集群分布式协同性能分析[J]. 宇航学报, 2018, 39 (10): 1148- 1156. |
| GAO Y , LI D S . UAV swarm distributed cooperative performance analysis based on situation awareness consensus[J]. Journal of Astronautics, 2018, 39 (10): 1148- 1156. | |
| 55 | WEI L, HUANG C X, CHEN K M, et al. A quantitative eva-luation method of surveillance coverage of UAVs swarm[C]//Proc. of the International Conference on Cloud Computing and Security, 2017: 772-782. |
| 56 |
GAO Y , LI D S . UAV swarm cooperative situation perception consensus evaluation method based on three-parameter interval number and heronian mean operator[J]. IEEE Access, 2018, 6, 73328- 73340.
doi: 10.1109/ACCESS.2018.2882409 |
| 57 |
高杨, 李东生, 柳向. 无人机集群协同态势觉察一致性评估[J]. 电子学报, 2019, 47 (1): 190- 196.
doi: 10.3969/j.issn.0372-2112.2019.01.025 |
|
GAO Y , LI D S , LIU X . UAV swarm cooperative situation perception consensus evaluation[J]. Acta Electronica Sinica, 2019, 47 (1): 190- 196.
doi: 10.3969/j.issn.0372-2112.2019.01.025 |
|
| 58 | 唐帅文, 周志杰, 姜江, 等. 考虑扰动的无人机集群协同态势感知一致性评估[J]. 航空学报, 2020, 41 (S2): 13- 23. |
| TANG S W , ZHOU Z J , JIANG J , et al. Consensus evaluation of UAV swarm cooperative situation awareness considering perturbation[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (S2): 13- 23. | |
| 59 | 陈士涛, 张海林. 基于作战网络模型的异构无人机集群作战能力评估[J]. 军事运筹与系统工程, 2019, 33 (1): 38- 43. |
| CHEN S T , ZHANG H L . Evaluation of heterogeneous UAV swarm combat capability based on combat network model[J]. Military Operations Research and Systems Engineering, 2019, 33 (1): 38- 43. | |
| 60 | GAO Y , LI D S . Consensus evaluation method of multi-ground-target threat for unmanned aerial vehicle swarm based on hete-rogeneous group decision making[J]. Computers & Electrical Engineering, 2019, 74, 223- 232. |
| 61 |
吴静, 王琪. 编队协同对地攻击总体作战效能评估[J]. 计算机系统应用, 2012, 21 (3): 83- 86.
doi: 10.3969/j.issn.1003-3254.2012.03.019 |
|
WU J , WANG Q . Operational effectiveness evaluation for formation attacking ground targets[J]. Computer Systems & Application, 2012, 21 (3): 83- 86.
doi: 10.3969/j.issn.1003-3254.2012.03.019 |
|
| 62 | 程聪. 无人机协同作战任务分配与攻击效能评估技术[D]. 南京: 南京航空航天大学, 2013. |
| CHENG C. Research on task allocation & attack effectiveness evaluation technique for UAVs cooperatively combating[D]. Nanjing: Nanjing University of Aeronautics & Astronautics, 2013. | |
| 63 | 张笑楠. 基于CapsNet的无人机群智能化效能评估方法研究[D]. 长沙: 国防科技大学, 2018. |
| ZHANG X N. Research on intelligent effectiveness evaluation method of UAV swarm based on CapsNet[D]. Changsha: National University of Defense Technology, 2018. | |
| 64 | 黄吉传, 周德云. 无人机协同作战效能评估指标体系设计与分析[J]. 西安工业大学学报, 2020, 40 (1): 38- 44. |
| HUANG J C , ZHOU D Y . Design and analysis of an evaluation index system for UAV cooperative combat effectiveness[J]. Journal of Xi'an Technological University, 2020, 40 (1): 38- 44. | |
| 65 | 王瑛, 史翔宇, 李超. 基于DoDAF的无人机协同作战效能评估[J]. 空军工程大学学报(自然科学版), 2020, 21 (6): 66- 72. |
| WANG Y , SHI X Y , LI C . Research on evaluation of UAV cooperative combat effectiveness based on DoDAF[J]. Journal of Air Force Engineering University (Natural Science Edition), 2020, 21 (6): 66- 72. | |
| 66 |
JIA N P , YANG Z W , YANG K W . Operational effectiveness evaluation of the swarming UAVs combat system based on a system dynamics model[J]. IEEE Access, 2019, 7, 25209- 25224.
doi: 10.1109/ACCESS.2019.2898728 |
| 67 | 齐智敏, 张海林, 伊山, 等. 智能无人机群体作战效能评估指标体系研究[J]. 舰船电子工程, 2021, 41 (9): 1- 5. |
| QI Z M , ZHANG H L , YI S , et al. Research on the index system of intelligent UAV group combat effectiveness evaluation[J]. Ship Electronic Engineering, 2021, 41 (9): 1- 5. | |
| 68 | 沈林成, 牛轶峰, 朱华勇. 多无人机自主协同控制理论与方法[M]. 北京: 国防工业出版社, 2018. |
| SHEN L C , NIU Y F , ZHU H Y . Theories and methods of autonomous cooperative control for multiple UAVs[M]. Beijing: National Defense Industry Press, 2018. | |
| 69 | 贾高伟, 王建峰. 无人机集群任务规划方法研究综述[J]. 系统工程与电子技术, 2021, 43 (1): 99- 111. |
| JIA G W , WANG J F . Research review of UAV swarm mission planning method[J]. System Engineering and Electronics, 2021, 43 (1): 99- 111. | |
| 70 |
HUANG L W , QU H , ZUO L . Multi-type UAVs cooperative task allocation under resource constraints[J]. IEEE Access, 2018, 6, 17841- 17850.
doi: 10.1109/ACCESS.2018.2818733 |
| 71 | OZALP N, AYAN U, OZTOP E. Cooperative multi-task assignment for heterogonous UAVs[C]//Proc. of the 17th International Conference on Advanced Robotics, 2015: 599-604. |
| 72 |
ZHANG C , ZENG Y . Aerial-ground cost tradeoff for multi-UAV-enabled data collection in wireless sensor networks[J]. IEEE Trans.on Communications, 2020, 68 (3): 1937- 1950.
doi: 10.1109/TCOMM.2019.2962479 |
| 73 | EDISON E , SHIMA T . Integrated task assignment and path optimization for cooperating uninhabited aerial vehicles using genetic algorithms[J]. Computers & Operations Research, 2011, 38 (1): 340- 356. |
| 74 |
HU X X , MA H W , YE Q S , et al. Hierarchical method of task assignment for multiple cooperating UAV teams[J]. Journal of Systems Engineering and Electronics, 2015, 26 (5): 1000- 1009.
doi: 10.1109/JSEE.2015.00109 |
| 75 | ZHANG Y Z, XU J L, WU Z R, et al. Complex task assignment of heterogeneous UAVs under timing constraints[C]//Proc. of the 16th International Conference on Control & Automation, 2020: 853-858. |
| 76 |
YAN M , YUAN H M , XU J , et al. Task allocation and route planning of multiple UAVs in a marine environment based on an improved particle swarm optimization algorithm[J]. EURASIP Journal on Advances in Signal Processing, 2021, 2021, 94.
doi: 10.1186/s13634-021-00804-9 |
| 77 |
ZHANG J D , CHEN Y Y , YANG Q M , et al. Dynamic task allocation of multiple UAVs based on improved A-QCDPSO[J]. Electronics, 2022, 11 (7): 1028.
doi: 10.3390/electronics11071028 |
| 78 | 张瑞鹏, 冯彦翔, 杨宜康. 多无人机协同任务分配混合粒子群算法[J]. 航空学报, 2022, 43 (12): 326011. |
| ZHANG R P , FENG Y X , YANG Y K . Hybrid particle swarm algorithm for multi-UAV cooperative task allocation[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43 (12): 326011. | |
| 79 |
WANG J F , JIA G W , LIN J C , et al. Cooperative task allocation for heterogeneous multi-UAV using multi-objective optimization algorithm[J]. Journal of Central South University, 2020, 27 (2): 432- 448.
doi: 10.1007/s11771-020-4307-0 |
| 80 |
XIA G Q , SUN X Q , XIA X M . Multiple task assignment and path planning of a multiple unmanned surface vehicles system based on improved self-organizing mapping and improved genetic algorithm[J]. Journal of Marine Science and Engineering, 2021, 9 (6): 556.
doi: 10.3390/jmse9060556 |
| 81 | 樊娇, 雷涛, 韩伟, 等. 无人机航迹规划技术研究综述[J]. 郑州大学学报(工学版), 2021, 42 (3): 39- 46. |
| FAN J , LEI T , HAN W , et al. A survey of UAV path planning[J]. Journal of Zhengzhou University (Engineering Science), 2021, 42 (3): 39- 46. | |
| 82 |
杨旭, 王锐, 张涛. 面向无人机集群路径规划的智能优化算法综述[J]. 控制理论与应用, 2020, 37 (11): 2291- 2302.
doi: 10.7641/CTA.2020.00105 |
|
YANG X , WANG R , ZHANG T . Review of unmanned aerial vehicle swarm path planning based on intelligent optimization[J]. Control Theory & Applications, 2020, 37 (11): 2291- 2302.
doi: 10.7641/CTA.2020.00105 |
|
| 83 |
WU Y , LOW K H , LYU C . Cooperative path planning for heterogeneous unmanned vehicles in a search-and-track mission aiming at an underwater target[J]. IEEE Trans.on Vehicular Technology, 2020, 69 (6): 6782- 6787.
doi: 10.1109/TVT.2020.2991983 |
| 84 |
SUN X L , LIU Y F , YAO W R , et al. Triple-stage path prediction algorithm for real-time mission planning of multi-UAV[J]. Electronics Letters, 2015, 51 (19): 1490- 1492.
doi: 10.1049/el.2015.1244 |
| 85 | YANG F , FANG X , GAO F , et al. Obstacle avoidance path planning for UAV based on improved RRT Algorithm[J]. Discrete Dynamics in Nature and Society, 2022, 2022, 4544499. |
| 86 |
HE W J , QI X G , LIU L F . A novel hybrid particle swarm optimization for multi-UAV cooperate path planning[J]. Applied Intelligence, 2021, 51 (10): 7350- 7364.
doi: 10.1007/s10489-020-02082-8 |
| 87 |
PHUNG M D , HA Q P . Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization[J]. Applied Soft Computing, 2021, 107, 107376.
doi: 10.1016/j.asoc.2021.107376 |
| 88 |
陈侠, 刘永泰. 多UAV攻击移动目标的协同任务分配与航迹规划[J]. 火力与指挥控制, 2020, 45 (9): 35-40, 46.
doi: 10.3969/j.issn.1002-0640.2020.09.007 |
|
CHEN X , LIU Y T . Cooperative task assignment and track planning for multi-UAV attack mobile targets[J]. Fire Control & Command Control, 2020, 45 (9): 35-40, 46.
doi: 10.3969/j.issn.1002-0640.2020.09.007 |
|
| 89 | 苏雪. 无人机集群作战的航迹规划和任务分配技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2018. |
| SU X. Research on path planning and task allocation technology for UAV swarms[D]. Harbin: Harbin Engineering University, 2018. | |
| 90 |
ZHANG Y , WANG P F , YANG L Q , et al. Novel swarm intelligence algorithm for global optimization and multi-UAVs cooperative path planning: anas platyrhynchos optimizer[J]. Applied Sciences, 2020, 10 (14): 4821.
doi: 10.3390/app10144821 |
| 91 |
WANG Z , LI G F , REN J . Dynamic path planning for unmanned surface vehicle in complex offshore areas based on hybrid algorithm[J]. Computer Communications, 2021, 166, 49- 56.
doi: 10.1016/j.comcom.2020.11.012 |
| 92 | 段海滨, 李沛. 基于生物群集行为的无人机集群控制[J]. 科技导报, 2017, 35 (7): 17- 25. |
| DUAN H B , LI P . Autonomous control for unmanned aerial vehicle swarms based on biological collective behaviors[J]. Science & Technology Review, 2017, 35 (7): 17- 25. | |
| 93 | 周宇亮. 无人机集群编队控制技术研究[D]. 广州: 华南理工大学, 2019. |
| ZHOU Y L. Research on UAV swarm formation control technology[D]. Guangzhou: South China University of Technology, 2019. | |
| 94 |
ASKARI A , MORTAZAVI M , TALEBI H A . UAV formation control via the virtual structure approach[J]. Journal of Aerospace Engineering, 2015, 28 (1): 04014047.
doi: 10.1061/(ASCE)AS.1943-5525.0000351 |
| 95 | 刘树光, 刘荣华, 王欢, 等. 国外无人机集群协同控制技术新进展[J]. 飞航导弹, 2021, (8): 24- 31. |
| LIU S G , LIU R H , WANG H , et al. New development of UAV swarm cooperative control technologies abroad[J]. Aerodynamic Missile Journal, 2021, 8, 24- 31. |
| [1] | 谢震海, 何明, 禹明刚, 余烤华, 袁国栋. 面向策略多样性的无人集群合作演化建模及仿真[J]. 系统工程与电子技术, 2023, 45(9): 2852-2859. |
| [2] | 王强, 高云翔, 杭爽, 张笔峰. 基于综合集成法的军事战略能力评估方法[J]. 系统工程与电子技术, 2023, 45(8): 2312-2317. |
| [3] | 黄炎焱, 王凯生, 史宇昂. 基于网络化指标的数据链作战保障能力评估模型研究[J]. 系统工程与电子技术, 2023, 45(8): 2361-2369. |
| [4] | 程绍驰, 游光荣. 基于改进随机森林算法的评估指标精简方法研究[J]. 系统工程与电子技术, 2023, 45(7): 2108-2113. |
| [5] | 张毅, 于浩, 杨秀霞, 姜子劼. 异构无人集群分组编队自适应跟踪-合围控制[J]. 系统工程与电子技术, 2023, 45(10): 3274-3285. |
| [6] | 丁刚, 张琳, 崔利杰, 张亮, 李新春. 航空装备单元维修保障仿真评估方法研究[J]. 系统工程与电子技术, 2022, 44(4): 1246-1255. |
| [7] | 王永攀, 苏建新, 龚明, 刘华. 面向作战的雷达全功能操作训练效果评估模型[J]. 系统工程与电子技术, 2022, 44(12): 3766-3774. |
| [8] | 禹明刚, 何明, 张东戈, 马子玉, 康凯. 基于多元公共品演化博弈的无人作战集群策略占优条件[J]. 系统工程与电子技术, 2021, 43(9): 2553-2561. |
| [9] | 王哲, 李建华, 康东. 网络信息体系双层异质相依网络模型鲁棒性[J]. 系统工程与电子技术, 2021, 43(4): 961-969. |
| [10] | 姚智海, 刘建平, 王建平, 李伟, 任勃. 地面测控资源调度效能评估指标体系[J]. 系统工程与电子技术, 2020, 42(8): 1751-1758. |
| [11] | 禹明刚, 张东戈, 康凯, 朱卫星. 基于多元公共品演化博弈的无人集群合作演化机制[J]. 系统工程与电子技术, 2020, 42(12): 2787-2794. |
| [12] | 王双川, 胡起伟, 李锋, 王强, 冉悄然, 马云飞. 装备维修保障效能评估研究综述[J]. 系统工程与电子技术, 2019, 41(10): 2271-2278. |
| [13] | 吴延勋, 秦现生, 张海峰. 基于模糊神经网络的复杂产品研发决策评估[J]. Journal of Systems Engineering and Electronics, 2011, 33(7): 1575-1579. |
| [14] | 李波, 赵洁, 郭晋. 设备故障评估新指标及基于ARMA的预测系统[J]. Journal of Systems Engineering and Electronics, 2011, 33(1): 98-0101. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||