
系统工程与电子技术 ›› 2023, Vol. 46 ›› Issue (1): 280-289.doi: 10.12305/j.issn.1001-506X.2024.01.32
• 制导、导航与控制 • 上一篇
黄万炎1, 杜万和1,2,*, 杨淑珍1,2, 俞涛1
收稿日期:2022-09-27
出版日期:2023-12-28
发布日期:2024-01-11
通讯作者:
杜万和
作者简介:黄万炎 (1990—), 男, 硕士研究生, 主要研究方向为3D轮廓检测及轨迹预测Wanyan HUANG1, Wanhe DU1,2,*, Shuzhen YANG1,2, Tao YU1
Received:2022-09-27
Online:2023-12-28
Published:2024-01-11
Contact:
Wanhe DU
摘要:
针对传统多项式曲线拟合轨迹预测算法对复杂多变的轨迹预测准确率不高问题, 提出改进的多项式曲线拟合轨迹预测算法。首先, 获得轨迹的曲率、挠率阈值; 然后, 通过该阈值识别预测误差可能较大的轨迹部位, 并采用插值滚动预测算法进行预测; 最后, 采用双误差预测值更新算法, 对预测值进行更新。仿真结果表明, 相较于传统多项式曲线拟合轨迹预测算法, 所提算法的平均位移误差(average displacement error, ADE)下降了42.77%, 最终位移误差(final displacement error, FDE)下降了36.62%, 从而验证了所提算法的可行性和有效性。
中图分类号:
黄万炎, 杜万和, 杨淑珍, 俞涛. 改进的多项式曲线拟合轨迹预测算法[J]. 系统工程与电子技术, 2023, 46(1): 280-289.
Wanyan HUANG, Wanhe DU, Shuzhen YANG, Tao YU. Trajectory prediction algorithm based on improved polynomial curve fitting[J]. Systems Engineering and Electronics, 2023, 46(1): 280-289.

图1
轨迹离散化示意图"
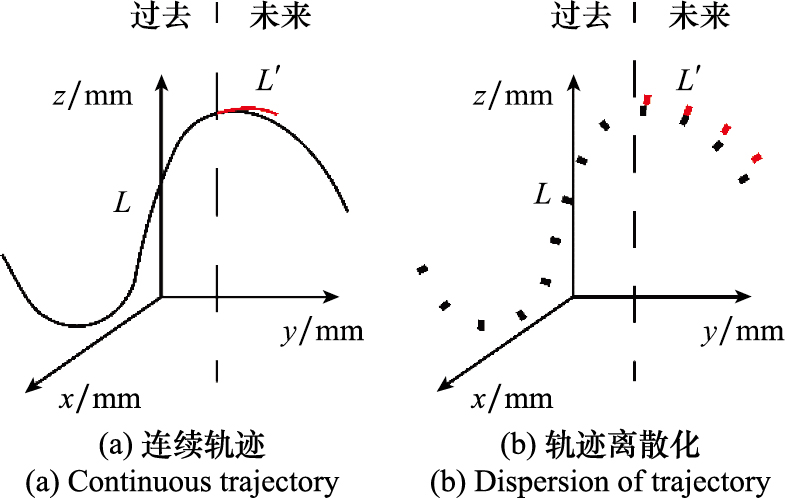

图2
轨迹预测模型示意图"


图3
轨迹动态预测模型示意图"
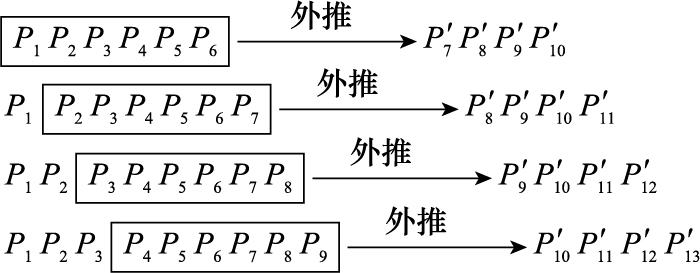

图4
缩小采样间隔的轨迹预测示意图"


图5
相邻两个预测点的误差比较"
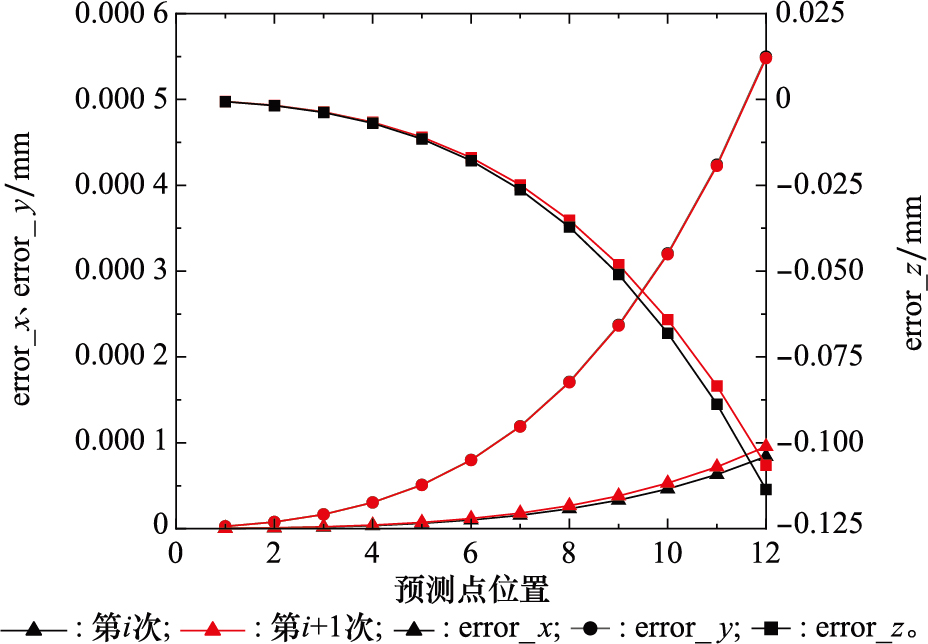

图6
单步预测中双误差预测值更新示意图"
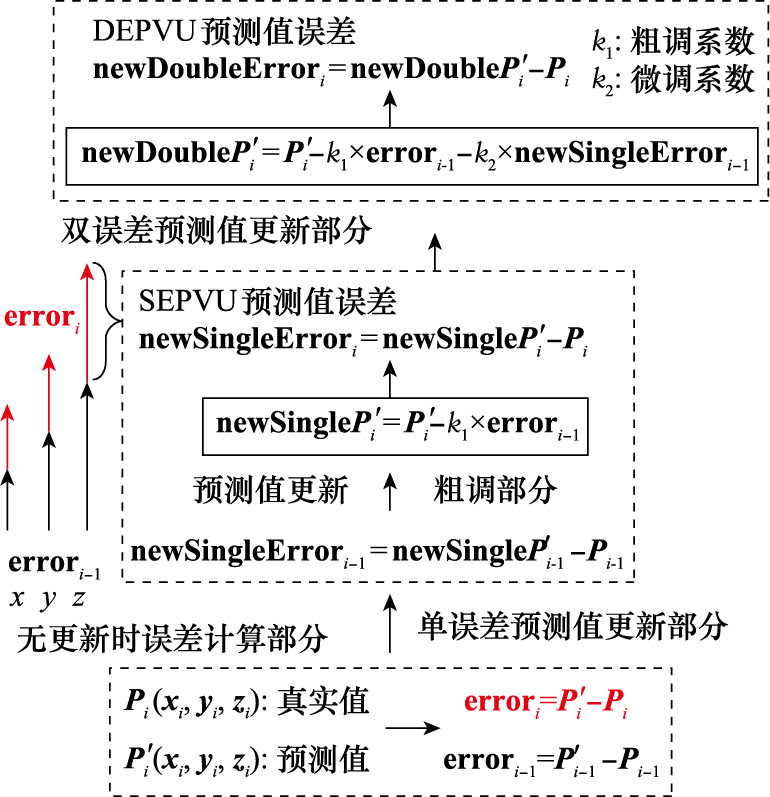

图7
多步预测第i-1次误差取值过程(k=3)"


图8
IPCFTPA流程图"

表1
3类仿真数据及其描述"
| 数据 | 参数方程 | 描述 |
| 1 | t∈[0, 2π] | |
| 2 | / | 3次B样条曲线, 点数230 |
| 3 | t∈[0, 8π] 点数为300 |

图9
仿真数据三维图"


图10
真实三维空间轨迹"


图11
预处理后的轨迹"
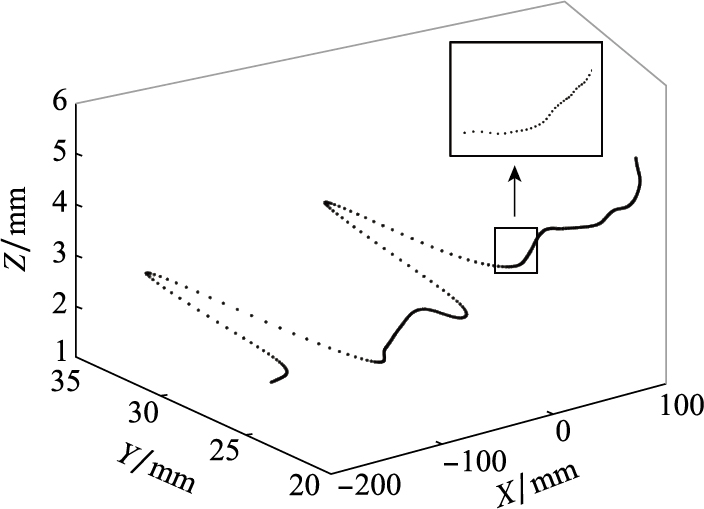

图12
不同拟合阶数的轨迹预测情况"
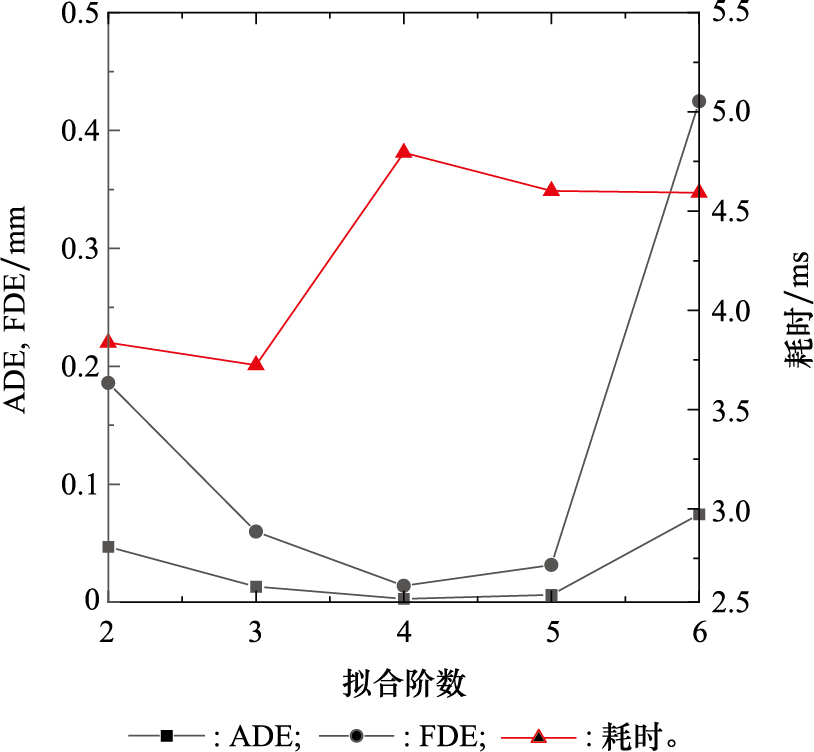

图13
调节系数对轨迹预测的影响"
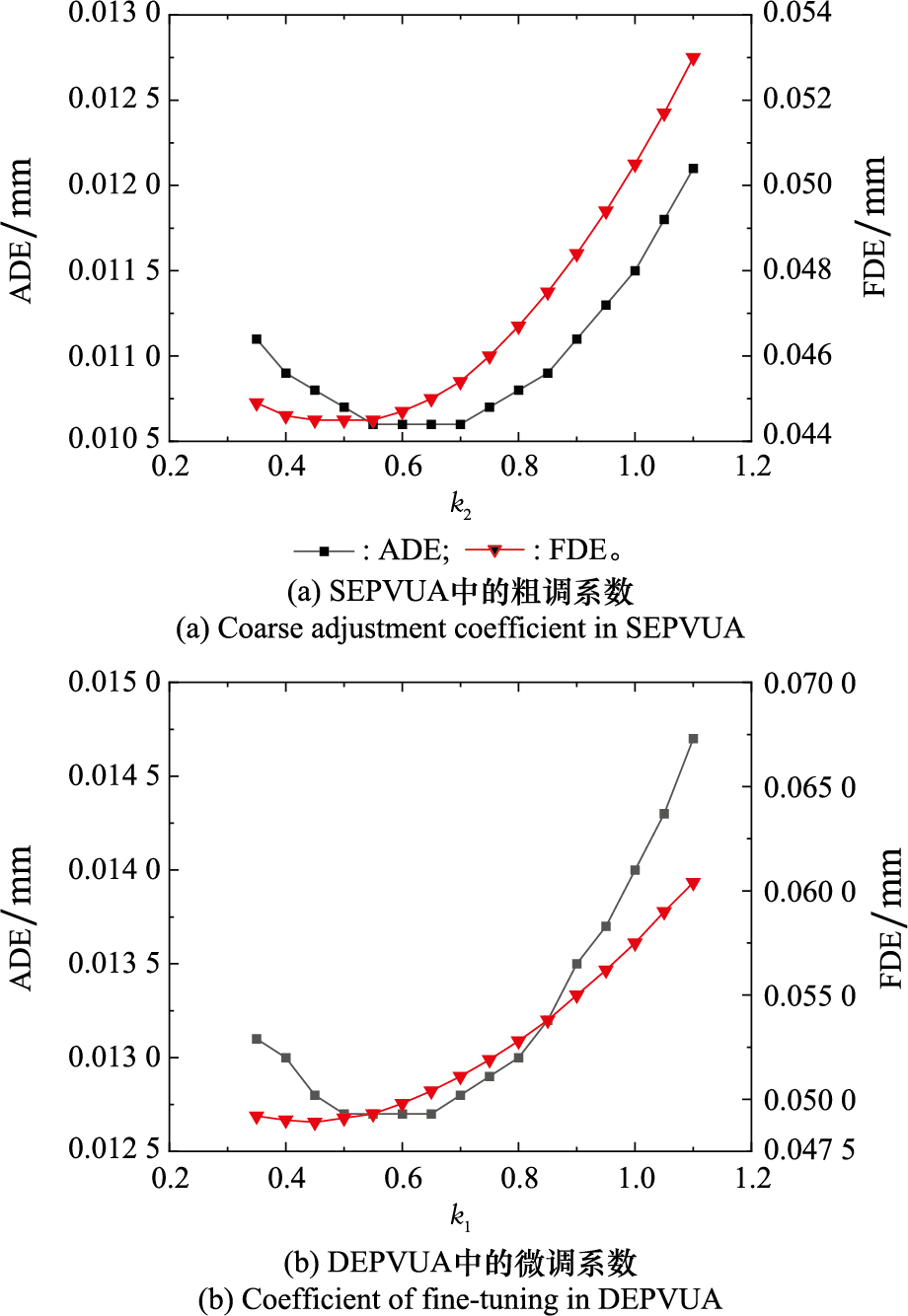
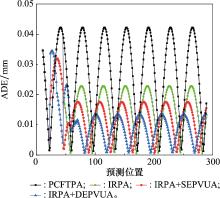
图14
仿真数据1不同算法不同位置的ADE情况"

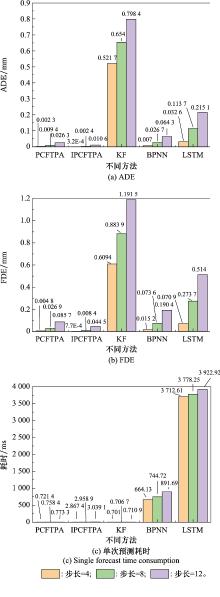
图15
仿真数据1用不同方法在不同预测步长下的轨迹预测情况"
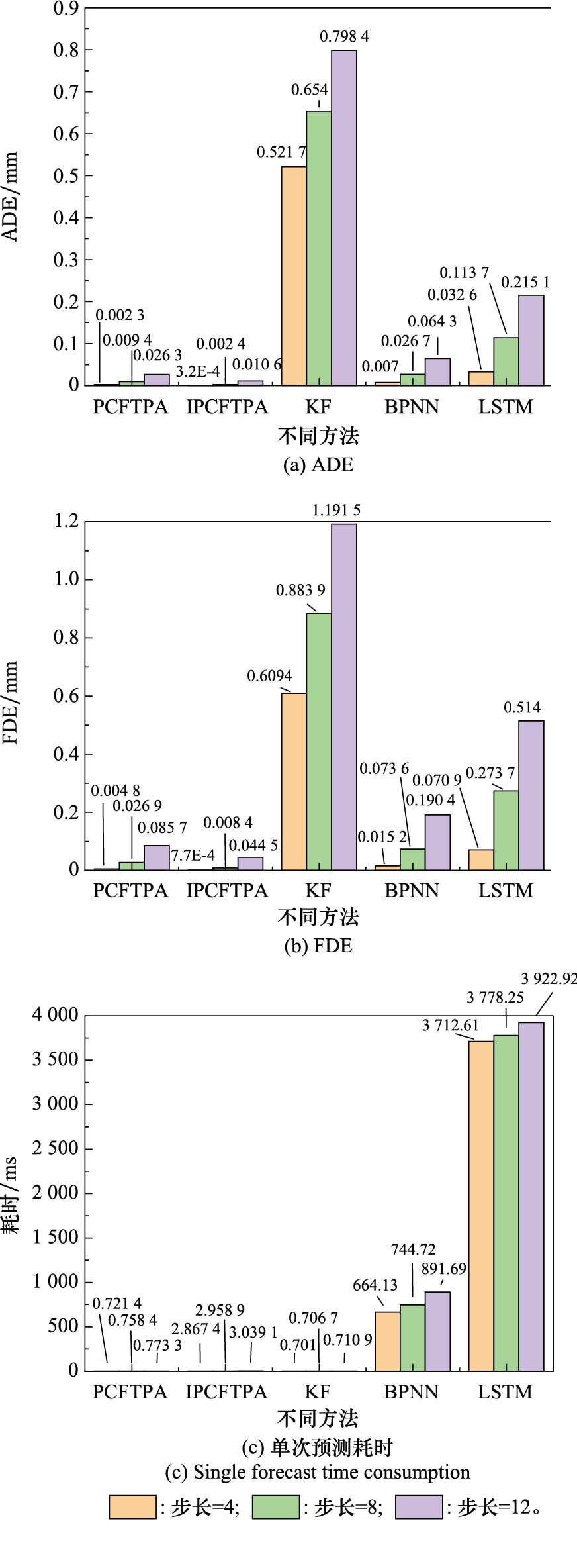
表2
仿真数据2不同方法的预测情况"
| 算法 | ADE/mm | FDE/mm | 耗时/ms |
| IPCFTPA | 0.004 4 | 0.015 9 | 3.902 3 |
| PCFTPA | 0.008 2 | 0.027 0 | 0.737 3 |
| KF | 2.910 6 | 3.403 9 | 0.602 4 |
| BPNN | 0.057 5 | 0.181 2 | 1 130.530 0 |
| LSTM | 1.971 4 | 4.581 6 | 8 519.360 0 |
表3
仿真数据3不同预测方法的预测情况"
| 算法 | ADE/mm | FDE/mm | 耗时/ms |
| IPCFTPA | 0.323 3 | 1.150 6 | 1.837 3 |
| PCFTPA | 0.558 3 | 1.827 8 | 0.754 8 |
| KF | 9.896 5 | 11.63 | 0.786 9 |
| BPNN | 1.107 4 | 3.312 | 1 460.910 0 |
| LSTM | 6.096 7 | 12.988 | 3 656.130 0 |
表4
真实数据1不同方法预测情况"
| 算法 | ADE/mm | FDE/mm | 耗时/ms |
| IPCFTPA | 0.864 7 | 2.167 3 | 3.833 2 |
| PCFTPA | 1.539 5 | 4.294 9 | 0.750 8 |
| KF | 3.384 1 | 3.899 3 | 0.889 5 |
| BPNN | 1.228 1 | 2.722 1 | 1 450.820 0 |
| LSTM | 4.968 1 | 10.324 | 6 919.180 0 |
表5
不同数据IPCFTPA相较于PCFTPA的ADE、FDE降低比例"
| 数据 | KADE | KFDE |
| 仿真数据1 | 59.70 | 48.07 |
| 仿真数据2 | 46.34 | 32.65 |
| 仿真数据3 | 42.09 | 37.05 |
| 仿真数据均值 | 49.38 | 39.26 |
| 真实数据1 | 43.83 | 49.54 |
| 真实数据2 | 32.99 | 26.78 |
| 真实数据3 | 31.64 | 25.64 |
| 真实数据均值 | 36.15 | 33.99 |
| 总均值 | 42.77 | 36.62 |
| 1 |
HAO X , HUYNH D Q , REYNOLDS M . PoPPL: pedestrian trajectory prediction by LSTM with automatic route class clustering[J]. IEEE Trans. on Neural Networks and Learning Systems, 2021, 32 (1): 77- 90.
doi: 10.1109/TNNLS.2020.2975837 |
| 2 |
YOON Y , KIM T , LEE H , et al. Road-aware trajectory prediction for autonomous driving on highways[J]. Sensors, 2020, 20 (17): 4703.
doi: 10.3390/s20174703 |
| 3 | WU Z Y, CAO Z Q, YU Y Y, et al. A multi-robot cooperative hunting approach based on the dynamic prediction of target motion[C]//Proc. of the IEEE International Conference on Robo-tics and Biomimetics, 2017: 587-592. |
| 4 | DUAN Y, HUANG X, YU X. Multi-robot dynamic virtual potential point hunting strategy based on FIS[C]//Proc. of the IEEE Chinese Guidance, Navigation and Control Conference, 2016: 332-335. |
| 5 | 刘文, 胡琨林, 李岩, 等. 移动目标轨迹预测方法研究综述[J]. 智能科学与技术学报, 2021, 3 (2): 149- 160. |
| LIU W , HU K L , LI Y , et al. A review of prediction methods for moving target trajectories[J]. Chinese Journal of Intelligent Science and Technology, 2021, 3 (2): 149- 160. | |
| 6 |
LEON F , GAVRILESCU M . A review of tracking and trajectory prediction methods for autonomous driving[J]. Mathematics, 2021, 9 (6): 660.
doi: 10.3390/math9060660 |
| 7 | 胡俊, 朱庆保. 基于动态预测目标轨迹和围捕点的多机器人围捕算法[J]. 电子学报, 2011, 39 (11): 2480- 2485. |
| HU J , ZHU Q B . A multi-robot hunting algorithm based on dynamic prediction for trajectory of the moving target and hunting points[J]. Acta Electronica Sinica, 2011, 39 (11): 2480- 2485. | |
| 8 | 张强, 张振标. 基于曲线拟合的机动目标轨迹预测算法研究[J]. 信息化研究, 2018, 44 (6): 12-15, 30. |
| ZHANG Q , ZHANG Z B . Research of maneuvering target tra-jectory prediction based on curve fitting[J]. Informatization Research, 2018, 44 (6): 12-15, 30. | |
| 9 | 李世杰, 雷虎民, 周池军, 等. 基于控制变量估计的高超声速再入滑翔目标轨迹预测算法[J]. 系统工程与电子技术, 2020, 42 (10): 2320- 2327. |
| LI S J , LEI H M , ZHOU C J , et al. Trajectory prediction algorithm for hypersonic reentry gliding target based on control variables estimation[J]. Systems Engineering and Electronics, 2020, 42 (10): 2320- 2327. | |
| 10 |
CAO X , XU X Y . Hunting algorithm for multi-AUV based on dynamic prediction of target trajectory in 3D underwater environment[J]. IEEE Access, 2020, 8, 138529- 138538.
doi: 10.1109/ACCESS.2020.3013032 |
| 11 | WANG Z J, NIE Z Q, SHENG G. Dynamic position predicting of underactuated surface vessel with unscented Kalman filter[C]// Proc. of the 2018 Chinese Automation Congress, 2018: 4030-4033. |
| 12 |
GUO G , ZHAO S J . 3D multi-object tracking with adaptive cubature Kalman filter for autonomous driving[J]. IEEE Trans. on Intelligent Vehicles, 2023, 8 (1): 512- 519.
doi: 10.1109/TIV.2022.3158419 |
| 13 |
MOHAMMAD Z , HOSSEIN G Y , MEHRAN Y . Real-time object tracking based on an adaptive transition model and extended Kalman filter to handle full occlusion[J]. The Visual Computer, 2020, 36 (4): 701- 715.
doi: 10.1007/s00371-019-01652-3 |
| 14 |
ABBAS M T , JIBRAN M A , AFAQ M , et al. An adaptive approach to vehicle trajectory prediction using multimodel Kalman filter[J]. IEEE Trans. on Emerging Telecommunications Technologies, 2020, 31 (5): 3734.
doi: 10.1002/ett.3734 |
| 15 |
THIPPHAVONG D P , SCHULTZ C A , LEE A G , et al. Adaptive algorithm to improve trajectory prediction accuracy of climbing aircraft[J]. Journal of Guidance, Control, and Dynamics, 2013, 36 (1): 15- 24.
doi: 10.2514/1.58508 |
| 16 |
HAN X , TIAN C . Estimation of buoy drifting based on adaptive parameter-varying time scale Kalman filter[J]. Journal of Control and Decision, 2021, 8 (3): 353- 362.
doi: 10.1080/23307706.2020.1808863 |
| 17 |
WU Z J , TIAN S , MA L . A 4D trajectory prediction model based on the BP neural network[J]. Journal of Intelligent Systems, 2019, 29 (1): 1545- 1557.
doi: 10.1515/jisys-2019-0077 |
| 18 |
CHEN K , SONG X , REN X X . Pedestrian trajectory prediction in heterogeneous traffic using pose keypoints-based convolutional encoder-decoder network[J]. IEEE Trans. on Circuits and Systems for Video Technology, 2021, 31 (5): 1764- 1775.
doi: 10.1109/TCSVT.2020.3013254 |
| 19 | LI S, ZHI Y, MELLADO S, et al. 3DOF pedestrian trajectory prediction learned from long-term autonomous mobile robot deployment data[C]//Proc. of the IEEE International Conference on Robotics & Automation, 2018: 5942-5948. |
| 20 | ALTCHE F, FORTELLE A. A LSTM network for highway trajectory prediction[C]//Proc. of the IEEE 20th International Conference on Intelligent Transportation Systems, 2017: 353-359. |
| 21 | ALAHI A, GOEL K, RAMANATHAN V, et al. Social LSTM: human trajectory prediction in crowded spaces[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 961-971. |
| 22 | ZHANG Y H , WEI W , YU D , et al. A tracking and predicting scheme for ping pong robot[J]. Journal of Zhejiang University-Science C(Computers & Electronics), 2011, 12 (2): 110- 115. |
| 23 |
AKABANE R , KATO Y . Pedestrian trajectory prediction based on transfer learning for human-following mobile robots[J]. IEEE Access, 2021, 9, 126172- 126185.
doi: 10.1109/ACCESS.2021.3111917 |
| 24 |
YANG J , SUN X , WANG R G , et al. PTPGC: pedestrian trajectory prediction by graph attention network with Conv- LSTM[J]. Robotics and Autonomous Systems, 2022, 148, 103931.
doi: 10.1016/j.robot.2021.103931 |
| 25 |
SHANNON C . A symbolic analysis of relay and switching circuits[J]. Electrical Engineering, 1938, 57 (12): 713- 723.
doi: 10.1109/EE.1938.6431064 |
| 26 | POSTNIKOV A, GAMAYUNOV A, FERRER G. Transformer based trajectory prediction[C]//Proc. of the 35th Conference on Neural Information Processing Systems, 2021. |
| 27 | ZHU Z R , WU J W , YAN R , et al. Cutting force prediction considering tool path curvature and torsion based on screw theory[J]. The International Journal of Advanced Manufacturing Technology, 2021, 114 (5/6): 1601- 1621. |
| 28 |
PAGANI L , SCOTT P . Curvature based sampling of curves and surfaces[J]. Computer Aided Geometric Design, 2018, 59, 32- 48.
doi: 10.1016/j.cagd.2017.11.004 |
| 29 |
LU L Z , ZHAO S Q . High-quality point sampling for B-spline fitting of parametric curves with feature recognition[J]. Journal of Computational and Applied Mathematics, 2019, 345, 286- 294.
doi: 10.1016/j.cam.2018.04.008 |
| 30 |
YE X Y , ZHU S P , CHEN S . Research on model predictive trajectory following control of automatic vehicle considering prediction error[J]. International Journal of Wireless and Mobile Computing: IJWMC, 2021, 21 (1): 52- 58.
doi: 10.1504/IJWMC.2021.119062 |
| 31 |
VICTOR P , TOMOYUKI M . Smooth curve fitting of mobile robot trajectories using differential evolution[J]. IEEE Access, 2020, 8, 82855- 82866.
doi: 10.1109/ACCESS.2020.2991003 |
| 32 | YAN W, SUNA Y. Three-dimensional curve fitting based on cubic B-spline interpolation curve[C]//Proc. of the 7th International Congress on Image and Signal Processing, 2014: 765-770. |
| 33 | ZHENG F, FANG F, MA X D. Trajectory sampling and fitting restoration based on machine vision for robot fast teaching[C]// Proc. of the 15th IEEE Conference on Industrial Electronics and Applications, 2020: 604-609. |
| [1] | 胡瑞贤, 张昭, 骆成. 一种分布式卫星系统基线优化设计方法[J]. 系统工程与电子技术, 2023, 45(8): 2423-2437. |
| [2] | 查峰, 位秋硕, 何泓洋, 李豹. 基于IMU体对角线旋转的双轴旋转方案[J]. 系统工程与电子技术, 2023, 45(8): 2546-2554. |
| [3] | 戴礼灿, 刘欣, 张海瀛, 代翔, 王成刚. 基于卡尔曼滤波算法展开的飞行目标轨迹预测[J]. 系统工程与电子技术, 2023, 45(6): 1814-1820. |
| [4] | 陈旭, 肖瑶, 杨凌宇, 张晶. 基于简化模型的天线罩寄生回路稳定性分析[J]. 系统工程与电子技术, 2023, 45(6): 1784-1796. |
| [5] | 郑雨晴, 艾小锋, 徐志明, 赵锋, 杨勇. 基于穿越时刻的前向散射雷达网目标参数估计[J]. 系统工程与电子技术, 2023, 45(5): 1323-1332. |
| [6] | 李超, 焦义文, 傅诗媛, 高泽夫, 毛飞龙. 基于GPU的数字下变频累积误差控制方法[J]. 系统工程与电子技术, 2023, 45(4): 965-972. |
| [7] | 唐波, 鲁嘉淇, 郭琨毅, 金从军, 盛新庆. 三元组近场效应的馈电系数修正与各向异性分析[J]. 系统工程与电子技术, 2023, 45(3): 647-653. |
| [8] | 刘备, 边少锋, 纪兵, 贤鹏飞. 小波变换在船载海洋重力测量数据处理与分析中的应用[J]. 系统工程与电子技术, 2023, 45(3): 654-659. |
| [9] | 张育豪, 朱圣棋, 曾操, 崔森, 石琦剑. EPC-MIMO雷达主瓣距离欺骗式干扰抑制方法[J]. 系统工程与电子技术, 2023, 45(3): 690-698. |
| [10] | 王世哲, 李宗吉, 王平波, 孙玉臣. 基于双十字阵的海上弹着点定位误差分析[J]. 系统工程与电子技术, 2023, 45(3): 839-847. |
| [11] | 宋波涛, 许广亮. 基于LSTM与1DCNN的导弹轨迹预测方法[J]. 系统工程与电子技术, 2023, 45(2): 504-512. |
| [12] | 靳凯迪, 柴洪洲, 宿楚涵, 向民志, 李明. 基于状态变换卡尔曼滤波的DVL/SINS组合导航算法[J]. 系统工程与电子技术, 2023, 45(11): 3624-3631. |
| [13] | 唐洪琼, 许江宁, 史文策, 何泓洋, 李方能. 基于位置观测信息的Davenport四元数DVL标定方法[J]. 系统工程与电子技术, 2023, 45(11): 3640-3648. |
| [14] | 李仲悦, 王彤. 基于稀疏贝叶斯学习的稳健STAP算法[J]. 系统工程与电子技术, 2023, 45(10): 3032-3040. |
| [15] | 朱天高, 刘勇, 李开龙, 赵仁杰. 基于欧拉角的李群捷联惯导误差模型分析与比较研究[J]. 系统工程与电子技术, 2023, 45(10): 3265-3273. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||