
系统工程与电子技术 ›› 2023, Vol. 46 ›› Issue (1): 254-260.doi: 10.12305/j.issn.1001-506X.2024.01.29
• 制导、导航与控制 • 上一篇
张宝琛1, 惠建江2, 张琦3, 刘正雄1,*, 黄攀峰1
收稿日期:2023-02-10
出版日期:2023-12-28
发布日期:2024-01-11
通讯作者:
刘正雄
作者简介:张宝琛 (1999—), 男, 硕士研究生, 主要研究方向为人机交互技术基金资助:Baochen ZHANG1, Jianjiang HUI2, Qi ZHANG3, Zhengxiong LIU1,*, Panfeng HUANG1
Received:2023-02-10
Online:2023-12-28
Published:2024-01-11
Contact:
Zhengxiong LIU
摘要:
针对冗余自由度机械臂运动控制中人机交互性不强、避障算法较为复杂且躲避非结构化障碍较为困难的问题, 提出一种面向冗余机械臂避障运动规划的触控交互方法。通过坐标系转换的方式将交互设备屏幕坐标进行变换实现触控交互, 并通过柱面避障运动规划, 提高交互效率。基于虚幻引擎设计触控交互演示软件, 利用触控交互实现了冗余机械臂的运动避障仿真。与传统方法相比, 既兼顾了人机交互的友好性, 又提升了机械臂运动规划的操作效率和可理解性。
中图分类号:
张宝琛, 惠建江, 张琦, 刘正雄, 黄攀峰. 面向冗余机械臂避障运动规划的触控交互技术[J]. 系统工程与电子技术, 2023, 46(1): 254-260.
Baochen ZHANG, Jianjiang HUI, Qi ZHANG, Zhengxiong LIU, Panfeng HUANG. Touch interaction technology for obstacle avoidance motion planning of redundant manipulators[J]. Systems Engineering and Electronics, 2023, 46(1): 254-260.
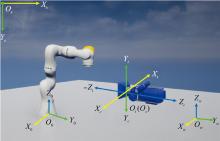
图1
坐标系示意图"
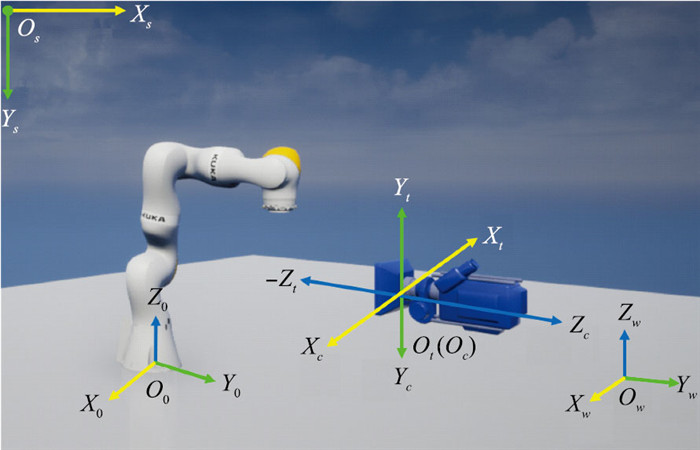
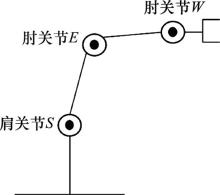
图2
KUKA iiwa简化图"
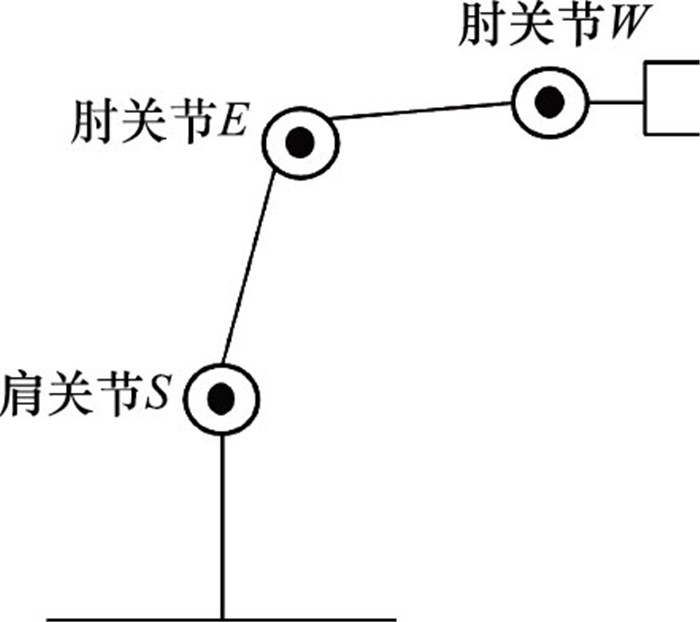
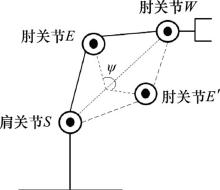
图3
臂型角示意图"
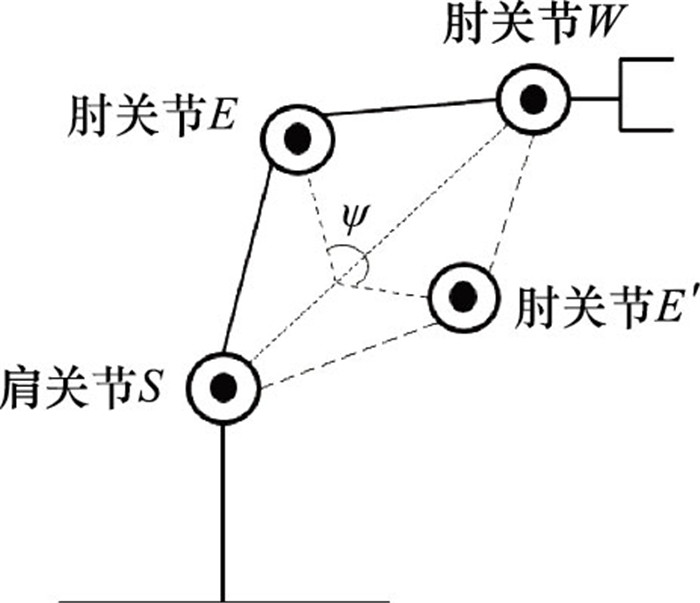
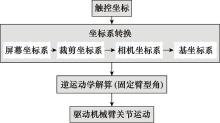
图4
触控移动机械臂末端实现原理"
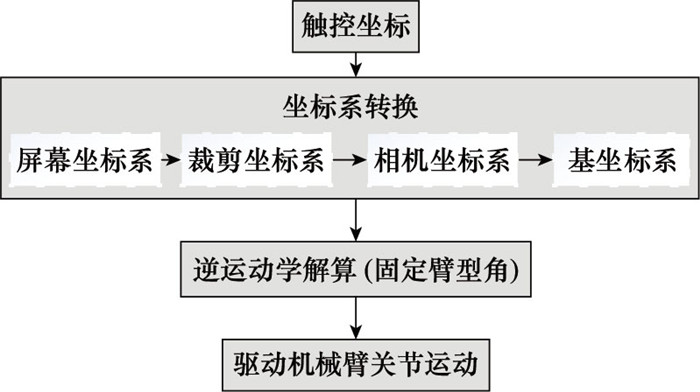
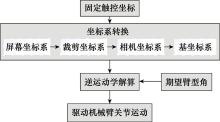
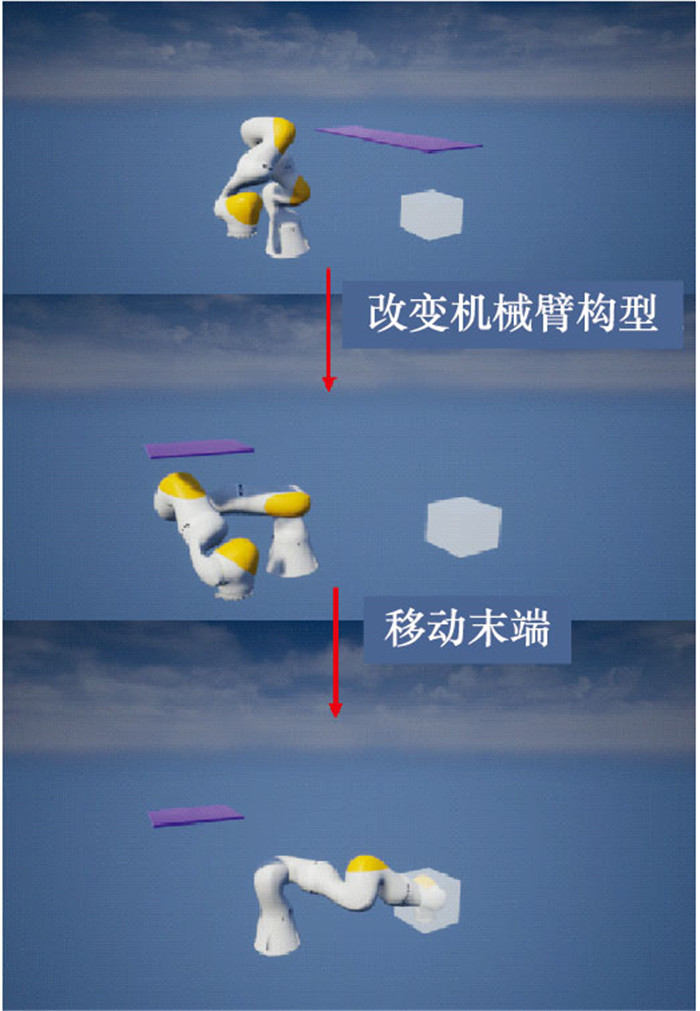
图5
改变机械臂构型实现原理"
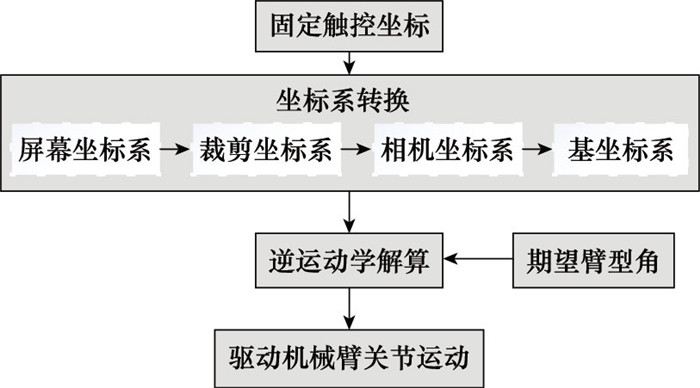
图6
避障运动规划步骤1"
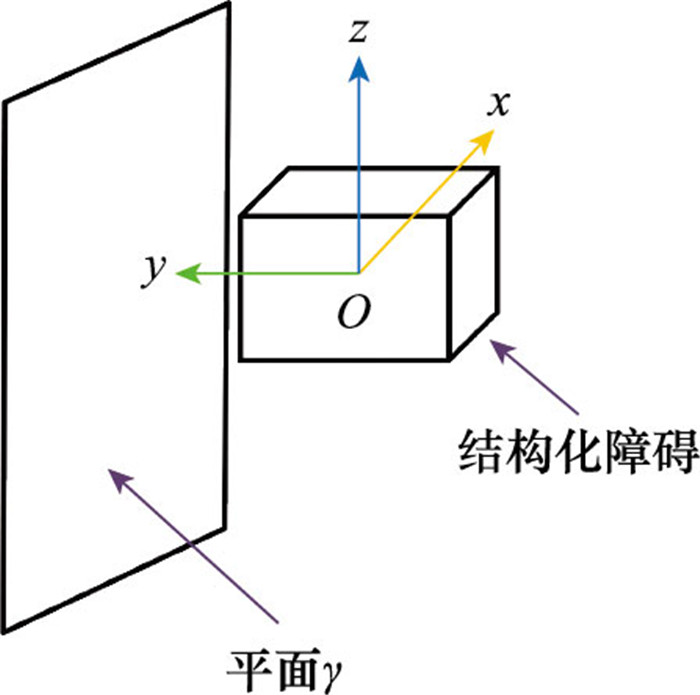
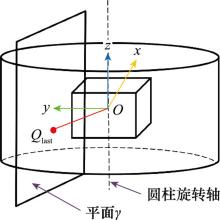
图7
避障运动规划步骤2"
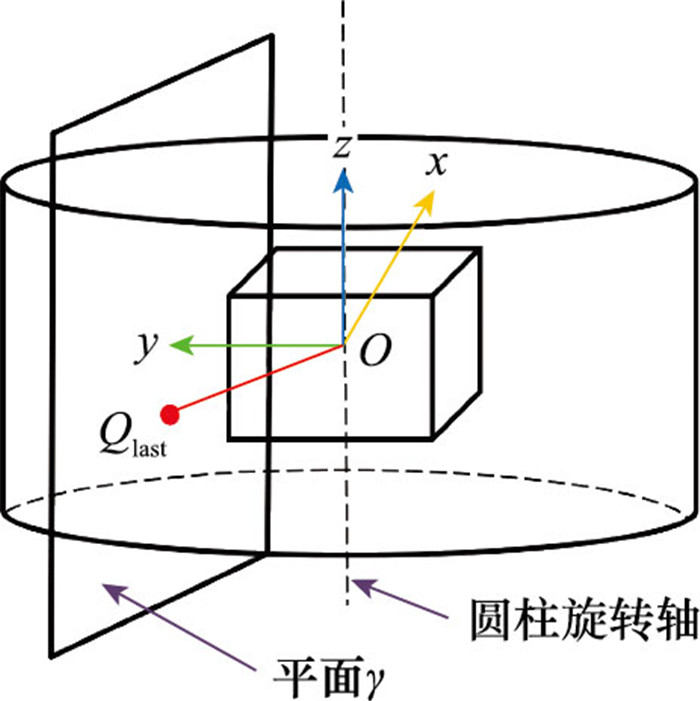
图8
避障运动规划步骤3"
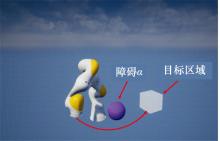
图9
实验1示意图"
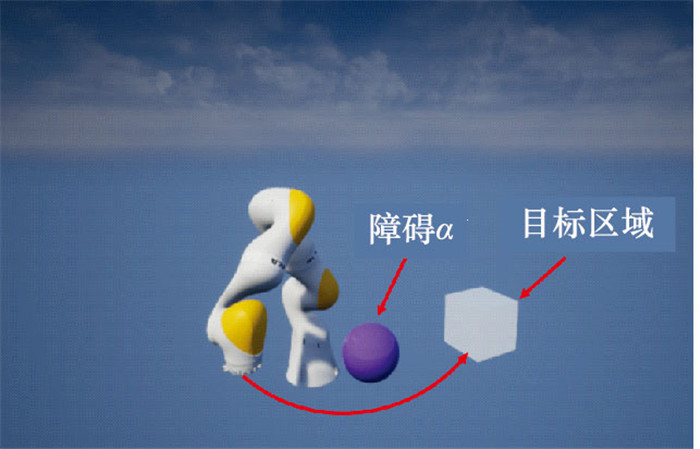

图10
实验1 a组实验流程"
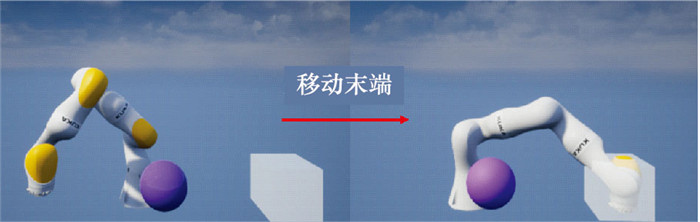
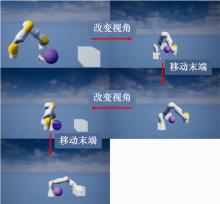
图11
实验1 b组实验流程"
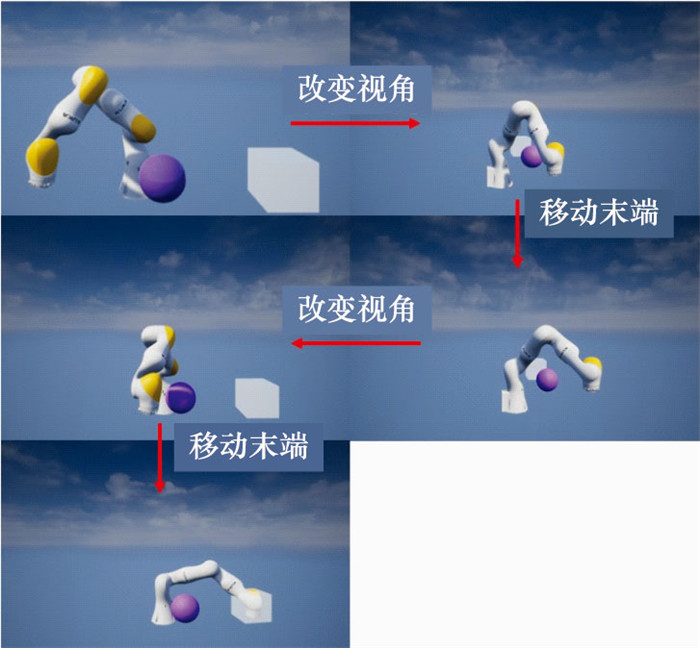
表1
实验1数据"
| 序号 | a组实验完成时间/s | a组避障情况 | b组实验完成时间/s | b组避障情况 |
| 1 | 2.33 | 未碰撞 | 10.15 | 未碰撞 |
| 2 | 2.20 | 未碰撞 | 11.16 | 未碰撞 |
| 3 | 1.79 | 未碰撞 | 9.72 | 未碰撞 |
| 4 | 1.83 | 未碰撞 | 11.49 | 未碰撞 |
| 5 | 2.18 | 未碰撞 | 14.11 | 未碰撞 |
| 6 | 1.68 | 未碰撞 | 10.26 | 未碰撞 |
| 7 | 1.49 | 未碰撞 | 11.78 | 未碰撞 |
| 8 | 2.02 | 未碰撞 | 13.69 | 碰撞 |
| 9 | 1.70 | 未碰撞 | 10.00 | 碰撞 |
| 10 | 1.53 | 未碰撞 | 11.50 | 未碰撞 |
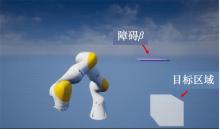
图12
实验2示意"
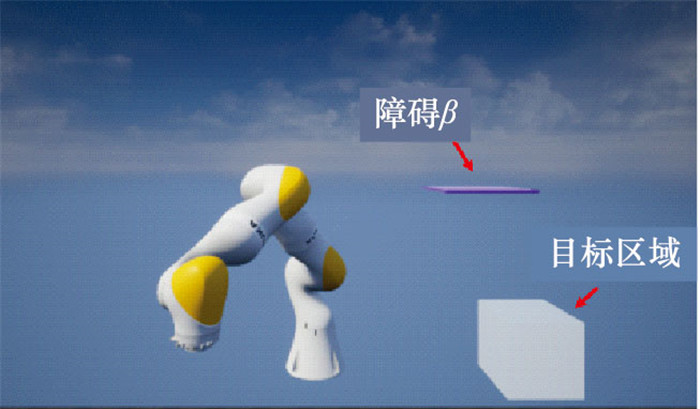
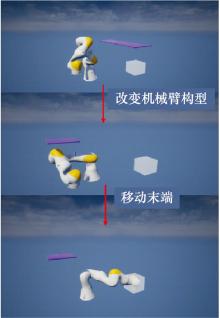
图13
实验2过程"
| 1 |
OTT C , DIETRICH A , ALBU-SCHÄFFER A . Prioritized multi-task compliance control of redundant manipulators[J]. Automatica, 2015, 53, 416- 423.
doi: 10.1016/j.automatica.2015.01.015 |
| 2 | OTT C, KUGI A, NAKAMURA Y. Resolving the problem of non-integrability of nullspace velocities for compliance control of redundant manipulators by using semi-definite Lyapunov functions[C]// Proc. of the IEEE International Conference on Robotics and Automation, 2008: 1999-2004. |
| 3 | DIETRICH A , OTT C . Hierarchical impedance-based tracking control of kinematically redundant robots[J]. IEEE Trans.on Robotics, 2019, 36 (1): 204- 221. |
| 4 |
KAVRAKI L E , SVESTKA P , LATOMBE J C , et al. Probabilistic roadmaps for path planning in high-dimensional configuration spaces[J]. IEEE Trans.on Robotics and Automation, 1996, 12 (4): 566- 580.
doi: 10.1109/70.508439 |
| 5 |
CHEN G , LUO N , LIU D , et al. Path planning for manipulators based on an improved probabilistic roadmap method[J]. Robotics and Computer -Integrated Manufacturing, 2021, 72, 102196.
doi: 10.1016/j.rcim.2021.102196 |
| 6 | BRY A, ROY N. Rapidly-exploring random belief trees for motion planning under uncertainty[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2011: 723-730. |
| 7 | LAI T, RAMOS F, FRANCIS G. Balancing global exploration and local-connectivity exploitation with rapidly-exploring random disjointed-trees[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2019: 5537-5543. |
| 8 | KUFFNER J J, LAVALLE S M. RRT-connect: an efficient approach to single-query path planning[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2000, 2: 995-1001. |
| 9 | MORIKAWA S, SENOO T, NAMIKI A, et al. Realtime collision avoidance using a robot manipulator with light-weight small high-speed vision systems[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2007: 794-799. |
| 10 | KRUSE D , WEN J T , RADKE R J . A sensor-based dual-arm tele-robotic system[J]. IEEE Trans.on Automation Science and Engineering, 2014, 12 (1): 4- 18. |
| 11 | FRITZSCHE M, ELKMANN N, SCHULENBURG E. Tactile sensing: a key technology for safe physical human robot interaction[C]//Proc. of the 6th International Conference on Human-robot Interaction, 2011: 139-140. |
| 12 |
GARCÍA J G , ROBERTSSON A , ORTEGA J G , et al. Sensor fusion for compliant robot motion control[J]. IEEE Trans.on Robotics, 2008, 24 (2): 430- 441.
doi: 10.1109/TRO.2008.918057 |
| 13 |
LUMELSKY V J , CHEUNG E . Real-time collision avoidance in teleoperated whole-sensitive robot arm manipulators[J]. IEEE Trans.on Systems, Man, and Cybernetics, 1993, 23 (1): 194- 203.
doi: 10.1109/21.214777 |
| 14 |
BOUTRY C M , NEGRE M , JORDA M , et al. A hierarchically patterned, bioinspired e-skin able to detect the direction of applied pressure for robotics[J]. Science Robotics, 2018, 3 (24): eaau6914.
doi: 10.1126/scirobotics.aau6914 |
| 15 |
王晓华, 傅卫平. 一种新的自主移动机器人主动式SLAM算法[J]. 系统工程与电子技术, 2012, 34 (11): 2334- 2338.
doi: 10.3969/j.issn.1001-506X.2012.11.25 |
|
WANG X H , FU W P . New active SLAM algorithm for auto-nomous mobile robot[J]. Systems Engineering and Electronics, 2012, 34 (11): 2334- 2338.
doi: 10.3969/j.issn.1001-506X.2012.11.25 |
|
| 16 | 张凤军, 戴国忠, 彭晓兰. 虚拟现实的人机交互综述[J]. 中国科学: 信息科学, 2016, 46 (12): 1711- 1736. |
| ZHANG F J , DAI G Z , PENG X L . A survey on human-computer interaction in virtual reality[J]. Scientia Sinica Informationis, 2016, 46 (12): 1711- 1736. | |
| 17 | 刘正雄, 司继康, 陈刚, 等. 面向遥操作手眼协调的虚拟仿真交互控制方法[J]. 系统工程与电子技术, 2020, 42 (5): 1146- 1151. |
| LIU Z X , SI J K , CHEN G , et al. Interaction control method of virtual simulation for hand-eye coordination in teleoperation[J]. Systems Engineering and Electronics, 2020, 42 (5): 1146- 1151. | |
| 18 |
倪得晶, 宋爱国, 李会军. 基于虚拟现实的机器人遥操作关键技术研究[J]. 仪器仪表学报, 2017, 38 (10): 2351- 2363.
doi: 10.3969/j.issn.0254-3087.2017.10.001 |
|
NI D J , SONG A G , LI H J . Survey on robot teleoperation based on virtual reality[J]. Chinese Journal of Scientific Instrument, 2017, 38 (10): 2351- 2363.
doi: 10.3969/j.issn.0254-3087.2017.10.001 |
|
| 19 | KUO C Y , HUANG C C , TSAI C H , et al. Development of an immersive SLAM-based VR system for teleoperation of a mobile manipulator in an unknown environment[J]. Computers in Industry, 2021, 132, 103502. |
| 20 |
SU Y P , CHEN X Q , ZHOU T , et al. Mixed reality-enhanced intuitive teleoperation with hybrid virtual fixtures for intelligent robotic welding[J]. Applied Sciences, 2021, 11 (23): 11280.
doi: 10.3390/app112311280 |
| 21 | REBELO J , SEDNAOUI T , DEN EXTER E B , et al. Bilateral robot teleoperation: a wearable arm exoskeleton featuring an intuitive user interface[J]. IEEE Robotics & Automation Magazine, 2014, 21 (4): 62- 69. |
| 22 |
ROLDÁN J J , PEÑA-TAPIA E , MARTÍN-BARRIO A , et al. Multi-robot interfaces and operator situational awareness: study of the impact of immersion and prediction[J]. Sensors, 2017, 17 (8): 1720.
doi: 10.3390/s17081720 |
| 23 |
王德鑫, 张茂军, 熊志辉. 多重触控技术研究综述[J]. 计算机应用研究, 2009, 26 (7): 2404-2406, 2410.
doi: 10.3969/j.issn.1001-3695.2009.07.002 |
|
WANG D X , ZHANG M J , XIONG Z H . Survey on multi-touch research[J]. Application Research of Computers, 2009, 26 (7): 2404-2406, 2410.
doi: 10.3969/j.issn.1001-3695.2009.07.002 |
|
| 24 | 袁庆曙, 王若楠, 潘志庚, 等. 空间增强现实中的人机交互技术综述[J]. 计算机辅助设计与图形学报, 2021, 33 (3): 321- 332. |
| YUAN Q S , WANG R N , PAN Z G , et al. A survey on human-computer interaction in spatial augmented reality[J]. Journal of Computer-Aided Design & Computer Graphics, 2021, 33 (3): 321- 332. | |
| 25 | 张琦. 面向人机交互的冗余机械臂智能规划技术研究[D]. 西安: 西北工业大学, 2021. |
| ZHANG Q. Research on intelligent planning technology of redundant manipulators for human-robot interaction[D]. Xi'an: Northwestern Polytechnical University, 2021. | |
| 26 | SHE Y, XU W F, WANG Z Y, et al. Inverse kinematics of SSRMS-type manipulators with single joint locked failure[C]//Proc. of the IEEE International Conference on Robotics and Biomimetics, 2013: 7-12. |
| 27 |
FARIA C , FERREIRA F , ERLHAGEN W , et al. Position-based kinematics for 7-DoF serial manipulators with global configuration control, joint limit and singularity avoidance[J]. Mechanism and Machine Theory, 2018, 121, 317- 334.
doi: 10.1016/j.mechmachtheory.2017.10.025 |
| 28 | SHIMIZU M , KAKUYA H , YOON W K , et al. Analytical inverse kinematic computation for 7-DOF redundant manipulators with joint limits and its application to redundancy resolution[J]. IEEE Trans.on Robotics, 2008, 24 (5): 1131- 1142. |
| 29 | 赵京, 龚世秋, 张自强. 7自由度拟人臂仿人运动的逆运动学解析解[J]. 机械工程学报, 2018, 54 (21): 25- 32. |
| ZHAO J , GONG S Q , ZHANG Z Q . Analytical inverse kinematics of anthropomorphic movements for 7-DOF humanoid manipulators[J]. Journal of Mechanical Engineering, 2018, 54 (21): 25- 32. | |
| 30 | KREUTZ-DELGADO K , LONG M , SERAJI H . Kinematic analysis of 7-DOF manipulators[J]. The International Journal of Robotics Research, 1992, 11 (5): 469- 481. |
| [1] | 胡涛, 申立群, 田宇阳, 董伟锋. 航天复杂系统测发控流程仿真引擎设计与评价[J]. 系统工程与电子技术, 2023, 45(12): 3866-3874. |
| [2] | 高山, 智永锋, 张普, 左轩. 基于改进灰色关联分析的航天产品性能样机仿真结果一致性验证方法[J]. 系统工程与电子技术, 2023, 45(9): 2777-2783. |
| [3] | 任浩亮, 张建超, 程会川. 基于SysML的武器装备体系能力需求建模分析方法[J]. 系统工程与电子技术, 2023, 45(9): 2843-2851. |
| [4] | 黄炎焱, 王凯生, 史宇昂. 基于网络化指标的数据链作战保障能力评估模型研究[J]. 系统工程与电子技术, 2023, 45(8): 2361-2369. |
| [5] | 杨帆, 马萍, 李伟, 杨明. 基于孪生网络的仿真模型智能排序评估方法[J]. 系统工程与电子技术, 2023, 45(7): 2060-2068. |
| [6] | 吴诗辉, 周宇, 李正欣, 刘晓东, 贺波. 基于神经网络的时变参数系统仿真优化方法[J]. 系统工程与电子技术, 2023, 45(2): 472-480. |
| [7] | 张伟, 何晶, 谢晓伟, 赵国强, 陈真. 联合战场导航对抗仿真评估系统设计与实现[J]. 系统工程与电子技术, 2022, 44(10): 3182-3189. |
| [8] | 马骏, 杨镜宇, 吴曦. 基于预聚类主动半监督的作战体系效能评估[J]. 系统工程与电子技术, 2022, 44(6): 1889-1896. |
| [9] | 任璐英, 王庆国, 马倩, 张海峰, 徐卫卫. 基于元模型的复杂产品虚拟样机建模方法研究[J]. 系统工程与电子技术, 2022, 44(5): 1609-1614. |
| [10] | 张源原, 高阳, 朱鹏, 刘锦涛, 谷树山. 基于着色Petri网的无人机侦察战术规划[J]. 系统工程与电子技术, 2022, 44(3): 900-907. |
| [11] | 鲁统亮, 陈文豪, 葛冰峰, 邓祁零. 信息支援下的作战体系多层网络建模[J]. 系统工程与电子技术, 2022, 44(2): 520-528. |
| [12] | 冯克涛, 李晓毅, 曲晨, 王申涛, 陈谋. 基于DEM的民航地空VHF通信有效覆盖仿真研究[J]. 系统工程与电子技术, 2022, 44(2): 684-695. |
| [13] | 马骏, 杨镜宇, 邹立岩. 基于Stacking集成元模型的作战体系能力图谱生成方法[J]. 系统工程与电子技术, 2022, 44(1): 154-163. |
| [14] | 刘紫燕, 马珊珊, 梁静, 朱明成, 袁磊. 注意力机制CNN的毫米波大规模MIMO系统信道估计算法[J]. 系统工程与电子技术, 2022, 44(1): 307-312. |
| [15] | 曾广迅, 龚光红, 李妮. 基于语义匹配的作战体系仿真想定生成方法[J]. 系统工程与电子技术, 2021, 43(8): 2154-2162. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||