
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (11): 3624-3631.doi: 10.12305/j.issn.1001-506X.2023.11.30
靳凯迪1, 柴洪洲1,*, 宿楚涵2, 向民志1, 李明1
收稿日期:2022-05-26
出版日期:2023-10-25
发布日期:2023-10-31
通讯作者:
柴洪洲
作者简介:靳凯迪(1997—), 男, 博士研究生, 主要研究方向为水下无人航行器自主定位理论与方法基金资助:Kaidi JIN1, Hongzhou CHAI1,*, Chuhan SU2, Minzhi XIANG1, Ming LI1
Received:2022-05-26
Online:2023-10-25
Published:2023-10-31
Contact:
Hongzhou CHAI
摘要:
针对捷联惯性导航系统(strapdown inertial navigation system, SINS)误差定义存在的坐标系不一致的问题, 将速度误差统一投影在真实导航坐标系中, 基于状态变换Kalman滤波推导了更严密的SINS姿态、速度和位置误差方程。进一步地, 在新定义的速度误差和SINS误差方程的基础上, 构建了改进的多普勒计程仪(Doppler velocity logger, DVL)/SINS组合导航卡尔曼滤波状态模型和量测模型。仿真和船载实验表明, 与常规DVL/SINS卡尔曼滤波模型相比, 所提算法可以处理传统DVL/SINS误差模型中坐标系不一致问题的影响, 可在一定程度上提高组合导航系统的性能。
中图分类号:
靳凯迪, 柴洪洲, 宿楚涵, 向民志, 李明. 基于状态变换卡尔曼滤波的DVL/SINS组合导航算法[J]. 系统工程与电子技术, 2023, 45(11): 3624-3631.
Kaidi JIN, Hongzhou CHAI, Chuhan SU, Minzhi XIANG, Ming LI. State transformation Kalman filter for DVL/SINS integral navigation system[J]. Systems Engineering and Electronics, 2023, 45(11): 3624-3631.
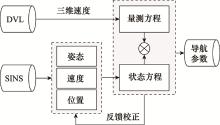
图1
DVL/SINS组合导航数据融合过程"
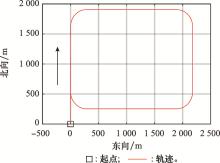
图2
UUV仿真轨迹"
表1
仿真轨迹运动状态"
| 运动状态 | 数值 | 数据区间/s |
| 加速 | 1 m/s2 | 0-10、301-306、667-672 |
| -1 m/s2 | 286-291、652-657、795-800 | |
| 匀速 | 10 m/s | 10-163、216-286、306-376、429-529、582-652、672-742 |
| 5 m/s | 291-301、657-667 | |
| 横滚 | 0.5°/s | 163-167、376-380、529-533、742-746 |
| -0.5°/s | 212-216、425-429、578-582、791-795 | |
| 转向 | 2°/s | 167-212、380-425、533-578、746-791 |
图3
天向失准角平均值"
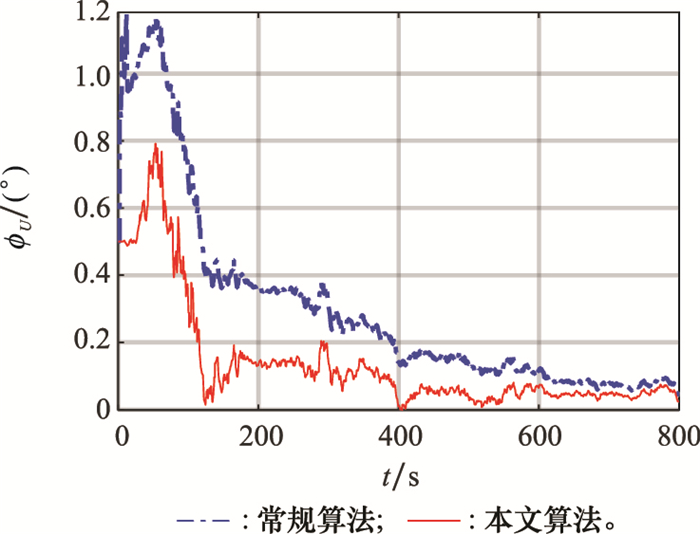

图4
速度平均误差"
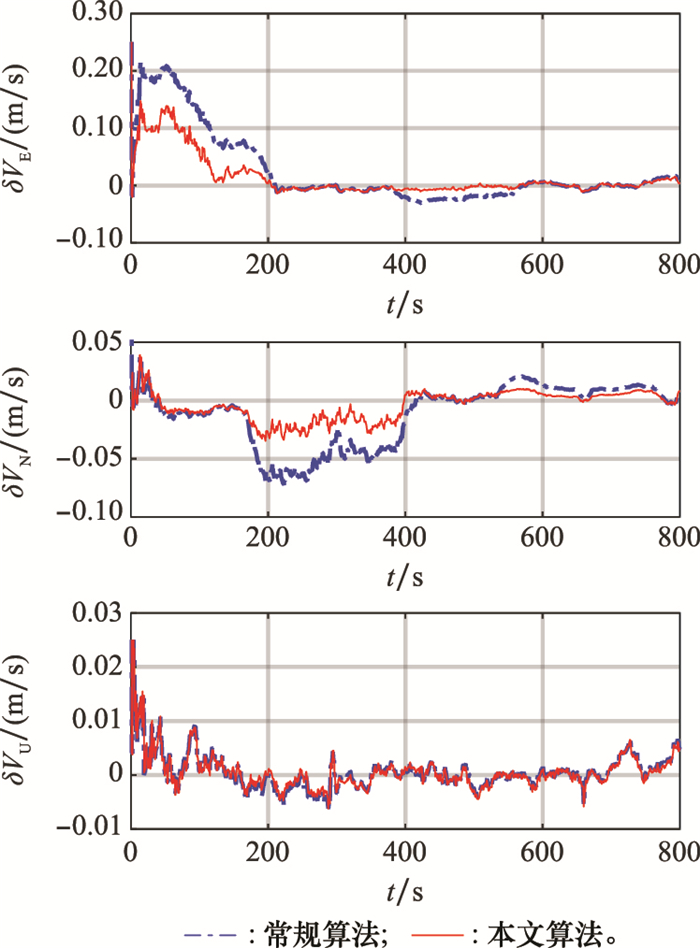

图5
位置平均误差"
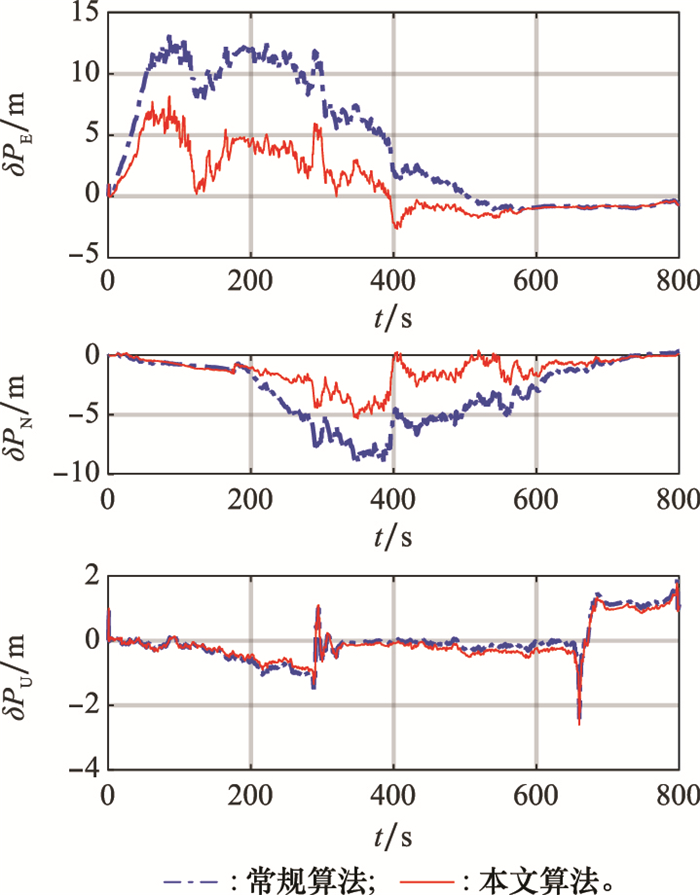
图6
DVL刻度系数平均值"
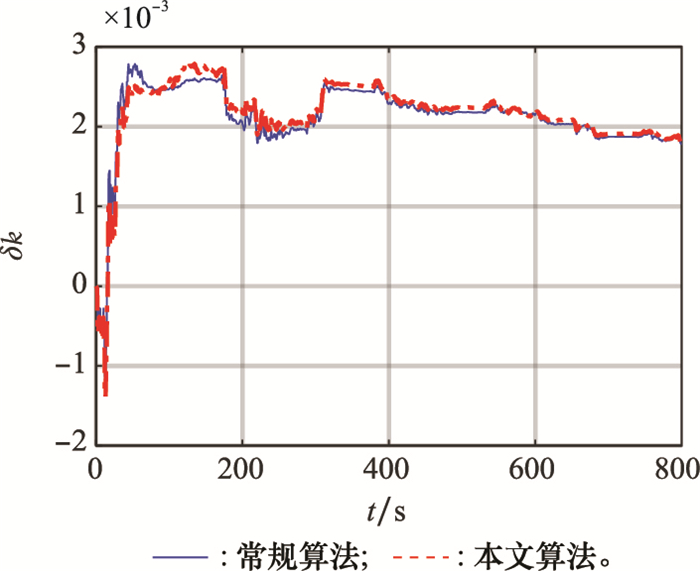
图7
DVL安装偏差角平均值"
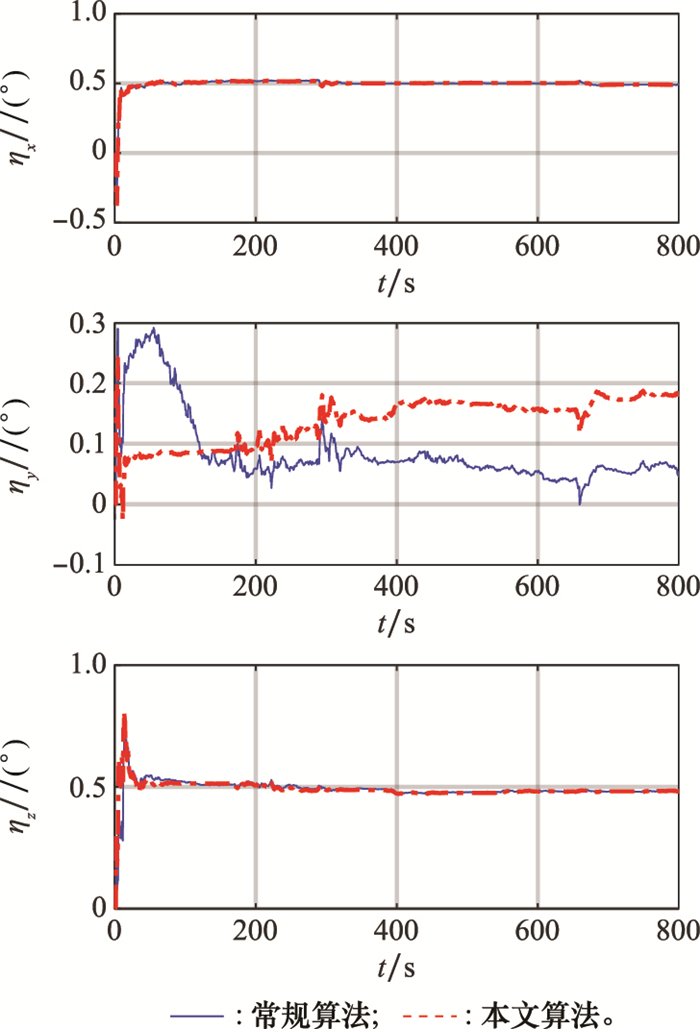

图8
DVL杆臂误差平均值"
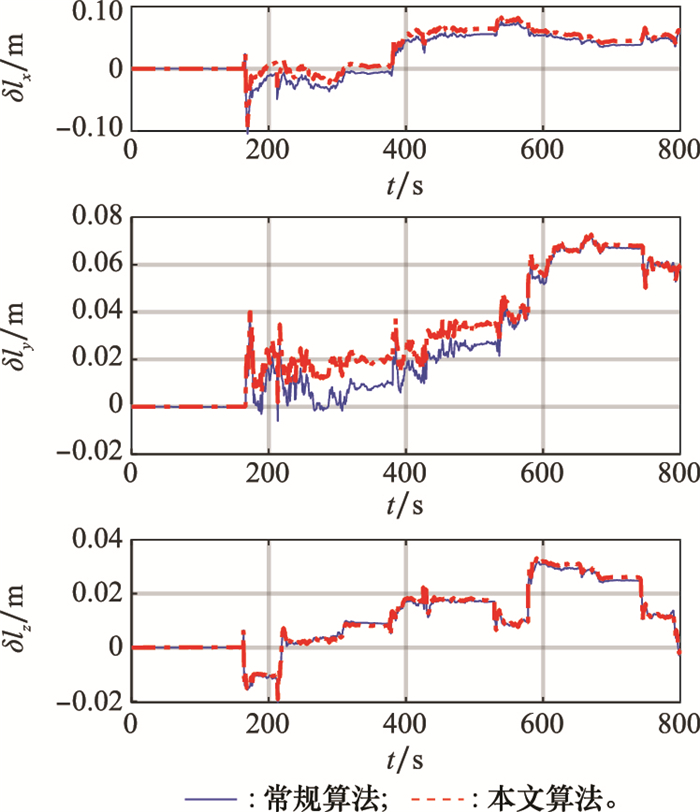
图9
船载平台及设备"
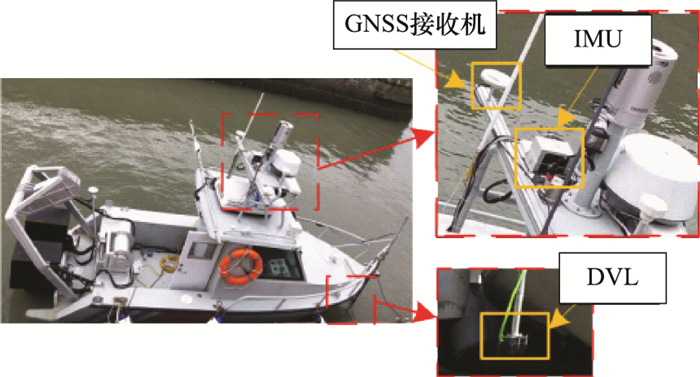

图10
武汉湖试轨迹"

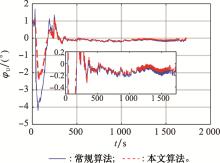
图11
湖试中的天向失准角"
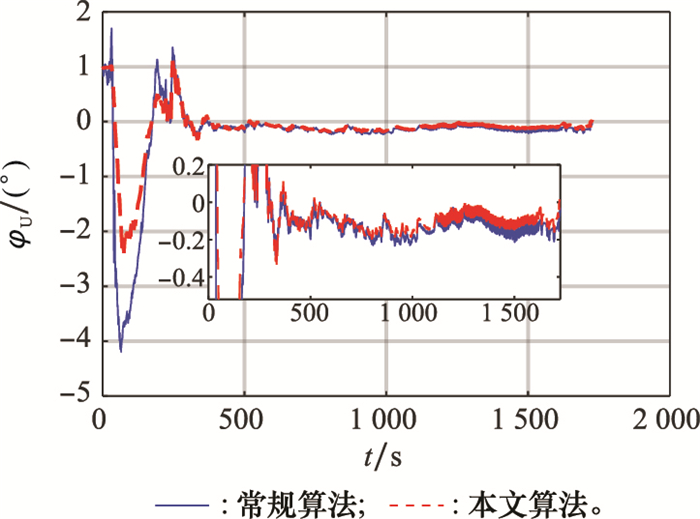

图12
湖试中的速度误差"
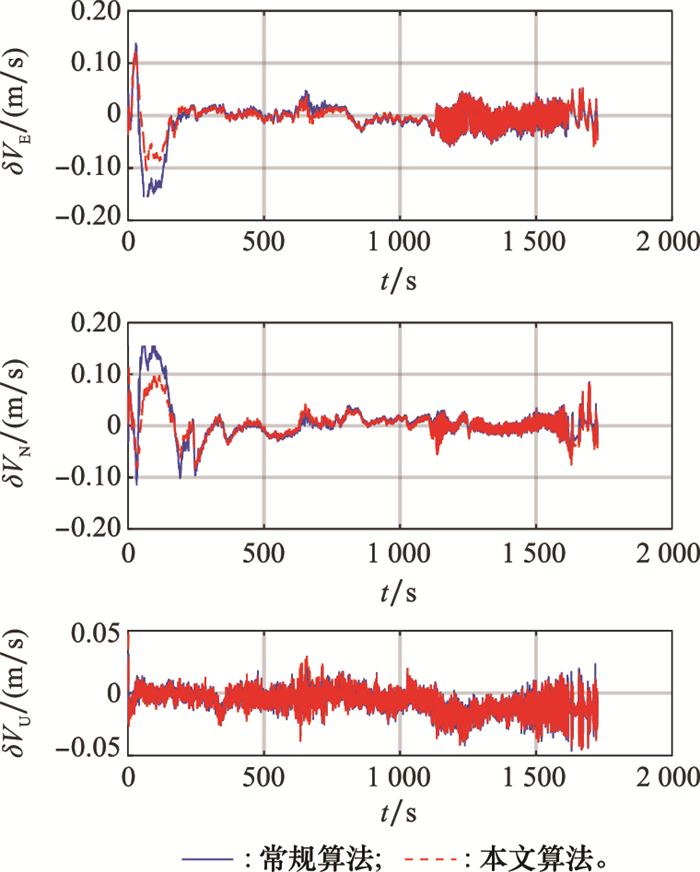
图13
湖试中的位置误差"
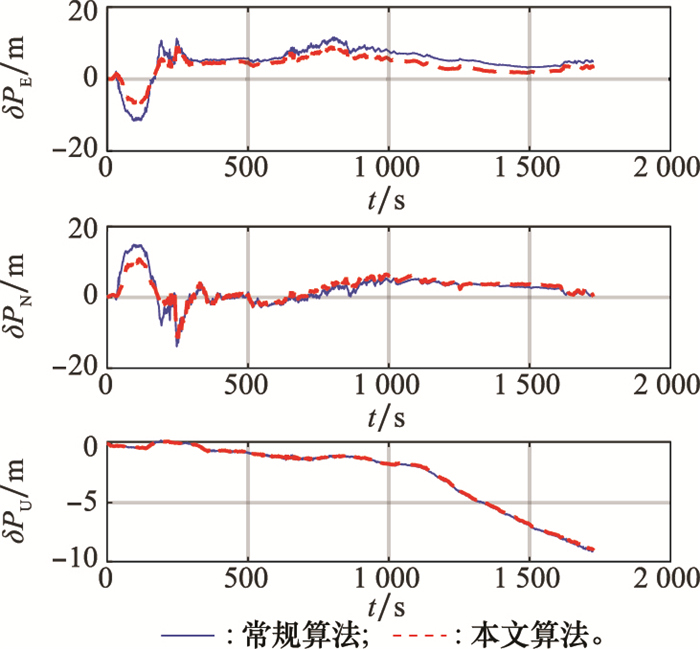
表2
湖试中导航参数RMSE统计结果"
| 方案 | 失准角/(′) | 速度误差/(m/s) | 位置误差/m | ||||||||
| E | N | U | E | N | U | E | N | U | |||
| 常规算法 | 0.025 | 0.015 | 0.823 | 0.037 | 0.038 | 0.010 | 6.525 | 4.454 | 3.795 | ||
| 本文算法 | 0.025 | 0.014 | 0.469 | 0.024 | 0.026 | 0.010 | 4.662 | 4.028 | 3.737 | ||
| 1 |
PANDA J P , MITRA A , WARRIOR H V . A review on the hydrodynamic characteristics of autonomous underwater vehicles[J]. Proceedings of the Institution of Mechanical Engineers Part M-journal of Engineering for the Maritime Environment, 2021, 235 (1): 15- 29.
doi: 10.1177/1475090220936896 |
| 2 |
FU Q W , LIU Y , LIU Z B , et al. Autonomous in-motion alignment for land vehicle strapdown inertial navigation system without the aid of external sensors[J]. Journal of Navigation, 2018, 71 (6): 1312- 1328.
doi: 10.1017/S0373463318000437 |
| 3 |
LI W L , TANG K H , LU L Q , et al. Optimization-based INS in-motion alignment approach for underwater vehicles[J]. Optik, 2013, 124 (20): 4581- 4585.
doi: 10.1016/j.ijleo.2013.01.069 |
| 4 |
BERNELTE P J , PAPAELIAS M , GARCIA F P . Autonomous underwater vehicles: instrumentation and measurements[J]. IEEE Instrumentation and Measurement Magazine, 2020, 23 (2): 105- 114.
doi: 10.1109/MIM.2020.9062680 |
| 5 |
靳凯迪, 柴洪洲, 宿楚涵, 等. DVL/SINS组合导航技术发展现状及趋势[J]. 导航定位学报, 2022, 10 (2): 1-12, 92.
doi: 10.16547/j.cnki.10-1096.20220201 |
|
JIN K D , CHAI H Z , SU C H , et al. Research status and trends of DVL/SINS integrated navigation technology[J]. Journal of Navigation and Positioning, 2022, 10 (2): 1-12, 92.
doi: 10.16547/j.cnki.10-1096.20220201 |
|
| 6 |
ZHANG T W , TANG J L , QIN S J , et al. Review of navigation and positioning of deep-sea manned submersibles[J]. Journal of Navigation, 2019, 72 (4): 1021- 1034.
doi: 10.1017/S0373463319000080 |
| 7 |
RAHIMI H , NIKKHAH A , HOOSHMANDI K . A fast alignment of marine strapdown inertial navigation system based on adaptive unscented Kalman filter[J]. Trans.of the Institute of Measurement and Control, 2021, 43 (4): 749- 758.
doi: 10.1177/0142331220934293 |
| 8 | YOO T , KIM M , YOON S , et al. Performance enhancement for conventional tightly coupled INS/DVL navigation system using regeneration of partial DVL measurements[J]. Journal of Sensors, 2020, 5324349. |
| 9 |
LIU P J , WANG B , DENG Z H , et al. INS/DVL/PS tightly coupled underwater navigation method with limited DVL measurements[J]. IEEE Sensors Journal, 2018, 18 (7): 2994- 3002.
doi: 10.1109/JSEN.2018.2800165 |
| 10 | LIU S D , ZHANG T , ZHANG J Y , et al. A new coupled method of SINS/DVL integrated navigation based on improved dual adaptive factors[J]. IEEE Trans.on Instrumentation and Measurement, 2021, 70, 8504211. |
| 11 |
WANG D , XU X S , YAO Y Q , et al. A novel SINS/DVL tightly integrated navigation method for complex environment[J]. IEEE Trans.on Instrumentation and Measurement, 2020, 69 (7): 5183- 5196.
doi: 10.1109/TIM.2019.2955187 |
| 12 |
JIN K D , CHAI H Z , SU C H , et al. A compensation algorithm with motion constraint in DVL/SINS tightly coupled positioning[J]. Marine Geodesy, 2022, 45 (4): 380- 406.
doi: 10.1080/01490419.2022.2040662 |
| 13 | ALIAN M , LUIS H , HICHEM S , et al. Model-aided navigation with sea current estimation for an autonomous underwater vehicle[J]. International Journal of Advanced Robotic Systems, 2015, |
| 14 |
徐晓苏, 潘永飞, 邹海军. 基于自适应滤波的SINS/DVL组合导航系统[J]. 华中科技大学学报(自然科学版), 2015, 43 (3): 95-99, 106.
doi: 10.13245/j.hust.150319 |
|
XU X S , PAN Y F , ZOU H J . SINS/DVL integrated navigation system based on adaptive filtering[J]. Journal of Huazhong University of Science and Technology (Nature Science Edition), 2015, 43 (3): 95-99, 106.
doi: 10.13245/j.hust.150319 |
|
| 15 | SHI W C , XU J N , HE H Y , et al. Fault-tolerant SINS/HSB/DVL underwater integrated navigation system based on variational Bayesian robust adaptive Kalman filter and adaptive information sharing factor[J]. Measurement, 2022, 196 (23): 111225- 111234. |
| 16 |
LI K L , CHANG L B , HU B Q , et al. A variational Bayesian-based unscented Kalman filter with both adaptivity and robustness[J]. IEEE Sensors Journal, 2016, 16 (18): 6966- 6976.
doi: 10.1109/JSEN.2016.2591260 |
| 17 |
LI K L , LU X , LI W K , et al. Nonlinear error model based on quaternion for the INS: analysis and comparison[J]. IEEE Trans.on Vehicular Technology, 2021, 70 (1): 263- 272.
doi: 10.1109/TVT.2020.3046680 |
| 18 |
ZHU T G , LIU Y , LI W K , et al. The quaternion-based attitude error for the nonlinear error model of the INS[J]. IEEE Sensors Journal, 2021, 21 (22): 25782- 25795.
doi: 10.1109/JSEN.2021.3118039 |
| 19 |
ANDRLE M S , CRASSIDIS J L . Attitude estimation employing common frame error representations[J]. Journal of Gui-dance, Control, and Dynamics, 2015, 38 (9): 1614- 1624.
doi: 10.2514/1.G001025 |
| 20 |
WANG M S , WU W Q , ZHOU P Y , et al. State transformation extended Kalman filter for GPS/SINS tightly coupled integration[J]. GPS Solutions, 2018, 22 (4): 112.
doi: 10.1007/s10291-018-0773-3 |
| 21 |
WANG M S , WU W Q , HE X F , et al. Consistent ST-EKF for long distance land vehicle navigation based on SINS/OD integration[J]. IEEE Trans.on Vehicular Technology, 2019, 68 (11): 10525- 10534.
doi: 10.1109/TVT.2019.2939679 |
| 22 | WANG M S , ZHAO Q C , WU W Q , et al. State transformation multi-state constraint Kalman filter for visual-inertial integrated navigation[J]. Journal of Chinese Inertial Technology, 2021, 29 (2): 199- 207. |
| 23 |
王茂松, 吴文启, 何晓峰, 等. 状态变换卡尔曼滤波的进一步解释及应用[J]. 中国惯性技术学报, 2019, 27 (4): 499-504, 509.
doi: 10.13695/j.cnki.12-1222/o3.2019.04.013 |
|
WANG M S , WU W Q , HE X F , et al. Further explanation and application of state transformation extended Kalman filter[J]. Journal of Chinese Inertial Technology, 2019, 27 (4): 499-504, 509.
doi: 10.13695/j.cnki.12-1222/o3.2019.04.013 |
|
| 24 |
CHANG L B , QIN F J , JIANG S . Strapdown inertial navigation system initial alignment based on modified process model[J]. IEEE Sensors Journal, 2019, 19 (15): 6381- 6391.
doi: 10.1109/JSEN.2019.2910213 |
| 25 | 赵仁杰, 李开龙, 胡柏青, 等. 基于改进四元数阻尼误差模型的SINS初始对准算法[J]. 系统工程与电子技术, 2021, 43 (11): 3330- 3337. |
| ZHAO R J , LI K L , HU B Q , et al. SINS initial alignment algorithm based on improved quaternion damping error model[J]. Systems Engineering and Electronics, 2021, 43 (11): 3330- 3337. | |
| 26 |
KLEIN I , DIAMANT R . Observability analysis of heading aided INS for a maneuvering UUV[J]. Navigation, 2018, 65 (1): 73- 82.
doi: 10.1002/navi.222 |
| 27 | 严恭敏, 邓瑀. 传统组合导航中的实用Kalman滤波技术评述[J]. 导航定位与授时, 2020, 7 (2): 50- 64. |
| YAN G M , DENG Y . Review on practical Kalman filtering techniques in traditional integrated navigation system[J]. Navigation Positioning and Timing, 2020, 7 (2): 50- 64. | |
| 28 | 陈建华, 朱海, 王超, 等. 水下SINS/DVL紧组合导航算法[J]. 海军工程大学学报, 2017, 29 (2): 108- 112. |
| CHEN J H , ZHU H , WANG C , et al. Underwater SINS/DVL tightly integrated navigation algorithm[J]. Journal of Naval University of Engineering, 2017, 29 (2): 108- 112. | |
| 29 |
TAL A , KLEIN I , KATZ R . Inertial navigation system/Doppler velocity log (INS/DVL) fusion with partial DVL measurements[J]. Sensors, 2017, 17 (2): 415- 434.
doi: 10.3390/s17020415 |
| 30 |
LI W L , ZHANG L D , SUN F P , et al. Alignment calibration of IMU and Doppler sensors for precision INS/DVL integrated navigation[J]. Optik, 2015, 126 (23): 3872- 3876.
doi: 10.1016/j.ijleo.2015.07.187 |
| [1] | 王希彬, 戴洪德, 全闻捷, 王瑞, 贾临生. 基于加速度补偿的惯性行人导航非零速区间姿态估计CKF算法[J]. 系统工程与电子技术, 2023, 45(9): 2894-2901. |
| [2] | 戴洪德, 马宇峰, 戴邵武, 郑百东, 张笑宇. 航向误差非线性预测的惯性行人导航零速修正算法[J]. 系统工程与电子技术, 2023, 45(8): 2555-2561. |
| [3] | 薛海建, 王涛, 蔡星会, 王金涛, 江英. 里程计辅助的车载SINS行进间对准方法[J]. 系统工程与电子技术, 2023, 45(6): 1805-1813. |
| [4] | 戴礼灿, 刘欣, 张海瀛, 代翔, 王成刚. 基于卡尔曼滤波算法展开的飞行目标轨迹预测[J]. 系统工程与电子技术, 2023, 45(6): 1814-1820. |
| [5] | 何益康, 张文瀚, 王振华, 何闻. 用于卫星应急恢复的太阳电池阵转角估计方法[J]. 系统工程与电子技术, 2023, 45(3): 797-805. |
| [6] | 唐洪琼, 许江宁, 史文策, 何泓洋, 李方能. 基于位置观测信息的Davenport四元数DVL标定方法[J]. 系统工程与电子技术, 2023, 45(11): 3640-3648. |
| [7] | 朱天高, 刘勇, 李开龙, 赵仁杰. 基于欧拉角的李群捷联惯导误差模型分析与比较研究[J]. 系统工程与电子技术, 2023, 45(10): 3265-3273. |
| [8] | 高利春, 高铭阳, 陈晓芳, 饶建兵, 费泽松, 倪少杰. 基于SINS/GBAS组合导航的高精度进近着陆导航技术[J]. 系统工程与电子技术, 2023, 45(1): 210-220. |
| [9] | 穆静, 严东升, 蔡远利, 王长元. 基于Masreliez-Martin的鲁棒分数阶容积卡尔曼滤波算法及应用[J]. 系统工程与电子技术, 2023, 45(1): 234-240. |
| [10] | 姜颖颖, 潘树国, 叶飞, 高旺, 马春, 王浩. 基于抗差估计和改进AIME的缓变故障检测方法[J]. 系统工程与电子技术, 2022, 44(9): 2894-2902. |
| [11] | 徐庚, 何永旭, 张勇刚. 基于罗德里格斯参数的惯性系传递对准算法[J]. 系统工程与电子技术, 2022, 44(9): 2903-2913. |
| [12] | 史浩然, 卢发兴, 祁江鑫, 杨光. 基于辅助信标的无人机协同目标跟踪[J]. 系统工程与电子技术, 2022, 44(7): 2302-2310. |
| [13] | 翟光, 王妍欣, 孙一勇. 基于低轨星网的多目标协同跟踪滤波技术[J]. 系统工程与电子技术, 2022, 44(6): 1957-1967. |
| [14] | 董一平, 刘宁, 苏中, 王靖骁, 白宏阳. 基于AEKF的高速自旋飞行体组合导航方法[J]. 系统工程与电子技术, 2022, 44(6): 1977-1983. |
| [15] | 李文华, 汪立新, 沈强, 李灿, 吴宗收. 基于鲁棒EKF的MEMS-INS/GNSS/VO组合导航方法[J]. 系统工程与电子技术, 2022, 44(6): 1994-2000. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||