
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (10): 3207-3217.doi: 10.12305/j.issn.1001-506X.2023.10.25
• 制导、导航与控制 • 上一篇
闫莉萍1,*, 李程伟1, 徐柏凯1, 夏元清1, 肖波2
收稿日期:2022-08-17
出版日期:2023-09-25
发布日期:2023-10-11
通讯作者:
闫莉萍
作者简介:闫莉萍(1979—), 女, 教授, 博士, 主要研究方向为数据融合、故障诊断、目标跟踪、组合导航与智能导航基金资助:Liping YAN1,*, Chengwei LI1, Bokai XU1, Yuanqing XIA1, Bo XIAO2
Received:2022-08-17
Online:2023-09-25
Published:2023-10-11
Contact:
Liping YAN
摘要:
针对传统的仅依赖点特征的视觉里程计鲁棒性较差的问题,提出了一种结合点特征、线特征以及结构特征的视觉-惯性里程计。结构特征是一个满足曼哈顿世界假设的正交基, 可用于描述结构物体包含的平行与正交信息。结构特征的引入为视觉惯性里程计提供了一个全局的约束, 可有效减少旋转误差的累计。与此同时, 为了保证引入结构特征后系统的实时性, 基于线特征匹配关系以及重力方向, 提出了一种鲁棒且高效的结构特征提取算法。实验结果表明, 相比现有的开源系统, 所提出的系统在保证实时性的同时, 有效减少了旋转累计误差。
中图分类号:
闫莉萍, 李程伟, 徐柏凯, 夏元清, 肖波. 一种基于结构特征的单目视觉惯性里程计[J]. 系统工程与电子技术, 2023, 45(10): 3207-3217.
Liping YAN, Chengwei LI, Bokai XU, Yuanqing XIA, Bo XIAO. A monocular visual inertial odometry based on structural features[J]. Systems Engineering and Electronics, 2023, 45(10): 3207-3217.

图1
基于结构特征的VIO框架"
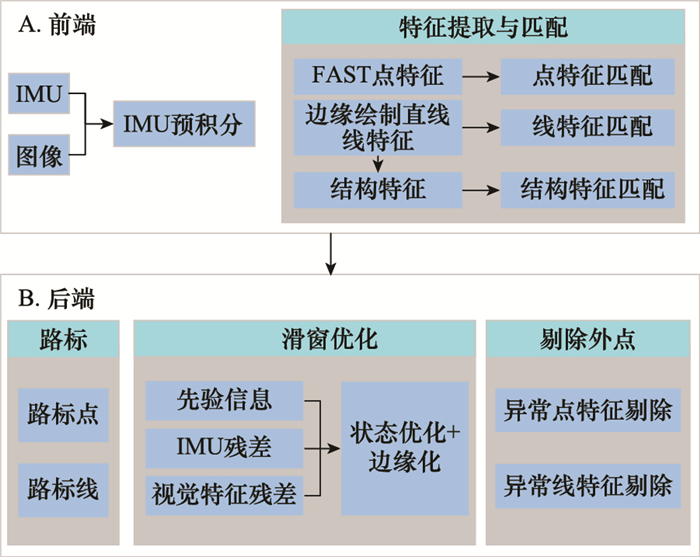

图2
误匹配线段"
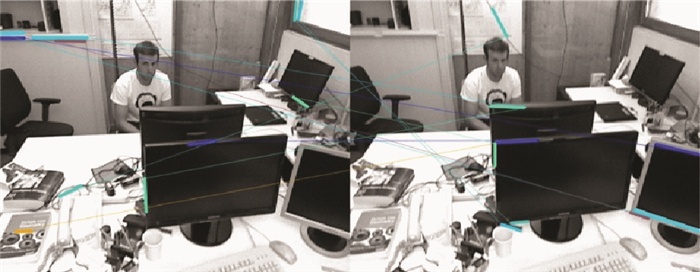
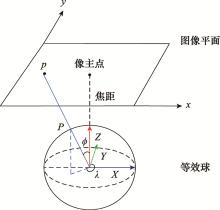
图3
等效球"

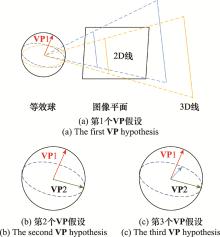
图4
VP提取过程"
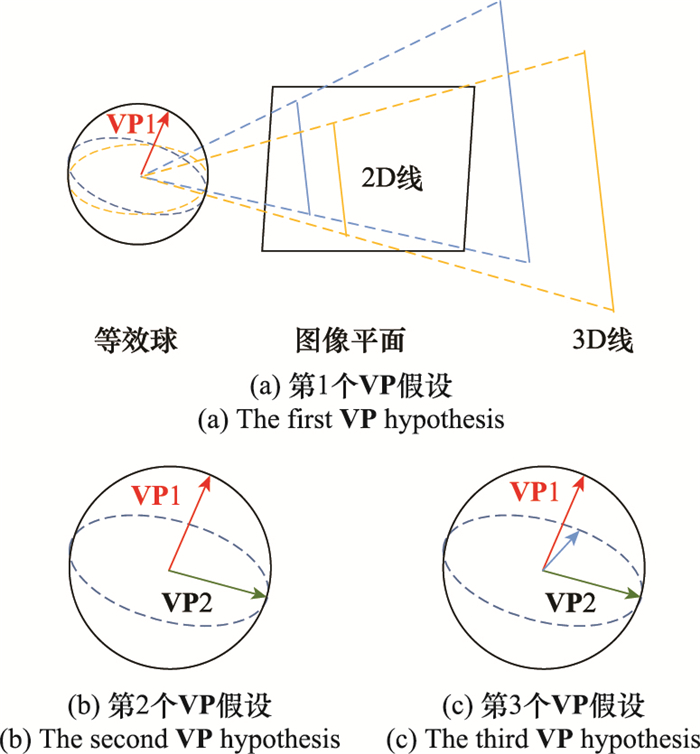
图5
不同算法提取的结构特征对应的结构线"
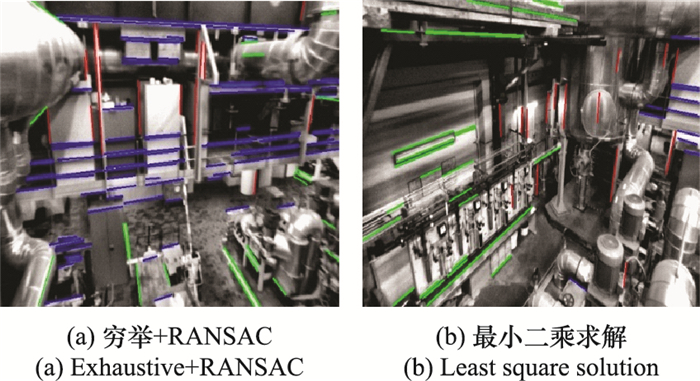

图6
V1_01_easy序列某帧图像提取的结构特征"
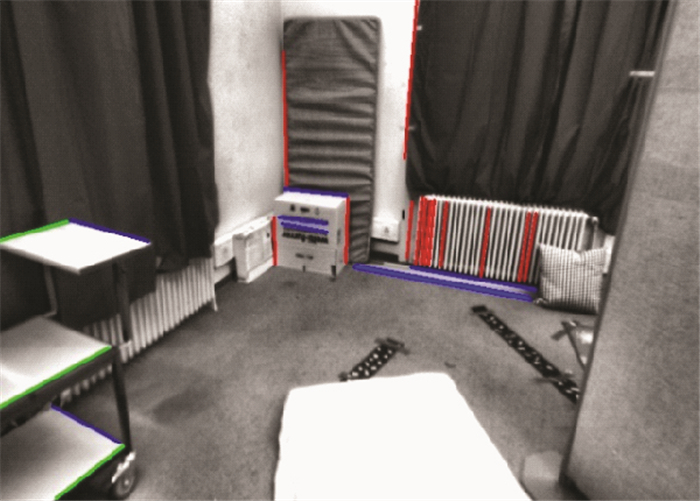

图7
MH_02_easy数据集上PL-VIO与FMF-VIO的误差"

图8
MH_04_difficult数据集上MF-VIO与FMF-VIO的误差"
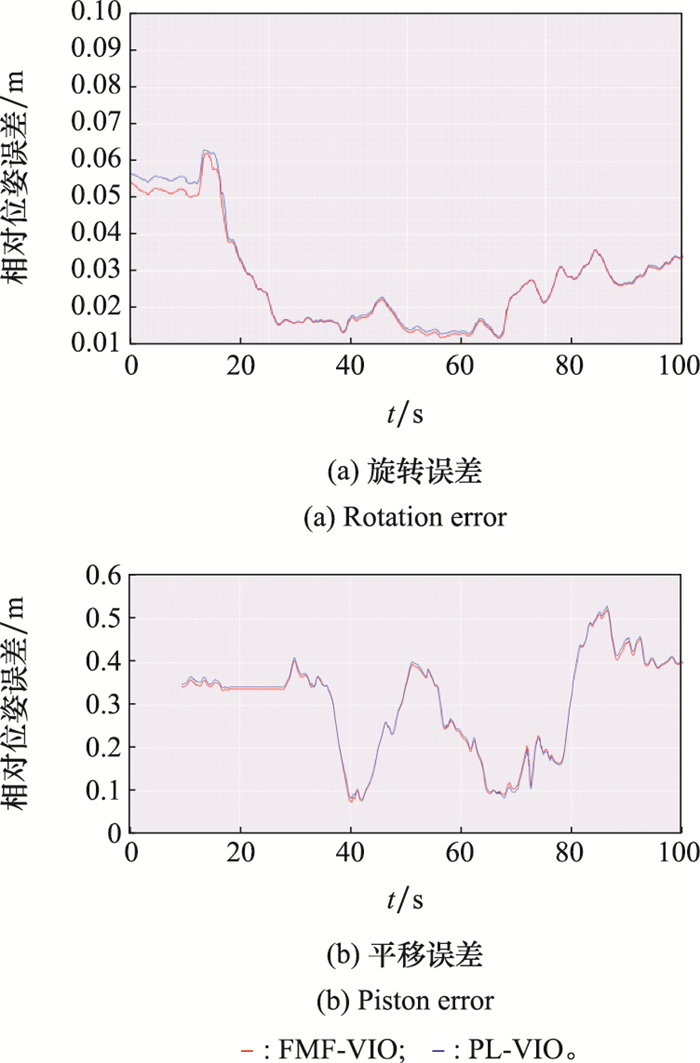
表1
平移和旋转的均方根误差"
| 序列 | OpenVINS | PL-VIO | MF-VIO | FMF-VIO | |||||||
| 平移/m | 旋转/rad | 平移/m | 旋转/rad | 平移/m | 旋转/rad | 平移/m | 旋转/rad | ||||
| MH_01_easy | / | / | 0.139 7881 | 0.026 952 | 0.172 3642 | 0.024 5442 | 0.175 494 | 0.023 9751 | |||
| MH_02_easy | / | / | 0.141 971 | 0.043 020 | 0.136 8332 | 0.038 5541 | 0.136 2591 | 0.038 8872 | |||
| MH_03_medium | / | / | 0.264 665 | 0.042 052 | 0.260 5641 | 0.037 9341 | 0.263 4432 | 0.038 8712 | |||
| MH_04_difficult | / | / | 0.362 234 | 0.040 540 | 0.329 1412 | 0.039 5931 | 0.325 9931 | 0.039 6552 | |||
| MH_05_ difficult | / | / | 0.277 990 | 0.026 338 | 0.269 9911 | 0.025 4512 | 0.270 5852 | 0.022 9421 | |||
| V1_01_easy | 0.0641 | 0.020 9261 | 0.079 288 | 0.143 704 | 0.068 9541 | 0.141 5902 | 0.070 522 | 0.141 952 | |||
| V1_03_difficult | 0.202 | 0.103 5682 | 0.202 742 | 0.085 312 | 0.114 1081 | 0.112 057 | 0.181 2052 | 0.082 7371 | |||
| V2_01_easy | 0.073 | 0.027 6631 | 0.087 473 | 0.053 186 | 0.059 3902 | 0.029 635 | 0.058 8551 | 0.029 3662 | |||
| V2_02_medium | 0.0791 | 0.041 3641 | 0.147 834 | 0.073 4792 | 0.141 0452 | 0.077 073 | 0.141 081 | 0.077 313 | |||
| V2_03_ difficult | / | / | 0.308 307 | 0.077 721 | 0.214 9721 | 0.037 3351 | 0.257 5712 | 0.044 2542 | |||
表2
VP提取算法的实时性展示"
| 序列 | MF | GMF | G2MF |
| MH_01_easy | 63.320 76 | 12.049 29 | 9.625 10 |
| MH_02_easy | 59.049 39 | 13.145 60 | 8.789 46 |
| MH_03_ medium | 57.212 60 | 11.961 64 | 9.586 75 |
| MH_04_difficult | 58.012 88 | 11.695 74 | 8.921 13 |
| MH_05_ difficult | 57.783 94 | 12.289 53 | 8.775 61 |
| V1_01_easy | 58.892 84 | 10.977 85 | 8.411 83 |
| V1_03_difficult | 56.624 59 | 10.368 42 | 9.129 10 |
| V2_01_easy | 56.284 12 | 9.939 593 | 9.404 82 |
| V2_02_medium | 58.044 27 | 11.710 93 | 9.303 44 |
| V2_03_ difficult | 58.629 07 | 10.307 59 | 9.595 35 |
表3
PL-VIO与FMF-VIO的不同单元每帧平均执行时间"
| 模型 | 操作 | PL-VIO | FMF-VIO |
| 前端 | 点特征提取与匹配 | 18.729 40 | 17.150 06 |
| 线段特征提取与匹配 | 122.447 10 | 36.727 67 | |
| 结构特征提取与匹配 | - | 8.775 61 | |
| 后端 | 非线性优化 | 30.827 74 | 33.498 91 |
| 边缘化 | 5.100 24 | 8.137 24 |
| 1 | 陈凤东, 洪炳镕. 基于特征地图的移动机器人全局定位与自主泊位方法[J]. 电子学报, 2010, 38 (6): 1256- 1261. |
| CHEN F D , HONG B R . A global localization and self-docking method for mobile robot based on feature map[J]. Acta Electronica Sinica, 2010, 38 (6): 1256- 1261. | |
| 2 | 王晓龙, 刘海颖, 王景琪. 基于分层SLAM的空地多智能体协同导航[J]. 系统工程与电子技术, 2020, 42 (1): 166- 171. |
| WANG X L , LIU H Y , WANG J Q . Collaborative navigation of air-ground multi-agent based on hierarchical SLAM[J]. Systems Engineering and Electronics, 2020, 42 (1): 166- 171. | |
| 3 |
陈宝华, 邓磊, 陈志祥, 等. 基于即时稠密三维重构的无人机视觉定位[J]. 电子学报, 2017, 45 (6): 1294- 1300.
doi: 10.3969/j.issn.0372-2112.2017.06.003 |
|
CHEN B H , DENG L , CHEN Z X , et al. Instant dense 3D reconstruction-based UAV vision localization[J]. Acta Electronica Sinica, 2017, 45 (6): 1294- 1300.
doi: 10.3969/j.issn.0372-2112.2017.06.003 |
|
| 4 | 王通典, 刘洁瑜, 吴宗收, 等. 基于多尺度光流融合特征点视觉-惯性SLAM方法[J]. 系统工程与电子技术, 2022, 44 (3): 977- 985. |
| WANG T D , LIU J Y , WU Z S , et al. Visual-inertial SLAM method based on multi-scale optical flow fusion feature point[J]. Systems Engineering and Electronics, 2022, 44 (3): 977- 985. | |
| 5 |
GUI J J , GU D B , WANG S , et al. A review of visual inertial odometry from filtering and optimisation perspectives[J]. Advanced Robotics, 2015, 29 (20): 1289- 1301.
doi: 10.1080/01691864.2015.1057616 |
| 6 | ZUO X X, XIE X J, LIU Y, et al. Robust visual SLAM with point and line features[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2017: 1775-1782. |
| 7 |
HE Y J , ZHAO J , GUO Y , et al. PL-VIO: tightly coupled monocular visual-inertial odometry using point and line features[J]. Sensors, 2018, 18 (4): 1-25, 1159.
doi: 10.1109/JSEN.2017.2782543 |
| 8 | 赵良玉, 金瑞, 朱叶青, 等. 基于点线特征融合的双目惯性SLAM算法[J]. 航空学报, 2021, 42 (12): 325117. |
| ZHAO L Y , JIN R , ZHU Y Q , et al. Stereo visual-inertial SLAM with point and line features[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42 (12): 325117. | |
| 9 | LEE G H, FRAUNDORFER F, POLLEFEYS M. MAV visual SLAM with plane constraint[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2011: 3139-3144. |
| 10 | 李海丰, 胡遵河, 陈新伟. PLP-SLAM: 基于点、线、面特征融合的视觉SLAM方法[J]. 机器人, 2017, 39 (2): 214- 220. |
| LI H F , HU Z H , CHEN X W . PLP-SLAM: a visual SLAM method based on point-line-plane feature fusion[J]. Robot, 2017, 39 (2): 214- 220. | |
| 11 | 孙沁璇, 苑晶, 张雪波, 等. PLVO: 基于平面和直线融合的RGB-D视觉里程计[J]. 自动化学报, 2023, 49 (10): 1001- 1013. |
| SUN Q X , YUAN J , ZHANG X B , et al. PLVO: plane-line-based RGB-D visual odometry[J]. Acta Automatica Sinica, 2023, 49 (10): 1001- 1013. | |
| 12 | CAMPOSECO F, POLLEFEYS M. Using vanishing points to improve visual-inertial odometry[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2015: 5219-5225. |
| 13 | KIM P, COLTIN B. Low-drift visual odometry in structured environments by decoupling rotational and translational motion[C]// Proc. of the IEEE International Conference on Robotics and Automation, 2018: 7247-7253. |
| 14 |
GUO R , PENG K , ZHOU D , et al. Robust visual compass using hybrid features for indoor environments[J]. Electronics, 2019, 8 (2): 220.
doi: 10.3390/electronics8020220 |
| 15 | KNEIP L, WEISS S, SIEGWART R. Deterministic initialization of metric state estimation filters for loosely-coupled mono-cular vision-inertial systems[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2011: 2235-2241. |
| 16 | WEISS S, SIEGWART R. Real-time metric state estimation for modular vision-inertial systems[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2011: 4531-4537. |
| 17 |
BLOESCH M , BURRI M , OMARI S , et al. Iterated extended Kalman filter based visual-inertial odometry using direct photometric feedback[J]. The International Journal of Robotics Research, 2017, 36 (10): 1053- 1072.
doi: 10.1177/0278364917728574 |
| 18 | LEUTENEGGER S , LYNEN S , BOSSE M , et al. Keyframe-based visual-inertial odometry using nonlinear optimization[J]. The International Journal of Robotics Research, 2015, 34 (3): 314- 334. |
| 19 | LI M , MOURIKIS A I . High-precision, consistent EKF-based visual-inertial odometry[J]. The International Journal of Robotics Research, 2013, 32 (6): 690- 711. |
| 20 | BLOESCH M , BURRI M , OMARI S , et al. Iterated extended Kalman filter based visual-inertial odometry using direct photometric feedback[J]. The International Journal of Robotics Research, 2017, 36 (10): 1053- 1072. |
| 21 | LEUTENEGGER S , LYNEN S , BOSSE M , et al. Keyframe-based visual-inertial odometry using nonlinear optimization[J]. The International Journal of Robotics Research, 2015, 34 (3): 314- 334. |
| 22 | CAMPOS C , ELVIRA R , RODRÍGUEZ J J G , et al. ORB-SLAM3: an accurate open-source library for visual, visual-inertial, and multimap SLAM[J]. IEEE Trans.on Robotics, 2021, 37 (6): 1874- 1890. |
| 23 | FORSTER C , CARLONE L , DELLAERT F , et al. On-Manifold preintegration for real-time visual-inertial odometry[J]. IEEE Trans.on Robotics, 2017, 33 (1): 1- 21. |
| 24 | LU X H, J Y Y, LI H, et al. 2-Line exhaustive searching for real-time vanishing point estimation in Manhattan world[C]// Proc. of the IEEE Winter Conference on Applications of Computer Vision, 2017: 345-353. |
| 25 | BAZIN J C , DEMONCEAUX C , VASSEUR P , et al. Rotation estimation and vanishing point extraction by omnidirectional vision in urban environment[J]. The International Journal of Robotics Research, 2012, 31 (1): 63- 81. |
| 26 | DENIS P, ELDER J H, ESTRADA F J. Efficient edge based methods for estimating Manhattan frames in urban imagery[C]//Proc. of the European Conference on Computer Vision, 2008: 97-210. |
| 27 | BAZIN J C, POLLEFEYS M. 3-line RANSAC for orthogonal vanishing point detection[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2012: 4282-4287. |
| 28 | MIRZAEI F M, ROUMELIOTIS S I. Optimal estimation of vanishing points in a manhattan world[C]// Proc. of the IEEE International Conference on Computer Vision, 2011: 2454-2461. |
| 29 | WILDENAUER H, HANBURY A. Robust camera self-calibration from monocular images of Manhattan worlds[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2012: 2831-2838. |
| 30 | TRETYAK E, BARINOVA O, KOHLI P, et al. Geometric image parsing in man-made environments[C]//Proc. of the International Journal of Computer Vision, 2012, 97(3): 305-321. |
| 31 | ZHOU H Z , ZOU D P , PEI L , et al. StructSLAM: visual SLAM with building structure lines[J]. IEEE Trans.on Vehi-cular Technology, 2015, 64 (4): 1364- 1375. |
| 32 | ZOU D P , WU Y X , PEI L , et al. StructVIO: visual-inertial odometry with structural regularity of man-made environments[J]. IEEE Trans.on Robotics, 2019, 35 (4): 999- 1013. |
| 33 | GOMEZ-OJEDA R , MORENO F A , ZUNIGA-NOEL D , et al. PL-SLAM: a stereo SLAM system through the combination of points and line segments[J]. IEEE Trans.on Robotics, 2019, 35 (3): 734- 746. |
| 34 | LI H A, YAO J, BAZIN J, et al. A monocular SLAM system leveraging structural regularity in Manhattan world[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2018: 2518-2525. |
| 35 | KIM P, COLTIN B. Low-drift visual odometry in structured environments by decoupling rotational and translational motion[C]// Proc. of the IEEE International Conference on Robotics and Automation, 2018: 7247-7253. |
| 36 | LUCAS B, KANADE T. An iterative image registration technique with an application to stereo vision[C]//Proc. of the International Joint Conference on Artificial Intelligence, 1981: 674-679. |
| 37 | AKINLAR C , TOPAL C . EDLINES: a real-time line segment detector with a false detection control[J]. Pattern Recognition Letters, 2011, 32 (13): 1633- 1642. |
| 38 | QIN T , LI P , SHEN S J . VINS-Mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Trans.on Robotics, 2018, 34 (4): 1004- 1020. |
| 39 | BARTOLI A , STURM P . Structure-from-motion using lines: representation, triangulation, and bundle adjustment[J]. Computer Vision and Image Understanding, 2005, 100 (3): 416- 441. |
| 40 | BURRI M , NIKOLIC J , GOHL P , et al. The EuRoC micro aerial vehicle datasets[J]. International Journal of Robotics Research, 2016, 35 (10): 1157- 1163. |
| 41 | GENEVA P, ECKENHOFF K, LEE W, et al. Openvins: a research platform for visual-inertial estimation[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2020: 4666-4672. |
| [1] | 鹿珂珂, 王超, 吴俊峰, 钱峰. 基于梯度信息控制曝光的视觉惯性里程计[J]. 系统工程与电子技术, 2023, 45(5): 1496-1502. |
| [2] | 付有斌, 康巧燕, 王建峰, 胡海岩, 赵朔. 标签分割的软件定义飞行自组网控制器智能部署方法[J]. 系统工程与电子技术, 2022, 44(10): 3249-3257. |
| [3] | 杨磊, 李慧娟, 黄博, 刘伟, 李埔丞. 双层稀疏组Lasso高分辨SAR结构特征增强成像[J]. 系统工程与电子技术, 2021, 43(2): 351-362. |
| [4] | 奔粤阳, 魏晓峰, 高倩倩, 赵显鹏, 戴平安, 孙炎. 基于SINS舰船升沉测量误差分析与补偿[J]. 系统工程与电子技术, 2020, 42(7): 1590-1596. |
| [5] | 董春梅, 任顺清, 陈希军. 基于三轴转台误差分析的IMU标定方法[J]. 系统工程与电子技术, 2016, 38(4): 895-901. |
| [6] | 刘丹, 段建民, 于宏啸. 基于自适应渐消EKF的FastSLAM算法[J]. 系统工程与电子技术, 2016, 38(3): 644-651. |
| [7] | 韩萍, 于晓红, 邓豪, 冯青, 石庆研. 稀疏描述与结构特征融合的极化SAR斑点抑制算法[J]. 系统工程与电子技术, 2015, 37(2): 284-290. |
| [8] | 吴晓琳,宋萌,苑晶,孙凤池,陶通. 通讯范围受限条件下的多机器人主动SLAM[J]. Journal of Systems Engineering and Electronics, 2012, 34(10): 2121-2128. |
| [9] | 陈思,杨健,宋小全. SAR图像线特征分析与自动提取[J]. Journal of Systems Engineering and Electronics, 2010, 32(9): 1868-1874. |
| [10] | 孙枫,孙伟. 旋转自动补偿捷联惯导系统技术研究[J]. Journal of Systems Engineering and Electronics, 2010, 32(1): 122-125. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||