
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (9): 2884-2893.doi: 10.12305/j.issn.1001-506X.2023.09.28
张宏1, 吴云华1,*, 钟胜钧1, 郭海波2
收稿日期:2022-11-04
出版日期:2023-08-30
发布日期:2023-09-05
通讯作者:
吴云华
作者简介:张宏(1997—), 男, 硕士研究生, 主要研究方向为航天器姿态控制、半物理仿真基金资助:Hong ZHANG1, Yunhua WU1,*, Shengjun ZHONG1, Haibo GUO2
Received:2022-11-04
Online:2023-08-30
Published:2023-09-05
Contact:
Yunhua WU
摘要:
针对空间动目标高精度姿态跟踪控制问题, 提出一种由卫星和二维转台组成的复合平台姿态高精度控制方法。首先建立复合平台耦合动力学模型, 其次针对卫星本体设计反步法控制器实现粗跟踪。当姿态误差满足一定的切换要求时, 粗跟踪误差作为二维转台的目标输入, 二维转台采用基于负载观测器的模型预测方法辅助卫星本体进行姿态精跟踪控制, 从而实现复合平台的高精度姿态控制。此外, 设计了非线性干扰观测器,用来估计耦合运动对卫星本体产生的干扰力矩。数值仿真结果表明, 所提出的复合平台姿态控制精度可以提高一个数量级, 可以实现高精度姿态跟踪控制, 为航天工程实践提供一定的理论基础。
中图分类号:
张宏, 吴云华, 钟胜钧, 郭海波. 基于反步法的空间目标复合指向控制方法研究[J]. 系统工程与电子技术, 2023, 45(9): 2884-2893.
Hong ZHANG, Yunhua WU, Shengjun ZHONG, Haibo GUO. Space target compound pointing control method based on backstepping[J]. Systems Engineering and Electronics, 2023, 45(9): 2884-2893.
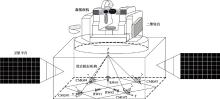
图1
复合平台示意图"


图2
转台结构示意图"
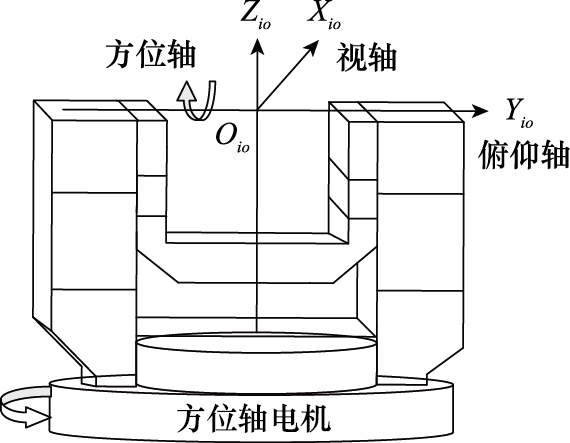

图3
复合平台系统控制原理图"

表1
转台模型参数"
| 参数 | 取值 |
| 俯仰轴转动惯量Jpy/kg·m2 | 0.08 |
| 方位轴转动惯量Jpz/kg·m2 | 0.05 |
| 方位部分质量m1/kg | 10 |
| 俯仰部分质量m2/kg | 5 |
| 电机转动惯量Jm/kg·m2 | 0.03 |
| 电机磁极对数pn | 5 |
| 电阻R/Ω | 0.369 |
| 电感L/mH | 2.4 |
| 摩擦系数B/(N·m·s/rad) | 0.004 7 |
| 转台测量误差/(°) | 0.000 01 |
| 转台干扰力矩/N·m | 10-5 |

图4
期望姿态角"


图5
期望姿态角速度"


图6
当前实际跟踪姿态"
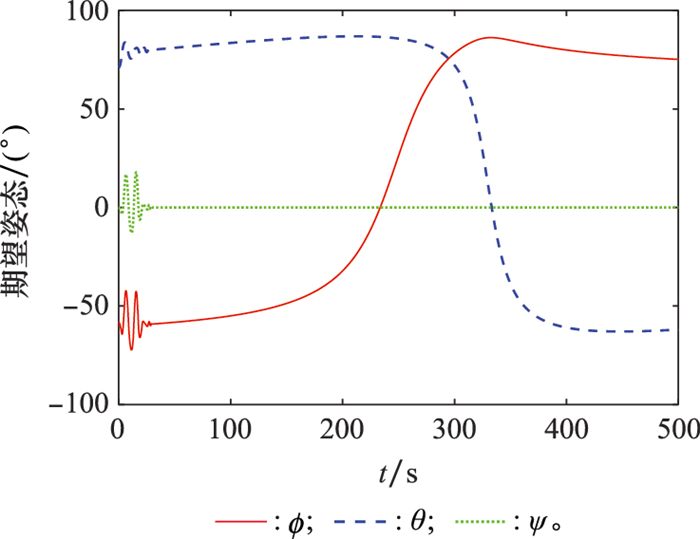

图7
卫星本体的姿态误差"

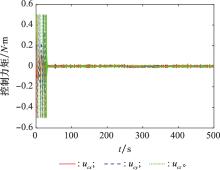
图8
卫星本体的姿态控制力矩"


图9
不考虑耦合的复合平台下方位轴姿态误差"


图10
不考虑耦合的复合平台下俯仰轴姿态误差"


图11
耦合干扰力矩对卫星本体姿态的影响"
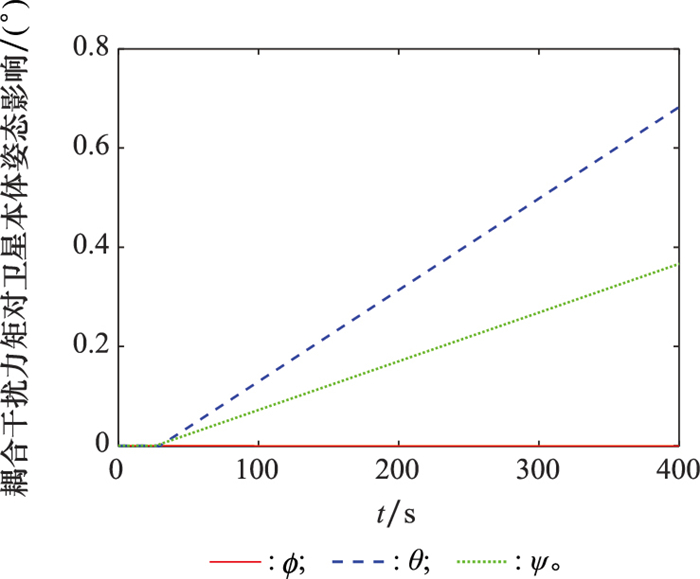

图12
考虑耦合的复合平台方位轴姿态误差"


图13
考虑耦合的复合平台俯仰角姿态误差"


图14
俯仰轴耦合干扰力矩"


图15
方位轴耦合干扰力矩"


图16
PD型迭代学习算法(对比算例)"

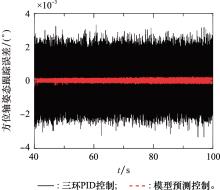
图17
方位轴对比跟踪结果"


图18
俯仰轴姿态对比跟踪结果"

表2
仿真结果总结对比"
| 姿态算法 | 反步法+模型预测 | PD+迭代学习 | 反步法+PID |
| 姿态跟踪误差/(°) | 0.5×10-4 | 0.005 | 0.004 |
| 姿态角速度/(°/s) | 0.001 | 0.02 | 0.01 |
| 开始收敛时间/s | 30 | 50 | 35 |
| 是否需要迭代 | 否 | 是 | 否 |
| 1 |
LIU Y , ZHANG S Y , HU H Y . A conflict avoidance algorithm for space-based collaborative stereo observation mission scheduling of space debris[J]. Advances in Space Research, 2022, 70 (8): 2302- 2314.
doi: 10.1016/j.asr.2022.06.064 |
| 2 |
ZHANG S Y , ZHU Z C , HU H Y , et al. Research on task sa-tellite selection method for space object detection LEO constellation based on observation window projection analysis[J]. Aerospace, 2021, 8 (6): 156- 156.
doi: 10.3390/aerospace8060156 |
| 3 |
丁岩, 于志刚. 考虑输入输出受限的无人机自适应滑模容错控制[J]. 系统工程与电子技术, 2020, 42 (10): 2340- 2347.
doi: 10.3969/j.issn.1001-506X.2020.10.24 |
|
DING Y , YU Z G . Adaptive sliding mode fault-tolerant control of UAV considering input and output constraints[J]. Systems Engineering and Electronics, 2020, 42 (10): 2340- 2347.
doi: 10.3969/j.issn.1001-506X.2020.10.24 |
|
| 4 |
YADEGARI H , BEYRAMZAD J , KHANMIRZA E . Magnetorquers-based satellite attitude control using interval type-Ⅱ fuzzy terminal sliding mode control with time delay estimation[J]. Advances in Space Research, 2022, 69 (8): 3204- 3225.
doi: 10.1016/j.asr.2022.01.018 |
| 5 |
XIE H Y , WU B L , LIU W X . Adaptive neural network model-based event-triggered attitude tracking control for spacecraft[J]. International Journal of Control, Automation and Systems, 2021, 19 (1): 172- 185.
doi: 10.1007/s12555-019-0487-5 |
| 6 |
WU Y H , HAN F , ZHENG M H , et al. Attitude tracking control for a space moving target with high dynamic performance using hybrid actuator[J]. Aerospace Science and Technology, 2018, 78, 102- 117.
doi: 10.1016/j.ast.2018.03.041 |
| 7 |
HU H , LIU L , WANG Y J , et al. Active fault-tolerant attitude tracking control with adaptive gain for spacecrafts[J]. Aerospace Science and Technology, 2020, 98, 105706.
doi: 10.1016/j.ast.2020.105706 |
| 8 | YE D , ZOU A M , SUN Z W . Predefined-time predefined-bounded attitude tracking control for rigid spacecraft[J]. IEEE Trans. on Aerospace and Electronic Systems, 2021, 58 (1): 464- 472. |
| 9 |
ZHENG M H , WU Y H , LI C Y . Reinforcement learning stra-tegy for spacecraft attitude hyper-agile tracking control with uncertainties[J]. Aerospace Science and Technology, 2021, 119, 107126.
doi: 10.1016/j.ast.2021.107126 |
| 10 |
FAN L M , HUANG H , ZHOU K M . Robust fault-tolerant attitude control for satellite with multiple uncertainties and actuator faults[J]. Chinese Journal of Aeronautics, 2020, 33 (12): 3380- 3394.
doi: 10.1016/j.cja.2020.06.026 |
| 11 | 柯晓曼, 吴云华, 郑墨泓, 等. 基于改进迭代学习的参数不确定卫星姿态控制[J]. 系统工程与电子技术, 2021, 43 (2): 508- 518. |
| KE X M , WU Y H , ZHENG M H , et al. Attitude control of spacecraft with uncertain parameters based on improved iterative learning[J]. Systems Engineering and Electronics, 2021, 43 (2): 508- 518. | |
| 12 |
JIANG T , ZHANG F B , LIN D F . Finite-time backstepping for attitude tracking with disturbances and input constraints[J]. International Journal of Control, Automation and Systems, 2020, 18 (6): 1487- 1497.
doi: 10.1007/s12555-019-0303-2 |
| 13 | PUKDEBOON C . Adaptive backstepping finite-time sliding mode control of spacecraft attitude tracking[J]. Journal of Systems Engineering and Electronics, 2015, 26 (4): 826- 839. |
| 14 |
ZHAO L , LIU G Q . Adaptive finite-time attitude tracking control for state constrained rigid spacecraft systems[J]. IEEE Trans. on Circuits and Systems Ⅱ: Express Briefs, 2021, 68 (12): 3552- 3556.
doi: 10.1109/TCSII.2021.3070799 |
| 15 |
XU L X , MA H J , GUO D , et al. Backstepping sliding-mode and cascade active disturbance rejection control for a quadrotor UAV[J]. IEEE/ASME Trans.on Mechatronics, 2020, 25 (6): 2743- 2753.
doi: 10.1109/TMECH.2020.2990582 |
| 16 | XIE M L, DING L, CAO Y, et al. Research on optimal control strategy for velocity stability of space two-dimensional tracking turntable[C]//Proc. of the IEEE 6th Information Technology and Mechatronics Engineering Conference, 2022, 6: 2011-2016. |
| 17 |
HUANG C , MENG B H , CHANG Y Y , et al. Geometric calibration method based on a two-dimensional turntable for a directional polarimetric camera[J]. Applied Optics, 2020, 59 (1): 226- 233.
doi: 10.1364/AO.59.000226 |
| 18 |
鄢南兴, 林喆, 刘雅宁, 等. 卫星光轴复合指向控制方法研究[J]. 中国空间科学技术, 2021, 41 (3): 114- 122.
doi: 10.16708/j.cnki.1000-758X.2021.0045 |
|
YAN N X , LIN Z , LIU Y N , et al. Research on composite pointing control method of satellite optical axis[J]. Chinese Space Science and Technology, 2021, 41 (3): 114- 122.
doi: 10.16708/j.cnki.1000-758X.2021.0045 |
|
| 19 |
ABADI A S S , HOSSEINABADI P A , MEKHILEF S . Fuzzy adaptive fixed-time sliding mode control with state observer for a class of high-order mismatched uncertain systems[J]. International Journal of Control, Automation and Systems, 2020, 18 (10): 2492- 2508.
doi: 10.1007/s12555-019-0650-z |
| 20 |
GAO P , ZHANG G M , LYU X D . Model-free hybrid control with intelligent proportional integral and super-twisting sliding mode control of PMSM drives[J]. Electronics, 2020, 9 (9): 1427- 1443.
doi: 10.3390/electronics9091427 |
| 21 | JING F, ZHANG X, CHENG Z Y, et al. Study of light beam tracking based on compound axis control[C]//Proc. of the IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference, 2019: 1686-1691. |
| 22 | LI L L , PEI G , LIU J , et al. 2-DOF robust H∝ control for permanent magnet synchronous motor with disturbance observer[J]. IEEE Trans. on Power Electronics, 2020, 36 (3): 3462- 3472. |
| 23 |
韩琦琦, 马晶, 于思源, 等. 卫星光通信中耦合运动对光信号跟踪影响分析[J]. 宇航学报, 2005, 26 (4): 405- 409.
doi: 10.3321/j.issn:1000-1328.2005.04.004 |
|
HAN Q Q , MA J , YU S Y , et al. Analysis of the influence of coupling motion on optical signal tracking in satellite optical communication[J]. Journal of Astronautics, 2005, 26 (4): 405- 409.
doi: 10.3321/j.issn:1000-1328.2005.04.004 |
|
| 24 |
刘剑峰, 韩琦琦, 于思源, 等. 卫星光通信终端二维转台运动参量对天线指向影响研究[J]. 宇航学报, 2007, 28 (4): 926- 931.
doi: 10.3321/j.issn:1000-1328.2007.04.029 |
|
LIU J F , HAN Q Q , YU S Y , et al. Research on the influence of motion parameters of two-dimensional turntable on antenna pointing of satellite optical communication terminal[J]. Journal of Astronautics, 2007, 28 (4): 926- 931.
doi: 10.3321/j.issn:1000-1328.2007.04.029 |
|
| 25 |
LIN L I , LI Y , LI W , et al. Recent advances in precision measurement & pointing control of spacecraft[J]. Chinese Journal of Aeronautics, 2021, 34 (10): 191- 209.
doi: 10.1016/j.cja.2020.11.018 |
| 26 |
LEE K W , SINGH S N . Composite adaptive attitude control of asteroid-orbiting spacecraft with regressor integral excitation[J]. IEEE Trans. on Aerospace and Electronic Systems, 2022, 58 (5): 4814- 4823.
doi: 10.1109/TAES.2022.3164011 |
| 27 | LI X P, HUANG L. A two-dimensional system design for the coarse pointing assembly used for spaceborne laser communication[C]//Proc. of the SPIE 7th Asia Pacific Conference on Optics Manufacture and 2021 International Forum of Young Scientists on Advanced Optical Manufacturing, 2022. |
| 28 | 马冉冉, 王彤宇. 基于ADAMS的二维跟踪转台动力学耦合分析[J]. 长春理工大学学报(自然科学版), 2015, 38 (1): 79- 84. |
| MA R R , WANG T Y . Coupled analysis of two-dimensional tracking turntable dynamics based on ADAMS[J]. Journal of Changchun University of Science and Technology (Natural Science Edition), 2015, 38 (1): 79- 84. | |
| 29 |
WU Y H , ZHENG M H , HE W , et al. High precision attitude dynamic tracking control of a moving space target[J]. Chinese Journal of Aeronautics, 2019, 32 (10): 2324- 2336.
doi: 10.1016/j.cja.2019.06.005 |
| 30 | 周涛. 基于反双曲正弦函数的扩张状态观测器[J]. 控制与决策, 2015, 30 (5): 943- 946. |
| ZHOU T . Extended state observer based on inverse hyperbolic sine function[J]. Control and Decision, 2015, 30 (5): 943- 946. | |
| 31 |
WU Y H , ZHENG M H , LI C Y , et al. Hybrid actuator optimal angular momentum management with analytical solution for spacecraft attitude agile maneuvering mission[J]. Aerospace Science and Technology, 2020, 97, 105597.
doi: 10.1016/j.ast.2019.105597 |
| [1] | 徐文丰, 李颖晖, 裴彬彬, 禹志龙. 基于多模型MPC的变体飞机协调优化控制[J]. 系统工程与电子技术, 2023, 45(9): 2902-2911. |
| [2] | 孙田野, 孙伟, 吴建军. 改进Quatre算法的无人机编队快速集结方法[J]. 系统工程与电子技术, 2022, 44(9): 2840-2848. |
| [3] | 胥彪, 李翔, 李爽, 张金鹏. 基于非线性模型预测控制的火星大气进入智能制导方法[J]. 系统工程与电子技术, 2021, 43(7): 1943-1953. |
| [4] | 王晓海, 孟秀云, 李传旭. 基于MPC的无人机航迹跟踪控制器设计[J]. 系统工程与电子技术, 2021, 43(1): 191-198. |
| [5] | 杨宇, 吴达, 高峰, 邓建军. 适用于超低空拦截的复合制导律设计方法[J]. 系统工程与电子技术, 2021, 43(1): 208-215. |
| [6] | 朱梦圆, 吕娜, 陈柯帆, 钟赟, 刘创, 高维廷. 航空集群协同搜索马尔可夫运动目标方法[J]. 系统工程与电子技术, 2019, 41(9): 2041-2047. |
| [7] | 宋敏, 戴静, 孔韬. 基于NMPC的无人机自主防撞控制方法[J]. 系统工程与电子技术, 2019, 41(9): 2092-2099. |
| [8] | 傅江良, 甘庆波, 张扬, 赵柯昕, 袁洪. 基于NTSM的航天器特征点凝视跟踪控制[J]. 系统工程与电子技术, 2019, 41(7): 1623-1632. |
| [9] | 王超, 张胜修, 宋仔标, 杨建业, 吴晓露. 飞行器抗饱和鲁棒自适应非线性模型预测控制[J]. 系统工程与电子技术, 2018, 40(2): 393-400. |
| [10] | 盖俊峰, 赵国荣, 宋超. 基于线性近似和神经网络逼近的模型预测控制[J]. 系统工程与电子技术, 2015, 37(2): 394-399. |
| [11] | 唐贤伦,李洋,李鹏,张毅. 基于多Agent粒子群优化的多步SVR模型预测控制[J]. 系统工程与电子技术, 2014, 36(5): 958-964. |
| [12] | 陈炳龙,耿云海. 对接端口间相对运动耦合动力学建模[J]. 系统工程与电子技术, 2014, 36(4): 714-720. |
| [13] | 祁晓明, 魏瑞轩, 沈东, 茹常剑, 周欢. 基于运动目标预测的多无人机分布式协同搜索[J]. 系统工程与电子技术, 2014, 36(12): 2417-2425. |
| [14] | 高晓光, 李青原, 邸若海. 基于DBN威胁评估的MPC无人机三维动态路径规划[J]. 系统工程与电子技术, 2014, 36(11): 2199-2205. |
| [15] | 陈进东,潘丰. 基于在线支持向量机和遗传算法的预测控制[J]. Journal of Systems Engineering and Electronics, 2013, 35(6): 1275-1280. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||