
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (8): 2546-2554.doi: 10.12305/j.issn.1001-506X.2023.08.29
查峰, 位秋硕, 何泓洋, 李豹
收稿日期:2021-12-31
出版日期:2023-07-25
发布日期:2023-08-03
通讯作者:
何泓洋
作者简介:查峰 (1984—),男,副教授,博士,主要研究方向为新型惯性导航与组合导航基金资助:Feng ZHA, Qiushuo WEI, Hongyang HE, Bao LI
Received:2021-12-31
Online:2023-07-25
Published:2023-08-03
Contact:
Hongyang HE
摘要:
旋转调制技术可以有效降低惯导系统的导航误差,但目前常规旋转惯导系统的机械结构无法更进一步提升误差调制效果。基于惯性测量单元(inertial measurement unit,IMU)体对角线安装结构,提出了一种改进的双轴旋转方案。方案选取IMU 3个正交惯性器件的体对角线为水平旋转轴,与该轴正交的旋转轴为垂向旋转轴。通过改变水平和垂向旋转轴的旋转速度、方向和次序实现双轴旋转。由于旋转轴与惯性器件均不同向,在旋转的任意时刻,3个方向的惯性器件误差均得到了调制。首先,建立了基于体对角线旋转方案的数学模型,在此基础上推导了坐标变换关系与误差方程,得到了误差传播特性,验证了改进方案的优势。最后,进行了系统综合误差的仿真校验。在相同误差条件下,系统位置误差由传统方案的0.418 9海里/120小时减小到0.120 7海里/120小时,验证了改进方案抑制误差的有效性。
中图分类号:
查峰, 位秋硕, 何泓洋, 李豹. 基于IMU体对角线旋转的双轴旋转方案[J]. 系统工程与电子技术, 2023, 45(8): 2546-2554.
Feng ZHA, Qiushuo WEI, Hongyang HE, Bao LI. Biaxial rotation scheme based on diagonal rotation of IMU body[J]. Systems Engineering and Electronics, 2023, 45(8): 2546-2554.
表1
传统16位置旋转方案Cpb、ωb和ωp的表达式"
| 旋转秩序 | Cpb | ωb | ωp |
| 1 | |||
| 2 | |||
| 3 | |||
| 4 |

图1
倾斜旋转调制方案"


图2
安装坐标系与旋转坐标系关系"

表2
传统16位置旋转方案由刻度系数和安装误差引起的姿态误差"
| 旋转秩序 | ΦδK | ΦδA |
| 1 | ||
| 2 | ||
| 3 | ||
| 4 | ||
| 5 | ||
| 6 | ||
| 7 | ||
| 8 | ||
| 9 | ||
| 10 | ||
| 11 | ||
| 12 | ||
| 13 | ||
| 14 | ||
| 15 | ||
| 16 |
表3
改进方案由刻度系数和安装误差引起的姿态误差"
| 旋转秩序 | ΦδK | ΦδA |
| 1 | ||
| 2 | ||
| 3 | ||
| 4 | ||
| 5 | ||
| 6 | ||
| 7 | ||
| 8 | ||
| 9 | ||
| 10 | ||
| 11 | ||
| 12 | ||
| 13 | ||
| 14 | ||
| 15 | ||
| 16 |
图3
由刻度系数误差引起的姿态误差"


图4
由安装误差引起的姿态误差"
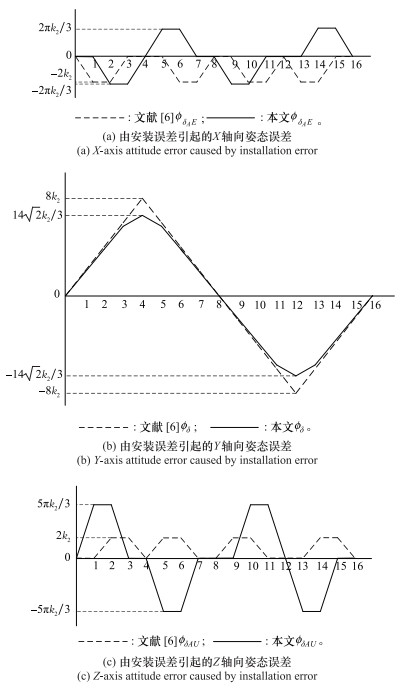
表4
两种方案的北向速度误差"
| 旋转秩序 | 文献[ | 本文方案 |
| 1 | (-2k2)gtr | 0 |
| 2 | (πk1-4k2)gtr | |
| 3 | (2πk1-4k2)gtr | |
| 4 | (2πk1-4k2)gtr | |
| 5 | (πk1-4k2)gtr | |
| 6 | (-6k2)gtr | 0 |
| 7 | (-8k2)gtr | 0 |
| 8 | (-8k2)gtr | 0 |
| 9 | (πk1-8k2)gtr | |
| 10 | (2πk1-10k2)gtr | |
| 11 | (2πk1-12k2)gtr | |
| 12 | (2πk1-12k2)gtr | |
| 13 | (2πk1-14k2)gtr | |
| 14 | (πk1-16k2)gtr | |
| 15 | (-16k2)gtr | 0 |
| 16 | (-16k2)gtr | 0 |
| 平均 | (πk1-9k2)gtr |

图5
北向速度误差幅度大小对比图"

表5
仿真参数设置"
| 参数名称 | 参数数值 |
| 纬度/(°) | 30.58 |
| 经度/(°) | 114.23 |
| 横滚角/(°) | |
| 俯仰角/(°) | |
| 航向角 | |
| 转台转速/(°/s) | 6 |
| 转动时间、停止时间/s | 30 |
| 陀螺仪零偏/(°/h) | 0.001 |
| 陀螺仪随机游走系数/(°/ | 0.000 3 |
| 陀螺仪刻度系数误差/ppm | 5 |
| 陀螺仪安装误差/(″) | 5 |
| 加速度计零偏/μg | 10 |
| 加速度计随机噪声/μg | 1 |
| 加速度计刻度系数误差/ppm | 10 |
| 加速度计安装误差/(″) | 10 |

图6
由刻度系数误差引起的姿态误差对比图"


图7
由安装误差引起的姿态误差对比图"


图8
由刻度系数误差和安装误差引起的北向速度误差对比"
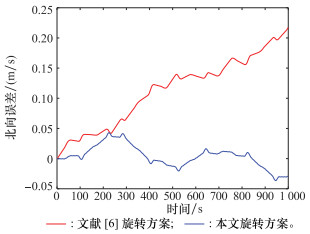

图9
一个周期内x轴、y轴姿态误差对比图"


图10
一个周期内东向、北向速度误差对比图"


图11
长航时(5天)x轴、y轴姿态误差对比图"


图12
长航时(5天)东向、北向速度误差对比图"


图13
长航时(5天)位置误差对比图"

| 6 |
JI Z N , LIU C , CAI S J , et al. Improved sixteen-sequence rotation scheme for dual-axis SINS[J]. Journal of Chinese Inertial Technology, 2013, 21 (1): 46- 50.
doi: 10.3969/j.issn.1005-6734.2013.01.012 |
| 7 | CHEN J P , YANG Z , YE S S , et al. Design of strapdown inertial navigation system based on MEMS[J]. Francis Academic Press, 2020, 3 (4): 110- 121. |
| 8 |
BAN J X , WANG L , MENG Y , et al. A calibration method for rotary optical encoder temperature error in a rotational inertial navigation system[J]. Measurement Science and Technology, 2022, 33 (6): 065203.
doi: 10.1088/1361-6501/ac4c67 |
| 9 |
WANG Z C , XIE Y P , YU X D , et al. A system-level calibration method including temperature-related error coefficients for a strapdown inertial navigation system[J]. Measurement Science and Technology, 2021, 32 (11): 115117.
doi: 10.1088/1361-6501/ac0acd |
| 10 | ZHU L F , ZHANG C X . The fine system-level calibration technique of size effect error for the fiber-SINS[J]. Advanced Materials Research, 2012, 383, 2060- 2065. |
| 11 |
江一夫, 李四海, 严恭敏, 等. 基于双轴旋转调制惯性测量的载体导航信息提取方法[J]. 中国惯性技术学报, 2022, 30 (3): 304-308, 315
doi: 10.13695/j.cnki.12-1222/o3.2022.03.004 |
|
JIANG Y F , LI S H , YAN G M , et al. Vehicle navigation information extraction method based on dual-axis rotation-modulation inertial measurement[J]. Journal of Chinese Inertial Technology, 2022, 30 (3): 304-308, 315
doi: 10.13695/j.cnki.12-1222/o3.2022.03.004 |
|
| 12 | 刘为任, 高阳, 赵坤, 等. 考虑旋转调制INS轴角误差的船体变形测量方法[J]. 中国惯性技术学报, 2022, 30 (1): 1- 8. |
| LIU W R , GAO Y , ZHAO K , et al. Measurement method of hull deformation considering rotation modulation INS shaft angle error[J]. Journal of Chinese Inertial Technology, 2022, 30 (1): 1- 8. | |
| 13 | 朱挺, 王丽芬, 王永让, 等. 双轴旋转惯导载体角运动隔离调制方法研究[J]. 仪器仪表学报, 2020, 41 (12): 66- 75. |
| ZHU T , WANG L F , WANG Y R , et al. Carrier angular motion isolation and modulation method of dual-axis rotation inertial navigation system[J]. Chinese Journal of Scientific Instrument, 2020, 41 (12): 66- 75. | |
| 14 |
常振军, 张志利, 周召发, 等. 基于尺寸效应在线补偿的旋转捷联惯性导航系统初始对准[J]. 兵工学报, 2020, 41 (10): 2016- 2022.
doi: 10.3969/j.issn.1000-1093.2020.10.011 |
|
CHANG Z J , ZHANG Z L , ZHOU Z F , et al. Initial alignment for rotating SINS based on on-line compensation of size effect[J]. Acta Armamentarii, 2020, 41 (10): 2016- 2022.
doi: 10.3969/j.issn.1000-1093.2020.10.011 |
|
| 15 |
LIU Y T , XU X S , LIU X X , et al. A self-alignment algorithm for SINS based on gravitational apparent motion and sensor data denoising[J]. Sensors, 2015, 15 (5): 9827- 9853.
doi: 10.3390/s150509827 |
| 16 | 徐志浩, 周召发, 常振军, 等. 载体运动学辅助的双轴旋转调制惯性导航算法[J]. 系统工程与电子技术, 2020, 42 (9): 2066- 2070. |
| XU Z H , ZHOU Z F , CHANG Z J , et al. Carrier kinematics aided two-axis rotary modulation inertial navigation algorithm[J]. Systems Engineering and Electronics, 2020, 42 (9): 2066- 2070. | |
| 17 |
CHANG L B , LI J S , CHEN S Y . Initial alignment by attitude estimation for strapdown inertial navigation systems[J]. IEEE Trans.on Instrumentation and Measurement, 2015, 64 (3): 784- 794.
doi: 10.1109/TIM.2014.2355652 |
| 18 |
BAI S Y , LAI J Z , LYU P , et al. A system-level self-calibration method for installation errors in a dual-axis rotational inertial navigation system[J]. Sensors, 2019, 19 (18): 4005.
doi: 10.3390/s19184005 |
| 19 |
WANG L , WU W Q , WEI G , et al. Navigation information fusion in a redundant marine rotational inertial navigation system configuration[J]. Journal of Navigation, 2018, 71 (6): 1531- 1552.
doi: 10.1017/S0373463318000322 |
| 20 | SONG N F , CAI Q Z , YANG G L , et al. Analysis and calibration of the mounting errors between inertial measurement unit and turntable in dual-axis rotational inertial navigation system[J]. Measurement Science and Technology, 2013, 24 (11): 5002. |
| 21 | LAHHAM J I, BRAZELL J R. Acoustic noise reduction in the MK 49 ship's inertial navigation system (SINS)[C]//Proc. of the IEEE PLANS 92 Position Location and Navigation Symposium Record, 1992: 32-39. |
| 22 | LEVINSON E. The next generation marine inertial navigator is here now[C]//Proc. of the IEEE Position Location and Navigation Symp, 1994: 121-127. |
| 23 | LEVINSON E. Laser gyro potential for long endurance marine navigation[C]//Proc. of the IEEE Position Location Navigation Symp, 1980: 115-129. |
| 24 | HECKMAN D W, BARETELA L M. Improved affordability of high precision submarine inertial navigation by insertion of rapidly developing fiber optic gyro technology[C]//Proc. of the IEEE Position Location and Navigation Symp, 2000: 404-410. |
| 25 | 袁保伦. 四频激光陀螺旋转式惯导系统研究[D]. 长沙: 国防科技大学, 2007. |
| YUAN B L. Rotation navigation system based on four-mode differential laser gyro[D]. Changsha: National University of Defense Technology, 2007. | |
| 26 | 秦冲, 陈家斌, 韩勇强, 等. 双轴旋转式激光捷联惯导系统的转位方案研究[J]. 导航定位与授时, 2016, 3 (4): 19- 24. |
| 1 |
CHANG L B , QIN F J , XU J N . Strapdown inertial navigation system initial alignment based on group of double direct spatial isometries[J]. IEEE Sensors Journal, 2022, 22 (1): 803- 818.
doi: 10.1109/JSEN.2021.3108497 |
| 2 | SHI J , YU B G , JIA H N , et al. A robust and adaptive unscented Kalman filter for the air fine alignment of the strapdown inertial navigation system/GPS[J]. International Journal of Aero -space and Mechanical Engineering, 2021, 15 (2): 80- 85. |
| 3 |
SONG J C , YANG S X , XIONG F F . Control failure of the roll-isolated inertial navigation system under large pitch angle[J]. Chinese Journal of Aeronautics, 2020, 33 (10): 2707- 2715.
doi: 10.1016/j.cja.2019.08.026 |
| 4 |
YU X D , WANG Z , FAN H , et al. Suppression of the G-sensitive drift of laser gyro in dual-axis rotational inertial navigation system[J]. Journal of System Engineering and Electronics, 2021, 32 (4): 822- 830.
doi: 10.23919/JSEE.2021.000071 |
| 5 |
CHANG L B , DI J B , QIN F J . Inertial based integration with transformed INS mechanization in Earth frame[J]. IEEE/ASME Trans.on Mechatronics, 2022, 27 (3): 1738- 1749.
doi: 10.1109/TMECH.2021.3090428 |
| 6 |
纪志农, 刘冲, 蔡善军, 等. 一种改进的双轴旋转惯导系统十六位置旋转调制方案[J]. 中国惯性技术学报, 2013, 21 (1): 46- 50.
doi: 10.3969/j.issn.1005-6734.2013.01.012 |
| 26 | QIN C , CHEN J B , HAN Y Q , et al. Research on rotating scheme for dual-axis rotation laser SINS[J]. Navigation Positioning & Timing, 2016, 3 (4): 19- 24. |
| 27 | ZHA F , CHANG L B , HE H Y . Comprehensive error compensation for dual-axis rotational inertial navigation system[J]. IEEE Sensors Journal, 2020, 20 (7): 3788- 3802. |
| 28 | 唐江河, 李文耀, 詹双豪, 等. 一种外环水平结构双轴光纤惯导系统旋转方案设计方法[J]. 导航定位与授时, 2016, 3 (4): 1- 8. |
| TANG J H , LI W Y , ZHAN S H , et al. Rotation scheme design method for dual-axis INS with horizontal outer-axis structure[J]. Navigation Positioning & Timing, 2016, 3 (4): 1- 8. | |
| 29 | FAN H Y , XIE Y P , WANG Z C , et al. A unified scheme for rotation modulation and self-calibration of dual-axis rotating SINS[J]. Measurement Science and Technology, 2021, 32 (11): 115113. |
| 30 | 孙枫, 孙伟, 郭真. 基于IMU旋转的捷联惯导系统自补偿方法[J]. 仪器仪表学报, 2009, 30 (12): 2511- 2517. |
| SUN F , SUN W , GUO Z . Auto-compensation method of SINS based on IMU rotation[J]. Chinese Journal of Scientific Instrument, 2009, 30 (12): 2511- 2517. |
| [1] | 胥涯杰, 鲜勇, 李邦杰, 任乐亮, 李少朋, 郭玮林. 基于神经网络的高超声速飞行器惯导系统精度提高方法[J]. 系统工程与电子技术, 2022, 44(4): 1301-1309. |
| [2] | 孙兵, 阮怀林, 吴晨曦, 吴世龙, 钟华. 幅度相位误差条件下的互质阵列DOA估计方法[J]. 系统工程与电子技术, 2021, 43(12): 3488-3494. |
| [3] | 徐志浩, 周召发, 常振军, 徐梓皓. 载体运动学辅助的双轴旋转调制惯性导航算法[J]. 系统工程与电子技术, 2020, 42(9): 2066-2070. |
| [4] | 杨其, 刘新学, 孟少飞, 刘庆宝. 舱内动环境对捷联惯导外杆臂误差补偿影响机理分析[J]. 系统工程与电子技术, 2018, 40(3): 630-634. |
| [5] | 程建华, 牟宏杰, 孙湘钰, 陈岱岱. 捷联惯导四面体冗余配置的双轴旋转调制方法[J]. 系统工程与电子技术, 2017, 39(8): 1801-1807. |
| [6] | 赵琳, 李久顺, 程建华, 贾春, 王秋帆. 基于延时对准船用捷联惯导舒勒振荡抑制方法[J]. 系统工程与电子技术, 2016, 38(10): 2375-2380. |
| [7] | 鲁天宇, 尹健, 夏群利, 鄢琴涛, 朱振虹. 基于波束角误差补偿的相控阵导引头解耦算法[J]. 系统工程与电子技术, 2015, 37(9): 2123-2128. |
| [8] | 刘洁瑜, 蔚国强, 杨建业. 双轴连续旋转激光捷联惯导误差高精度补偿方法[J]. 系统工程与电子技术, 2015, 37(1): 148-154. |
| [9] | 李克玉, 田福庆, 罗荣. 基于SCKF的光电跟瞄系统等效复合控制[J]. Journal of Systems Engineering and Electronics, 2013, 35(7): 1508-1513. |
| [10] | 郭文成, 师五喜, 郭利进. 一类不确定非线性系统的自适应模糊控制[J]. Journal of Systems Engineering and Electronics, 2010, 32(2): 351-354. |
| [11] | 安道祥, 王亮, 黄晓涛, 周智敏 . 基于SPGA算法的低频超宽带 SAR运动补偿方法[J]. Journal of Systems Engineering and Electronics, 2010, 32(2): 260-265. |
| [12] | 唐晓青, 向茂生, 吴一戎. 基于回波数据的机载双天线InSAR运动补偿[J]. Journal of Systems Engineering and Electronics, 2009, 31(10): 2311-2316. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||