
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (8): 2521-2532.doi: 10.12305/j.issn.1001-506X.2023.08.27
张睿, 奔粤阳, 刘利强, 王坤, 侯靓, 邱天
收稿日期:2022-06-21
出版日期:2023-07-25
发布日期:2023-08-03
通讯作者:
奔粤阳
作者简介:张睿(1998—), 男, 硕士研究生, 主要研究方向为惯性导航系统标定技术基金资助:Rui ZHANG, Yueyang BEN, Liqiang LIU, Kun WANG, Liang HOU, Tian QIU
Received:2022-06-21
Online:2023-07-25
Published:2023-08-03
Contact:
Yueyang BEN
摘要:
捷联惯导系统的现场标定使用系统级标定方法, 由于可观测度较小的状态量不能用卡尔曼滤波辨识估计误差参数, 因此提出一种基于状态量正交基的可观测度计算方法, 并根据此方法设计出一种提高全状态量可观测度的转位方案。在转动过程中测量每个时刻静基座惯性导航的速度误差, 使用卡尔曼滤波器辨识出全状态量误差参数。经实验验证, 对比未设置转位方案的现场标定结果, 所提现场标定方法不仅能提高全状态量可观测度, 而且对系统级标定的结果也有提高, 具有较好的工程实用性。
中图分类号:
张睿, 奔粤阳, 刘利强, 王坤, 侯靓, 邱天. 捷联惯导系统全状态量现场标定方法[J]. 系统工程与电子技术, 2023, 45(8): 2521-2532.
Rui ZHANG, Yueyang BEN, Liqiang LIU, Kun WANG, Liang HOU, Tian QIU. Field calibration method of full state variables for strapdown inertial navigation system[J]. Systems Engineering and Electronics, 2023, 45(8): 2521-2532.
表1
绕x轴转动3次各状态量的可观测度"
| 状态量 | 转动一次 | 转动两次 | 转动三次 |
| εx/(°/h) | 1.671 | 284.711 | 1.650×103 |
| εy/(°/h) | 0.091 | 13.639 | 304.403 |
| εz/(°/h) | 0.063 | 179.117 | 1.734×103 |
| Δx/μg | 1.140×10-5 | 0.006 | 0.529 |
| Δy/μg | 0.006 | 0.177 | 0.310 |
| Δz/μg | 0.008 | 0.032 | 0.539 |
| Kgx/ppm | 0.597 | 8.934 | 17.838 |
| Egyx/(″) | 0.002 | 1.250 | 14.276 |
| Egzx/(″) | 0.002 | 2.152 | 28.397 |
| Egxy/(″) | 1.094×10-4 | 82.451 | 156.938 |
| Kgy/ppm | 1.027×10-6 | 0.963 | 1.147 |
| Egzy/(″) | 2.758×10-7 | 24.635 | 146.249 |
| Egxz/(″) | 4.573×10-4 | 0.019 | 92.586 |
| Egyz/(″) | 2.825×10-7 | 5.487×10-4 | 111.916 |
| Kgz/ppm | 1.024×10-6 | 0.011 | 60.843 |
| Kax/ppm | 5.648×10-8 | 1.691×10-5 | 3.804 |
| Eayx/(″) | 2.441×10-6 | 0.027 | 3.002 |
| Eazx/(″) | 3.232×10-6 | 1.072×10-4 | 3.146 |
| Eaxy/(″) | 0.002 | 0.356 | 5.071 |
| Kay/ppm | 0.111 | 2.440 | 3.987 |
| Eazy/(″) | 2.455×10-7 | 1.562 | 5.519 |
| Eaxz/(″) | 0.001 | 0.359 | 5.125 |
| Eayz/(″) | 2.455×10-7 | 1.378 | 3.037 |
| Kaz/ppm | 0.085 | 2.510 | 3.636 |
| Ka2x/(μg/g2) | 1.605×10-11 | 4.146×10-6 | 35.487 |
| Ka2y/(μg/g2) | 1.654 | 17.826 | 34.681 |
| Ka2z/(μg/g2) | 0.962 | 17.426 | 30.055 |
表2
3种转动次序误差参数的可观测度"
| 状态量 | xyz | xzy | yxz |
| εx/(°/h) | 1.650×103 | 1.412×103 | 293.278 |
| εy/(°/h) | 304.403 | 1.361×103 | 1.649×103 |
| εz/(°/h) | 1.734×103 | 1.997×103 | 1.724×103 |
| Δx/μg | 0.529 | 0.501 | 0.312 |
| Δy/μg | 0.310 | 0.484 | 0.590 |
| Δz/μg | 0.539 | 0.504 | 0.595 |
| Kgx/ppm | 17.838 | 19.379 | 1.377 |
| Egyx/(″) | 14.276 | 14.142 | 160.514 |
| Egzx/(″) | 28.397 | 29.801 | 163.561 |
| Egxy/(″) | 156.938 | 105.465 | 15.174 |
| Kgy/ppm | 1.147 | 98.902 | 17.920 |
| Egzy/(″) | 146.249 | 99.910 | 30.960 |
| Egxz/(″) | 92.586 | 55.976 | 114.867 |
| Egyz/(″) | 111.916 | 69.792 | 99.790 |
| Kgz/ppm | 60.843 | 57.637 | 61.039 |
| Kax/ppm | 3.804 | 4.416 | 3.996 |
| Eayx/(″) | 3.002 | 4.944 | 5.594 |
| Eazx/(″) | 3.146 | 5.157 | 6.035 |
| Eaxy/(″) | 5.071 | 4.772 | 3.014 |
| Kay/ppm | 3.987 | 4.647 | 3.867 |
| Eazy/(″) | 5.519 | 5.379 | 3.152 |
| Eaxz/(″) | 5.125 | 4.727 | 3.066 |
| Eayz/(″) | 3.037 | 4.544 | 5.586 |
| Kaz/ppm | 3.636 | 4.667 | 3.584 |
| Ka2x/(μg/g2) | 35.487 | 63.204 | 35.225 |
| Ka2y/(μg/g2) | 34.681 | 54.684 | 35.151 |
| Ka2z/(μg/g2) | 30.055 | 55.214 | 29.967 |
表3
其余3种转动次序误差参数的可观测度"
| 状态量 | yzx | zxy | zyx |
| εx/(°/h) | 1.503×103 | 1.617×103 | 1.209×103 |
| εy/(°/h) | 1.433×103 | 852.538 | 3.894×103 |
| εz/(°/h) | 2.101×103 | 926.849 | 680.545 |
| Δx/μg | 0.468 | 0.047 | 0.500 |
| Δy/μg | 0.466 | 0.483 | 0.039 |
| Δz/μg | 0.427 | 0.441 | 0.421 |
| Kgx/ppm | 112.513 | 16.739 | 1.146 |
| Egyx/(″) | 111.234 | 10.034 | 195.471 |
| Egzx/(″) | 98.915 | 13.540 | 83.377 |
| Egxy/(″) | 14.389 | 194.768 | 25.275 |
| Kgy/ppm | 23.022 | 1.676 | 16.571 |
| Egzy/(″) | 29.980 | 118.956 | 29.710 |
| Egxz/(″) | 87.479 | 41.815 | 22.316 |
| Egyz/(″) | 69.542 | 25.359 | 36.595 |
| Kgz/ppm | 45.749 | 0.054 | 0.041 |
| Kax/ppm | 4.735 | 8.443×10-5 | 3.658 |
| Eayx/(″) | 4.963 | 0.030 | 1.129 |
| Eazx/(″) | 6.114 | 0.018 | 4.468 |
| Eaxy/(″) | 4.971 | 1.023 | 0.058 |
| Kay/ppm | 4.820 | 3.690 | 4.910×10-5 |
| Eazy/(″) | 5.687 | 4.380 | 0.043 |
| Eaxz/(″) | 5.330 | 1.021 | 4.859 |
| Eayz/(″) | 4.961 | 4.795 | 2.391 |
| Kaz/ppm | 245.849 | 3.466 | 3.455 |
| Ka2x/(μg/g2) | 36.784 | 1.086×10-5 | 31.206 |
| Ka2y/(μg/g2) | 43.079 | 30.851 | 3.621×10-5 |
| Ka2z/(μg/g2) | 41.161 | 27.884 | 27.278 |
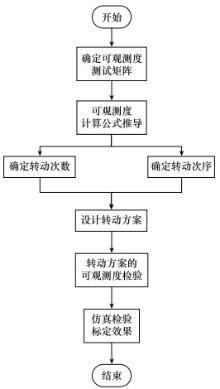
图1
转位方案设计流程图"
表4
新设计的标定转位方案"
| 转动次序 | 三轴指向 | 转动90° |
| 1 | 东北天 | +ox |
| 2 | 东地北 | +ox |
| 3 | 东南地 | +ox |
| 4 | 东天南 | -ox |
| 5 | 东南地 | -ox |
| 6 | 东地北 | -ox |
| 7 | 东北天 | +oy |
| 8 | 天北西 | +oz |
| 9 | 南天西 | +oz |
| 10 | 地南西 | +oz |
| 11 | 北地西 | -oz |
| 12 | 地南西 | -oz |
| 13 | 南天西 | -oz |
| 14 | 天北西 | +oy |
| 15 | 西北地 | +ox |
| 16 | 西天北 | +ox |
| 17 | 西南天 | +ox |
| 18 | 西地南 | -ox |
| 19 | 西南天 | -ox |
| 20 | 西天北 | -ox |
| 21 | 西北地 | -oy |
| 22 | 天北西 | -oy |
| 23 | 东北天 | 停止 |
表5
标定真实值设定"
| 状态量 | 真实值 |
| εx/(°/h) | 0.25 |
| εy/(°/h) | 0.25 |
| εz/(°/h) | 0.25 |
| Δx/μg | 25 |
| Δy/μg | 25 |
| Δz/μg | 25 |
| Kgx/ppm | 20 |
| Egyx/(″) | -30 |
| Egzx/(″) | -50 |
| Egxy/(″) | -10 |
| Kgy/ppm | 20 |
| Egzy/(″) | -60 |
| Egxz/(″) | -20 |
| Egyz/(″) | -40 |
| Kgz/ppm | 20 |
| Kax/ppm | 20 |
| Eayx/(″) | -10 |
| Eazx/(″) | -20 |
| Eaxy/(″) | 0 |
| Kay/ppm | 20 |
| Eazy/(″) | -30 |
| Eaxz/(″) | 0 |
| Eayz/(″) | 0 |
| Kaz/ppm | 20 |
| Ka2x/(μg/g2) | 25 |
| Ka2y/(μg/g2) | 25 |
| Ka2z/(μg/g2) | 25 |
表6
标定转位方案"
| 转动次序 | 三轴指向 | 转动90° |
| 1 | 东北天 | +oy |
| 2 | 天北西 | +oy |
| 3 | 西北地 | +oy |
| 4 | 地北东 | -oy |
| 5 | 西北地 | -oy |
| 6 | 天北西 | -oy |
| 7 | 东北天 | +oz |
| 8 | 南东天 | +ox |
| 9 | 南地东 | +ox |
| 10 | 南西地 | +ox |
| 11 | 南天西 | -ox |
| 12 | 南西地 | -ox |
| 13 | 南地东 | -ox |
| 14 | 南东天 | +oz |
| 15 | 西南天 | +oz |
| 16 | 北西天 | -oz |
| 17 | 西南天 | -oz |
| 18 | 南东天 | -oz |
| 19 | 东北天 | 停止 |
表7
传统转位方案的可观测度计算结果"
| 状态量 | 可观测度 |
| εx/(°/h) | 6.021×105 |
| εy/(°/h) | 4.354×105 |
| εz/(°/h) | 1.056×105 |
| Δx/μg | 495.414 |
| Δy/μg | 270.582 |
| Δz/μg | 228.641 |
| Kgx/ppm | 1.767×104 |
| Egyx/(″) | 4.546×104 |
| Egzx/(″) | 3.247×104 |
| Egxy/(″) | 1.518×104 |
| Kgy/ppm | 5.724×103 |
| Egzy/(″) | 9.801×103 |
| Egxz/(″) | 7.864×104 |
| Egyz/(″) | 9.436×104 |
| Kgz/ppm | 1.314×103 |
| Kax/ppm | 2.980×103 |
| Eayx/(″) | 1.334×103 |
| Eazx/(″) | 1.473×103 |
| Eaxy/(″) | 369.099 |
| Kay/ppm | 2.882×103 |
| Eazy/(″) | 1.423×103 |
| Eaxz/(″) | 1.417×103 |
| Eayz/(″) | 2.121×103 |
| Kaz/ppm | 4.195×103 |
| Ka2x/(μg/g2) | 1.858×104 |
| Ka2y/(μg/g2) | 1.770×104 |
| Ka2z/(μg/g2) | 2.288×104 |
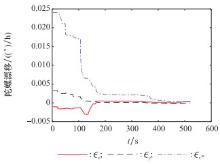
图2
陀螺漂移标定"

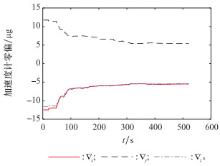
图3
加速度计零偏标定"

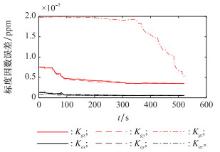
图4
标度因数误差标定"
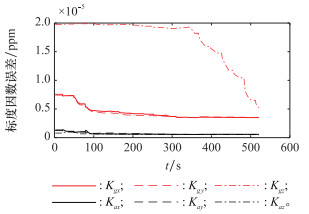
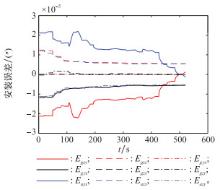
图5
安装误差标定"
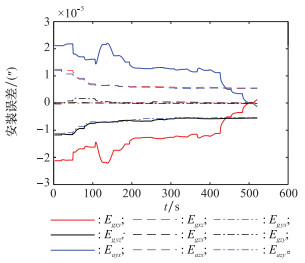
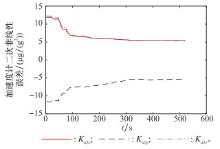
图6
二次非线性误差标定"

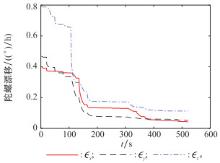
图7
陀螺漂移协方差"


图8
加速度计零偏协方差"

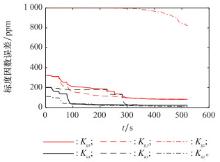
图9
标度因数误差协方差"

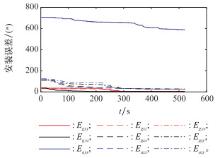
图10
安装误差协方差"
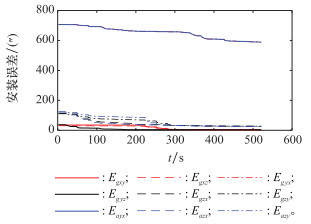
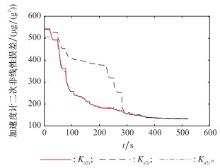
图11
二次非线性误差协方差"
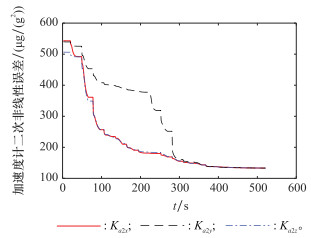
表8
转位可观测度计算结果"
| 状态量 | 可观测度 |
| εx/(°/h) | 5.559×105 |
| εy/(°/h) | 9.992×105 |
| εz/(°/h) | 1.015×106 |
| Δx/μg | 1.186×103 |
| Δy/μg | 452.664 |
| Δz/μg | 717.058 |
| Kgx/ppm | 1.297×105 |
| Egyx/(″) | 9.366×104 |
| Egzx/(″) | 1.029×105 |
| Egxy/(″) | 5.535×104 |
| Kgy/ppm | 8.352×104 |
| Egzy/(″) | 7.521×104 |
| Egxz/(″) | 5.551×104 |
| Egyz/(″) | 5.398×104 |
| Kgz/ppm | 7.991×104 |
| Kax/ppm | 4.977×103 |
| Eayx/(″) | 1.387×103 |
| Eazx/(″) | 2.478×103 |
| Eaxy/(″) | 2.794×103 |
| Kay/ppm | 4.697×103 |
| Eazy/(″) | 1.885×103 |
| Eaxz/(″) | 2.592×103 |
| Eayz/(″) | 1.642×103 |
| Kaz/ppm | 4.596×103 |
| Ka2x/(μg/g2) | 2.455×104 |
| Ka2y/(μg/g2) | 3.500×104 |
| Ka2z/(μg/g2) | 3.314×104 |
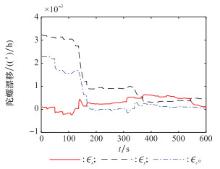
图12
陀螺漂移标定"
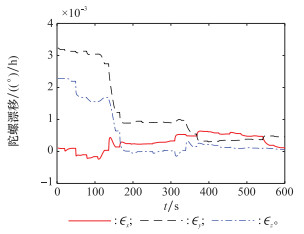
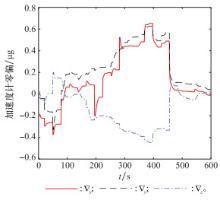
图13
加速度计零偏标定"

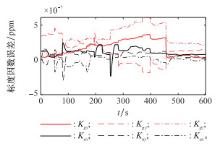
图14
标度因数误差标定"
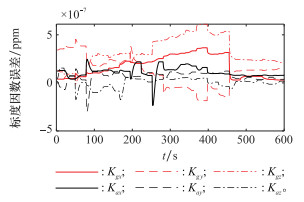
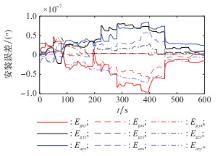
图15
安装误差标定"

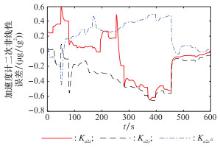
图16
二次非线性误差标定"
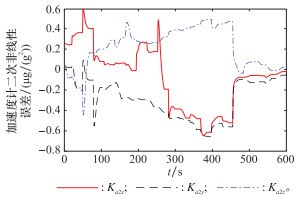
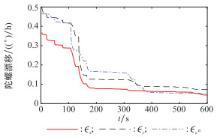
图17
陀螺漂移协方差"

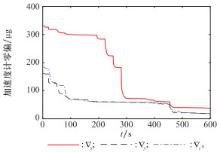
图18
加速度计零偏协方差"

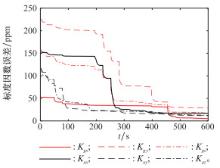
图19
标度因数误差协方差"
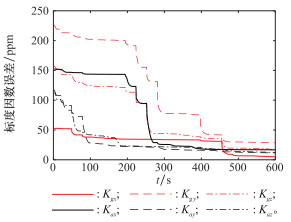
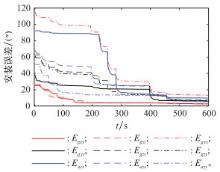
图20
安装误差协方差"

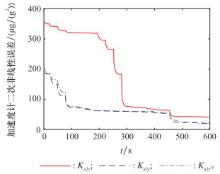
图21
二次非线性误差协方差"

| 1 | XU Y , ZHU X H , SU Y . A novel network calibration method for inertial measurement units[J]. Proceedings of the Institution of Mechanical Engineers Part G-Journal of Aerospace Engineering, 2014, 229 (7): 16- 18. |
| 2 |
杨小康, 严恭敏, 李四海. 一种锚泊条件下捷联惯导系统级标定方法[J]. 中国惯性技术学报, 2020, 28 (1): 1- 7.
doi: 10.13695/j.cnki.12-1222/o3.2020.01.001 |
|
YANG X K , YAN G M , LI S H . A system-lever calibration method of SIMU under the anchoring condition[J]. Journal of Chinese Inertial Technology, 2020, 28 (1): 1- 7.
doi: 10.13695/j.cnki.12-1222/o3.2020.01.001 |
|
| 3 | 刘鹏, 任一峰, 张亚, 等. 惯性导航系统可观测性分析与可观测状态确定的图方法[J]. 控制理论与应用, 2020, 37 (1): 98- 106. |
| LIU P , REN Y F , ZHANG Y , et al. Graphic method for observability and observable states analysis of inertial navigation systems[J]. Control Theory & Applications, 2020, 37 (1): 98- 106. | |
| 4 | 周广涛, 邵剑波, 韩少卫, 等. SVD可观测度分析方法的改进及组合导航系统中的应用[J]. 哈尔滨工业大学学报, 2020, 52 (4): 52- 57. |
| ZHOU G T , SHAO J B , HAN S W , et al. Improvement of observable degree analysis method based on SVD and application in integrated navigation[J]. Journal of Harbin Institute of Technology, 2020, 52 (4): 52- 57. | |
| 5 |
LIANG Y , HAN L , DONG X W , et al. An quantitative method for observability analysis and its application in SINS calibration[J]. Aerospace Science and Technology, 2020, 103, 105881.
doi: 10.1016/j.ast.2020.105881 |
| 6 | MIAO J S, WANG C, REN Y, et al. Fast and high-accuracy systematic calibration of inertial devices based on IMU off-axis transposition[C]//Proc. of the Global Intelligence Industry Conference, 2018. |
| 7 |
WANG M S , WU W Q , ZHOU P Y , et al. State transformation extended Kalman filter for GPS/SINS tightly coupled integration[J]. GPS Solutions, 2018, 22, 112.
doi: 10.1007/s10291-018-0773-3 |
| 8 |
XU B , WANG L Z , DUAN T H . A novel hybrid calibration method for FOG-based IMU[J]. Measurement, 2019, 147, 106900.
doi: 10.1016/j.measurement.2019.106900 |
| 9 | 王大轶, 李嘉兴, 董天舒, 等. 基于航天器可观测性理论的多源融合自主导航技术[J]. 前瞻科技, 2022, 1 (1): 146- 158. |
| WANG D Y , LI J X , DONG T S , et al. Multi-source fusion autonomous navigation technologies based on spacecraft observability theory[J]. Science and Technology Foresight, 2022, 1 (1): 146- 158. | |
| 10 |
SUN W , WANG D X , XU L W , et al. MEMS-based rotary strapdown inertial navigation system[J]. Measurement, 2013, 46 (8): 2585- 2596.
doi: 10.1016/j.measurement.2013.04.035 |
| 11 | CHANG J C, DUAN D Z, YU F, et al. A swing online calibration method of ship-based FOG-IMU[C]//Proc. of the Forum on Cooperative Positioning and Service, 2017: 33-38. |
| 12 | WANG Z H , CHEN X H . Adaptive optimization online IMU self-calibration method for visual-inertial navigation systems[J]. Measurement, 2021, 180 (9): 109478. |
| 13 | LI D , XU J N , ZHU B , et al. A calibration method of DVL in integrated navigation system based on particle swarm optimization[J]. Measurement, 2022, 187 (1): 1- 12. |
| 14 |
WEN Z Y , YANG G L , CAI Q Z . An improved calibration method for the IMU biases utilizing KF-based AdaGrad algorithm[J]. Sensors, 2021, 21 (15): 5055.
doi: 10.3390/s21155055 |
| 15 |
GAO W , ZHANG Y , WANG J G . Research on initial alignment and self-calibration of rotary strapdown inertial navigation systems[J]. Sensors, 2015, 15 (2): 3154- 3171.
doi: 10.3390/s150203154 |
| 16 |
LI K , CHEN Y P , WANG L C . Online self-calibration research of single-axis rotational inertial navigation system[J]. Measurement, 2018, 129, 633- 641.
doi: 10.1016/j.measurement.2018.07.065 |
| 17 | SHUANG D , WEI S . Improving observability of an inertial system by rotary motions of an IMU[J]. Sensors, 2017, 17 (4): 69- 78. |
| 18 | BAI S Y , LAI J Z , LYU P , et al. A system-level self-calibration method for installation errors in a dual-axis rotational inertial navigation system[J]. Sensors, 2019, 19 (18): 40- 45. |
| 19 | GAO K , REN S Q , CHEN X J , et al. An optimization-based initial alignment and calibration algorithm of land-vehicle SINS in-motion[J]. Sensors, 2018, 18 (19): 20- 28. |
| 20 | HU Z T , CHEN T X , GE Q B , et al. Observable degree ana-lysis for multi-sensor fusion system[J]. Sensors, 2018, 18 (19): 41- 47. |
| 21 | FELIPE S , ELDER H , WALDEMAR L F . On the error state selection for stationary SINS alignment and calibration Kalman filters-Part Ⅱ: observability and estimability analysis[J]. Sensors, 2017, 17 (3): 43- 49. |
| 22 | ITZIK K , ROEE D , PASSARO V . Observability analysis of DVL/PS aided INS for a maneuvering AUV[J]. Sensors, 2015, 15 (10): 18- 37. |
| 23 | LYU D , WANG J , HE Z , et al. Landmark-based inertial navigation system for autonomous navigation of missile platform[J]. Sensors, 2020, 20 (11): 70- 83. |
| 24 | FENG G H , WU W Q , WANG J L . Observability analysis of a matrix Kalman filter-based navigation system using visual/inertial/magnetic sensors[J]. Sensors, 2012, 12 (7): 77- 94. |
| 25 | CHEN W H , YANG Z , GU S S , et al. Adaptive transfer alignment method based on the observability analysis for airborne pod strapdown inertial navigation system[J]. Scientific Reports, 2022, 12 (1): 1- 14. |
| 26 | KOLLER T L , FRESS U . State observability through prior knowledge: analysis of the height map prior for track cycling[J]. Sensors, 2020, 20 (9): 24- 38. |
| 27 | YANG Y Q , ZHANG C X , LU J Z . Local observability analysis of star sensor installation errors in a SINS/CNS integration system for near-earth flight vehicles[J]. Sensors, 2017, 17 (1): 1- 13. |
| 28 | FAN C , HU X P , HE X F , et al. Observability analysis of a MEMS INS/GPS integration system with gyroscope G-sensitivity errors[J]. Sensors, 2014, 14 (9): 6- 16. |
| 29 | JIANG W P , WANG L , NIU X J , et al. High-precision image aided inertial navigation with known features: observability analysis and performance evaluation[J]. Sensors, 2014, 14 (10): 371- 401. |
| 30 | BAI S Y , LAI J Z , LYU P , et al. A system-level self-calibration method for installation errors in a dual-axis rotational inertial navigation system[J]. Sensors, 2019, 19 (18): 4005. |
| 31 | ADRIANO F , FELIPE O S , ETTORE A B . Influence of integration schemes and maneuvers on the initial alignment and calibration of AUVS: observability and degree of observability analysis[J]. Sensors, 2022, 22 (9): 3287. |
| [1] | 徐志浩, 周召发, 常振军, 徐梓皓. 载体运动学辅助的双轴旋转调制惯性导航算法[J]. 系统工程与电子技术, 2020, 42(9): 2066-2070. |
| [2] | 卢雨, 周正. 空基外辐射源定位系统的观测站航迹优化[J]. 系统工程与电子技术, 2020, 42(12): 2708-2715. |
| [3] | 李建文, 刘华伟, 吴高龙. 基于低维SOM的可观测度分析方法及其应用[J]. Journal of Systems Engineering and Electronics, 2009, 31(7): 1728-1732. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||