
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (4): 1177-1184.doi: 10.12305/j.issn.1001-506X.2023.04.26
• 制导、导航与控制 • 上一篇
李方俊1,*, 王生捷1, 李俊峰2, 李浩2, 崔臣君1
收稿日期:2022-01-12
出版日期:2023-03-29
发布日期:2023-03-28
通讯作者:
李方俊
作者简介:李方俊(1993—), 男, 博士研究生, 主要研究方向为大惯量伺服系统设计、多电机协同控制Fangjun LI1,*, Shengjie WANG1, Junfeng LI2, Hao LI2, Chenjun CUI1
Received:2022-01-12
Online:2023-03-29
Published:2023-03-28
Contact:
Fangjun LI
摘要:
针对一种含齿隙随动系统高精度、快响应、鲁棒能力强的控制需求, 提出了一种基于新型滑模趋近率的鲁棒控制策略。首先在位置环设计过程中引入了积分非奇异终端滑模控制器, 能有效克服系统结构参数的变化, 并提高了响应能力; 其次利用线性扩张状态观测器将传动结构中的齿隙因素视作外在扰动之一进行补偿, 增加了系统的稳定性与鲁棒能力; 最后基于设计的新型滑模趋近率克服了控制量的抖动问题, 通过联合仿真实验证明了所提出方法的有效性。
中图分类号:
李方俊, 王生捷, 李俊峰, 李浩, 崔臣君. 基于新型趋近率的含齿隙随动系统鲁棒控制[J]. 系统工程与电子技术, 2023, 45(4): 1177-1184.
Fangjun LI, Shengjie WANG, Junfeng LI, Hao LI, Chenjun CUI. Robust control of servo system with backlash based on new reaching law[J]. Systems Engineering and Electronics, 2023, 45(4): 1177-1184.
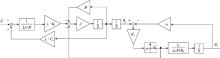
图1
含齿隙随动系统传动部分传递函数框图"

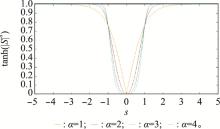
图2
tanh(|S|α)函数示意图"
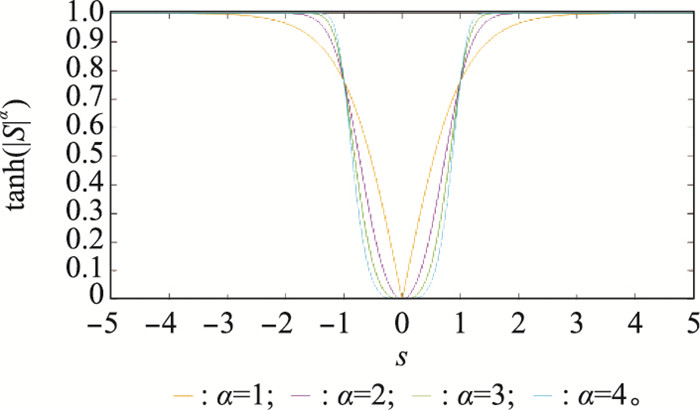
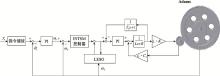
图3
联合仿真示意图"
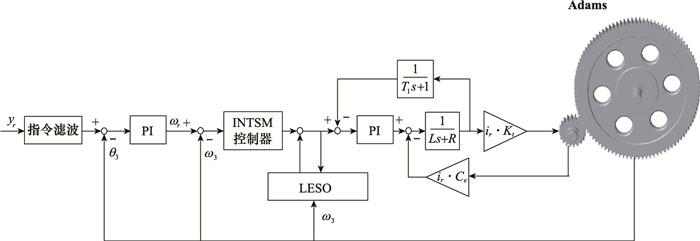
表1
仿真所用电机及减速器参数"
| 参数 | 数值 |
| 定子电感L/mH | 4.25 |
| 定子电阻R/Ω | 0.26 |
| 力矩系数Kt/(N·m·A-1) | 1.066 |
| 反电势系数Ce/(V/(rad·s-1)) | 0.8 |
| 减速器减速比ir | 10 |
| 齿轮结构传动比im | 5 |
| 负载转动惯量Jm/(kg·m2) | 22.776 |
| 摩擦系数Bm/(N·m·s·rad-1) | 0.01 |
表2
PID算法控制器参数"
| 参数 | 数值 |
| 位置环比例系数 | 70 |
| 速度环比例系数 | 14 |
| 速度环积分系数 | 0.1 |
| 电流环比例系数 | 0.212 |
| 电流环积分系数 | 13 |
表3
指数趋近率控制器参数"
| 参数 | 数值 |
| 位置环比例系数 | 1.65 |
| LESO系数λ1 | 12 |
| LESO系数λ2 | 800 |
| INTSM系数β | 1 |
| INTSM系数p/q | 5/3 |
| INTSM系数D | 1 000 |
| INTSM系数k | 1 000 |
表4
新型趋近率控制器参数"
| 参数 | 数值 |
| 位置环比例系数 | 1.65 |
| LESO系数λ1 | 12 |
| LESO系数λ2 | 800 |
| INTSM系数β | 1 |
| INTSM系数p/q | 5/3 |
| INTSM系数D | 1 000 |
| INTSM系数k | 1 000 |
| INTSM系数α | 7 |
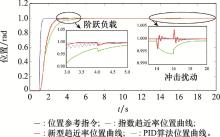
图4
冲击扰动力矩下位置曲线"
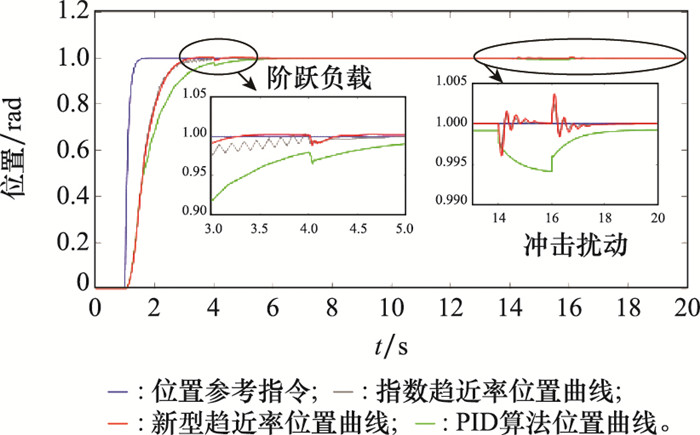
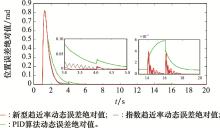
图5
冲击扰动力矩下位置误差曲线"
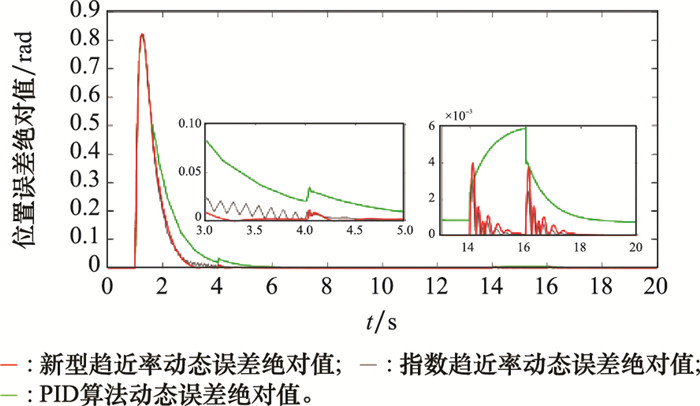
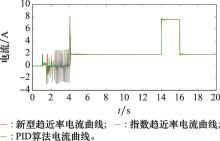
图6
恒定扰动力矩下q轴电流曲线"
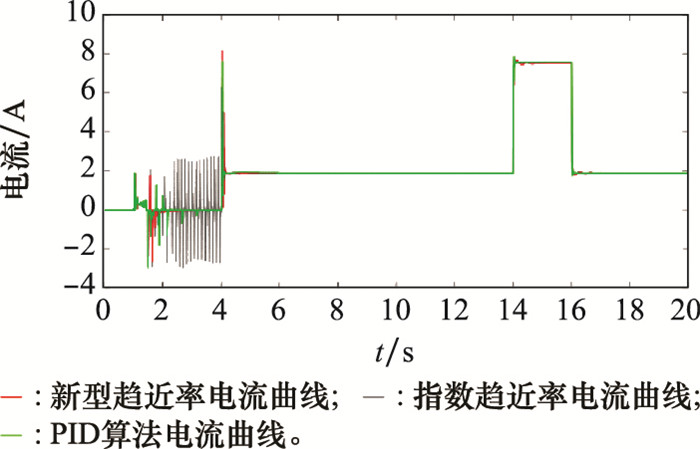

图7
正弦扰动力矩下位置曲线"
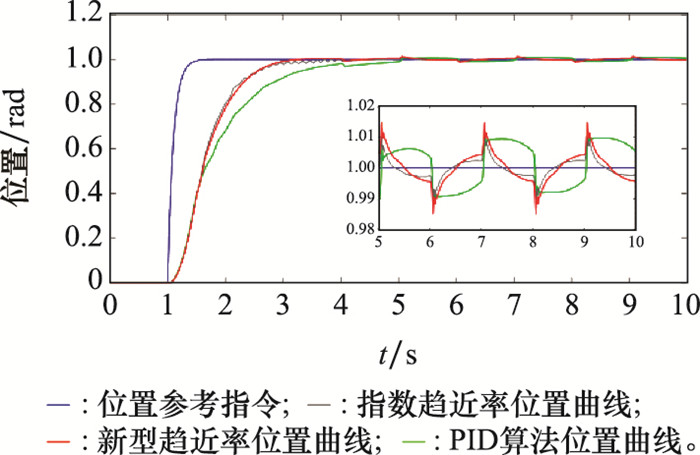
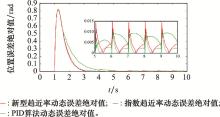
图8
正弦扰动力矩下位置误差曲线"
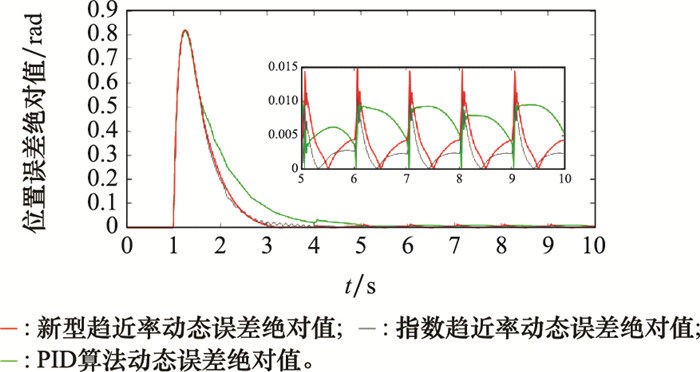
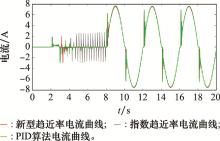
图9
正弦扰动力矩下q轴电流曲线"

表5
冲击扰动力矩仿真实验结果"
| 控制策略 | 加载过程位置偏差最大值/rad | 撤去时位置偏差最大值/rad | 误差减小至0.1%所用时间/s |
| PID方法 | 0.005 1 | 0.002 | 3.92 |
| 指数趋近率控制策略 | 0.002 8 | 0.003 | 0.50 |
| 新型趋近率控制策略 | 0.003 7 | 0.004 | 0.69 |
表6
正弦扰动力矩仿真实验结果"
| 控制策略 | 位置偏差最大值/rad | 误差减小至0.1%所用时间/s |
| PID方法 | 0.012 | 1.040 |
| 指数趋近率控制策略 | 0.013 | 0.335 |
| 新型趋近率控制策略 | 0.015 | 0.459 |
| 1 | 付东学, 赵希梅. 永磁直线同步电机自适应反推全局快速终端滑模控制[J]. 电工技术学报, 2020, 35 (8): 1634- 1641. |
| FU D X , ZHAO X M . Adaptive backstepping global fast terminal sliding mode control for permanent magnet linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2020, 35 (8): 1634- 1641. | |
| 2 | 李玉霞, 王帅, 王建立, 等. 地平主焦点式大视场望远镜的双电机消旋系统[J]. 光学精密工程, 2021, 29 (4): 749- 762. |
| LI Y X , WANG S , WANG J L , et al. Dual-motor de-rotator system of prime focus alt-azimuth telescope with large field of view[J]. Optics and Precision Engineering, 2021, 29 (4): 749- 762. | |
| 3 |
WANG Q W , WANG G L , ZHAO N N , et al. An impedance model-based multiparameter identification method of PMSM for both offline and online conditions[J]. IEEE Trans.on Power Electronics, 2021, 36 (1): 727- 738.
doi: 10.1109/TPEL.2020.3000896 |
| 4 |
QU L Z , QIAO W , QU L Y . An enhanced linear active disturbance rejection rotor position sensorless control for permanent magnet synchronous motors[J]. IEEE Trans.on Power Electronics, 2020, 35 (6): 6175- 6184.
doi: 10.1109/TPEL.2019.2953162 |
| 5 |
YANG Q C , LIU T , WU X , et al. A planetary gear reducer backlash identification based on servo motor current signal and optimized fisher discriminant analysis[J]. ISA Transactions, 2021, 112, 350- 362.
doi: 10.1016/j.isatra.2020.12.016 |
| 6 |
GHANNADI B , SHARIF R R , MCPHEE J . A modified homotopy optimization for parameter identification in dynamic systems with backlash discontinuity[J]. Nonlinear Dynamics, 2019, 95, 57- 72.
doi: 10.1007/s11071-018-4550-1 |
| 7 |
LYU W S , WANG F . Adaptive fuzzy finite-time control for uncertain nonlinear systems with asymmetric actuator backlash[J]. International Journal of Fuzzy Systems, 2019, 21, 50- 59.
doi: 10.1007/s40815-018-0532-1 |
| 8 | 田福庆, 姜尚, 梁伟阁. 含齿隙弹载舵机的全局反步模糊自适应控制[J]. 自动化学报, 2019, 45 (6): 1177- 1185. |
| TIAN F Q , JIANG S , LIANG W G . Global backstepping fuzzy adaptive control for ammunition actuator with backlash[J]. ACTA Automatica Sinica, 2019, 45 (6): 1177- 1185. | |
| 9 |
SEBASTIAN V , MARIO P . Time-domain identification method for detecting mechanical backlash in electrical drives[J]. IEEE Trans.on Industrial Electronics, 2009, 56 (2): 568- 573.
doi: 10.1109/TIE.2008.2003498 |
| 10 |
HAN Y , LIU C , WU J H . Backlash identification for PMSM servo system based on relay feedback[J]. Nonlinear Dynamics, 2016, 84, 2363- 2375.
doi: 10.1007/s11071-016-2650-3 |
| 11 |
RUDERMAN M , FRIDMAN L . Model-free sliding-mode-based detection and estimation of backlash in drives with single encoder[J]. IEEE Trans.on Control Systems Technology, 2021, 29 (2): 812- 817.
doi: 10.1109/TCST.2019.2956914 |
| 12 |
MARGIELEWICZ J , GSKA D , LITAK G . Modelling of gear backlash[J]. Nonlinear Dynamics, 2019, 97, 355- 368.
doi: 10.1007/s11071-019-04973-z |
| 13 |
DIMITRIOS P , MOGENS B , HANS H N , et al. Robust backlash estimation for industrial drive-train systems-theory and validation[J]. IEEE Trans.on Control Systems Technology, 2019, 27 (5): 1847- 1861.
doi: 10.1109/TCST.2018.2837642 |
| 14 | 韩崇伟, 彭超, 石志翔, 等. 基于干扰抑制的含齿隙伺服系统鲁棒控制方法[J]. 系统仿真学报, 2018, 30 (2): 691- 698. |
| HAN C W , PENG C , SHI Z X , et al. Disturbance rejection based robust control approach for servo system with backlash[J]. Journal of System Simulation, 2018, 30 (2): 691- 698. | |
| 15 |
ZHU P K , CHEN Y , LI M , et al. Fractional-order sliding mode position tracking control for servo system with disturbance[J]. ISA Transactions, 2020, 105, 269- 277.
doi: 10.1016/j.isatra.2020.05.032 |
| 16 |
XIE Y L , ZHANG X L , MENG W , et al. Coupled fractional-order sliding mode control and obstacle avoidance of a four-wheeled steerable mobile robot[J]. ISA Transactions, 2021, 108, 282- 294.
doi: 10.1016/j.isatra.2020.08.025 |
| 17 | MA H F , LIU C , LIU Y , et al. Sliding mode control for uncertain discrete time systems based on fractional order reaching law[J]. IET Control Theory & Applications, 2019, 13 (13): 1963- 1970. |
| 18 |
XU W , DIAN R J , LIU Y , et al. Robust flux estimation method for linear induction motors based on improved extended state observers[J]. IEEE Trans.on Power Electronics, 2019, 34 (5): 4628- 4640.
doi: 10.1109/TPEL.2018.2865800 |
| 19 |
LIU C Q , LUO G Z , DUAN X L , et al. Adaptive LADRC-based disturbance rejection method for electromechanical servo system[J]. IEEE Trans.on Industry Applications, 2020, 56 (1): 876- 889.
doi: 10.1109/TIA.2019.2955664 |
| 20 |
LIU Z G , WANG Y Q , LIU S , et al. An approach to suppress low-frequency oscillation by combining extended state observer with model predictive control of EMUS rectifier[J]. IEEE Trans.on Power Electronics, 2019, 34 (10): 10282- 10297.
doi: 10.1109/TPEL.2019.2893491 |
| 21 | LI G F , WU Y J , XU P Y . An observer-based fixed-time position tracking strategy for DC torque motor systems[J]. Mechanical Systems and Signal Processing, 2020, 142 (1): 106774. |
| 22 | 孟思华, 王尧尧, 陈柏, 等. 基于时延估计的绳驱动飞行机械臂模糊非奇异终端滑模飞行控制[J]. 中南大学学报(自然科学版), 2021, 52 (10): 3465- 3474. |
| MENG S H , WANG Y Y , CHEN B , et al. Fuzzy nonsingular terminal sliding mode flying control of cable-driven flying manipulators based on time-delay estimation[J]. Journal of Central South University, 2021, 52 (10): 3465- 3474. | |
| 23 |
ABADI A , AMRAOUI A E , MEKKI H , et al. Robust tracking control of quadrotor based on flatness and active disturbance rejection control[J]. IET Control Theory and Applications, 2020, 14 (8): 1057- 1068.
doi: 10.1049/iet-cta.2019.1363 |
| 24 |
XU Z , ZHANG T R , BAO Y L , et al. A nonlinear extended state observer for rotor position and speed estimation for sensorless IPMSM drives[J]. IEEE Trans.on Power Electronics, 2020, 35 (1): 733- 743.
doi: 10.1109/TPEL.2019.2914119 |
| 25 |
WANG C W , ZHANG Z Y , WANG H , et al. Disturbance observer-based output feedback control of hydraulic servo system considering mismatched uncertainties and internal pressure dynamics stability[J]. IET Control Theory and Applications, 2020, 14 (8): 1046- 1056.
doi: 10.1049/iet-cta.2019.0346 |
| 26 | QU L Z , QIAO W , QU L Y . Active-disturbance-rejection-based sliding-mode current control for permanent-magnet synchronous motors[J]. IEEE Trans.on Power Electronics, 2021, 36 (1): 751- 760. |
| 27 | LIU X D , YU H S . Continuous adaptive integral-type sliding mode control based on disturbance observer for PMSM drives[J]. Nonlinear Dynamics, 2021, 104, 1429- 1441. |
| 28 | WANG Y Q , FENG Y T , ZHANG X G , et al. A new reaching law for antidisturbance sliding-mode control of PMSM speed regulation system[J]. IEEE Trans.on Power Electronics, 2020, 35 (4): 4117- 4126. |
| 29 | 李思远, 陈子坤, 梁曦, 等. 带有齿隙的空间机械臂动力学仿真与试验设计[J]. 测试技术学报, 2017, 31 (1): 17- 23. |
| LI S Y , CHEN Z K , LIANG X , et al. Dynamical simulation and experimental design of space manipulator with backlashes[J]. Journal of Test and Measurement Technology, 2017, 31 (1): 17- 23. | |
| 30 | 蒋潇蓉, 郁家耀, 周君涛, 等. 基于ADAMS的某无后坐炮发射动态仿真分析[J]. 兵器装备工程学报, 2020, 41 (8): 17- 21. |
| JIANG X R , YU J Y , ZHOU J T , et al. Dynamic simulation analysis of a recoilless gun launching based on ADAMS[J]. Journal of Ordnance Equipment Engineering, 2020, 41 (8): 17- 21. | |
| 31 | 周凯红, 郭玉田, 黄思敏. 基于Adams和Matlab的非圆锥齿轮传动机构仿真研究[J]. 机电工程, 2022, 39 (1): 40- 46. |
| ZHOU K H , GUO Y T , HUANG S M . Simulation of non-bevel gear transmission mechanism based on Adams and Matlab[J]. Journal of Mechanical & Electrical Engineering, 2022, 39 (1): 40- 46. |
| [1] | 周梦平, 孟秀云, 刘俊辉. 大落角机动目标逆轨拦截最优滑模制导律设计[J]. 系统工程与电子技术, 2022, 44(9): 2886-2893. |
| [2] | 韦俊宝, 李海燕, 李静. 高超声速飞行器新型攻角约束反演控制[J]. 系统工程与电子技术, 2022, 44(4): 1310-1317. |
| [3] | 杨文奇, 卢建华, 姜旭, 王元鑫. 基于改进ESO的四旋翼姿态自抗扰控制器设计[J]. 系统工程与电子技术, 2022, 44(12): 3792-3799. |
| [4] | 徐海祥, 胡聪, 余文曌, 姚国全. 输入约束下的浮力调节式UUV变深控制[J]. 系统工程与电子技术, 2022, 44(11): 3496-3504. |
| [5] | 王晓海, 孟秀云, 周峰, 邱文杰. 基于偏置比例导引的落角约束滑模制导律[J]. 系统工程与电子技术, 2021, 43(5): 1295-1302. |
| [6] | 郭佳晖, 蒋滨安, 田宗浩. 带有攻击角和视场角约束的制导炮弹导引律设计[J]. 系统工程与电子技术, 2021, 43(4): 1050-1056. |
| [7] | 孙世岩, 姜尚, 田福庆, 梁伟阁. 带多约束的多弹分布式自适应协同导引律[J]. 系统工程与电子技术, 2021, 43(1): 181-190. |
| [8] | 王晓海, 孟秀云, 李传旭. 基于MPC的无人机航迹跟踪控制器设计[J]. 系统工程与电子技术, 2021, 43(1): 191-198. |
| [9] | 宫勋, 付云博, 姜良旭, 曹策, 郭同健. Super-twisting扩张状态观测器在四旋翼飞行器故障重构中的应用[J]. 系统工程与电子技术, 2020, 42(9): 2077-2084. |
| [10] | 张文杰, 鲁天宇, 夏群利. 基于扩张状态观测器的反预警滑模制导律[J]. 系统工程与电子技术, 2019, 41(5): 1087-1093. |
| [11] | 邓英杰, 张显库, 张国庆. 水面舰船动力定位系统ESO输入饱和控制[J]. 系统工程与电子技术, 2019, 41(5): 1110-1117. |
| [12] | 王青, 刘雨昂, 刘晨, 董朝阳. 基于扩张状态观测器的变形机翼抗饱和控制[J]. 系统工程与电子技术, 2019, 41(3): 619-625. |
| [13] | 姜尚, 田福庆, 孙世岩, 梁伟阁, 尤栋. 考虑自动驾驶仪动态特性与攻击角约束的模糊自适应动态面末制导律[J]. 系统工程与电子技术, 2019, 41(2): 389-401. |
| [14] | 吴鹏飞, 石章松, 吴中红, 王智. 无人直升机自主着舰轨迹跟踪控制[J]. 系统工程与电子技术, 2019, 41(11): 2573-2580. |
| [15] | 王涛, 张洪波, 汤国建. 采用ESO补偿的再入飞行器姿态预测控制方法[J]. 系统工程与电子技术, 2018, 40(7): 1554-1559. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||