
系统工程与电子技术 ›› 2022, Vol. 44 ›› Issue (9): 2903-2913.doi: 10.12305/j.issn.1001-506X.2022.09.25
徐庚*, 何永旭, 张勇刚
收稿日期:2021-09-29
出版日期:2022-09-01
发布日期:2022-09-09
通讯作者:
徐庚
作者简介:徐庚(1993—), 男, 博士研究生, 主要研究方向为惯性导航、组合导航及数据融合|何永旭(1993—), 女, 博士研究生, 主要研究方向为水下无人潜航器导航与控制、机器学习|张勇刚(1981—), 男, 教授, 博士, 主要研究方向为导航传感器及算法、信号处理和信息融合
基金资助:Geng XU*, Yongxu HE, Yonggang ZHANG
Received:2021-09-29
Online:2022-09-01
Published:2022-09-09
Contact:
Geng XU
摘要:
针对传统的传递对准模型在大失准角下的强非线性问题以及由残余杆臂误差导致的传递对准精度下降问题, 提出了一种改进的惯性系传递对准算法。首先, 对子惯导姿态矩阵进行链式分解, 得到常值姿态矩阵; 然后, 利用罗德里格斯参数等价替代该常值姿态矩阵, 建立关于罗德里格斯参数和残余杆臂误差的具有弱非线性量测的传递对准模型; 最后, 利用非线性滤波对状态进行估计。基于摇摆运动的仿真实验表明, 在存在大安装误差角以及残余杆臂误差情况下, 算法相比于现有方法, 对准速度更快, 对准精度更高, 在5~10 s内即可完成传递对准。车载试验结果也间接说明算法具有更高的传递对准性能。
中图分类号:
徐庚, 何永旭, 张勇刚. 基于罗德里格斯参数的惯性系传递对准算法[J]. 系统工程与电子技术, 2022, 44(9): 2903-2913.
Geng XU, Yongxu HE, Yonggang ZHANG. Inertial-frame-based transfer alignment using Rodriguez parameters[J]. Systems Engineering and Electronics, 2022, 44(9): 2903-2913.
表1
符号说明"
| 符号 | 说明 |
| i | 惯性坐标系 |
| n | 导航坐标系(东-北-天) |
| e | 地球坐标系(地心地固坐标系) |
| m | 主惯导体坐标系(右-前-上) |
| s | 子惯导体坐标系(右-前-上) |
| φ, γ,Ψ | 纵摇角、横摇角、航向角 |
| Cxy | x系到y系的方向余弦矩阵 |
| ωxyz | y系相对x系的角速度在z系上的投影 |
| Ia, 0a×b | a×a单位阵, a×b零矩阵(向量) |
| diag(·) | 把向量转换为对角矩阵 |
| (·)-1 | 矩阵求逆运算 |
| (·)T | 矩阵(向量)转置运算 |
| (α×) | 向量α的反对称阵 |

图1
惯性系传递对准算法流程图"
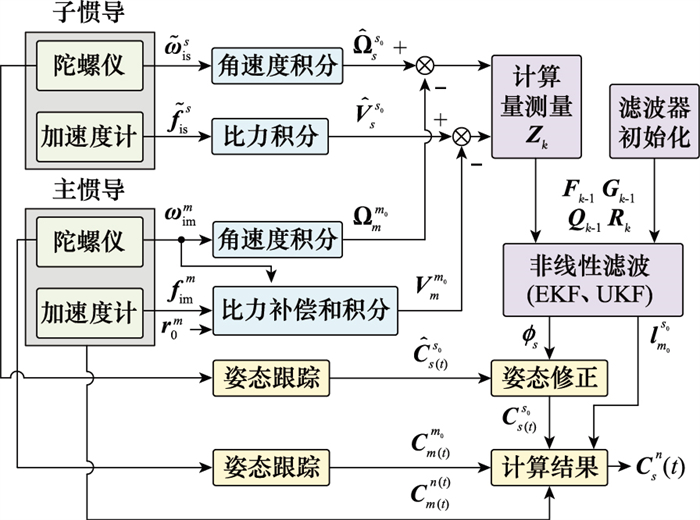
表2
摇摆运动参数"
| 参数 | 设定值 |
| 摇摆幅值/(°) | φm=5, γm=4, Ψm=3 |
| 摇摆周期/s | Tφ=7, Tγ=8, TΨ=9 |
| 初始角度/(°) | φI=0, γI=0, ΨI=45 |
| 离散时间/s | Ts=0.01 |
表3
子惯导传感器参数"
| 传感器 | 启动零偏 | 角度/速度随机游走 |
| 陀螺仪 | 100°/h | 1°/ |
| 加速度计 | 5 mg | 100 μg/ |
| 传感器 | 相关时间/s | 过程方差 |
| 陀螺仪 | 50 | (10°/h)2 |
| 加速度计 | 50 | (1 mg)2 |
图2
姿态误差角ϕs变化曲线"
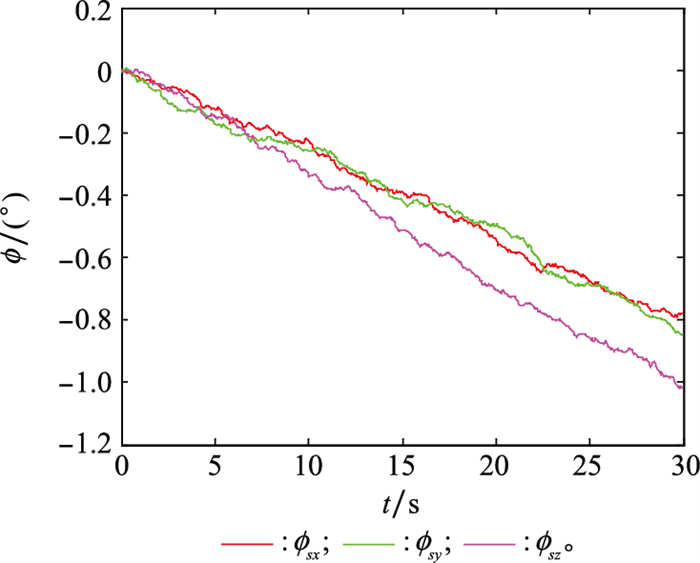

图3
安装误差角μxm估计结果"
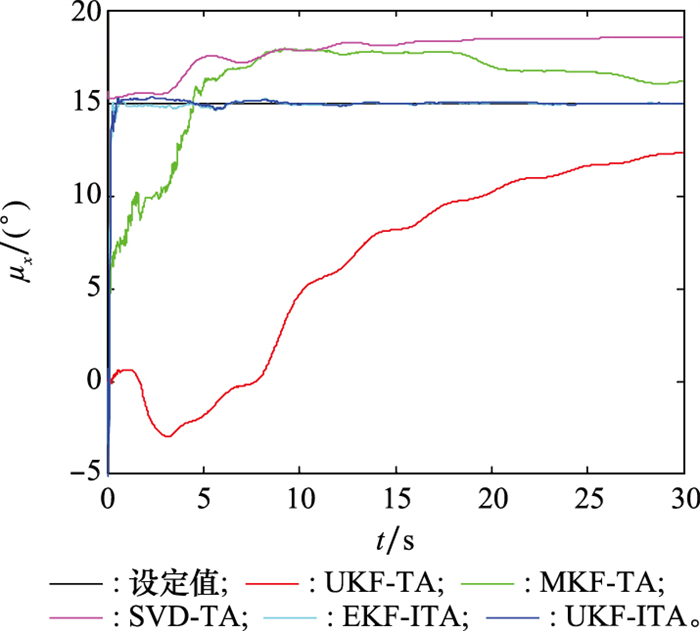
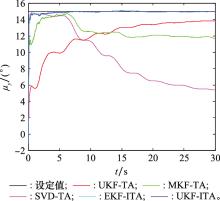
图4
安装误差角μym估计结果"
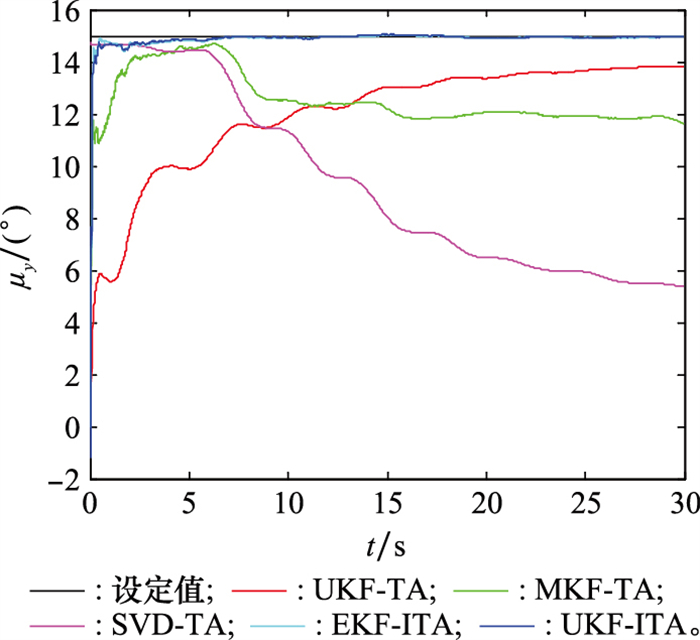
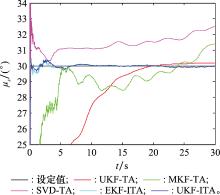
图5
安装误差角μzm估计结果"
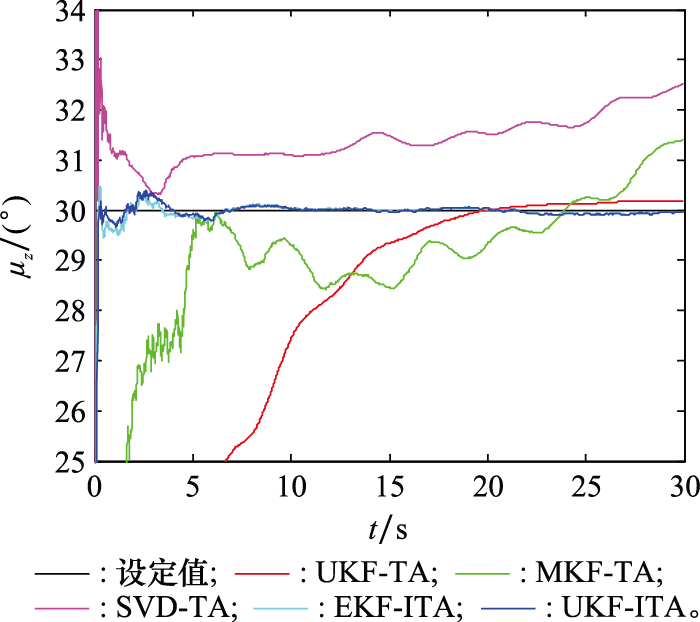
表4
安装误差角估计误差的均值和RMS (20~30 s)"
| 传递对准算法 | 统计方法 | μxm | μym | μzm |
| UKF-TA | 均值 | -3.507 0 | -1.340 9 | 0.127 8 |
| RMS | 3.554 7 | 1.347 7 | 0.137 3 | |
| SVD-TA | 均值 | 3.531 8 | -9.124 3 | 1.933 7 |
| RMS | 3.532 0 | 9.130 8 | 1.957 8 | |
| MKF-TA | 均值 | 1.566 6 | -3.078 3 | 0.241 0 |
| RMS | 1.590 2 | 3.079 9 | 0.675 8 | |
| EKF-ITA | 均值 | 0.005 1 | -0.052 1 | -0.055 9 |
| RMS | 0.031 1 | 0.056 5 | 0.062 9 | |
| UKF-ITA | 均值 | 0.013 6 | -0.050 9 | -0.057 5 |
| RMS | 0.034 1 | 0.054 3 | 0.064 7 |

图6
残余杆臂误差δrm估计结果"
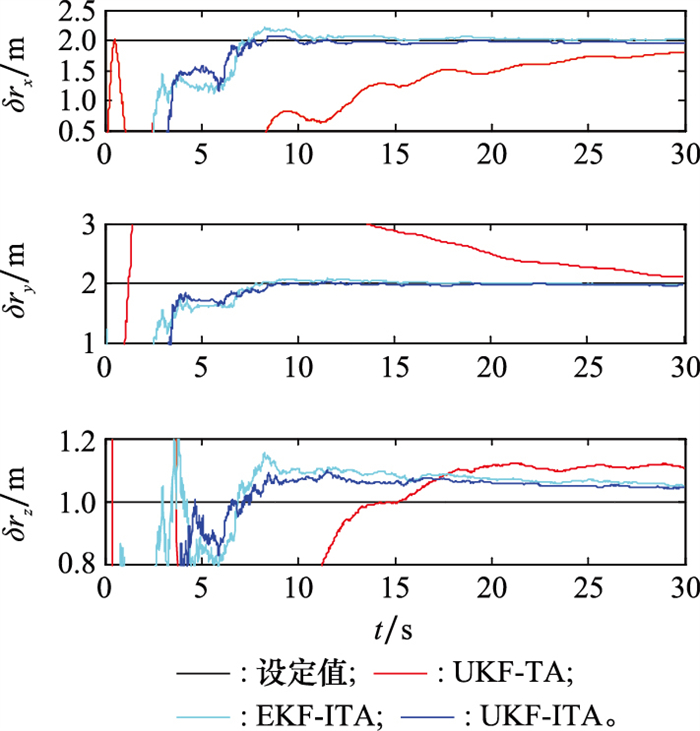

图7
陀螺仪零偏(启动零偏和零偏不稳定性)估计结果"
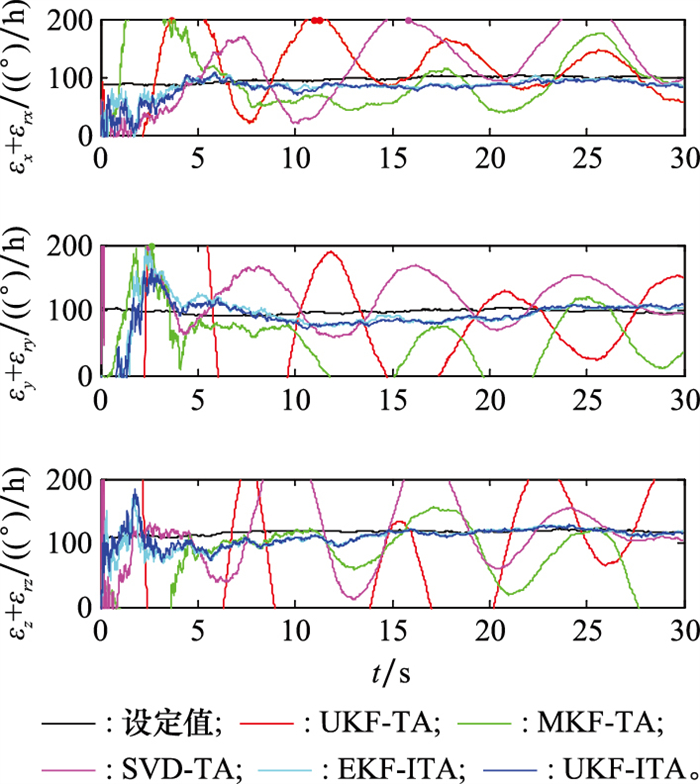
图8
加速度计零偏(启动零偏和零偏不稳定性)估计结果"
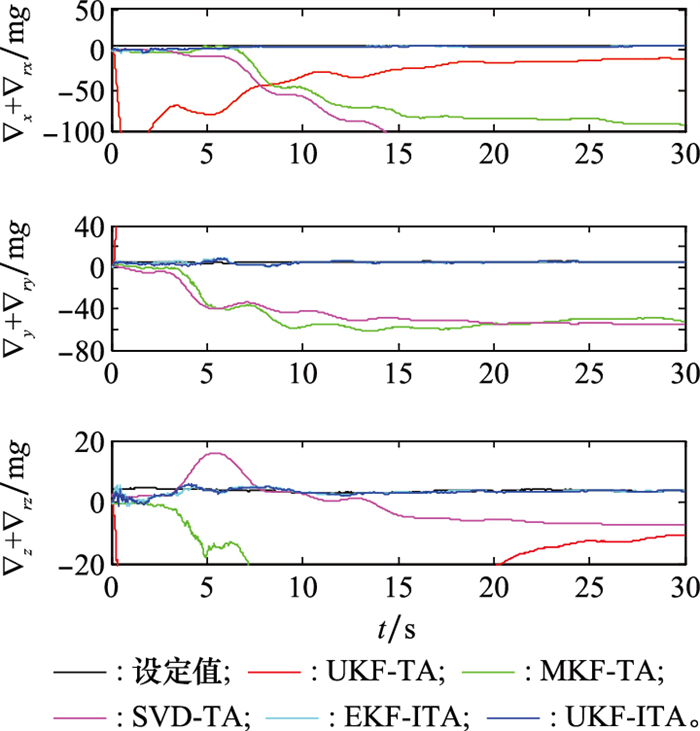

图9
车载平台与设备安装示意图"
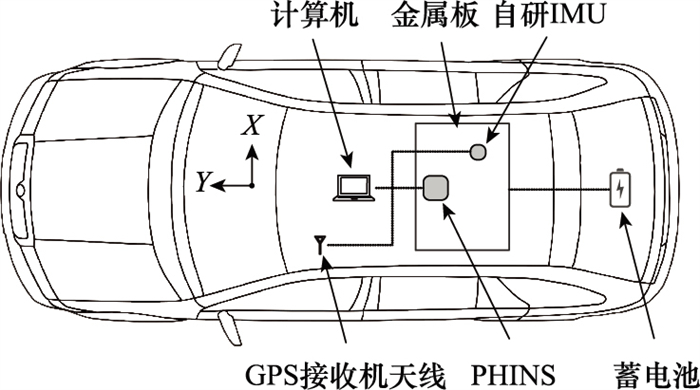
表5
IMU传感器参数"
| 传感器 | 零偏稳定性 | 角度/速度随机游走 |
| 陀螺仪 | 1°/h | 0.1°/ |
| 加速度计 | 1 mg | 100 μg/ |

图10
试验流程图"
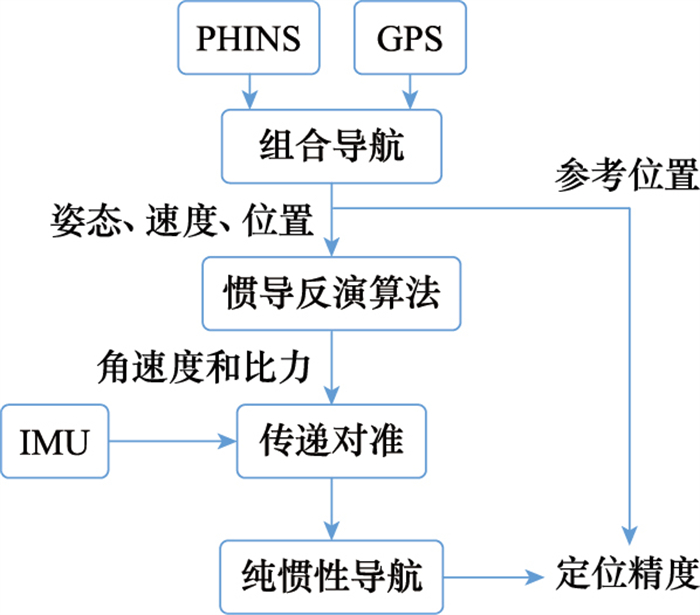
图11
车辆行驶轨迹和姿态变化"
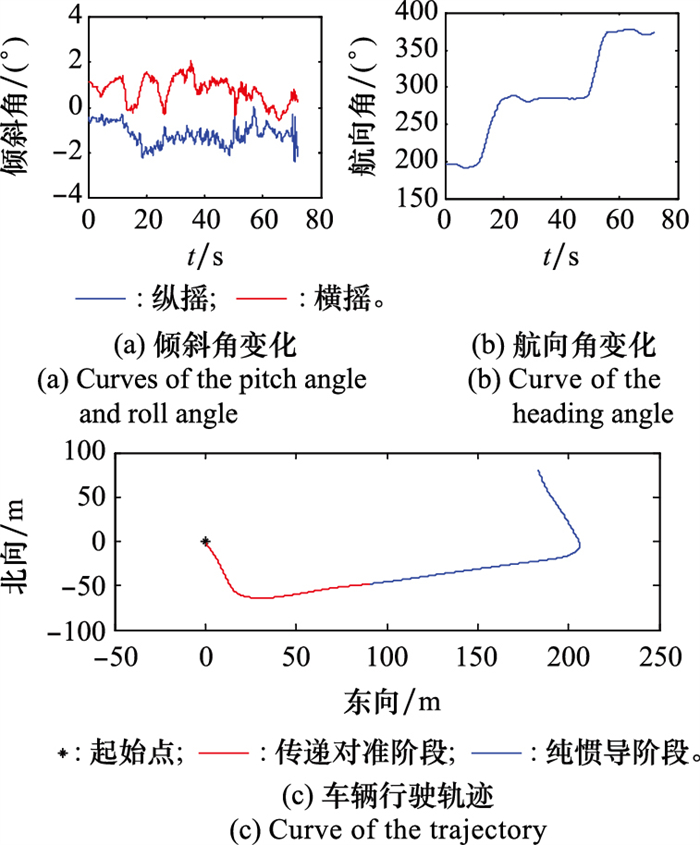
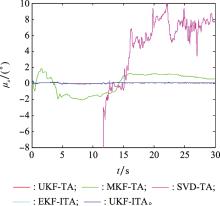
图12
安装误差角μxm估计结果(试验)"
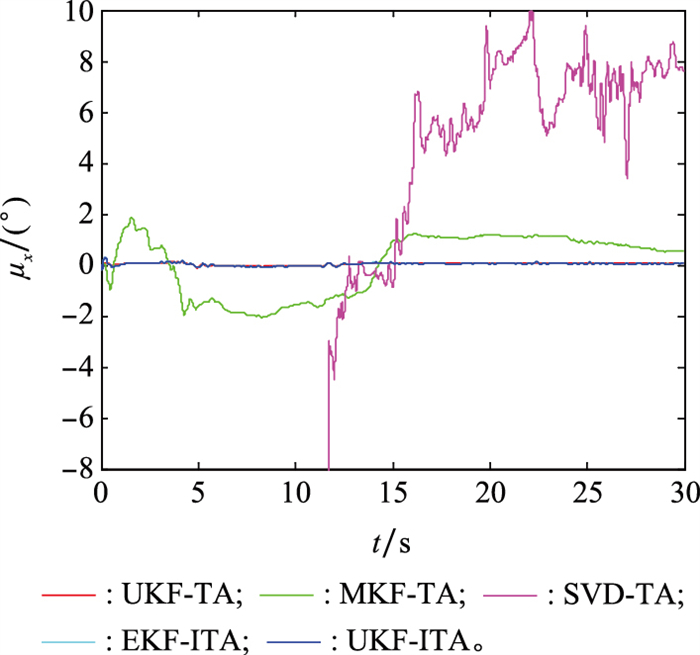
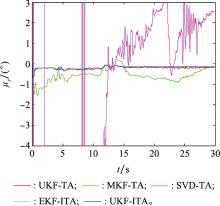
图13
安装误差角μym估计结果(试验)"
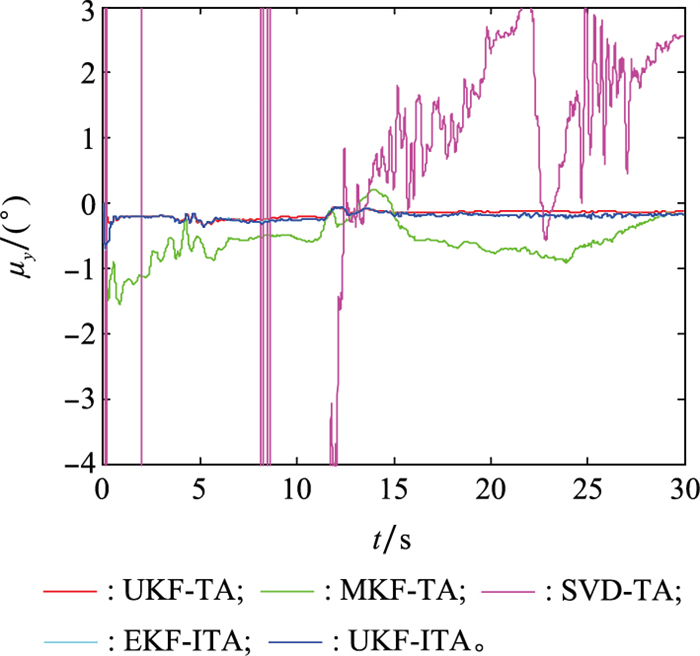
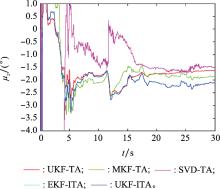
图14
安装误差角μzm估计结果(试验)"
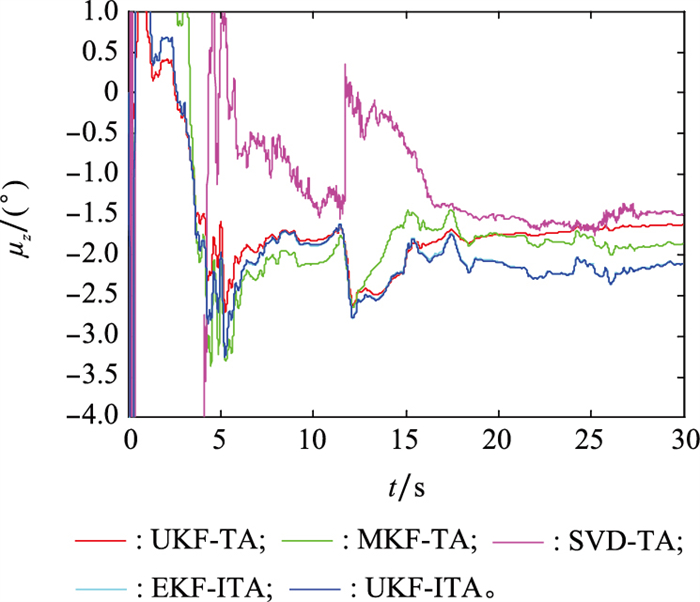
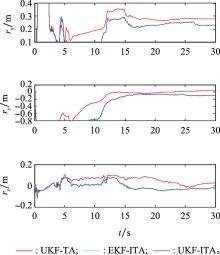
图15
杆臂误差rm估计结果"
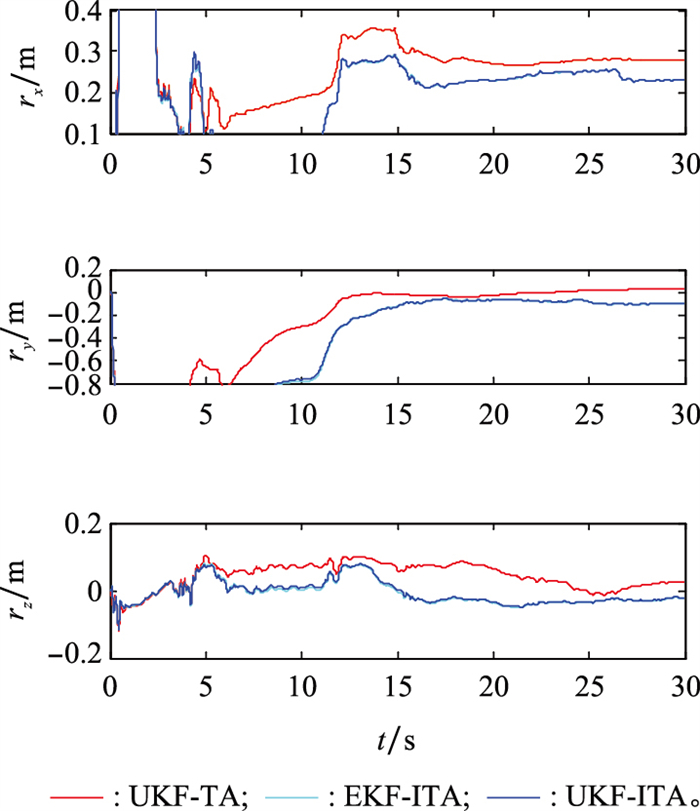

图16
陀螺仪零偏(启动零偏)估计结果"
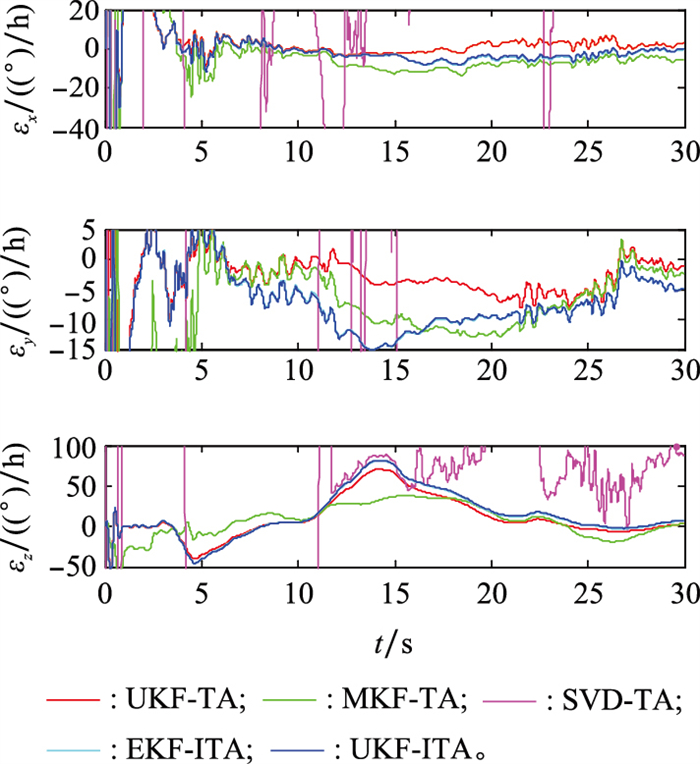

图17
加速度计零偏(启动零偏)估计结果"


图18
纯惯性导航的定位误差"
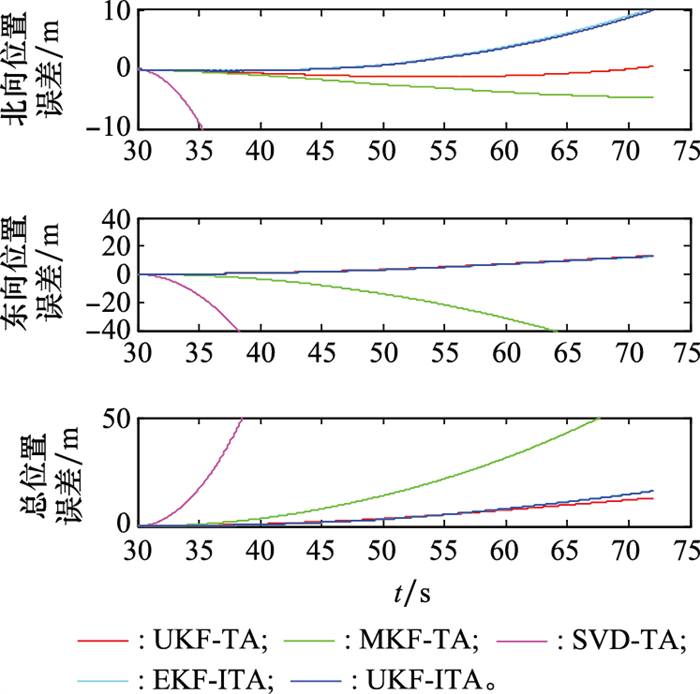
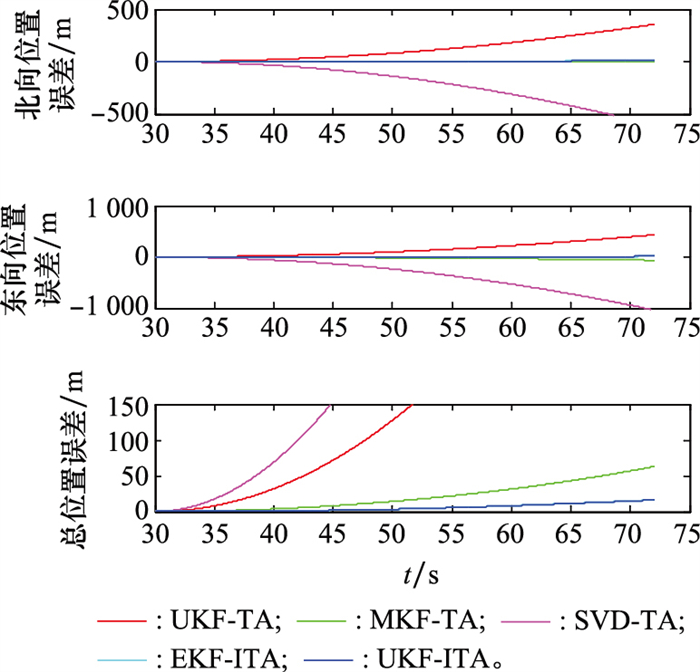
图19
纯惯性导航的定位误差(大失准角)"
| 1 |
WU Y Y , WU M P , HU X P , et al. Optimization-based alignment for inertial navigation systems: theory and algorithm[J]. Aerospace Science and Technology, 2011, 15 (1): 1- 17.
doi: 10.1016/j.ast.2010.05.004 |
| 2 |
KANG T Z , FANG J C , WANG W . Quaternion-optimization-based in-flight alignment approach for airborne POS[J]. IEEE Trans.on Instrumentation and Measurement, 2012, 61 (11): 2916- 2923.
doi: 10.1109/TIM.2012.2202989 |
| 3 | GROVES P D. Transfer alignment using an integrated INS/GPS as the reference[C]//Proc. of the 55th Annual Meeting of the Institute of Navigation, 1999: 731-737. |
| 4 | GROVES P D, HADDOCK J. An all-purpose rapid transfer alignment algorithm set[C]//Proc. of the National Technical Meeting of the Institute of Navigation, 2001: 160-171. |
| 5 | GROVES P D, WILSON G G, MATHER C J. Robust rapid transfer alignment with an INS/GPS reference[C]//Proc. of the National Technical Meeting of The Institute of Navigation, 2002: 301-311. |
| 6 | GRAHAM W R, RABOURN C, SHORTELLE K J. Rapid alignment prototype (RAP) flight test demonstration[C]//Proc. of the National Technical Meeting of the Institute of Naviga-tion, 1998. |
| 7 | GRAHAM W R, SHORTELLE K J, RABOURN C. F-16 flight tests of a rapid transfer alignment procedure[C]//Proc. of the IEEE Position Location and Navigation Symposium, 1996. |
| 8 |
WANG T D , CHENG J H , GUAN D X . Modified compensation algorithm of lever-arm effect and flexural deformation for polar shipborne transfer alignment based on improved adaptive Kalman filter[J]. Measurement Science and Technology, 2017, 28 (9): 095101.
doi: 10.1088/1361-6501/aa781a |
| 9 |
HUANG Y L , ZHANG Z , DU S Y , et al. A high-accuracy GPS-aided coarse alignment method for MEMS-based SINS[J]. IEEE Trans.on Instrumentation and Measurement, 2020, 69 (10): 7914- 7932.
doi: 10.1109/TIM.2020.2983578 |
| 10 |
GROVES P D . Optimising the transfer alignment of weapon INS[J]. Journal of Navigation, 2003, 56 (2): 323- 335.
doi: 10.1017/S0373463303002261 |
| 11 |
LU J Z , XIE L L , LI B G . Applied quaternion optimization method in transfer alignment for airborne AHRS under large misalignment angle[J]. IEEE Trans.on Instrumentation and Measurement, 2016, 65 (2): 346- 354.
doi: 10.1109/TIM.2015.2502838 |
| 12 | LU J Z , YE L L , DONG J . Applied singular value decomposition method in transfer alignment and bias calibration[J]. IET Radar, Sonar & Navigation, 2020, 14 (5): 700- 706. |
| 13 |
崔潇, 秦永元, 严恭敏, 等. 任意失准角无奇异快速传递对准[J]. 宇航学报, 2018, 39 (10): 1127- 1133.
doi: 10.3873/j.issn.1000-1328.2018.10.008 |
|
CUI X , QIN Y Y , YAN G M , et al. Nonsingular rapid transfer alignment for SINS at random misalignment angles[J]. Journal of Astronautics, 2018, 39 (10): 1127- 1133.
doi: 10.3873/j.issn.1000-1328.2018.10.008 |
|
| 14 | BAZIW J , LEONDES C T . In-flight alignment and calibration of inertial measurement units, Part Ⅰ: general formulation[J]. IEEE Trans.on Aerospace and Electronic Systems, 1972, 8 (4): 439- 449. |
| 15 | BAZIW J , LEONDES C T . In-flight alignment and calibration of inertial measurement units, Part Ⅱ: experimental results[J]. IEEE Trans.on Aerospace and Electronic Systems, 1972, 8 (4): 450- 465. |
| 16 | KAIN J, CLOUTIER J. Rapid transfer alignment for tactical weapon applications[C]//Proc. of the AIAA Guidance, Navigation and Control Conference, 1989: 3581. |
| 17 |
XU G , HUANG Y L , GAO Z X , et al. A computationally efficient variational adaptive Kalman filter for transfer alignment[J]. IEEE Sensors Journal, 2020, 20 (22): 13682- 13693.
doi: 10.1109/JSEN.2020.3004621 |
| 18 |
GONG X L , FAN W , FANG J C . An innovational transfer alignment method based on parameter identification UKF for airborne distributed POS[J]. Measurement, 2014, 58, 103- 114.
doi: 10.1016/j.measurement.2014.08.034 |
| 19 |
ZOU S Y , LI J L , LU Z X . A nonlinear transfer alignment of distributed POS based on adaptive second-order divided difference filter[J]. IEEE Sensors Journal, 2018, 18 (23): 9612- 9618.
doi: 10.1109/JSEN.2018.2869979 |
| 20 |
CHENG J H , WANG T D , GUAN D X , et al. Polar transfer alignment of shipborne SINS with a large misalignment angle[J]. Measurement Science and Technology, 2016, 27 (3): 035101.
doi: 10.1088/0957-0233/27/3/035101 |
| 21 |
严恭敏, 秦永元, 卫育新, 等. 一种适用于SINS动基座初始对准的新算法[J]. 系统工程与电子技术, 2009, 31 (3): 634- 637.
doi: 10.3321/j.issn:1001-506X.2009.03.036 |
|
YAN G M , QIN Y Y , WEI Y X , et al. New initial alignment algorithm for SINS on moving base[J]. Systems Engineering and Electronics, 2009, 31 (3): 634- 637.
doi: 10.3321/j.issn:1001-506X.2009.03.036 |
|
| 22 | 梅春波. 捷联惯性导航系统惯性系非线性初始对准技术研究[D]. 西安: 西北工业大学, 2016. |
| MEI C B. Nonlinear initial alignment in inertial frame for SINS[D]. Xi'an: Northwestern Polytechnical University, 2016. | |
| 23 |
CUI X , MEI C B , QIN Y Y , et al. A unified model for transfer alignment at random misalignment angles based on second-order EKF[J]. Measurement Science and Technology, 2017, 28 (4): 045106.
doi: 10.1088/1361-6501/aa5b75 |
| 24 | MOCHALOV A V, PRIVALOV V E, KAZANTASEV A V. Use of the ring laser units for measurement of the moving object deformation[C]//Proc. of the 2nd International Conference on Lasers for Measurement and Information Transfer, 2002. |
| 25 | 吕遐东, 刘佳铭, 姚腾钢. 船舶动态变形特性分析与测量方法研究[J]. 华中科技大学学报: 自然科学版, 2013, 41 (S1): 215- 218. |
| LYU X D , LIU J M , YAO T G . Research on ship dynamic deformation characteristic analysis and measurement method[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2013, 41 (S1): 215- 218. | |
| 26 | 李四海, 王珏, 刘镇波, 等. 快速传递对准中机翼弹性变形估计方法比较[J]. 中国惯性技术学报, 2014, 22 (1): 38- 44. |
| LI S H , WANG J , LIU Z B , et al. Comparison of wing distortion estimation methods in transfer alignment[J]. Journal of Chinese Inertial Technology, 2014, 22 (1): 38- 44. | |
| 27 |
WANG B , DENG Z H , LIU C , et al. Estimation of information sharing error by dynamic deformation between inertial navi-gation systems[J]. IEEE Trans.on Industrial Electronics, 2014, 61 (4): 2015- 2023.
doi: 10.1109/TIE.2013.2271595 |
| 28 | 严恭敏, 李四海, 秦永元. 惯性仪器测试与数据分析[M]. 北京: 国防工业出版社, 2015: 136- 147. |
| YAN G M , LI S H , QIN Y Y . Inertial instrument testing and data analysis[M]. Beijing: National Defense Industry Press, 2015: 136- 147. | |
| 29 |
DAMBECK J , BLUM C . Analytical assessment of the propagation of colored sensor noise in strapdown inertial navigation[J]. Sensors, 2020, 20 (23): 6914.
doi: 10.3390/s20236914 |
| 30 | FARRELL J A, SILVA F O, RAHMAN F, et al. IMU error modeling tutorial: INS state estimation with real-time sensor calibration[EB/OL]. [2021-11-06]. https://escholarship.org/uc/item/1vf7j52p. |
| 31 |
CUI X , YAN G M , FU Q W . A unified nonsingular rapid transfer alignment solution for tactical weapon based on matrix Kalman filter[J]. IEEE Access, 2018, 6, 78700- 78709.
doi: 10.1109/ACCESS.2018.2885144 |
| 32 |
WU Y X , PAN X F . Velocity/position integration formula part Ⅰ: application to in-flight coarse alignment[J]. IEEE Trans.on Aerospace and Electronic Systems, 2013, 49 (2): 1006- 1023.
doi: 10.1109/TAES.2013.6494395 |
| 33 |
CHOUKROUN D , WEISS H , BAR-ITZHACK I Y , et al. Kalman filtering for matrix estimation[J]. IEEE Trans.on Aerospace and Electronic Systems, 2006, 42 (1): 147- 159.
doi: 10.1109/TAES.2006.1603411 |
| 34 | 严恭敏, WANGJinling, 周馨怡. 基于实测轨迹的高精度捷联惯导模拟器[J]. 导航定位学报, 2015, 3 (4): 27- 31. |
| YAN G M , WANG J L , ZHOU X Y . High-precision simulator for strapdown inertial navigation systems based on real dynamics[J]. Journal of Navigation and Positioning, 2015, 3 (4): 27- 31. |
| [1] | 郝诗文, 张志利, 周召发, 常振军, 刘先一. 重力扰动对惯性导航系统初始对准的影响[J]. 系统工程与电子技术, 2020, 42(7): 1575-1581. |
| [2] | 史荣宗, 马晨, 郭正玉. 速度匹配算法在传递对准中的应用分析[J]. 系统工程与电子技术, 2020, 42(10): 2328-2333. |
| [3] | 杜俊伟, 陈起金, 牛小骥, 刘经南. MEMS惯性高度尺测量精度分析[J]. 系统工程与电子技术, 2019, 41(11): 2605-2610. |
| [4] | 程建华, 范世龙, 李亮, 董萍. 基于量测修正的组合导航系统时间同步方法[J]. 系统工程与电子技术, 2019, 41(10): 2328-2333. |
| [5] | 吴华丽, 肖支才, 周大旺, 王玲玲. 基于矩阵分解的惯导安装误差矩阵解耦方法[J]. 系统工程与电子技术, 2018, 40(5): 1091-1097. |
| [6] | 江秀红, 段富海, 胡爱玲. 基于维修重要度的多态系统预测性维修[J]. 系统工程与电子技术, 2018, 40(4): 839-844. |
| [7] | 奔粤阳, 孙炎, 王翔宇, 陈海南, 杨立胜, 刘政浩. 卫导辅助下的舰船捷联惯导航行间粗对准方法[J]. 系统工程与电子技术, 2018, 40(12): 2797-2803. |
| [8] | 高军强, 汤霞清, 张环, 武萌. 基于因子图的车载INS/GNSS/OD组合导航算法[J]. 系统工程与电子技术, 2018, 40(11): 2547-. |
| [9] | 郭士荦, 许江宁, 吴苗. 基于平滑算法的惯导系统误差校正技术[J]. 系统工程与电子技术, 2017, 39(7): 1570-1575. |
| [10] | 薛海建, 郭晓松, 周召发. 基于自适应多重渐消因子卡尔曼滤波的[J]. 系统工程与电子技术, 2017, 39(3): 620-626. |
| [11] | 王玮, 郭慧杰, 孟跃. 卫星/伪卫星/惯性组合着舰导引算法[J]. 系统工程与电子技术, 2017, 39(2): 391-397. |
| [12] | 程建华, 王通达, 宋春雨, 于东伟. #br# 舰船捷联惯导传递对准的改进自适应滤波算法[J]. 系统工程与电子技术, 2016, 38(3): 638-643. |
| [13] | 刘帅, 孙付平, 张伦东. 模糊度固定解PPP/INS紧组合模型[J]. 系统工程与电子技术, 2016, 38(10): 2389-2394. |
| [14] | 赵琳, 李久顺, 程建华, 贾春, 王秋帆. 基于延时对准船用捷联惯导舒勒振荡抑制方法[J]. 系统工程与电子技术, 2016, 38(10): 2375-2380. |
| [15] | 高伟1, 单为1, 徐博1, 程正生2. 惯性系下平台惯导传递对准方法[J]. 系统工程与电子技术, 2015, 37(5): 1151-1156. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||