
系统工程与电子技术 ›› 2022, Vol. 44 ›› Issue (7): 2302-2310.doi: 10.12305/j.issn.1001-506X.2022.07.27
史浩然*, 卢发兴, 祁江鑫, 杨光
收稿日期:2021-06-01
出版日期:2022-06-22
发布日期:2022-06-28
通讯作者:
史浩然
作者简介:史浩然(1992—), 男, 博士研究生, 主要研究方向为多无人机协同控制、目标跟踪|卢发兴(1974—), 男, 教授, 博士, 主要研究方向为舰艇指挥与控制|祁江鑫(1995—), 男, 硕士研究生, 主要研究方向为无人机群目标检测|杨光(1990—), 男, 博士研究生, 主要研究方向为导弹协同制导
Haoran SHI*, Faxing LU, Jiangxin QI, Guang YANG
Received:2021-06-01
Online:2022-06-22
Published:2022-06-28
Contact:
Haoran SHI
摘要:
针对无人机姿态角误差与观测误差影响目标定位精度问题, 构建基于辅助信标的无人机协同目标跟踪模型, 提高了对目标的定位精度。提出基于辅助信标的姿态校正方法, 利用辅助信标的精确位置实时校正无人机的姿态角, 减小姿态角误差对定位精度的影响。根据双无人机的最优观测构型, 设计双无人机协同控制律, 得到无人机观测的优化轨迹, 以提高无人机对目标的观测质量, 最后采用容积卡尔曼滤波算法得到目标的状态估计。仿真结果表明该算法能有效减小无人机姿态角误差和观测误差对目标定位的影响, 提高目标跟踪精度, 具有一定的工程应用价值。
中图分类号:
史浩然, 卢发兴, 祁江鑫, 杨光. 基于辅助信标的无人机协同目标跟踪[J]. 系统工程与电子技术, 2022, 44(7): 2302-2310.
Haoran SHI, Faxing LU, Jiangxin QI, Guang YANG. Cooperative target tracking of UAVs based on aided beacon[J]. Systems Engineering and Electronics, 2022, 44(7): 2302-2310.
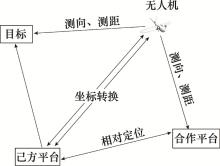
图1
基于辅助信标的无人机姿态校正概念图"
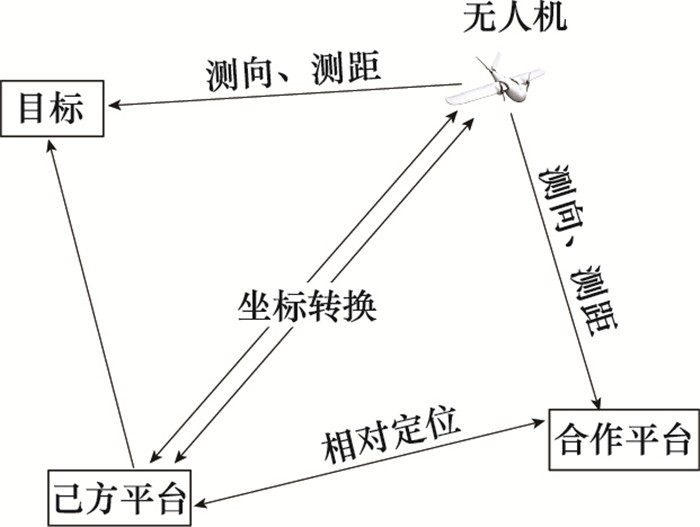
图2
双机协同跟踪算法结构图"
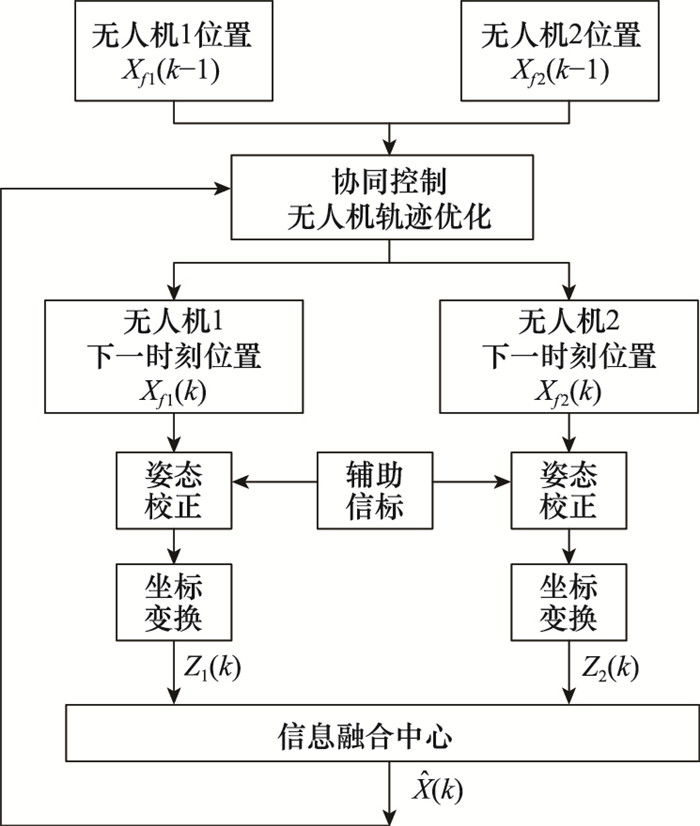
图3
单机观测时目标位置RMSE"
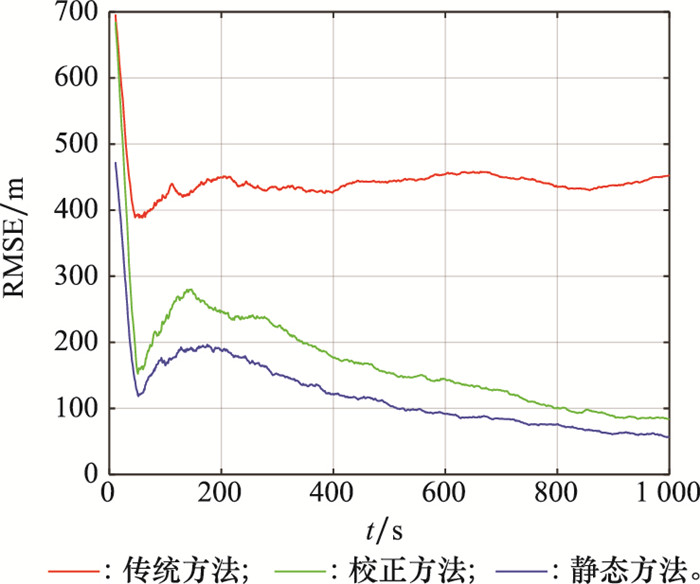
图4
不同滤波算法下目标位置RMSE"
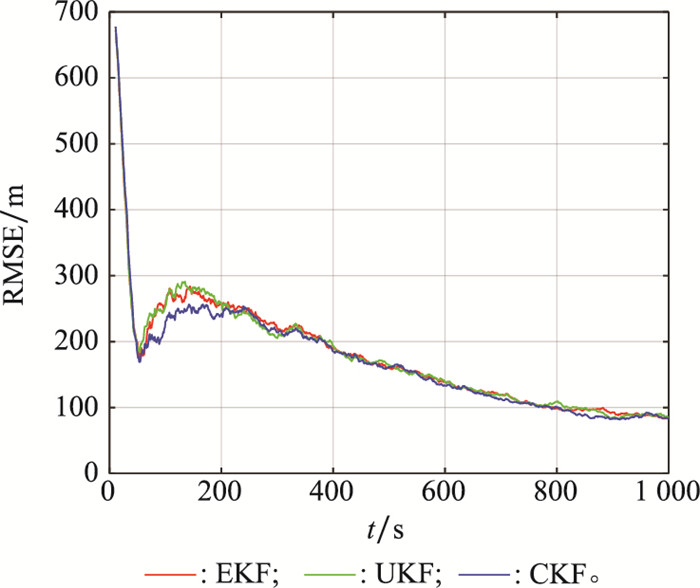
图5
双无人机对目标定位空间态势图"
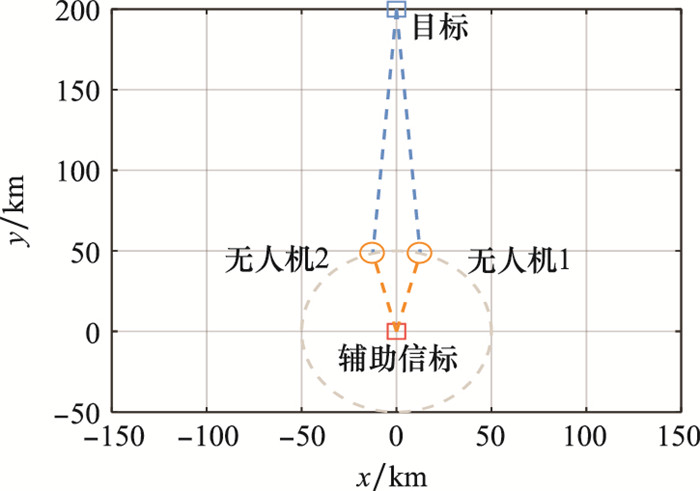
图6
双机观测时目标位置RMSE"
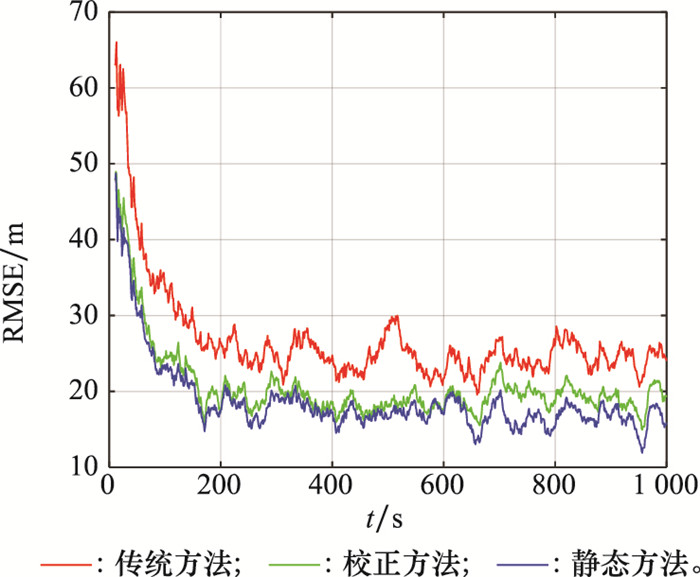
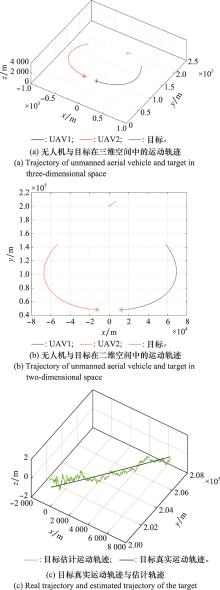
图7
无人机与目标的运动轨迹"
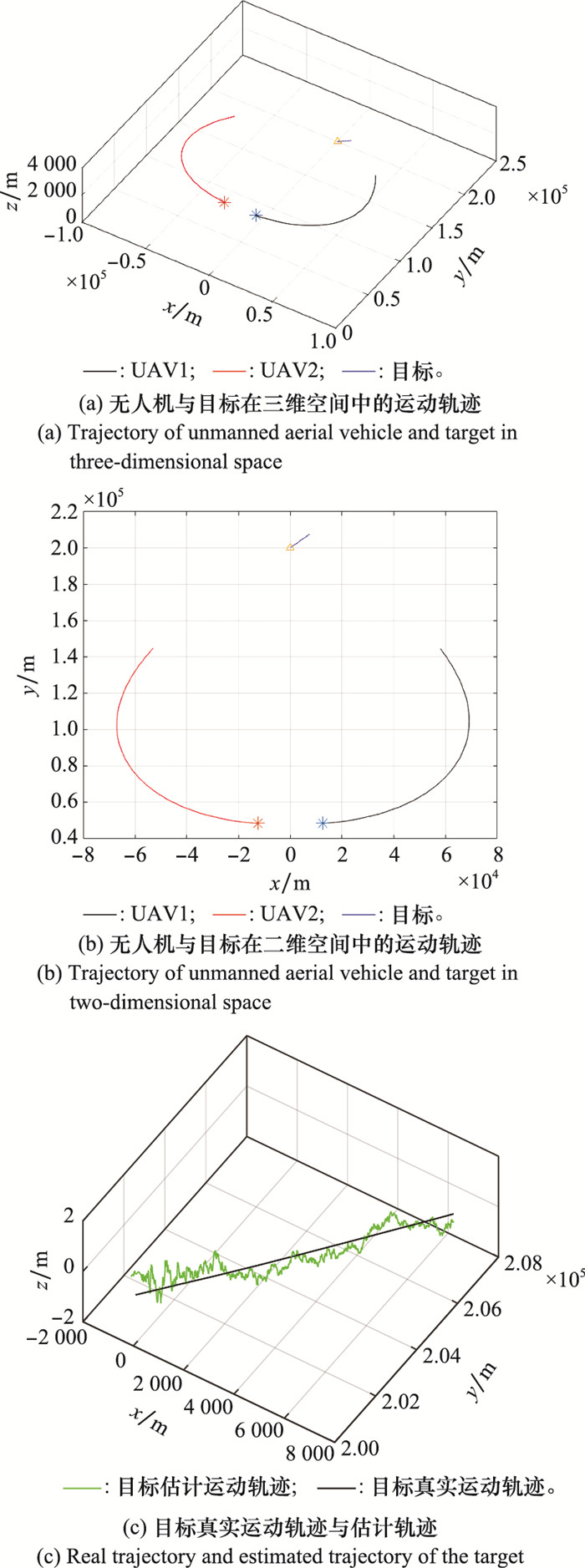

图8
无人机与目标之间距离和视线夹角变化曲线"
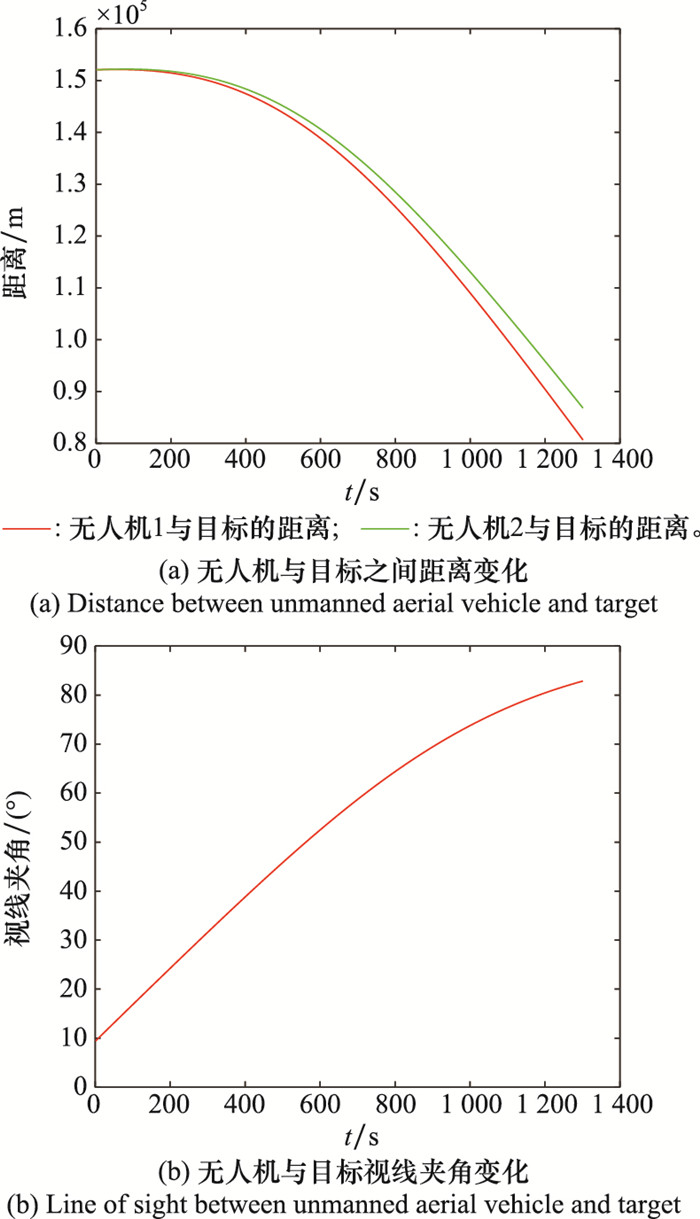
图9
双机协同观测时目标位置RMSE"
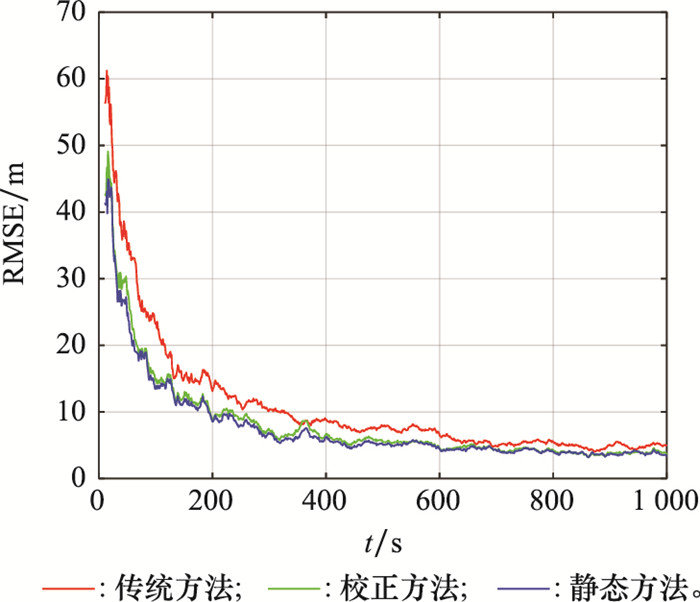
图10
Lyapunov导航矢量场规划的无人机轨迹"
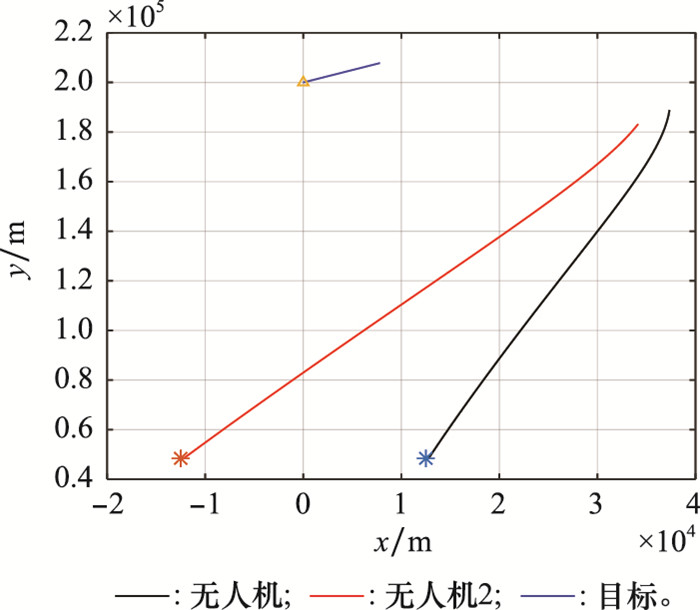
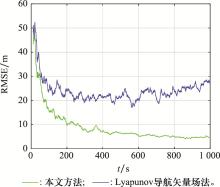
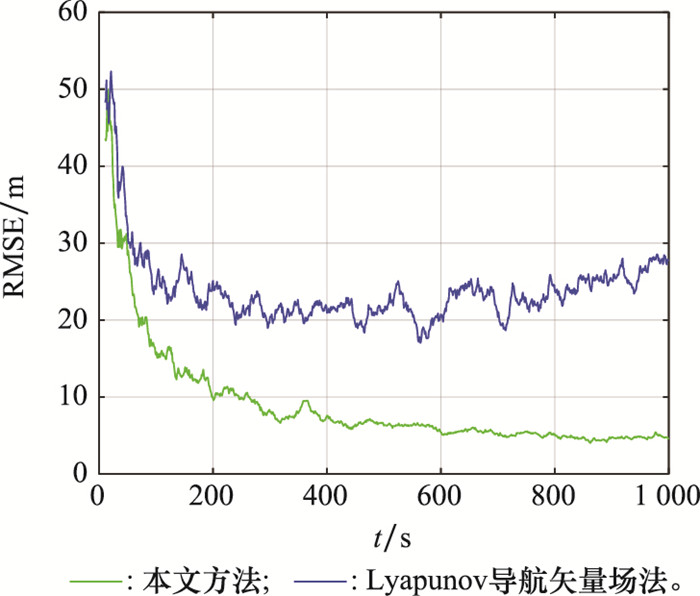
图11
本文方法与Lyapunov导航矢量场法RMSE"
| 1 | 邵慧. 无人机高精度目标定位技术研究[D]. 南京: 南京航空航天大学, 2014. |
| SHAO H. Research on high precision target localization techno-logy in UAV[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2014. | |
| 2 |
LI J , WEI X G , ZHANG G J . An extended Kalman filter-based attitude tracking algorithm for star sensors[J]. Sensors, 2017, 17 (8): 1921.
doi: 10.3390/s17081921 |
| 3 | GARCIA R V , KUGA H K , ZANARDI M C . Unscented Kalman filter for spacecraft attitude estimation using modified Rodrigues parameters and real data[J]. Computational & Applied Mathematics, 2016, 35 (3): 835- 846. |
| 4 | 蔡安江, 刘凯峰, 郭师虹, 等. 基于四元数衍生无迹卡尔曼滤波的二段式多旋翼无人机姿态估计算法[J]. 控制理论与应用, 2020, 37 (2): 365- 373. |
| CAI A J , LIU K F , GUO S H , et al. Quaternion derivative unscented Kalman filter-based two-step attitude estimation algorithm for multi-rotor unmanned aerial vehicle[J]. Control Theory & Applications, 2020, 37 (2): 365- 373. | |
| 5 | HE S M , SHIN H S , TSOURDOS A . Trajectory optimization for multitarget tracking using joint probabilistic data association filter[J]. Journal of Guidance, Control, and Dynamics, 2019, 43 (1): 170- 178. |
| 6 |
ZHANG S , GUO Y , LU Z , et al. Cooperative detection based on the adaptive interacting multiple model-information filtering algorithm[J]. Aerospace Science and Technology, 2019, 93, 105310.
doi: 10.1016/j.ast.2019.105310 |
| 7 | ULUSKAN S . Noncausal trajectory optimization for real-time range-only target localization by multiple UAVs[J]. Aerospace Science and Technology, 2020, 99 (3): 105558. |
| 8 |
BISHOP A N , FIDAN B , ANDERSON B , et al. Optimality analysis of sensor-target localization geometries[J]. Automatica, 2010, 46 (3): 479- 492.
doi: 10.1016/j.automatica.2009.12.003 |
| 9 |
SONIA M , FRANCESCO B . Optimal sensor placement and motion coordination for target tracking[J]. Automatica, 2006, 42 (4): 661- 668.
doi: 10.1016/j.automatica.2005.12.018 |
| 10 | 王林. 多无人机协同目标跟踪问题建模与优化技术研究[D]. 长沙: 国防科学技术大学, 2011. |
| WANG L. Modeling and optimization for multi-UAVs coope-rative target tracking[D]. Changsha: National University of Defense Technology, 2011. | |
| 11 |
ZHAO S Y , CHEN B M , LEE T H . Optimal sensor placement for target localization and tracking in 2D and 3D[J]. International Journal of Control, 2013, 86 (10): 1687- 1704.
doi: 10.1080/00207179.2013.792606 |
| 12 | 孙海波, 周锐, 邹丽, 等. 通信和测量受限条件下异构多UAV分布式协同目标跟踪方法[J]. 航空学报, 2011, 32 (2): 299- 310. |
| SUN H B , ZHOU R , ZOU L , et al. Distributed cooperation target tracking for heterogeneous multi-UAV under communication and measurement constrains[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32 (2): 299- 310. | |
| 13 |
DI B , ZHOU R , DUAN H B . Potential field based receding horizon motion planning for centrality-aware multiple UAV cooperative surveillance[J]. Aerospace Science and Technology, 2015, 46, 386- 397.
doi: 10.1016/j.ast.2015.08.006 |
| 14 |
YAO P , WANG H L , JI H X . Multi-UAVs tracking target in urban environment by model predictive control and improved grey wolf optimizer[J]. Aerospace Science and Technology, 2016, 55, 131- 143.
doi: 10.1016/j.ast.2016.05.016 |
| 15 |
KIM S , OH H , TSOURDOS A . Nonlinear model predictive coordinated standoff tracking of a moving ground vehicle[J]. Journal of Guidance, Control, and Dynamics, 2013, 36 (2): 557- 566.
doi: 10.2514/1.56254 |
| 16 |
SONG Z X , LI H X , CHEN C L , et al. Coordinated standoff tracking of moving targets using differential geometry[J]. Journal of Zhejiang University-Science C, 2014, 15 (4): 284- 292.
doi: 10.1631/jzus.C1300287 |
| 17 |
KOKOLAKIS N , KOUSSOULAS N T . Robust standoff target tracking with finite-time phase separation under unknown wind[J]. Journal of Guidance, Control, and Dynamics, 2021, 44 (6): 1183- 1198.
doi: 10.2514/1.G005517 |
| 18 |
OUSINGSAWAT J , CAMPBELL M E . Optimal cooperative reconnaissance using multiple vehicles[J]. Journal of Gui-dance, Control, and Dynamics, 2007, 30 (1): 122- 132.
doi: 10.2514/1.19147 |
| 19 |
孙顺, 熊伟, 刘瑜, 等. 基于TDOA的多机协同闭环最优控制方法[J]. 电光与控制, 2019, 26 (3): 1- 7.
doi: 10.3969/j.issn.1671-637X.2019.03.001 |
|
SUN S , XIONG W , LIU Y , et al. A TDOA based closed-loop optimal control method for multiple UAVs[J]. Electronics Optics & Control, 2019, 26 (3): 1- 7.
doi: 10.3969/j.issn.1671-637X.2019.03.001 |
|
| 20 | 朱惠民, 贾正荣, 王航宇, 等. 针对不同视场辅助信标的无人机目标定位方法[J]. 国防科技大学学报, 2019, 41 (3): 125- 136. |
| ZHU H M , JIA Z R , WANG H Y , et al. Target location method of unmanned aerial vehicle direct at aided beacon in different field of view[J]. Journal of National University of Defense Technology, 2019, 41 (3): 125- 136. | |
| 21 | 刘重, 高晓光, 符小卫. 基于通信与观测联合优化的多无人机协同目标跟踪控制[J]. 控制与决策, 2018, 33 (10): 1747- 1756. |
| LIU C , GAO X G , FU X W . Co-optimization of communication and observation for multiple UAVs in cooperative target tracking[J]. Control and Decision, 2018, 33 (10): 1747- 1756. | |
| 22 |
HUNG N T , CRASTA N , MORENO S D , et al. Range-based target localization and pursuit with autonomous vehicles: an approach using posterior CRLB and model predictive control[J]. Robotics and Autonomous Systems, 2020, 132, 103608.
doi: 10.1016/j.robot.2020.103608 |
| 23 |
XU S . Optimal sensor placement for target localization using hybrid RSS, AOA and TOA measurements[J]. IEEE Communications Letters, 2020, 24 (9): 1966- 1970.
doi: 10.1109/LCOMM.2020.2996259 |
| 24 |
SHI H R , LU F X , WANG H Y , et al. Optimal observation configuration of UAVs based on angle and range measurements and cooperative target tracking in three-dimensional space[J]. Journal of Systems Engineering and Electronics, 2020, 31 (5): 996- 1008.
doi: 10.23919/JSEE.2020.000074 |
| 25 |
钟春梅, 赵振宇, 孙海波, 等. 多无人机协同目标跟踪闭环最优控制方法[J]. 探测与控制学报, 2012, 34 (3): 13- 18.
doi: 10.3969/j.issn.1008-1194.2012.03.003 |
|
ZHONG C M , ZHAO Z Y , SUN H B , et al. A closed-loop optimal control for multiple unmanned aerial vehicles cooperative target tracking[J]. Journal of Detection & Control, 2012, 34 (3): 13- 18.
doi: 10.3969/j.issn.1008-1194.2012.03.003 |
|
| 26 |
IENKARAN A , SIMON H . Cubature Kalman filters[J]. IEEE Trans.on Automatic Control, 2009, 54 (6): 1254- 1269.
doi: 10.1109/TAC.2009.2019800 |
| 27 | 丁家琳, 肖建, 张勇. 基于CKF的分布式滤波算法及其在目标跟踪中的应用[J]. 控制与决策, 2015, 30 (2): 296- 302. |
| DING J L , XIAO J , ZHANG Y . Distributed algorithm-based CKF and its applications to target tracking[J]. Control and Decision, 2015, 30 (2): 296- 302. | |
| 28 | SANTOSL J , ORIVE R , ACOSTA D , et al. The cubature Kalman filter revisited[J]. Automatica, 2021, 127 (6): 109541. |
| 29 | WANG D , HUANG D , XU C , et al. A closed-form method for simultaneous target localization and UAV trajectory optimization[J]. Applied Sciences, 2021, 11 (1): 114. |
| 30 |
LAWRENCE D A , FREW E , PISANO W . Lyapunov vector fields for autonomous UAV flight control[J]. Journal of Gui-dance, Control, and Dynamics, 2008, 31 (5): 1220- 1229.
doi: 10.2514/1.34896 |
| 31 | YAO P , WANG H L , SU Z K . Cooperative path planning with applications to target tracking and obstacle avoidance for multi-UAVs[J]. Aerospace Science and Technology, 2016, 54 (6): 10- 22. |
| [1] | 仇祝令, 查宇飞, 李振宇, 李禹铭, 张鹏, 朱川. 基于多模型蒸馏的时间正则化相关滤波跟踪算法[J]. 系统工程与电子技术, 2022, 44(8): 2448-2456. |
| [2] | 侯子林, 程婷, 彭瀚. 基于量测转换序贯滤波的GMPHD机动目标跟踪[J]. 系统工程与电子技术, 2022, 44(8): 2474-2482. |
| [3] | 金国栋, 薛远亮, 谭力宁, 许剑锟. 基于孪生神经网络的目标跟踪算法进展研究[J]. 系统工程与电子技术, 2022, 44(6): 1805-1822. |
| [4] | 翟光, 王妍欣, 孙一勇. 基于低轨星网的多目标协同跟踪滤波技术[J]. 系统工程与电子技术, 2022, 44(6): 1957-1967. |
| [5] | 王帅, 向建军, 彭芳, 唐书娟. 基于新最速下降法的目标跟踪算法[J]. 系统工程与电子技术, 2022, 44(5): 1512-1519. |
| [6] | 辛怀声, 曹晨. 基于交互多模型的分组δ-广义标签多伯努利算法[J]. 系统工程与电子技术, 2022, 44(4): 1128-1138. |
| [7] | 谢家豪, 黄树彩, 韦道知, 张曌宇, 王文豪. 基于PEV准则的不确定混合多传感器联盟求解[J]. 系统工程与电子技术, 2022, 44(3): 819-826. |
| [8] | 张腾飞, 龚春林, 粟华, 薛鹏飞. 基于传热增广模型的轨迹优化与防热结构分析[J]. 系统工程与电子技术, 2022, 44(3): 929-938. |
| [9] | 余雪勇, 朱烨, 邱礼翔, 朱洪波. 基于无人机辅助边缘计算系统的节能卸载策略[J]. 系统工程与电子技术, 2022, 44(3): 1022-1029. |
| [10] | 宋子壮, 杨嘉伟, 张东方, 王诗强, 张硕. 基于无锚框的红外多类别多目标实时跟踪网络[J]. 系统工程与电子技术, 2022, 44(2): 401-409. |
| [11] | 姚云翔, 陈莹. 注意力机制下双模态交互融合的目标跟踪网络[J]. 系统工程与电子技术, 2022, 44(2): 410-419. |
| [12] | 辛怀声, 宋鹏汉, 曹晨. 多模型广义标签多伯努利滤波器[J]. 系统工程与电子技术, 2022, 44(12): 3603-3613. |
| [13] | 刘浩楠, 宋骊平. 基于核Fisher判别的群结构更新模型及群目标跟踪算法[J]. 系统工程与电子技术, 2022, 44(10): 3012-3019. |
| [14] | 方澄, 路稳, 姬菁颖, 宋玉蒙, 梁斐菲, 罗志伟. 基于外观相似性更新的相关滤波跟踪算法[J]. 系统工程与电子技术, 2022, 44(1): 117-126. |
| [15] | 张平安, 汪伟, 高敏, 王毅. SR-CH∞KF用于弹丸飞行姿态测量研究[J]. 系统工程与电子技术, 2022, 44(1): 262-269. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||