| 1 |
AKBARI A , PELOT R , EISELT H A . A modular capacitated multi-objective model for locating maritime search and rescue vessels[J]. Annals of Operations Research, 2018, 267 (1): 3- 28.
|
| 2 |
BREIVIK Ø , ALLEN A A . An operational search and rescue model for the Norwegian Sea and the North Sea[J]. Journal of Marine Systems, 2008, 69 (1): 99- 113.
|
| 3 |
肖方兵. 海上搜救决策支持系统关键技术的研究[D]. 大连: 大连海事大学, 2011.
|
|
XIAO F B. Research on the key technology of maritime search and rescue decision support system[D]. Dalian: Dalian Maritime University, 2011.
|
| 4 |
WAGNER W . A convergence proof for bird's direct simulation Monte Carlo method for the Boltzmann equation[J]. Journal of Statistical Physics, 1992, 66 (3): 1011- 1044.
|
| 5 |
MARTINS A, DIAS A, ALMEIDA J, et al. Field experiments for marine casualty detection with autonomous surface vehicles[C]//Proc. of the MTS/IEEE OCEANS, 2013.
|
| 6 |
江志. 基于群体智能算法的海上联合搜救[D]. 大连: 大连海事大学, 2020.
|
|
JIANG Z. Joint maritime search and rescue based on group intelligence algorithm[D]. Dalian: Dalian Maritime University, 2020.
|
| 7 |
BOUZID Y, BESTAOUI Y, SIGUERDIDJANE H. Quadrotor-UAV optimal coverage path planning in cluttered environment with a limited onboard energy[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2017: 979-984.
|
| 8 |
QUERALTA J P, RAITOHARJU J, GIA T N, et al. AutoSOS: towards multi-UAV systems supporting maritime search and rescue with lightweight AI and edge computing[J]. [EB/OL]. [2021-06-15]. https://arXiv.org/abs/2005.03409.
|
| 9 |
李亚南, 黄海滨, 庄宇飞, 等. 基于分布式反集群算法的无人水面艇区域覆盖方法[J]. 导航与控制, 2019, 18 (1): 60- 67.
doi: 10.3969/j.issn.1674-5558.2019.01.008
|
|
LI Y N , HUANG H B , ZHUANG Y F , et al. Area coverage of unmanned surface vehicle usingdistributed anti-flocking algorithm[J]. Navigation and Control, 2019, 18 (1): 60- 67.
doi: 10.3969/j.issn.1674-5558.2019.01.008
|
| 10 |
CHOSET H, PIGNON P. Coverage path planning: the boustrophedon cellular decomposition[M]//ZELINSKY A. Field and Service Robotics. London: Springer, 1998: 203-209.
|
| 11 |
LI B X, MORIDIAN B, MAHMOUDIAN N. Underwater multi-robot persistent area coverage mission planning[C]//Proc. of the MTS/IEEE OCEANS, 2016.
|
| 12 |
彭辉, 沈林成, 霍霄华. 多UAV协同区域覆盖搜索研究[J]. 系统仿真学报, 2007, 19 (11): 2472- 2476.
doi: 10.3969/j.issn.1004-731X.2007.11.022
|
|
PENG H , SHEN L C , HUO X H . Research on multiple UAV cooperative area coverage searching[J]. Journal of System Simulation, 2007, 19 (11): 2472- 2476.
doi: 10.3969/j.issn.1004-731X.2007.11.022
|
| 13 |
MATOS A, SILVA E, CRUZ N, et al. Development of an unmanned capsule for large-scale maritime search and rescue[C]//Proc. of the OCEANS-San Diego, 2013.
|
| 14 |
FERNANDEZ-PENA E , CASTELLANO J , AMATORI S , et al. A directional ellipse to describe directional behavior and player activity area in soccer[J]. Journal of Sports Engineering and Technology, 2021,
doi: 10.1177/17543371211024792
|
| 15 |
WANG H Y , TAN L , SHI J Q , et al. An improved NSGA-Ⅱ algorithm for UAV path planning problems[J]. Journal of Internet Technology, 2021, 22 (3): 583- 592.
|
| 16 |
DEB K , PRATAP A , AGARWAL S , et al. A fast and elitist multi objective genetic algorithm: NSGA-Ⅱ[J]. IEEE Trans.on Evolutionary Computation, 2002, 6 (2): 182- 197.
doi: 10.1109/4235.996017
|
| 17 |
JORGE V A M , GRANADA R , MAIDANA R G , et al. A survey on unmanned surface vehicles for disaster robotics: main challenges and directions[J]. Sensors, 2019, 19 (3): 702.
doi: 10.3390/s19030702
|
| 18 |
LIKAS A , VLASSIS N , J. VERBEEK J . The global k-means clustering algorithm[J]. Pattern Recognition, 2003, 36 (2): 451- 461.
doi: 10.1016/S0031-3203(02)00060-2
|
| 19 |
LU Y K , TIAN Z , PENG P , et al. GMM clustering for heating load patterns in-depth identification and prediction model accuracy improvement of district heating system[J]. Energy and Buildings, 2019, 190, 49- 60.
doi: 10.1016/j.enbuild.2019.02.014
|
| 20 |
BIERNACKI C , CELEUX G , GOVAERT G . Choosing starting values for the EM algorithm for getting the highest likelihood in multivariate Gaussian mixture models[J]. Computational Statistics & Data Analysis, 2003, 41 (3): 561- 575.
|
| 21 |
JEMAI J , ZEKRI M , MELLOULI K . An NSGA-Ⅱ algorithm for the green vehicle routing problem[M]. Berlin Heidelberg: Springer, 2012.
|
| 22 |
LIU Y , BUCKNALL R . Path planning algorithm for unmanned surface vehicle formations in a practical maritime environment[J]. Ocean Engineering, 2015, 97, 126- 144.
doi: 10.1016/j.oceaneng.2015.01.008
|
| 23 |
MA Y H, ZHANG H, ZHANG Y Z, et al. Coordinated optimization algorithm combining GA with cluster for multi-UAVs to multi-tasks task assignment and path planning[C]//Proc. of the IEEE 15th International Conference on Control and Automation, 2019: 1026-1031.
|
| 24 |
WEI F. Research on three-dimensional cooperative formation of sea and air for cruise and rescue[C]//Proc. of the MATEC Web of Conferences, 2017: 04006.
|
| 25 |
DU Z , WEN Y Q , XIAO C S , et al. Trajectory-cell based method for the unmanned surface vehicle motion planning[J]. Applied Ocean Research, 2019, 86, 207- 221.
doi: 10.1016/j.apor.2019.02.005
|
| 26 |
DU Z , WEN Y Q , XIAO C S , et al. Motion planning for unmanned surface vehicle based on trajectory unit[J]. Ocean Engineering, 2018, 151, 46- 56.
doi: 10.1016/j.oceaneng.2017.12.062
|
| 27 |
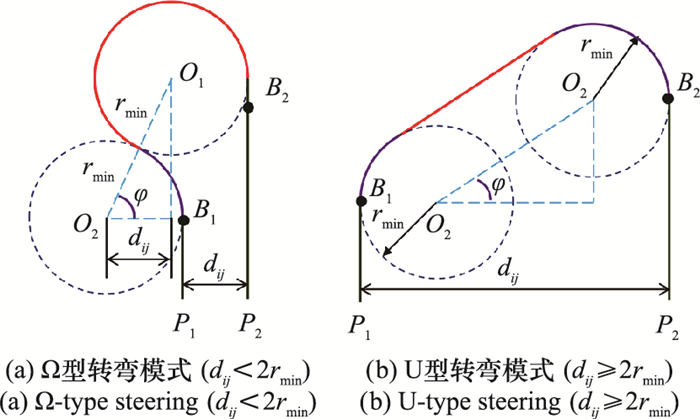
万明, 代忠, 褚文奎. 无人机扫描线区域覆盖中的转弯航迹规划[J]. 系统工程与电子技术, 2014, 36 (9): 1750- 1754.
|
|
WAN M , DAI Z , CHU W K . Turning path planning for UAV in region coverage with scanline[J]. Systems Engineering and Electronics, 2014, 36 (9): 1750- 1754.
|
| 28 |
PONNAMBALAM S G , JAGANNATHAN H , KATARIA M , et al. A TSP-GA multi-objective algorithm for flow-shop scheduling[J]. The International Journal of Advanced Manufacturing Technology, 2004, 23 (11): 909- 915.
|
| 29 |
李玉林. 大田作物机械化收运系统精益运作及关键问题研究[D]. 重庆: 重庆大学, 2015.
|
|
LI Y L. Research on lean operation and key issues of mechanized crop harvesting-to-transport system[D]. Chongqing: Chongqing University, 2015.
|
| 30 |
赵德润. 无人船区域全覆盖路径规划与跟踪技术的研究[D]. 大连: 大连海事大学, 2020.
|
|
ZHAO D R. Research on regional full-coverage path planning and tracking technology for unmanned vessels[D]. Dalian: Dalian Maritime University, 2020.
|
| 31 |
RAHMAN M M , ISHⅡ K , NOGUCHI N . Optimum harvesting area of convex and concave polygon field for path planning of robot combine harvester[J]. Intelligent Service Robotics, 2019, 12 (2): 167- 179.
doi: 10.1007/s11370-018-00273-4
|
| 32 |
VAN VELDHUIZEN D A, LAMONT G B. Evolutionary computation and convergence to a pareto front[C]//Proc. of the Late Breaking Papers at the Genetic Programming Conference, 1998: 221-228.
|
| 33 |
HUANG W H. Optimal line-sweep-based decompositions for coverage algorithms[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2001: 27-32.
|