
系统工程与电子技术 ›› 2022, Vol. 44 ›› Issue (7): 2251-2262.doi: 10.12305/j.issn.1001-506X.2022.07.21
冯豪博, 胡桥*, 赵振轶
收稿日期:2021-06-28
出版日期:2022-06-22
发布日期:2022-06-28
通讯作者:
胡桥
作者简介:冯豪博(1998—), 男, 硕士研究生, 主要研究方向为水下机器人集群路径规划|胡桥(1977—), 男, 教授, 博士, 主要研究方向为水下智能感知与仿生机器人|赵振轶(1993—), 男, 博士研究生, 主要研究方向为水下无人集群策略
基金资助:Haobo FENG, Qiao HU*, Zhenyi ZHAO
Received:2021-06-28
Online:2022-06-22
Published:2022-06-28
Contact:
Qiao HU
摘要:
针对传统路径规划算法仅能规划单一最短路径且不能调节路径宽度而难以适用于自主式水下航行器(autonomous underwater vehicle, AUV)集群航路规划的缺陷, 提出了精英族系遗传算法(elite family genetic algorithm, EFGA)。该算法将基因适应度加入适应度评价函数中, 同时在进化过程中标记精英个体作为多路径规划结果, 并在该算法基础上针对AUV集群路径规划问题设计了一种多智能体路径规划(multi-agent path planning, MAPP)方法。仿真结果表明, 该算法可以求解无冲突路径集合实现MAPP, 通过实现AUV集群的最优多路径航行方案减少集群的航行耗时, 且能够满足不同AUV编队规模对可调路径宽度的需求。
中图分类号:
冯豪博, 胡桥, 赵振轶. 基于精英族系遗传算法的AUV集群路径规划[J]. 系统工程与电子技术, 2022, 44(7): 2251-2262.
Haobo FENG, Qiao HU, Zhenyi ZHAO. AUV swarm path planning based on elite family genetic algorithm[J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262.

图1
栅格空间建模"

图2
基于编队规模的粒度划分"
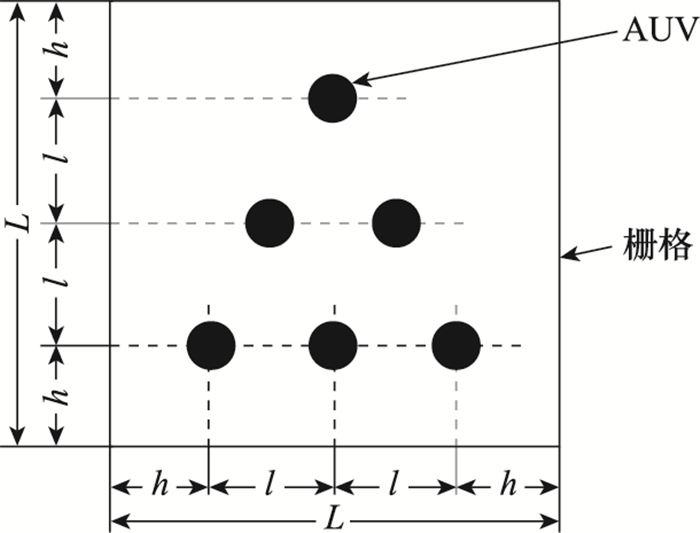

图3
基于环境复杂系数的粒度划分"


图4
显性基因与隐性基因"


图5
基因序列"


图6
斜穿不可达栅格"


图7
变异算子"

表1
EFGA参数"
| 算法 | 参数 | |||||||||
| 精英个体数 | Pr | Pe | Pm | Pc | Cxcoef | Cycoef | kx | ky | me | |
| EFGA-1 | 1 | |||||||||
| EFGA-2 | 2 | [0.1, 0.2] | [0.1, 0.3] | 0.15 | 0.1 | 2×n | 0 | 1 | 0 | 20 |
| EFGA-3 | 3 | |||||||||
| EFGA-4 | 1 | |||||||||
| EFGA-5 | 3 | [0.1, 0.2] | [0.1, 0.3] | 0.15 | 0.1 | 2×n | 0 | 1 | 0 | 20 |
| EFGA-6 | 18×n | |||||||||
| EFGA-7 | 1 | 2×n | 2×n | 20 | ||||||
| EFGA-8 | 2 | [0.1, 0.2] | [0.1, 0.3] | 0.3 | 0.1 | 2×n | 2×n | 0.5 | 0.5 | 15 |
| EFGA-9 | 3 | 18×n | 18×n | 10 | ||||||
| EFGA-10 | 1 | |||||||||
| EFGA-11 | 2 | [0.1, 0.2] | [0.1, 0.3] | 0.15 | 0.1 | ∞ | 0 | 1 | 0 | 20 |
| EFGA-12 | 3 | |||||||||
| EFGA-13 | 3 | 10 | ||||||||
| EFGA-14 | 2 | [0.1, 0.2] | [0.1, 0.3] | 0.15 | 0.1 | ∞ | ∞ | 0.5 | 0.5 | 15 |
| EFGA-15 | 1 | 20 | ||||||||

图8
简单环境下多路径规划典型求解结果"

表2
EFGA-1~EFGA-3的仿真统计数据"
| 参数 | 算法 | |||
| EFGA-1 | EFGA-2 | EFGA-3 | ||
| 平均收敛代数 | 66.47 | 118.80 | 211.96 | |
| 平均收敛耗时/s | 0.653 | 1.023 | 1.651 | |
| 平均各路径长度/m | 路径-1 | 30.044 | 29.662 | 29.416 |
| 路径-2 | — | 30.540 | 30.204 | |
| 路径-3 | — | — | 30.984 | |
| 平均路径长度/m | 30.044 | 30.101 | 30.201 | |
| 平均路径重合度/% | — | 0.19 | 0.78 | |
表3
EFGA-4~EFGA-6的仿真统计数据"
| 参数 | 算法 | |||
| EFGA-4 | EFGA-5 | EFGA-6 | ||
| 平均收敛代数 | 199.38 | 206.19 | 207.56 | |
| 平均收敛耗时/s | 1.573 | 1.608 | 1.626 | |
| 平均各路径长度/m | 路径-1 | 29.638 | 29.364 | 29.520 |
| 路径-2 | 29.674 | 30.174 | 30.426 | |
| 路径-3 | 30.468 | 30.872 | 31.538 | |
| 平均路径长度/m | 29.927 | 30.137 | 30.495 | |
| 平均路径重合度/% | 1.72 | 0.82 | 0.52 | |

图9
复杂环境下多路径规划典型求解结果"

表4
EFGA-7~EFGA-9的仿真统计数据"
| 参数 | 算法 | |||
| EFGA-7 | EFGA-8 | EFGA-9 | ||
| 平均收敛代数 | 77.56 | 217.54 | 341.60 | |
| 平均收敛耗时/s | 17.089 | 21.079 | 24.862 | |
| 平均各路径长度/m | 路径-1 | 76.090 | 75.910 | 75.688 |
| 路径-2 | — | 79.700 | 80.080 | |
| 路径-3 | — | — | 84.116 | |
| 平均路径长度/m | 76.090 | 77.805 | 79.961 | |
| 平均路径重合度/% | — | 6.45 | 14.30 | |

图10
环境空间"


图11
独立航行方式情况下AUV集群路径规划典型求解结果"

表5
基于EFGA-10~EFGA-12的AUV集群路径规划结果统计数据"
| 参数 | 算法 | |||
| EFGA-10 | EFGA-11 | EFGA-12 | ||
| 平均原始路径长度/m | 路径-1 | 29.980 | 29.544 | 29.512 |
| 路径-2 | — | 30.678 | 30.256 | |
| 路径-3 | — | — | 31.364 | |
| 平均当量路径长度/m | 路径-1 | 39.980 | 34.984 | 33.772 |
| 路径-2 | — | 35.238 | 33.686 | |
| 路径-3 | — | — | 33.674 | |
| 平均行进耗时/s | 38.980 | 34.380 | 33.044 | |
| 平均算法运行总耗时/s | 3.935 | 4.260 | 9.056 | |

图12
AUV编队集群路径规划典型求解结果"

表6
基于EFGA-13~EFGA-15的AUV编队集群路径规划结果统计数据"
| 参数 | AUV集群路径规划 | |||
| 无编队 | 三机编队 | 六机编队 | ||
| 平均原始路径长度/m | 路径-1 | 29.384 | 31.715 | 32.200 |
| 路径-2 | 30.164 | 32.637 | — | |
| 路径-3 | 31.114 | — | — | |
| 平均当量路径长度/m | 路径-1 | 34.294 | 37.259 | 39.664 |
| 路径-2 | 34.164 | 38.021 | — | |
| 路径-3 | 34.204 | — | — | |
| 平均行进耗时/s | 33.554 | 36.101 | 37.664 | |
| 平均算法运行总耗时/s | 9.776 | 12.807 | 11.291 | |
| 1 | WEI T, MIAO Y, XIAO B Q, et al. Research on autonomous control technology of underwater unmanned swarm based on center transfer[C]//Proc. of the 5th International Conference on Automation, Control and Robotics Engineering, 2020: 430-434. |
| 2 |
陶伟, 张晓霜. 国外水下无人集群应用及关键技术研究[J]. 舰船电子工程, 2021, 41 (2): 9- 13, 54.
doi: 10.3969/j.issn.1672-9730.2021.02.003 |
|
TAO W , ZHANG X S . Research on application and key technology of underwater unmanned cluster abroad[J]. Ship Electronic Engineering, 2021, 41 (2): 9- 13, 54.
doi: 10.3969/j.issn.1672-9730.2021.02.003 |
|
| 3 | MAGNUSON S . DARPA pushes "Mosaic Warfare" concept[J]. National Defense, 2018, 103 (780): 18- 19. |
| 4 | 黄琰, 李岩, 俞建成, 等. AUV智能化现状与发展趋势[J]. 机器人, 2020, 42 (2): 215- 231. |
| HUANG Y , LI Y , YU J C , et al. State-of-the-art and development trends of AUV intelligence[J]. Jiqiren/Robot, 2020, 42 (2): 215- 231. | |
| 5 |
CAO X , SUN H B , JAN G E . Multi-AUV cooperative target search and tracking in unknown underwater environment[J]. Ocean Engineering, 2018, 150, 1- 11.
doi: 10.1016/j.oceaneng.2017.12.037 |
| 6 |
ZHU D Q , ZHOU B , YANG S X . A novel algorithm of multi-AUVs task assignment and path planning based on biologically inspired neural network map[J]. IEEE Trans.on Intelligent Vehicles, 2021, 6 (2): 333- 342.
doi: 10.1109/TIV.2020.3029369 |
| 7 | YAN Z P , ZHANG J Z , ZENG J , et al. Water wave optimization algorithm for autonomous underwater vehicle path planning problem[J]. Journal of Intelligent & Fuzzy Systems, 2021, 40 (5): 9127- 9141. |
| 8 | 刘庆周, 吴锋. 多智能体路径规划研究进展[J]. 计算机工程, 2020, 46 (4): 1- 10. |
| LIU Q Z , WU F . Research progress of multi-agent path planning[J]. Computer Engineering, 2020, 46 (4): 1- 10. | |
| 9 | BABEL L . Coordinated target assignment and UAV path planning with timing constraints[J]. Journal of Intelligent & Robotic Systems, 2019, 94 (3/4): 857- 869. |
| 10 |
LIU M Y , XU B G , PENG X G . Cooperative path planning for multi-AUV in time-varying ocean flows[J]. Journal of Systems Engineering and Electronics, 2016, 27 (3): 612- 618.
doi: 10.1109/JSEE.2016.00065 |
| 11 | CAI L, ZHOU G F, ZHANG S J. Multi-AUV collaborative hunting method for the non-cooperative target in underwater environment[C]//Proc. of the 3rd International Conference on Advanced Robotics and Mechatronics, 2019: 72-76. |
| 12 |
YU X , CHEN W N , HU X M , et al. Path planning in multiple-AUV systems for difficult target traveling missions: a hybrid metaheuristic approach[J]. IEEE Trans.on Cognitive and Developmental Systems, 2020, 12 (3): 561- 574.
doi: 10.1109/TCDS.2019.2944945 |
| 13 | SANG H Q , YOU Y S , SUN X J , et al. The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations[J]. Ocean Engineering, 2021, 223 (3/4): 108709- 108724. |
| 14 | 王乐乐, 眭泽智, 蒲志强, 等. 一种改进RRT的多机器人编队路径规划算法[J]. 电子学报, 2020, 48 (11): 2138- 2145. |
| WANG L L , SUI Z Z , PU Z Q , et al. An improved RRT algorithm for multi-robot formation path planning[J]. Acta Electronica Sinica, 2020, 48 (11): 2138- 2145. | |
| 15 |
LIMA J , BELO E M , MARQUES V . Multi-agent path planning with nonlinear restrictions[J]. Evolutionary Intelligence, 2021, 14 (1): 191- 201.
doi: 10.1007/s12065-020-00534-1 |
| 16 |
李征, 陈建伟, 彭博. 基于伪谱法的无人机集群飞行路径规划[J]. 空天防御, 2021, 4 (1): 52- 59.
doi: 10.3969/j.issn.2096-4641.2021.01.009 |
|
LI Z , CHEN J W , PENG B . UAV cluster path planning based on pseudospectral method[J]. Air & Space Defense, 2021, 4 (1): 52- 59.
doi: 10.3969/j.issn.2096-4641.2021.01.009 |
|
| 17 | 丁佳宇, 王茂森, 戴劲松. 基于前馈控制人工势场法的无人机群系统设计[J]. 传感器与微系统, 2021, 40 (5): 114- 117, 120. |
| DING J Y , WANG M S , DAI J S . Design of UAV group system based on feedforward control artificial potential field method[J]. Transducer and Microsystem Technologies, 2021, 40 (5): 114- 117, 120. | |
| 18 |
HAN J . An efficient approach to 3D path planning[J]. Information Sciences, 2019, 478, 318- 330.
doi: 10.1016/j.ins.2018.11.045 |
| 19 |
BLASI L , D'AMATO E , MATTEI M , et al. Path planning and real-time collision avoidance based on the essential visibility graph[J]. Applied Sciences, 2020, 10 (16): 5613- 5635.
doi: 10.3390/app10165613 |
| 20 |
ZHANG J D , WANG W , QI X Y , et al. Social and robust navigation for indoor robots based on object semantic grid and topological map[J]. Applied Sciences, 2020, 10 (24): 8991- 9010.
doi: 10.3390/app10248991 |
| 21 |
WANG P L , ZHANG T , XIAO Y J . Emergency evacuation path planning of passenger ship based on cellular ant optimization model[J]. Journal of Shanghai Jiaotong University (Science), 2020, 25 (6): 721- 726.
doi: 10.1007/s12204-020-2215-y |
| 22 |
李文刚, 汪流江, 方德翔, 等. 联合A*与动态窗口法的路径规划算法[J]. 系统工程与电子技术, 2021, 43 (12): 3694- 3702.
doi: 10.12305/j.issn.1001-506X.2021.12.33 |
|
LI W G , WANG L J , FANG D X , et al. Path planning algorithm combining A* with DWA[J]. Systems Engineering and Electronics, 2021, 43 (12): 3694- 3702.
doi: 10.12305/j.issn.1001-506X.2021.12.33 |
|
| 23 |
SAMPSON J R . Adaptation in natural and artificial systems[J]. SIAM Review, 1976, 18 (3): 529- 530.
doi: 10.1137/1018105 |
| 24 | MA J W , LIU Y , ZANG S F , et al. Robot path planning based on genetic algorithm fused with continuous bezier optimization[J]. Computational Intelligence and Neuroscience, 2020, 9813040. |
| 25 | LI L, GU Q, LIU L. Research on path planning algorithm for multi-UAV maritime targets search based on genetic algorithm[C]//Proc. of the IEEE International Conference on Information Technology, Big Data and Artificial Intelligence, 2020: 840-843. |
| 26 |
CAO Y , WEI W Y , BAI Y , et al. Multi-base multi-UAV cooperative reconnaissance path planning with genetic algorithm[J]. Cluster Computing, 2019, 22 (S3): 5175- 5184.
doi: 10.1007/s10586-017-1132-9 |
| 27 | ZHAO H, ZHAN Z H, CHEN W N, et al. An improved selection operator for multi-objective optimization[C]//Proc. of the 16th International Symposium on Neural Networks, 2019: 379-388. |
| 28 |
CHEN X N , GAO P J . Path planning and control of soccer robot based on genetic algorithm[J]. Ambient Intelligence and Humanized Computing, 2020, 11 (12): 6177- 6186.
doi: 10.1007/s12652-019-01635-1 |
| 29 | KIRAZ B, BIDGOLI A, EBRAHIMPOUR-KOMLEH H, et al. A novel collective crossover operator for genetic algorithms[C]//Proc. of the IEEE International Conference on Systems, Man, and Cybernetics, 2020: 4204-4209. |
| 30 |
MANZONI L , MARIOT L , TUBA E . Balanced crossover operators in genetic algorithms[J]. Swarm and Evolutionary Computation, 2020, 54, 100646.
doi: 10.1016/j.swevo.2020.100646 |
| [1] | 骆天溯, 赵灵峰, 冯蕴雯, 薛小锋, 路成. 基于METRIC理论的超大规模卫星星座多级备份策略[J]. 系统工程与电子技术, 2022, 44(7): 2181-2190. |
| [2] | 李波, 周家豪, 刘民岷, 朱品朝. 基于改进NSGA3的焊接缺陷评估特征选择[J]. 系统工程与电子技术, 2022, 44(7): 2211-2218. |
| [3] | 杨少龙, 黄金, 向先波, 李伟超. 基于置信椭圆的无人艇区域覆盖搜寻规划优化[J]. 系统工程与电子技术, 2022, 44(7): 2263-2269. |
| [4] | 冯蕴雯, 陈俊宇, 路成. 民用飞机多地域航材支援网络模型研究[J]. 系统工程与电子技术, 2022, 44(5): 1553-1561. |
| [5] | 靳鹏, 唐晓茜. 考虑合成机制的多星应急任务调度[J]. 系统工程与电子技术, 2022, 44(4): 1270-1281. |
| [6] | 孙剑炜, 王超, 施庆展, 任文博, 尧泽昆, 袁乃昌. 基于遗传算法的相位调制波形智能优化[J]. 系统工程与电子技术, 2022, 44(3): 722-729. |
| [7] | 薛乃阳, 丁丹, 王红敏, 刘步花. 基于改进遗传算法的多类测控资源调度方法[J]. 系统工程与电子技术, 2021, 43(9): 2535-2543. |
| [8] | 陈云翔, 饶益, 蔡忠义, 王泽洲. 基于改进相似性的装备部件剩余寿命预测及经济性储备策略[J]. 系统工程与电子技术, 2021, 43(9): 2688-2696. |
| [9] | 赵禄达, 王斌, 曾威. 进攻战斗电子对抗兵力需求的三层规划模型[J]. 系统工程与电子技术, 2021, 43(6): 1564-1571. |
| [10] | 王力, 刘子奇. WPA-IGA-BP神经网络的模拟电路故障诊断[J]. 系统工程与电子技术, 2021, 43(4): 1133-1143. |
| [11] | 胡春宇, 刘卫东, 于天翔, 周立尧, 冯晨. 基于无人机实时数据多波次任务规划模型分析[J]. 系统工程与电子技术, 2021, 43(3): 747-754. |
| [12] | 闫珍珍, 李波, 杨懋, 闫中江. 基于遗传算法的混叠式非正交多址接入方法[J]. 系统工程与电子技术, 2021, 43(3): 832-838. |
| [13] | 刘庆国, 刘新学, 武健, 李亚雄, 陈豪. 基于改进NSGA-Ⅲ的多SGSW火力分配优化[J]. 系统工程与电子技术, 2020, 42(9): 1995-2002. |
| [14] | 张盛魁, 姚志成, 何岷, 范志良, 杨剑. 基于时频方差聚类的FH信号参数盲估计[J]. 系统工程与电子技术, 2020, 42(8): 1662-1667. |
| [15] | 郭媛, 索志勇, 王婷婷, 廖志强. 弹载SAR系统参数优化设计方法[J]. 系统工程与电子技术, 2020, 42(7): 1478-1483. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||