
系统工程与电子技术 ›› 2022, Vol. 44 ›› Issue (3): 908-920.doi: 10.12305/j.issn.1001-506X.2022.03.23
庞维建1,2, 李辉1,*, 黄谦1, 李朋1, 马贤明1
收稿日期:2021-01-22
出版日期:2022-03-01
发布日期:2022-03-10
通讯作者:
李辉
作者简介:庞维建(1986—), 男, 工程师, 博士研究生, 主要研究方向为军事运筹、无人系统作战理论与技术|李辉(1964—), 男, 研究员, 硕士, 主要研究方向为军事运筹、军事评估|黄谦(1968—), 男, 研究员, 博士, 主要研究方向为战略运筹分析、联合作战模拟|李朋(1988—), 男, 工程师,博士研究生, 主要研究方向为网络信息体系|马贤明(1979—), 男, 助理研究员, 硕士, 主要研究方向为作战仿真、军事通信
基金资助:Weijian PANG1,2, Hui LI1,*, Qian HUANG1, Peng LI1, Xianming MA1
Received:2021-01-22
Online:2022-03-01
Published:2022-03-10
Contact:
Hui LI
摘要:
作战知识是提高无人系统的自主作战能力的重要因素。如何系统规范地存储和表示作战知识, 使无人系统能够根据高层任务指令, 自主完成任务规划, 并基于不断更新的战场知识进行重规划和智能决策, 是一个新的研究领域。首先, 通过对任务规划领域概念、规划方法和知识表示方法的梳理, 提出了基于本体的任务规划框架。然后, 总结了本体在机器人、无人系统、军事任务规划等领域的应用情况, 分析了当前研究的特点和不足, 并提出了该领域的重要研究方向。最后, 针对构建无人系统任务规划本体时应遵循的原则和需要关注的关键能力指标进行了论述。
中图分类号:
庞维建, 李辉, 黄谦, 李朋, 马贤明. 基于本体的无人系统任务规划研究综述[J]. 系统工程与电子技术, 2022, 44(3): 908-920.
Weijian PANG, Hui LI, Qian HUANG, Peng LI, Xianming MA. Review on ontology-based task planning for unmanned systems[J]. Systems Engineering and Electronics, 2022, 44(3): 908-920.

图1
用于估计海洋污染紧急程度的MEBN模型"
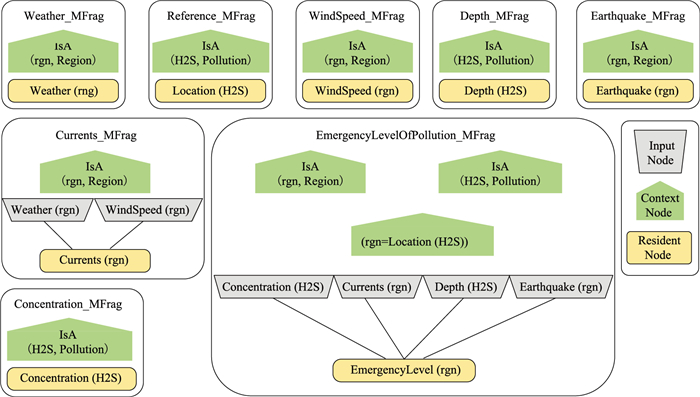
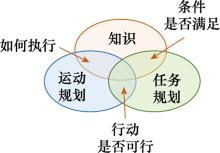
图2
知识与TMP关系"


图3
基于本体的任务规划框架"
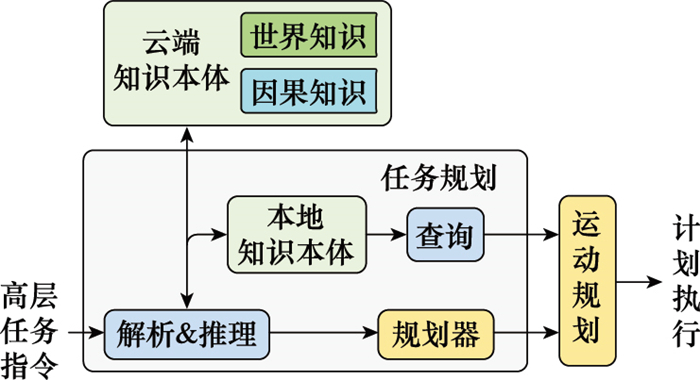
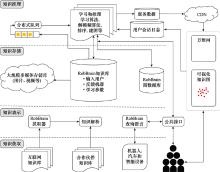
图4
RoboBrain系统框架图"

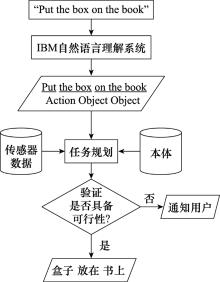
图5
具备空间智能的智能规划流程图"
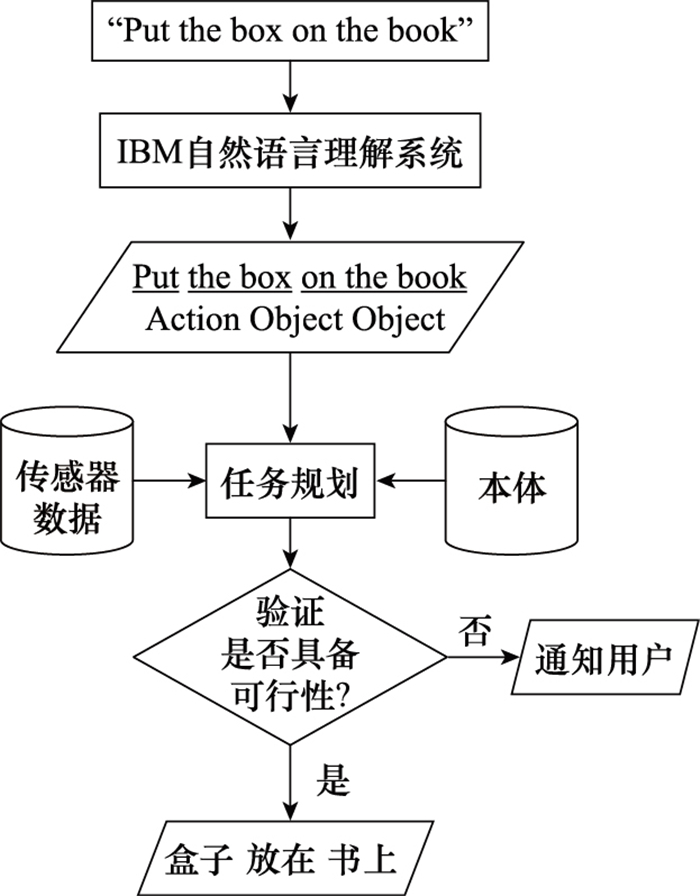

图6
SWARMs本体结构"
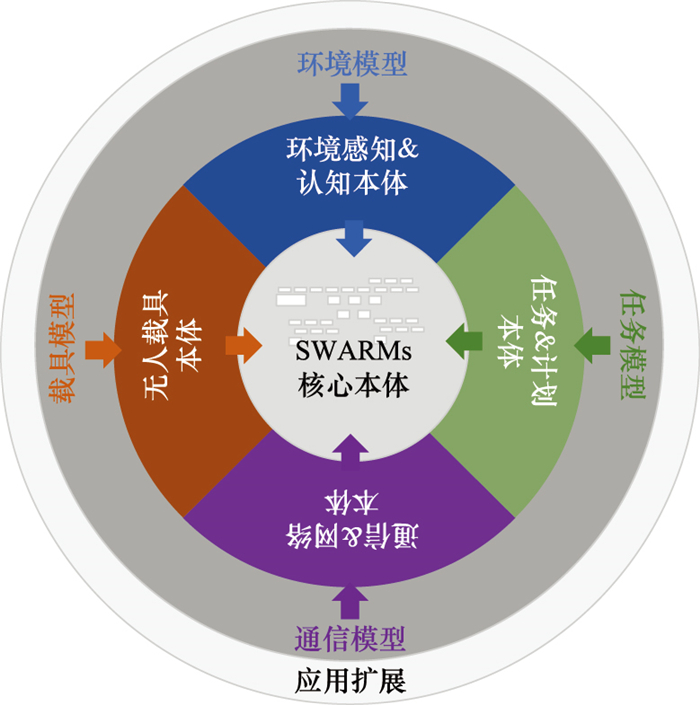
表1
典型无人系统本体情况对比"
| 名称 | 规模 | 应用领域 | 表示方法 | 知识推理 |
| RoboBrain | 超大规模 | 服务型机器人 | Graph structure | Robot Query Language (RQL) |
| KnowRob | 小型 | 服务型机器人 | Web OWL | SWI-prolog |
| RoboEarth | 大规模 | 服务型机器人 | OWL | Rapyuta |
| 文献[ | 小型 | 服务型机器人 | OWL | HermiT |
| ORO | 大型 | 机器人社区 | OWL | Pellet |
| PMK | 小型 | 机械臂 | OWL | SWI-prolog |
| RTPO | 小型 | 服务型机器人 | OWL | SWI-prolog |
| ICA | 小型 | 无人潜航器 | OWL | - |
| 空间站任务本体 | 小型 | 空间站 | OWL | - |
| SWARMs | 小型 | 海洋无人装备 | PR-OWL | Pellet |
| 无人驾驶汽车 | 小型 | 无人驾驶 | OWL | SWI-prolog |
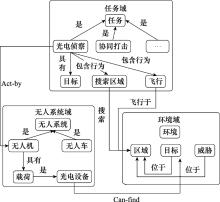
图7
无人作战系统任务本体"

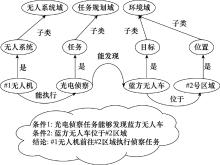
图8
知识推理过程示意图"

| 1 | 金伟, 周震博. 2018年无人机研发热点回眸[J]. 科技导报, 2019, 37 (1): 163- 172. |
| JIN W , ZHOU Z B . Review on frontier hotspots of unmanned aircraft systems in 2018[J]. Science & Technology Review, 2019, 37 (1): 163- 172. | |
| 2 | 段海滨, 申燕凯, 王寅, 等. 2018年无人机领域热点评述[J]. 科技导报, 2019, 37 (3): 82- 90. |
| DUAN H B , SHEN Y K , WANG Y , et al. Review of technological hot spots of unmanned aerial vehicle in 2018[J]. Science & Technology Review, 2019, 37 (3): 82- 90. | |
| 3 | 沈林成, 牛轶峰, 朱华勇. 多无人机自主协同控制理论与方法[M]. 2版. 北京: 国防工业出版社, 2018. |
| SHEN L C , NIU Y F , ZHU H Y . Theories and methods of autonomous cooperative control for Multi-UAVs[M]. 2nd ed. Beijing: National Defense Industry Press, 2018. | |
| 4 | 邓长春, 籍长国, 李小奇. 无人机作战应用论[M]. 北京: 蓝天出版社, 2011. |
| DENG C C , JI C G , LI X Q . Operational applications theory of UAV[M]. Beijing: Blue Sky Press, 2011. | |
| 5 | 李梦晗, 汪子盛, 徐楠, 等. 国内外轻型地面无人平台研究现状及发展趋势分析[J]. 专用汽车, 2019, 271 (12): 56- 60. |
| LI M H , WANG Z S , XU N , et al. Analysis of the research status and development trend of light unmanned ground platform at home and abroad[J]. Special Purpose Vehicle, 2019, 271 (12): 56- 60. | |
| 6 | U.S. Army. Unmanned aircraft systems roadmap 2005-2030[R]. Washington D. C. : Office of the Secretary of Defense, 2005: 1-213. |
| 7 | 张阳, 司光亚, 王艳正. 无人机集群网电攻击行动协同目标分配建模[J]. 系统工程与电子技术, 2019, 41 (9): 2025- 2033. |
| ZHANG Y , SI G Y , WANG Y Z . Modeling of cooperation target allocation of the UAV swarm cyberspace attack action[J]. Systems Engineering and Electronics, 2019, 41 (9): 2025- 2033. | |
| 8 |
张阳, 司光亚, 王艳正. 无人集群作战建模与仿真综述[J]. 电子信息对抗技术, 2018, 33 (3): 30- 36.
doi: 10.3969/j.issn.1674-2230.2018.03.007 |
|
ZHANG Y , SI G Y , WANG Y Z . Review on modeling and simu- lation of unmanned swarm operation[J]. Electronic Information Warfare Technology, 2018, 33 (3): 30- 36.
doi: 10.3969/j.issn.1674-2230.2018.03.007 |
|
| 9 | 吴森堂. 导弹自主编队协同制导控制技术[M]. 北京: 国防工业出版社, 2015. |
| WU S T . Cooperative guidance & control of missiles autonomous formation[M]. Beijing: National Defense Industry Press, 2015. | |
| 10 |
MOUSAVI S , AFGHAH F , ASHDOWN J D , et al. Use of a quantum genetic algorithm for coalition formation in large-scale UAV networks[J]. Ad Hoc Networks, 2019, 87, 26- 36.
doi: 10.1016/j.adhoc.2018.11.008 |
| 11 | MENG H, XIN G Z. UAV route planning based on the genetic simulated annealing algorithm[C]//Proc. of the IEEE International Conference on Mechatronics and Automation, 2010: 788-793. |
| 12 | SHIN J J , BANG H . UAV path planning under dynamic threats using an improved PSO algorithm[J]. International Journal of Aerospace Engineering, 2020, 8820284. |
| 13 | 王和平, 柳长安, 李为吉. 基于蚁群算法的无人机任务规划[J]. 西北工业大学学报, 2005, 23 (1): 98- 101. |
| WANG H P , LIU C A , LI W J . An optimizing UAV(unmanned aerial vehicle) mission planning with ANT algorithm[J]. Journal of Northwestern Polytechnical University, 2005, 23 (1): 98- 101. | |
| 14 | 施孟佶. 复杂环境下多智能体一致性控制及其在协同飞行中的应用[D]. 成都: 电子科技大学, 2017. |
| SHI M J. Consensus control of multi-agent systems in complex environments and its applications in cooperative flight control of unmanned aerial vehicles[D]. Chengdu: University of Electronic Science and Technology of China, 2017. | |
| 15 | 菅垄. 面向一致性的多智能体系统事件触发控制和分布式优化研究[D]. 成都: 电子科技大学, 2019. |
| JIAN L. On event-triggered control and distributed optimization for consensus of multi-agent systems[D]. Chengdu: University of Electronic Science and Technology of China, 2019. | |
| 16 | NUGRAHA Y , CETINKAY A , HAYAKAW T , et al. Dynamic resilient network games with applications to multi-agent consensus[J]. IEEE Trans.on Control of Network Systems, 2020, 8 (1): 246- 259. |
| 17 | RAJPATHAK D G. Intelligent scheduling-a literature review[R]. Milton Keynes: Knowledge Media Institute, The Open University, 2001: 1-69. |
| 18 | BACCHUS F , KABANZA F . Using temporal logics to express search control knowledge for planning[J]. Artificial Intelligence, 2000, 116 (1/2): 123- 191. |
| 19 |
EROL K , NAU D S , SUBRAHMANIAN V S . On the complexity of domain-independent planning[J]. Artificial Intelligence, 1992, 56, 223- 254.
doi: 10.1016/0004-3702(92)90028-V |
| 20 | RUDI S V , RICHARD B , DIETER F . Knowledge enginee-ring: principles and methods[J]. Data & Knowledge Enginee-ring, 1998, 25, 161- 197. |
| 21 | 王琦文. 战场态势推理关键技术研究及应用[D]. 西安: 西安电子科技大学, 2018. |
| WANG Q W. Research and application of key techniques of battlefield situational reasoning[D]. Xi'an: Xidian University, 2018. | |
| 22 |
LI X , BILBAO S , TAMARAM M J B , et al. SWARMs onto-logy: a common information model for the cooperation of under- water robots[J]. Sensors, 2017, 17 (3): 569- 588.
doi: 10.3390/s17030569 |
| 23 |
YAZDANI F , BLUMENTHAL S , HUEBEL N , et al. Query-based integration of heterogeneous knowledge bases for search and rescue tasks[J]. Robotics and Autonomous Systems (RAS), 2019, 117, 80- 91.
doi: 10.1016/j.robot.2019.03.013 |
| 24 | CARLOS C I . Intelligent autonomy for unmanned marine vehicles[M]. Switzerland: Springer Cham, 2015. |
| 25 | GENG X L, LIANG H W, XU H, et al. Human-driver speed profile modeling for autonomous vehicle's velocity strategy on curvy paths[C]//Proc. of the IEEE Intelligent Vehicles Symposium, 2016: 755-760. |
| 26 |
SUN X L , ZHANG Y , CHEN J . RTPO: a domain knowledge base for robot task planning[J]. Electronics, 2019, 8 (10): 1105- 1124.
doi: 10.3390/electronics8101105 |
| 27 | BARTK R. On the boundary of planning and scheduling: a study[C]//Proc. of the 18th Workshop of the UK Planning and Scheduling Special Interest Group, 1999. |
| 28 | PEREZ A G, BENJAMINS V R. Overview of knowledge sharing and reuse components: ontologies and problem-solving methods[C]//Proc. of the IJCAI-99 Workshop on Ontologies and Problem-Solving Methods, 1999. |
| 29 |
FIKES R E , NILSSON N J . STRIPS: a new approach to the application of theorem proving to problem solving[J]. Artificial Intelligence, 1971, 2 (3-4): 189- 208.
doi: 10.1016/0004-3702(71)90010-5 |
| 30 |
WILKINS D E . Can AI planners solve practical problems?[J]. Computational Intelligence, 1990, 6 (4): 232- 246.
doi: 10.1111/j.1467-8640.1990.tb00297.x |
| 31 | PUTERMAN M . Markov decision processes: discrete stochastic dynamic programming[M]. New Jersey: John Wiley & Sons, 2014. |
| 32 | PEDNAULT E. ADL: exploring the middle ground between STRIPS and the situation calculus[C]//Proc. of the 1st International Conference on Principles of Knowledge Representation and Reasoning, 1989: 324-332. |
| 33 | GHALLAB M, KNOBLOCK C, WILKINS D, et al. PDDL-The planning domain definition language[R]. Connecticut: Yale Center for Computational Vision and Control, 1998: 1-26. |
| 34 |
FOX M , LONG D . PDDL2.1: an extension to PDDL for expressing temporal planning domains[J]. Journal of Artificial Intelligence Research, 2003, 20, 61- 124.
doi: 10.1613/jair.1129 |
| 35 | HERTLE A, DORNHEGE C, KELLER T, et al. Planning with semantic attachments: an object-oriented view[C]//Proc. of the 20th European Conference on Artificial Intelligence, 2012: 402-407. |
| 36 | NAU D S, GUPTA S K, REGLI W C. AI planning versus manufacturing-operation planning: a case study[R]. Cambridge: Harvard University, 1995: 1-8. |
| 37 | KNOBLOCK C A. Building a planner for information gathe-ring: a report from the trenches[C]//Proc. of the 3rd International Conference on Artificial Intelligence Planning Systems, 1996: 134-141. |
| 38 | AUSTIN T. Plan ontology-a working document[R]. Edinburgh: The University of Edinburgh, 1994. |
| 39 |
ANDRE VALENTE . Knowledge-level analysis of planning systems[J]. Sigart Bulletin, 1995, 6 (1): 33- 41.
doi: 10.1145/202187.202195 |
| 40 | YOLANDA G A G, JIM B. PLANET: a shareable and reusable ontology for representing plans[C]//Proc. of the AAAI Workshop on Representational Issues for Real-world Planning Systems, 2000. |
| 41 | RAJPATHAK D, MOTTA E. An ontological formalization of the planning task[C]//Proc. of the Ontological Formalization of the Planning Task, 2004: 305-346. |
| 42 | ENRICO M . Reusable components for knowledge modelling-principles and case studies in parametric design problem solving[M]. The Netherlands: IOS Press, 1999. |
| 43 | DEBORAH L, MCGUINNES S, HARMELEN F V. OWL web ontology language overview[R]. California: W3C Recommendation, 2004: 1-12. |
| 44 |
BOBILLO F , STRACCIA U . Fuzzy ontology representation using OWL2[J]. International Journal of Approximate Reaso-ning, 2011, 52 (7): 1073- 1094.
doi: 10.1016/j.ijar.2011.05.003 |
| 45 |
LI X , MARTINEZ J F , RUBIO G . A new fuzzy ontology development methodology (FODM) proposal[J]. IEEE Access, 2016, 4, 7111- 7124.
doi: 10.1109/ACCESS.2016.2621756 |
| 46 |
LASKEY K B . MEBN: a language for first-order Bayesian knowledge bases[J]. Artificial Intelligence, 2008, 172 (2-3): 140- 178.
doi: 10.1016/j.artint.2007.09.006 |
| 47 | CARVALHO R N, MATSUMOTO S, LASKEY K B, et al. Probabilistic ontology and knowledge fusion for procurement fraud detection in Brazil[M]. Uncertainty Reasoning for the Semantic Web Ⅱ. Heidelberg: Springer-Verlag, 2010. |
| 48 | CARVALHO R N, HABERLIN R, COSTA P C G, et al. Modeling a probabilistic ontology for maritime domain awareness[C]//Proc. of the 14th International Conference on Information Fusion, 2011. |
| 49 | FABIEN L , NEIL D , CAELAN G , et al. Platform-indepen-dent benchmarks for task and motion planning[J]. IEEE Robo-tics & Automation Letters, 2018, 3 (4): 3765- 3772. |
| 50 | CAMBON S, GRAVOT F, ALAMI R. A robot task planner that merges symbolic and geometric reasoning[C]//Proc. of the European Conference on Artificial Intelligence, 2004. |
| 51 | DORNHEGE C, EYERICH P, KELLER T, et al. Semantic attachments for domain-independent planning systems[C]//Proc. of the 19th International Conference on Automated Planning and Scheduling, 2009, 19-23. |
| 52 | GARRETT C R, LOZANO-PÉREZ T, KAELBLING L P. STRIPStream: integrating symbolic planners and blackbox samplers[EB/OL]. [2021-01-15]. https://arxiv.org/abs/1802.08705. |
| 53 | DONG Y P, SU H, ZHU J, et al. Towards interpretable deep neural networks by leveraging adversarial examples[EB/OL]. [2021-01-15]. https://arxiv.org/abs/1708.05493. |
| 54 | DONG Y P, LIAO F Z, PANG T Y, et al. Boosting adversarial attacks with momentum[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2018. |
| 55 | 张钹, 朱军, 苏航. 迈向第三代人工智能[J]. 中国科学: 信息科学, 2020, 50 (9): 1281- 1302. |
| ZHANG B , ZHU J , SU H . Toward the third generation of artificial intelligence[J]. Scientia Sinica Informationis, 2020, 50 (9): 1281- 1302. | |
| 56 | 胡晓峰, 齐大伟. 智能决策问题探讨—-从游戏博弈到作战指挥, 距离还有多远[J]. 指挥与控制学报, 2020, 6 (4): 356- 363. |
| HU X F , QI D W . On problems of intelligent decision-making-how far is it from game-playing to operational command[J]. Journal of command and control, 2020, 6 (4): 356- 363. | |
| 57 | SAXENA A, JAIN A, SENER O, et al. RoboBrain: large-scale knowledge engine for robots[EB/OL]. [2021-01-15]. https://arxiv.org/abs/1412.0691. |
| 58 | TENORTH M, BEETZ M. KnowRob-knowledge processing for autonomous personal robots[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots & Systems, 2009, 4261-4266. |
| 59 | TENORTH M , BEETZ M . Representations for robot know-ledge in the KnowRob framework[J]. Artificial Intelligence, 2015, 247, 151- 169. |
| 60 | WAIBEL M , BEETZ M , CIVERA J , et al. RoboEarth-a world wide web for robots[J]. IEEE Robotics & Automation Magazine, 2011, 18 (2): 69- 82. |
| 61 | SALAM K A, MUNAWAR A. Knowledge engine for robots using ontology[C]//Proc. of the International Conference on Applied Computing and Information Technology, 2017: 25-28. |
| 62 |
AL-MOADHEN A , QIU R , PACKIANATHER M , et al. Integrating robot task planner with common-sense knowledge base to improve the efficiency of planning[J]. Procedia Computer Science, 2013, 22, 211- 220.
doi: 10.1016/j.procs.2013.09.097 |
| 63 | LEMAIGNAN S, ROS R, MOSENLECHNER L, et al. ORO, a knowledge management platform for cognitive architectures in robotics[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots & Systems, 2010. |
| 64 |
LEMAIGNAN S . Grounding the interaction: knowledge mana-gement for interactive robots[J]. KI - Künstliche Intelligenz, 2013, 27 (2): 183- 185.
doi: 10.1007/s13218-013-0246-3 |
| 65 |
DIAB M , AKBARI A , UD D M , et al. PMK-a knowledge processing framework for autonomous robotics perception and manipulation[J]. Sensors, 2019, 19 (5): 1166- 1188.
doi: 10.3390/s19051166 |
| 66 |
WIELEMAKER J , SCHRIJVERS T , TRISKA M , et al. SWI-Prolog[J]. Theory and Practice of Logic Programming, 2012, 12 (1-2): 67- 96.
doi: 10.1017/S1471068411000494 |
| 67 |
卜慧蛟, 张进, 罗亚中, 等. 基于本体理论的空间站短期任务规划领域建模研究[J]. 载人航天, 2016, 22 (2): 191- 201.
doi: 10.3969/j.issn.1674-5825.2016.02.009 |
|
BU H J , ZHANG J , LUO Y Z , et al. Modeling of space station short-term mission planning domain based on ontology theory[J]. Manned Spaceflight, 2016, 22 (2): 191- 201.
doi: 10.3969/j.issn.1674-5825.2016.02.009 |
|
| 68 |
GENG X L , LIANG H W , YU B , et al. A scenario-adaptive driving behavior prediction approach to urban autonomous dri-ving[J]. Applied Sciences, 2017, 7 (4): 426- 447.
doi: 10.3390/app7040426 |
| 69 | HUANG L, LIANG H W, YU B, et al. Ontology-based dri-ving scene modeling: situation assessment and decision making for autonomous vehicles[C]//Proc. of the 4th Asia-Pacific Conference on Intelligent Robot Systems, 2019. |
| 70 |
CHEN Z X , ZHAO B L , ZHAO S J , et al. Learning and planning based on merged experience from multiple situations for a service robot[J]. Applied Sciences, 2018, 8 (10): 1832- 1849.
doi: 10.3390/app8101832 |
| 71 |
CHEN Z X , SONG C , YANG Y Y , et al. Robot navigation based on human trajectory prediction and multiple travel modes[J]. Applied Sciences, 2018, 8 (11): 2205- 2225.
doi: 10.3390/app8112205 |
| 72 | 李泚泚, 田国会, 路飞, 等. 面向服务机器人的物品知识自主构建方法[J]. 东南大学学报(自然科学版), 2020, 50 (2): 395- 401. |
| LI C C , TIAN G H , LU F , et al. Automatic construction method for object knowledge on service robots[J]. Journal of Southeast University (Natural Science Edition), 2020, 50 (2): 395- 401. | |
| 73 | ZERVAKIS L, TRYFONOPOULOS C, PAPADAKIS-PESARESI A, et al. Full-text support for Publish/Subscribe ontology systems[C]//Proc. of the European Semantic Web Confe-rence, 2016. |
| 74 | BAUMGARTNER N , GOTTESHEIM W , MITSCH S , et al. BeAware! -Situation awareness, the ontology-driven way[J]. Data & Knowledge Engineering, 2010, 69 (11): 1181- 1193. |
| 75 | 司成. 基于本体的网络威胁态势推演与评估技术研究[D]. 郑州: 中国人民解放军信息工程大学, 2015. |
| SI C. Research on network threat situation deduction and evaluation technology based on ontology[D]. Zhengzhou: Information Engineering University of the PLA, 2015. | |
| 76 | 黄玉奇. 基于贝叶斯网络和本体的态势估计方法[D]. 杭州: 杭州电子科技大学, 2012. |
| HUANG Y Q. A method of situation assessment based on bayesian network and Ontology[D]. Hangzhou: Hangzhou Dianzi University, 2012. | |
| 77 | WANG S, ZHANG Y, LIAO Z Y. Building domain-specific knowledge graph for unmanned combat vehicle decision making under uncertainty[C]//Proc. of the Chinese Automation Congress, 2019: 4718-4721. |
| 78 |
LENAT D . CYC: a large-scale investment in knowledge infrastructure[J]. Communications of the ACM, 1995, 38 (11): 33- 38.
doi: 10.1145/219717.219745 |
| 79 | TATE A . Towards a plan ontology[J]. Journal of the Italian Association of AI, 1996, 9 (1): 19- 26. |
| 80 | PEASE R A, CARRICO M. JTF ATD core plan representation[C]//Proc. of the AAAI Spring Symposium on Ontological Engineering, 1997: 24-26. |
| 81 | TATE A. Representing plans as a set of constraints-the <I-N-OVA>model[C]//Proc. of the 3rd International Conference on Artificial Intelligence Planning Systems, 1996: 221-228. |
| 82 |
TATE A . Roots of SPAR-shared planning and activity representation[J]. The Knowledge Engineering Review, 1998, 13 (1): 121- 128.
doi: 10.1017/S0269888998001064 |
| 83 | VAKEBTE A, BLYTHE J, GIL Y, et al. On the role of humans in enterprise control systems: the experience of INSPECT[C]//Proc. of the JFACC Symposium on Advances in Enterprise Control, 1999. |
| 84 | 黎鑫. 基于本体的作战方案任务完整性评估方法[D]. 长沙: 国防科学技术大学, 2017. |
| LI X. A method of mission integrity assessment based on onto-logy[D]. Changsha: National University of Defense Technology, 2017. | |
| 85 | MYERS K L . CPEF-a continuous planning and execution framework[J]. AI Magazine, 1999, 20 (4): 63- 69. |
| 86 | 刘园园. 水下机器人规划修复方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2014. |
| LIU Y Y. Reasearch on planning repair for autonomous underwater vehicle[D]. Harbin: Harbin Engineering University, 2014. | |
| 87 |
邵天浩, 张宏军, 程恺, 等. 层次任务网络中的重新规划研究综述[J]. 系统工程与电子技术, 2020, 42 (12): 2833- 2846.
doi: 10.3969/j.issn.1001-506X.2020.12.21 |
|
SHAO T H , ZHANG H J , CHENG K , et al. Review of replanning in hierarchical task network[J]. System Engineering and Electronics, 2020, 42 (12): 2833- 2846.
doi: 10.3969/j.issn.1001-506X.2020.12.21 |
|
| 88 | 耿新力. 城区不确定环境下无人驾驶车辆行为决策方法研究[D]. 合肥: 中国科学技术大学, 2017. |
| GENG X L. Research on behavior decision-making approaches for autonomous vehicles in urban uncertainty environments[D]. Hefei: University of Science and Technology of China, 2017. | |
| 89 | 黄璐. 基于本体论的无人驾驶车辆场景评估与行为决策方法研究[D]. 合肥: 中国科学技术大学, 2019. |
| HUANG L. Research on ontology-based situation assessment and decision-making approach for autonomous vehicles[D]. Hefei: University of Science and Technology of China, 2019. | |
| 90 |
JIMÉNEZ S , DE L R T , FERNÁNDEZ S , et al. A review of machine learning for automated planning[J]. The Knowledge Engineering Review, 2012, 27 (4): 433- 467.
doi: 10.1017/S026988891200001X |
| 91 | ARORA A , FIORINO H , PELLIER D , et al. A review of learning planning action models[J]. The Knowledge Enginee-ring Review, 2018, 33. |
| 92 | BONET B, GEFFNER H. Learning first-order symbolic representations for planning from the structure of the state space[EB/OL]. [2021-01-15]. https://arxiv.org/abs/1909.05546. |
| 93 | BATEMAN J, BEETZ M, BESSLER D, et al. Heterogeneous ontologies and hybrid reasoning for service robotics: the EASE framework[C]//Proc. of the 3rd Iberian Robotics Conference, 2017: 417-428. |
| 94 | BESER D, CECIL J, FREEDMAN M, et al. A grounded approach to modeling generic knowledge acquisition[EB/OL]. [2021-01-15]. https://arxiv.org/abs/2105.03207. |
| 95 | 陈志贤. 面向复杂环境的服务机器人自主规划方法研究[D]. 深圳: 中国科学院大学(中国科学院深圳先进技术研究院), 2019. |
| CHEN Z X. Study on approaches of automated planning of service robot for complex environment[D]. Shenzhen: University of Chinese Academy of Sciences (Shenzhen Institutes of Advanced Technology), 2019. | |
| 96 | 李泚泚. 基于本体知识引导的家庭服务机器人抓取策略研究[D]. 济南: 山东大学, 2020. |
| LI C C. Research on object grasp strategies for home service robot guided by ontology knowledge[D]. Ji'nan: Shandong University, 2020. |
| [1] | 余婧, 雍恩米, 陈汉洋, 郝东, 张显才. 面向多无人机协同对地攻击的双层任务规划方法[J]. 系统工程与电子技术, 2022, 44(9): 2849-2857. |
| [2] | 罗弋洋, 赵青松, 李华超, 李勇, 孙建彬. 武器装备运用知识框架及建模方法[J]. 系统工程与电子技术, 2022, 44(3): 841-849. |
| [3] | 王姝婷, 刘晓冰, 周军华, 白朝阳, 翟翔. 基于本体的复杂产品维修工程案例知识表示及重用方法[J]. 系统工程与电子技术, 2022, 44(2): 557-568. |
| [4] | 董晨, 帅逸仙, 周金鹏, 赖鹏, 程仙垒. 网络化多传感器-多武器协同防空任务规划[J]. 系统工程与电子技术, 2022, 44(12): 3738-3746. |
| [5] | 靳鹏, 李康. 基于改进合同网协议的分布式卫星资源调度[J]. 系统工程与电子技术, 2022, 44(10): 3164-3173. |
| [6] | 张晟宇, 孙煜坤, 朱振才, 胡海鹰. 启发式前后向链条优化组合在轨多目标观测规划算法[J]. 系统工程与电子技术, 2021, 43(5): 1262-1269. |
| [7] | 胡春宇, 刘卫东, 于天翔, 周立尧, 冯晨. 基于无人机实时数据多波次任务规划模型分析[J]. 系统工程与电子技术, 2021, 43(3): 747-754. |
| [8] | 孙雪, 黄志球, 沈国华, 王金永, 徐恒. 基于本体和BN的无人车行为决策方法[J]. 系统工程与电子技术, 2021, 43(2): 452-465. |
| [9] | 谷旭平, 唐大全. 基于细菌觅食算法的多异构无人机任务规划[J]. 系统工程与电子技术, 2021, 43(11): 3312-3320. |
| [10] | 程恺, 陈刚, 余晓晗, 刘满, 邵天浩. 知识牵引与数据驱动的兵棋AI设计及关键技术[J]. 系统工程与电子技术, 2021, 43(10): 2911-2917. |
| [11] | 贾高伟, 王建峰. 无人机集群任务规划方法研究综述[J]. 系统工程与电子技术, 2021, 43(1): 99-111. |
| [12] | 王桂胜, 黄国策, 王叶群, 董淑福, 任清华, 魏帅. 基于认知驱动的变换域通信智能抗干扰方法[J]. 系统工程与电子技术, 2021, 43(1): 223-231. |
| [13] | 邵天浩, 张宏军, 程恺, 戴成友, 余晓晗, 张可. 层次任务网络中的重新规划研究综述[J]. 系统工程与电子技术, 2020, 42(12): 2833-2846. |
| [14] | 靳鹏, 王超超, 夏维, 杨斌, 汤航. 考虑卫星指令上注的两阶段应急任务规划[J]. 系统工程与电子技术, 2019, 41(4): 810-818. |
| [15] | 张超, 靳鹏, 陈金勇, 李艳斌, 马万权. 面向应急观测的虚拟星座任务规划技术[J]. 系统工程与电子技术, 2019, 41(4): 819-825. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||