
系统工程与电子技术 ›› 2021, Vol. 43 ›› Issue (12): 3594-3602.doi: 10.12305/j.issn.1001-506X.2021.12.22
李翰, 张洪海*, 张连东, 刘皞
收稿日期:2021-02-04
出版日期:2021-11-24
发布日期:2021-11-30
通讯作者:
张洪海
作者简介:李翰 (1994—), 男, 硕士研究生, 主要研究方向为通航运行与无人机管控|张洪海 (1979—), 男, 教授, 博士研究生导师, 博士, 主要研究方向为空中交通管理、城市空中交通|张连东 (1997—), 男, 硕士研究生, 主要研究方向为通航运行与无人机管控|刘皞 (1979—), 男, 副教授, 硕士研究生导师, 博士, 主要研究方向为数学计算
基金资助:Han LI, Honghai ZHANG*, Liandong ZHANG, Hao LIU
Received:2021-02-04
Online:2021-11-24
Published:2021-11-30
Contact:
Honghai ZHANG
摘要:
针对城市区域多无人机协同物流任务分配问题, 综合考虑不同无人机性能、物流时效性、飞行可靠性等影响因素, 以经济成本、时间损失和安全风险最小为目标函数, 构建多无人机协同物流任务分配模型。因问题规模大、求解复杂度高, 设计改进的量子粒子群算法进行求解。首先,为增强粒子遍历性和多样性, 采用均匀化级联Logistic映射进行粒子初始化; 其次,为避免算法陷入局部最优解, 引入基于高斯分布的粒子变异方式; 最后,为提高算法运行效率, 运用自适应惯性权重方法对粒子赋值。仿真实验结果表明,所构建的模型能够实现任务分配多目标优化, 贴近城市区域无人机物流配送实际; 所提算法与传统量子粒子群算法和遗传算法相比, 任务分配代价分别下降了5.9%和6.3%;并进一步对参数权重设置进行分析, 当3个子目标函数权重系数分别为0.225、0.275和0.500, 种群规模为150时, 算法规划的结果最优。
中图分类号:
李翰, 张洪海, 张连东, 刘皞. 城市区域多物流无人机协同任务分配[J]. 系统工程与电子技术, 2021, 43(12): 3594-3602.
Han LI, Honghai ZHANG, Liandong ZHANG, Hao LIU. Multiple logistics unmanned aerial vehicle collaborative task allocation in urban areas[J]. Systems Engineering and Electronics, 2021, 43(12): 3594-3602.

图1
城市区域多目标多物流无人机配送示意图"
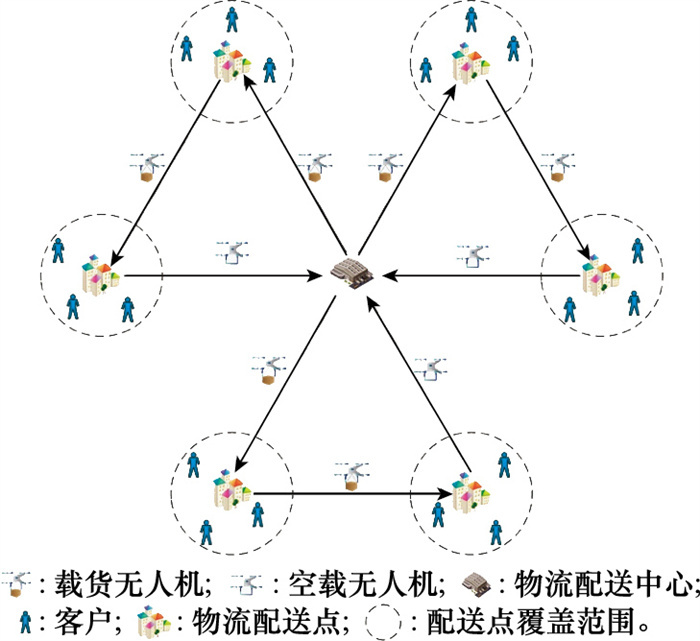

图2
物流无人机配送系统串并联线路示意图"
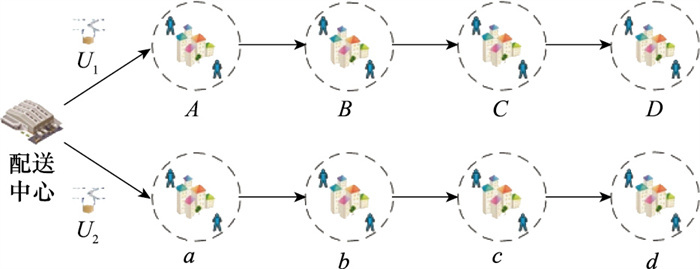
图3
高斯变异粒子作用范围与迭代次数关系"
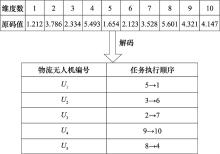
图4
任务分配方案与粒子间的映射关系示意图"
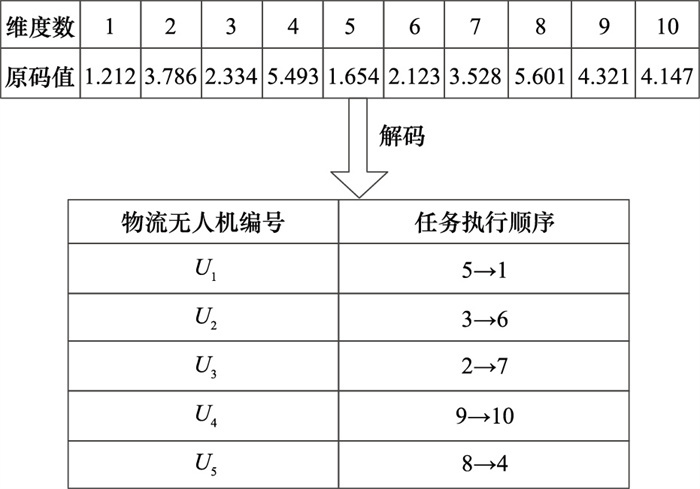
表1
无人机参数"
| 无人机编号 | cfi/(元/分钟) | ηi/(元/千米) | vi/(m·s-1) | Li(max)/m | qi(max)/ kg |
| U1 | 0.30 | 0.25 | 10 | 6 000 | 4.5 |
| U2 | 0.30 | 0.30 | 12 | 4 500 | 5.0 |
| U3 | 0.30 | 0.20 | 12 | 4 000 | 3.5 |
| U4 | 0.30 | 0.22 | 15 | 4 200 | 5.0 |
| U5 | 0.30 | 0.26 | 14 | 4 500 | 4.0 |
| U6 | 0.30 | 0.24 | 13 | 4 700 | 6.0 |
| U7 | 0.30 | 0.20 | 11 | 5 000 | 4.5 |
| U8 | 0.30 | 0.27 | 15 | 4 300 | 5.5 |
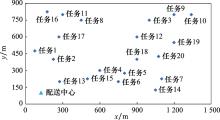
图5
物流配送任务点布局"
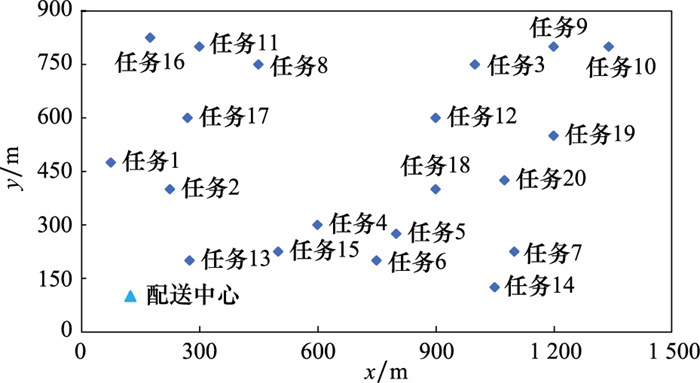
表2
物流配送任务点参数"
| 任务编号 | 时间窗/s | 坐标点/m | 卸货时间/s | 需货量/kg |
| T1 | [0, 100] | [75,475,50] | 30 | 0.5 |
| T2 | [0, 180] | [225,400,50] | 60 | 1.0 |
| T3 | [0, 200] | [1 000, 750, 60] | 60 | 1.0 |
| T4 | [0, 190] | [600,300,25] | 96 | 1.6 |
| T5 | [0, 300] | [800,275,25] | 60 | 1.0 |
| T6 | [0, 350] | [750,200,50] | 90 | 1.5 |
| T7 | [0, 220] | [1 100, 225, 50] | 72 | 1.2 |
| T8 | [0, 450] | [450, 750, 60] | 108 | 1.8 |
| T9 | [0, 400] | [1 200, 800, 25] | 36 | 0.6 |
| T10 | [0, 500] | [1 340, 800, 50] | 90 | 1.5 |
| T11 | [0, 370] | [300, 800, 50] | 108 | 1.8 |
| T12 | [0, 550] | [900, 600, 50] | 96 | 1.6 |
| T13 | [0, 420] | [275, 200, 30] | 84 | 1.4 |
| T14 | [0, 520] | [1 050, 125, 20] | 72 | 1.2 |
| T15 | [0, 600] | [500, 225, 40] | 90 | 1.5 |
| T16 | [0, 530] | [175,825,60] | 102 | 1.7 |
| T17 | [0.560] | [270,600,60] | 54 | 0.9 |
| T18 | [0, 230] | [900,400,10] | 48 | 0.8 |
| T19 | [0, 460] | [1 200, 550, 40] | 72 | 1.2 |
| T20 | [0, 570] | [1 075, 425, 30] | 66 | 1.1 |
表3
其他参数"
| 参数 | 数值 | 参数 | 数值 | |
| 时间损失系数λ | 10 | 经济成本α1 | 0.3 | |
| 延迟惩罚α2 | 0.3 | 安全风险α3 | 0.4 | |
| 配送中心坐标 | [125, 100, 25] | 出发时间t0 | 0 | |
| 种群规模Q | 50 | 迭代次数tmax | 200 | |
| 惯性权重上界βmax | 1.0 | 惯性权重下界βmin | 0.5 | |
| Logistic参数μ | 4 | 高斯分布预设参数ε | 1.0 |
表4
3种算法实验结果比较"
| 算法名称 | 目标函数值 | 经济成本 | 延迟惩罚 | 安全风险 |
| QPSO | 0.145 5 | 0.222 5 | 0.104 0 | 0.118 9 |
| IQPSO | 0.136 9 | 0.220 9 | 0.082 5 | 0.114 8 |
| 遗传算法 | 0.146 1 | 0.199 6 | 0.020 1 | 0.200 4 |
表5
最佳任务分配方案"
| 编号 | 配送顺序 | 航程/m | 飞行时长/s | 载货量/kg |
| U1 | 0-T3-T19-T18-T17-0 | 2 896 | 524 | 3.9 |
| U2 | 0-T13-T15-T4-0 | 1 048 | 357 | 4.5 |
| U3 | 0-T2-T1-T16-0 | 1 577 | 323 | 3.2 |
| U4 | 0-T12-T10-T9-T14-0 | 3 165 | 505 | 4.9 |
| U5 | 0-T5-T6-0 | 1 424 | 252 | 2.5 |
| U6 | 0-T11-T8-0 | 1 608 | 340 | 3.6 |
| U8 | 0-T7-T20-0 | 2 190 | 284 | 2.3 |
图6
物流无人机飞行时序"
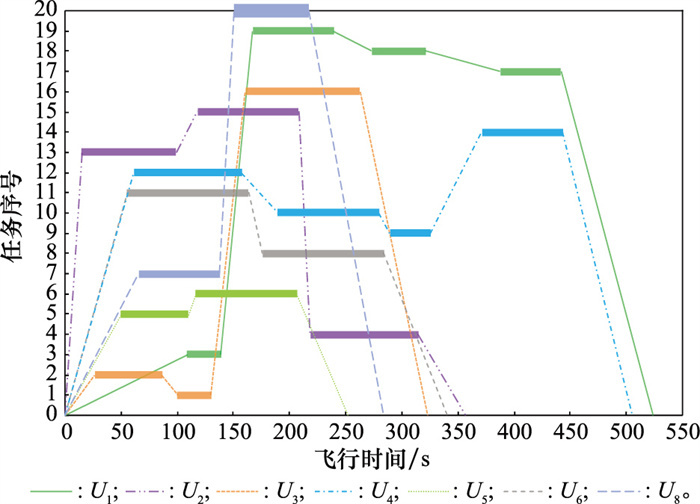
表6
不同目标函数权重对任务分配结果的影响"
| 序号 | α1权重 | α2权重 | α3权重 | 经济成本 | 延迟惩罚 | 安全风险 | 算法时长/s |
| 1 | 0.000 | 0.500 | 0.500 | 0.276 1 | 0.053 5 | 0.122 9 | 12.81 |
| 2 | 0.025 | 0.475 | 0.500 | 0.285 1 | 0.054 1 | 0.124 4 | 13.67 |
| 3 | 0.050 | 0.450 | 0.500 | 0.281 3 | 0.051 2 | 0.122 3 | 13.86 |
| 4 | 0.075 | 0.425 | 0.500 | 0.260 5 | 0.063 0 | 0.113 8 | 13.83 |
| 5 | 0.100 | 0.400 | 0.500 | 0.267 3 | 0.057 0 | 0.117 3 | 13.78 |
| 6 | 0.125 | 0.375 | 0.500 | 0.260 1 | 0.069 8 | 0.111 6 | 13.62 |
| 7 | 0.150 | 0.350 | 0.500 | 0.242 0 | 0.098 1 | 0.114 7 | 13.22 |
| 8 | 0.175 | 0.325 | 0.500 | 0.252 2 | 0.076 7 | 0.103 1 | 13.90 |
| 9 | 0.200 | 0.300 | 0.500 | 0.239 8 | 0.093 1 | 0.110 5 | 13.76 |
| 10 | 0.225 | 0.275 | 0.500 | 0.232 7 | 0.087 4 | 0.106 2 | 13.79 |
| 11 | 0.250 | 0.250 | 0.500 | 0.250 2 | 0.103 4 | 0.110 5 | 13.89 |
| 12 | 0.275 | 0.225 | 0.500 | 0.234 1 | 0.114 5 | 0.110 9 | 13.72 |
| 13 | 0.300 | 0.200 | 0.500 | 0.222 4 | 0.124 6 | 0.102 8 | 14.00 |
| 14 | 0.325 | 0.175 | 0.500 | 0.221 3 | 0.114 3 | 0.101 4 | 13.87 |
| 15 | 0.350 | 0.150 | 0.500 | 0.220 0 | 0.149 2 | 0.089 7 | 13.64 |
| 16 | 0.375 | 0.125 | 0.500 | 0.213 2 | 0.150 8 | 0.099 7 | 13.85 |
| 17 | 0.400 | 0.100 | 0.500 | 0.203 9 | 0.159 7 | 0.096 1 | 13.95 |
| 18 | 0.425 | 0.075 | 0.500 | 0.201 6 | 0.170 3 | 0.089 0 | 13.81 |
| 19 | 0.450 | 0.050 | 0.500 | 0.204 3 | 0.180 9 | 0.103 9 | 13.65 |
| 20 | 0.475 | 0.025 | 0.500 | 0.201 5 | 0.224 4 | 0.102 0 | 13.98 |
| 21 | 0.500 | 0.000 | 0.500 | 0.195 3 | 0.156 8 | 0.087 4 | 13.53 |
图7
目标函数权重值的影响"
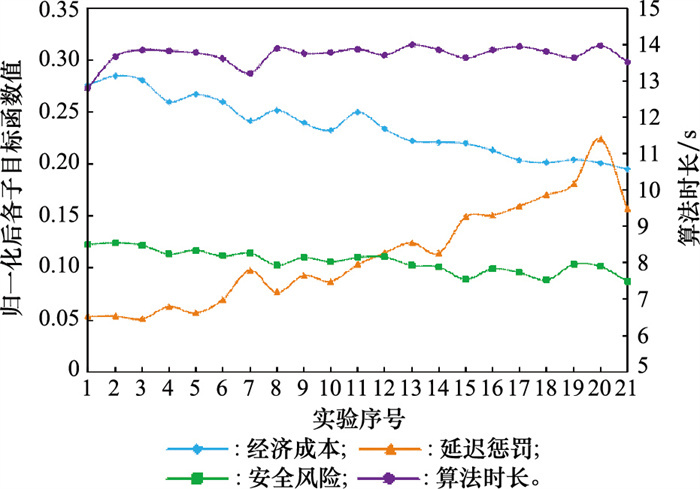
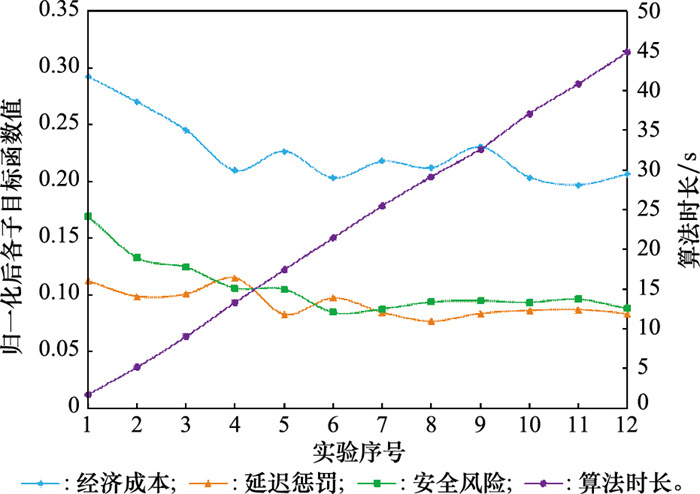
表7
不同种群规模对任务分配结果的影响"
| 实验序号 | 种群规模Q | 经济成本 | 延迟惩罚 | 安全风险 | 算法时长/s |
| 1 | 25 | 0.292 7 | 0.112 1 | 0.168 9 | 1.74 |
| 2 | 50 | 0.270 1 | 0.098 4 | 0.132 6 | 5.18 |
| 3 | 75 | 0.245 2 | 0.100 3 | 0.124 2 | 9.01 |
| 4 | 100 | 0.209 5 | 0.114 7 | 0.105 9 | 13.34 |
| 5 | 125 | 0.226 5 | 0.082 6 | 0.105 1 | 17.43 |
| 6 | 150 | 0.202 8 | 0.097 0 | 0.084 6 | 21.45 |
| 7 | 175 | 0.217 6 | 0.084 2 | 0.087 7 | 25.47 |
| 8 | 200 | 0.211 9 | 0.076 5 | 0.093 8 | 29.13 |
| 9 | 225 | 0.230 4 | 0.083 3 | 0.094 9 | 32.59 |
| 10 | 250 | 0.203 5 | 0.086 1 | 0.093 5 | 37.08 |
| 11 | 275 | 0.196 7 | 0.086 9 | 0.096 2 | 40.81 |
| 12 | 300 | 0.206 2 | 0.083 2 | 0.087 9 | 44.79 |
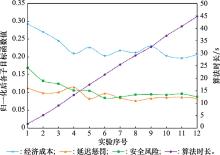
图8
算法种群规模权重值的影响"
| 1 |
SHE R F , OUYANG Y F . Efficiency of UAV-based last-mile delivery under congestion in low-altitude air[J]. Transportation Research Part C: Emerging Technologies, 2021, 122, 102878.
doi: 10.1016/j.trc.2020.102878 |
| 2 |
KURU K , ANSELL D , KHAN W , et al. Analysis and optimization of unmanned aerial vehicle swarms in logistics: an intelligent delivery platform[J]. IEEE Access, 2019, 7, 15804- 15831.
doi: 10.1109/ACCESS.2019.2892716 |
| 3 | KIM M H , BAIK H , LEE S . Response threshold model based UAV search planning and task allocation[J]. Journal of Intelligent & Robotic Systems, 2014, 75 (3, 4): 625- 640. |
| 4 |
ZHANG L , ZHU Y A , SHI X C . A hierarchical decision-making method with a fuzzy ant colony algorithm for mission planning of multiple UAVS[J]. Information, 2020, 11 (4): 226.
doi: 10.3390/info11040226 |
| 5 | HUANG T Y, WANG Y, CAO X W, et al. Multi-UAV mission planning method[C]//Proc. of the 3rd International Conference on Unmanned Systems, 2020: 325-330. |
| 6 |
LIU X F , PENG Z R , CHANG Y T , et al. Multi-objective evolutionary approach for UAV cruise route planning to collect traffic information[J]. Journal of Central South University, 2012, 19 (12): 3614- 3621.
doi: 10.1007/s11771-012-1449-8 |
| 7 |
赵雪森, 王社伟, 邵校. 基于改进量子粒子群优化算法的多UCAV协同任务分配研究[J]. 兵器装备工程学报, 2015, 36 (10): 120- 124.
doi: 10.11809/scbgxb2015.10.030 |
|
ZHAO X S , WANG S W , SHAO X . Cooperative task allocation for multiple UCAV based on improved quantum-behaved particle swarm optimization algorithm[J]. Journal of Ordnance Equipment Engineering, 2015, 36 (10): 120- 124.
doi: 10.11809/scbgxb2015.10.030 |
|
| 8 | ZHANG Y Z, HU B, LI J W, et al. Heterogeneous multi-UAVs cooperative task assignment based on GSA-GA[C]//Proc. of the IEEE/CSAA International Conference on Aircraft Utility Systems, 2016: 423-426. |
| 9 |
FU Z J , MAO Y H , HE D J , et al. Secure multi-UAV collaborative task allocation[J]. IEEE Access, 2019, 7, 35579- 35587.
doi: 10.1109/ACCESS.2019.2902221 |
| 10 | 蒋硕, 袁小平. 改进PSO算法在多无人机协同任务分配中的应用[J]. 计算机应用研究, 2019, 36 (11): 3344- 3347, 3360. |
| JIANG S , YUAN X P . Application of improved PSO algorithm in multi UAV cooperative task allocation[J]. Application Research of Computers, 2019, 36 (11): 3344- 3347, 3360. | |
| 11 | 林君灿, 贾高伟, 侯中喜. 异构UAV编队反雷达作战中任务分配方法[J]. 系统工程与电子技术, 2018, 40 (9): 1986- 1992. |
| LIN J C , JIA G W , HOU Z X . Research on task assignment of heterogeneous UAV formation in the anti-radar combat[J]. Systems Engineering and Electronics, 2018, 40 (9): 1986- 1992. | |
| 12 | ZHU S R, ZHANG Y Z, GAO Y, et al. A cooperative task assignment method of multi-UAV based on self organizing map[C]// Proc. of the International Conference on Cyber-Enabled Distri-buted Computing and Knowledge Discovery, 2018: 437-442. |
| 13 |
YAO W R , QI N M , WAN N , et al. An iterative strategy for task assignment and path planning of distributed multiple unmanned aerial vehicles[J]. Aerospace Science and Technology, 2019, 86, 455- 464.
doi: 10.1016/j.ast.2019.01.061 |
| 14 | SONG B D , PARK K , KIM J . Persistent UAV delivery logistics: MILP formulation and efficient heuristic[J]. Computers & Industrial Engineering, 2018, 120, 418- 428. |
| 15 | JIANG X W, ZHOU Q, YE Y. Method of task assignment for UAV based on particle swarm optimization in logistics[C]//Proc. of the International Conference on Intelligent Systems, Metaheuristics & Swarm Intelligence, 2017: 113-117. |
| 16 |
SHIRANI B , NAJAFI M , IZADI I . Cooperative load transportation using multiple UAVs[J]. Aerospace Science and Technology, 2019, 84, 158- 169.
doi: 10.1016/j.ast.2018.10.027 |
| 17 | FU X W, PAN J, GAO X G, et al. Task allocation method for multi-UAV teams with limited communication bandwidth[C]//Proc. of the 15th International Conference on Control, Automation, Robotics and Vision, 2018: 1874-1878. |
| 18 | SAMIEI A, ISMAIL S, SUN L. Cluster-based hungarian approach to task allocation for unmanned aerial vehicles[C]//Proc. of the IEEE National Aerospace and Electronics Conference, 2019: 148-154. |
| 19 | 林君灿, 贾高伟, 侯中喜. 异构UAV编队反雷达作战中任务分配方法[J]. 系统工程与电子技术, 2018, 40 (9): 1986- 1992. |
| LIN J C , JIA G W , HOU Z X . Research on task assignment of heterogeneous UAV formation in the anti-radar combat[J]. Systems Engineering and Electronics, 2018, 40 (9): 1986- 1992. | |
| 20 | YE F , CHEN J , TIAN Y , et al. Cooperative multiple task assignment of heterogeneous UAVs using a modified genetic algorithm with multi-type-gene chromosome encoding strategy[J]. Journal of Intelligent & Robotic Systems, 2020, 100 (2): 615- 627. |
| 21 | NI J J , TANG M , CHEN Y N , et al. An improved cooperative control method for hybrid unmanned aerial-ground system in multitasks[J]. International Journal of Aerospace Engineering, 2020, 2020, 9429108. |
| 22 | AMJAAD A , HEBA K , KAMAL Y . Fish-inspired task allocation algorithm for multiple unmanned aerial vehicles in search and rescue missions[J]. Remote Sensing, 2020, 13 (27): 27. |
| 23 | CHEN C , BAO W D , MEN T , et al. NECTAR—an agent-based dynamic task allocation algorithm in the UAV swarm[J]. Complexity, 2020, 6747985. |
| 24 | LIU W H , ZHENG X . Three-dimensional multi-mission planning of UAV using improved ant colony optimization algorithm based on the finite-time constraints[J]. International Journal of Computational Intelligence Systems, 2021, 14 (1): 79- 87. |
| 25 |
CHEN X , LIU Y T , YIN L Y , et al. Cooperative task assignment and track planning for multi-UAV attack mobile targets[J]. Journal of Intelligent & Robotic Systems, 2020, 100 (3): 1383- 1400.
doi: 10.1007/s10846-020-01241-w |
| 26 | SUN J, FENG B, XU W B. Particle swarm optimization with particles having quantum behavior[C]//Proc. of the Congress on Evolutionary Computation, 2004. |
| 27 |
MASDARI M , SALEHI F , JALALI M , et al. A survey of PSO-based scheduling algorithms in cloud computing[J]. Journal of Network & Systems Managenment, 2017, 25 (1): 122- 158.
doi: 10.1007/s10922-016-9385-9 |
| 28 |
XU C F , DUAN H B , LIU F . Chaotic artificial bee colony approach to uninhabited combat air vehicle (UCAV) path plan- ning[J]. Aerospace Science and Technology, 2010, 14 (8): 535- 541.
doi: 10.1016/j.ast.2010.04.008 |
| 29 |
ZHANG Z X , YANG R N , LI H Y , et al. Antlion optimizer algorithm based on chaos search and its application[J]. Journal of Systems Engineering and Electronics, 2019, 30 (2): 352- 365.
doi: 10.21629/JSEE.2019.02.14 |
| 30 | 张庆. 基于改进型混沌映射的粒子群算法及其在天线参数优化中的应用[D]. 昆明: 云南大学, 2018. |
| ZHANG Q. Based on improved chaos mapping particle swarm optimization algorithm and its application on optimization of antenna parameter[D]. Kunming: Yunnan University, 2018. | |
| 31 | 李继松. 自适应参数调整量子粒子群算法研究及应用[D]. 长沙: 中南大学, 2014. |
| LI J S. Research and application on adaptive parameter adjusting quantum-behaved particle swarm optimization[D]. Changsha: Central South University, 2014. |
| [1] | 刘甲磊, 马佳智, 施龙飞. 虚拟波束四阶累积量DOA估计方法[J]. 系统工程与电子技术, 2022, 44(7): 2134-2142. |
| [2] | 汤安迪, 韩统, 徐登武, 周欢, 谢磊. 使用高斯分布估计策略的改进樽海鞘群算法[J]. 系统工程与电子技术, 2022, 44(7): 2229-2240. |
| [3] | 岳程斐, 薛正华, 姚蔚然, 曹喜滨. 基于机群关系特征的多机协同作战任务分配[J]. 系统工程与电子技术, 2022, 44(6): 1897-1906. |
| [4] | 尹洋, 杨全顺, 王征, 刘洋. 通信距离约束下的无人船集群覆盖搜索方法[J]. 系统工程与电子技术, 2022, 44(12): 3821-3828. |
| [5] | 李锐洋, 霍伟博, 马巍, 程子扬. 基于逆高斯纹理分布的协方差矩阵估计方法[J]. 系统工程与电子技术, 2021, 43(9): 2470-2475. |
| [6] | 沈笑云, 廖仙华, 孙卫天, 夏亚波, 杨磊. 可变先验贝叶斯学习稀疏SAR成像[J]. 系统工程与电子技术, 2021, 43(7): 1781-1790. |
| [7] | 周晶, 赵晓哲, 许震, 林众, 张晓盼. 基于D-NSGA-Ⅲ算法的无人机群高维多目标任务分配方法[J]. 系统工程与电子技术, 2021, 43(5): 1240-1247. |
| [8] | 王坚浩, 张亮, 史超, 车飞, 张鹏涛. 装备保障任务分配建模与DLS-BCIWBA算法求解[J]. 系统工程与电子技术, 2018, 40(9): 1979-1985. |
| [9] | 林君灿, 贾高伟, 侯中喜. 异构UAV编队反雷达作战中任务分配方法[J]. 系统工程与电子技术, 2018, 40(9): 1986-1992. |
| [10] | 崔亚妮, 任佳, 杜文才. 战场环境下多无人机时敏任务动态分配算法[J]. 系统工程与电子技术, 2016, 38(4): 828-835. |
| [11] | 孙小雷1, 齐乃明1, 董程2, 姚蔚然1. 无人机任务分配与航迹规划协同控制方法[J]. 系统工程与电子技术, 2015, 37(12): 2772-2776. |
| [12] | 姚佩阳1, 万路军1,2, 孙鹏1, 周翔翔3. 基于RHP-IVFSA的多智能体编组#br# 任务分配动态优化[J]. 系统工程与电子技术, 2014, 36(7): 1309-1319. |
| [13] | 孙天宇, 师义民, 卫炜. 逐步增加I型混合截尾试验下B-S部件的可靠性分析[J]. 系统工程与电子技术, 2014, 36(11): 2326-2331. |
| [14] | 江建清, 朱晓敏, 伍国华, 贺川, 吴朝波. 面向应急对地观测任务的多飞艇协同分配方法[J]. Journal of Systems Engineering and Electronics, 2013, 35(2): 317-325. |
| [15] | 万路军, 姚佩阳, 孙鹏. 有人/无人作战智能体分布式任务分配方法[J]. Journal of Systems Engineering and Electronics, 2013, 35(2): 310-316. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||