
系统工程与电子技术 ›› 2021, Vol. 43 ›› Issue (11): 3321-3329.doi: 10.12305/j.issn.1001-506X.2021.11.33
李万礼1,2,*, 李炯1, 雷虎民1, 骆长鑫2, 李世杰2
收稿日期:2020-10-21
出版日期:2021-11-01
发布日期:2021-11-12
通讯作者:
李万礼
作者简介:李万礼(1997—), 男, 硕士研究生, 主要研究方向为空天拦截器制导控制与仿真|李炯(1979—), 男, 副教授, 博士, 主要研究方向为飞行器制导与控制技术|雷虎民(1960—), 男, 教授, 博士, 主要研究方向为飞行器制导与控制技术|骆长鑫(1994—), 男, 博士研究生, 主要研究方向为空天拦截器制导控制与仿真|李世杰(1996—), 男, 硕士研究生, 主要研究方向为空天拦截器制导控制与仿真
基金资助:Wanli LI1,2,*, Jiong LI1, Humin LEI1, Changxin LUO2, Shijie LI2
Received:2020-10-21
Online:2021-11-01
Published:2021-11-12
Contact:
Wanli LI
摘要:
针对拦截弹的中末制导交接班条件设置问题, 分析了以滑模变结构制导律为末制导律的捕获区。首先, 结合临近空间作战背景建立末制导段弹目相对运动模型。其次, 基于滑模变结构控制理论设计了一种能够保证拦截末端过载收敛且性能优良的滑模变结构制导律作为末制导律, 并对其稳定性进行分析。然后, 分析了零控拦截条件并对滑模变结构制导律的捕获区进行理论推导、分析与证明, 得到了滑模变结构制导律的捕获区边界。最后, 通过设计4种情形下的仿真实验, 验证了本文捕获区分析的正确性。
中图分类号:
李万礼, 李炯, 雷虎民, 骆长鑫, 李世杰. 基于滑模变结构制导律的捕获区分析[J]. 系统工程与电子技术, 2021, 43(11): 3321-3329.
Wanli LI, Jiong LI, Humin LEI, Changxin LUO, Shijie LI. Analysis of capture region based on sliding mode variable structure guidance law[J]. Systems Engineering and Electronics, 2021, 43(11): 3321-3329.

图1
弹目相对运动关系"

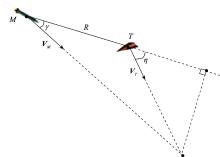
图2
碰撞三角形(情形1)"


图3
碰撞三角形(情形2)"


图4
捕获区分析示意图"

表1
弹目初始条件"
| 项目 | 参数 | ||
| X/km | Y/km | V/(m·s-1) | |
| 拦截弹 | 200 | 38.7 | 1 600 |
| 目标 | 300 | 30 | 3 200 |

图5
捕获区范围"


图6
弹目轨迹(情形1)"

图7
拦截弹过载变化(情形1)"
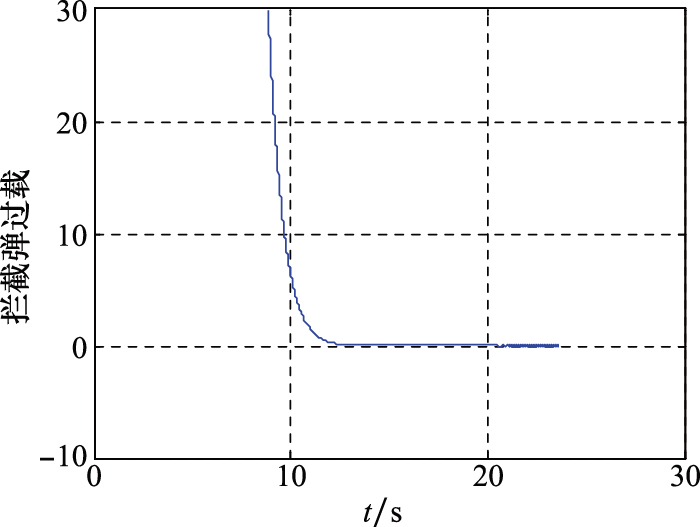

图8
视线角变化(情形1)"
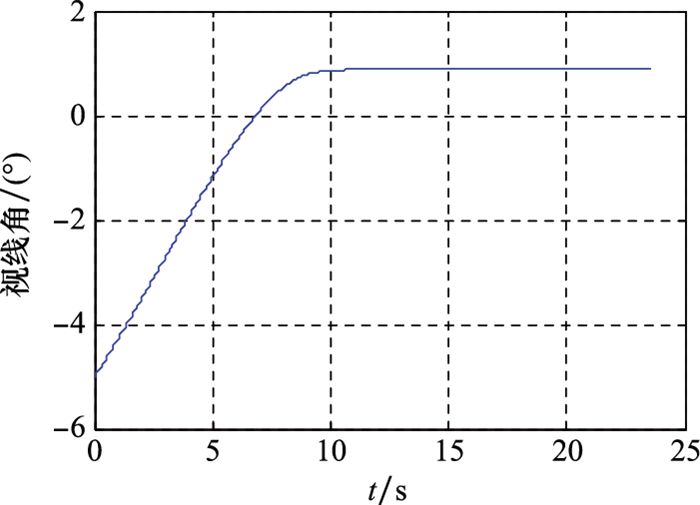

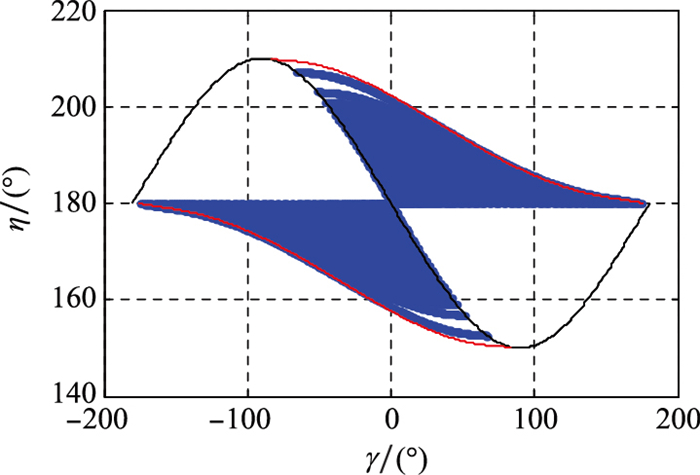
图9
捕获区曲线(情形1)"


图10
弹目轨迹(情形2)"


图11
拦截弹过载变化(情形2)"


图12
视线角变化(情形2)"


图13
捕获区曲线(情形2)"


图14
弹目轨迹(情形3)"


图15
拦截弹与目标过载变化(情形3)"


图16
视线角变化(情形3)"


图17
捕获区曲线(情形3)"


图18
弹目轨迹(情形4)"


图19
拦截弹过载变化(情形4)"
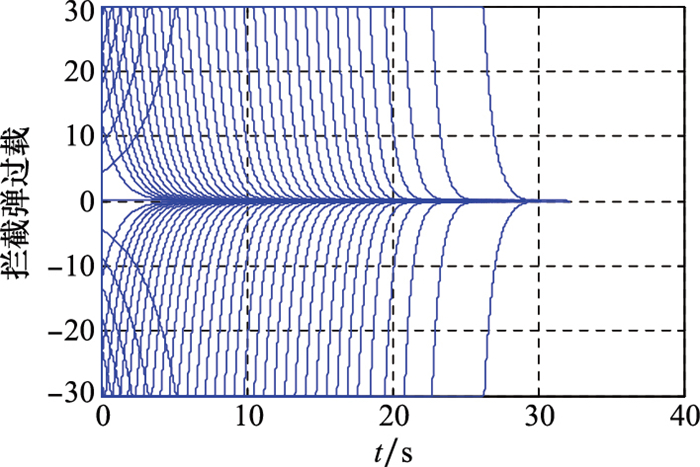

图20
捕获区曲线(情形4)"
| 1 | 余协正, 陈宁, 陈萍萍, 等. 临近空间高超声速飞行器目标特性及突防威胁分析[J]. 航天电子对抗, 2019, 35 (6): 24- 29. |
| YU X Z , CHEN N , CHEN P P , et al. Target characteristics and penetration threats analysis of hypersonic vehicle in the near-space[J]. Aerospace Electronic Warfare, 2019, 35 (6): 24- 29. | |
| 2 |
ZHOU J , LEI H M , ZHANG D Y . Online optimal midcourse trajectory modification algorithm for hypersonic vehicle interceptions[J]. Aerospace Science and Technology, 2017, 63, 266- 277.
doi: 10.1016/j.ast.2016.12.022 |
| 3 |
LEI H M , ZHOU J , ZHAI D L , et al. Optimal midcourse tra-jectory cluster generation and trajectory modification for hypersonic interceptions[J]. Journal of Systems Engineering and Electronics, 2017, 28 (6): 1162- 1173.
doi: 10.21629/JSEE.2017.06.14 |
| 4 | 王华吉, 雷虎民, 张大元, 等. 反临近空间高超声速目标拦截弹中末制导交接班窗口[J]. 国防科技大学学报, 2018, 40 (5): 4- 11. |
| WANG H J , LEI H M , ZHANG D Y , et al. Midcourse and terminal guidance handover window for interceptor against near space hypersonic target[J]. Journal of National University of Defense Technology, 2018, 40 (5): 4- 11. | |
| 5 | LI K B , SHIN H S , TSOURDOS A , et al. Capturability of 3D PPN against lower-speed maneuvering target for homing phase[J]. IEEE Trans. on Aerospace and Electronic Systems, 2019, 56 (1): 711- 722. |
| 6 |
HE S M , LIN D F , WANG J . Compound control methodology for a robust missile autopilot design[J]. Journal of Aerospace Engineering, 2015, 28 (6): 04014145.
doi: 10.1061/(ASCE)AS.1943-5525.0000484 |
| 7 |
LIN Y P , LINC L , LI Y H . Development of 3-D modified proportional navigation guidance law against high-speed targets[J]. IEEE Trans. on Aerospace and Electronic Systems, 2013, 49 (1): 677- 687.
doi: 10.1109/TAES.2013.6404133 |
| 8 |
FENG T . Unified approach to missile guidance law for missile and target with bounded maneuverability[J]. IEEE Trans. on Aerospace and Electronic Systems, 2005, 41 (4): 1178- 1199.
doi: 10.1109/TAES.2005.1561882 |
| 9 |
FENG T . Capture region of a 3D PPN guidance law for intercepting high-speed targets[J]. Asian Journal of Control, 2012, 14 (5): 1215- 1226.
doi: 10.1002/asjc.396 |
| 10 |
FENG T . Capture region of a GIPN guidance law for missile and target with bounded maneuverability[J]. IEEE Trans. on Aerospace and Electronic Systems, 2011, 47 (1): 201- 213.
doi: 10.1109/TAES.2011.5705670 |
| 11 |
LI K B , ZHANG T , CHEN L . Ideal proportional navigation for exo-atmospheric interception[J]. Chinese Journal of Aeronautics, 2013, 26 (4): 976- 985.
doi: 10.1016/j.cja.2013.06.007 |
| 12 |
LI K B , CHEN L , TANG G . Improved differential geo-metric guidance commands for endoatmospheric interception of high-speed targets[J]. Science China Technological Sciences, 2013, 56 (2): 518- 528.
doi: 10.1007/s11431-012-5087-z |
| 13 |
PRASANNA H M , GHOSE D . Retro-proportional-navigation: a new guidance law for interception of high-speed targets[J]. Journal of Guidance, Control and Dynamics, 2012, 35 (2): 377- 386.
doi: 10.2514/1.54892 |
| 14 | 周觐, 雷虎民, 侯峰, 等. 拦截高速目标的比例与反比例导引捕获区分析[J]. 宇航学报, 2018, 39 (9): 1002- 1011. |
| ZHOU J , LEI H M , HOU F , et al. Capture region analysis of proportional navigation and retro-proportional navigation gui-dance for hypersonic target interception[J]. Aerospace Science and Technology, 2018, 39 (9): 1002- 1011. | |
| 15 | 于大腾, 王华, 李林森, 等. 能量约束下的动能拦截弹逆轨拦截攻击区建模[J]. 宇航学报, 2017, 38 (7): 704- 713. |
| YU D T , WANG H , LI L S , et al. Attack area modeling of kinetic kill vehicle head-on interception with energy constraint[J]. Journal of Astronautics, 2017, 38 (7): 704- 713. | |
| 16 | YU D T, WANG H, LI K B, et al. The capture region of TPN guidance law for orbital pursuit-evasion with limited maneuvera-bility[C]//Proc. of IEEE Chinese Guidance, Navigation and Control Conference, 2016: 937-942. |
| 17 |
周觐, 雷虎民. 真比例导引反高速目标拦截能力分析[J]. 系统工程与电子技术, 2018, 40 (10): 2296- 2304.
doi: 10.3969/j.issn.1001-506X.2018.10.21 |
|
ZHOU J , LEI H M . Interception capability analysis of the true proportional navigation guidance law against hypersonic targets[J]. Systems Engineering and Electronics, 2018, 40 (10): 2296- 2304.
doi: 10.3969/j.issn.1001-506X.2018.10.21 |
|
| 18 | LI K B , SU W S , CHEN L . Performance analysis of realistic true proportional navigation against maneuvering targets using Lyapunov-like approach[J]. Aerospace Science and Technology, 2017, 69, 333- 341. |
| 19 | 白志会, 黎克波, 苏文山, 等. 现实真比例导引拦截任意机动目标捕获区域[J]. 航空学报, 2020, 41 (8): 338- 348. |
| BAI Z H , LI K B , SU W S , et al. Capture region of RTPN guidance law against arbitrarily maneuvering targets[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (8): 338- 348. | |
| 20 |
黄景帅, 张洪波, 汤国建, 等. 机动目标拦截新型微分几何制导律设计[J]. 系统工程与电子技术, 2018, 40 (10): 2288- 2295.
doi: 10.3969/j.issn.1001-506X.2018.10.20 |
|
HUANG J S , ZHANG H B , TANG G J , et al. Design of differential geometric guidance law against maneuvering targets[J]. Systems Engineering and Electronics, 2018, 40 (10): 2288- 2295.
doi: 10.3969/j.issn.1001-506X.2018.10.20 |
|
| 21 | LI K B , SU W S , CHEN L . Performance analysis of differential geometric guidance law against high-speed target with arbitrarily maneuvering acceleration[J]. Journal of Aerospace Engineering, 2019, 233 (10): 3547- 3563. |
| 22 |
LIANG H Z , WANG J Y , WANG Y H , et al. Optimal guidance against active defense ballistic missiles via differential game strategies[J]. Chinese Journal of Aeronautic, 2020, 33 (3): 978- 989.
doi: 10.1016/j.cja.2019.12.009 |
| 23 | BANERJEE A, NABI M, RAGHUNATHAN T. Time-energy optimal guidance strategy for realistic interceptor using pseudospectral method[J]. Transactions of the Institute of Measurement and Control, 2020, 42(5): 014233122091091. |
| 24 | WANG X , QIU X , PRAVEEN A . Study on fuzzy neural sliding mode guidance law with terminal angle constraint for maneuvering target[J]. Mathematical Problems in Engineering, 2020, 4597937. |
| 25 | 杨云刚, 刘钧圣, 杨敏, 等. 滑模变结构导引律在防空反导技术中的应用[J]. 指挥控制与仿真, 2018, 40 (4): 101- 103. |
| YANG Y G , LIU J X , YANG M , et al. Application of sliding mode variable structure guidance law in air defense and anti-missile technology[J]. Command Control & Simulation, 2018, 40 (4): 101- 103. | |
| 26 | XIA R S , CHEN M , WU Q X , et al. Neural network based integral sliding mode optimal flight control of near space hypersonic vehicle[J]. Neurocomputing, 2020, 379, 41- 52. |
| 27 |
LAN Y T , CHEN X D . Trajectory tracking system of wheeled robot based on immune algorithm and sliding mode variable structure[J]. Intelligent Service Robotics, 2020,
doi: 10.1007/s11370-020-00325-8 |
| 28 | LEONARDO A . Iterative learning control for homing guidance design of missiles[J]. Defense Technology, 2017, 13 (5): 360- 366. |
| 29 | HUANG H M , HU Y M , et al. Study on the performance of spatial discretization schemes for hypersonic flow[J]. International Journal of Numerical Methods for Heat & Fluid Flow, 2018, |
| 30 | HU Y M , HUANG H M , GUO J , et al. Shock wave standoff distance of near space hypersonic vehicles[J]. Science China (Technological Sciences), 2017, 8 (60): 5- 13. |
| [1] | 张锦林, 李炯, 雷虎民, 李万礼, 唐骁. 有限过载的三维现实真比例导引的捕获区域[J]. 系统工程与电子技术, 2022, 44(3): 986-997. |
| [2] | 王晓海, 孟秀云, 周峰, 邱文杰. 基于偏置比例导引的落角约束滑模制导律[J]. 系统工程与电子技术, 2021, 43(5): 1295-1302. |
| [3] | 姜尚, 田福庆, 孙世岩, 梁伟阁, 尤栋. 考虑自动驾驶仪动态特性与攻击角约束的模糊自适应动态面末制导律[J]. 系统工程与电子技术, 2019, 41(2): 389-401. |
| [4] | 周觐, 雷虎民. 真比例导引反高速目标拦截能力分析[J]. 系统工程与电子技术, 2018, 40(10): 2296-2304. |
| [5] | 刘锦涛, 吴文海, 李静, 周思羽, 张源原. 无速度测量的四旋翼无人机移动目标跟踪控制[J]. 系统工程与电子技术, 2017, 39(2): 369-375. |
| [6] | 邓志红, 蔡山波, 王博, 付梦印. 一种旋转调制惯导系统的复合旋转控制算法[J]. 系统工程与电子技术, 2016, 38(11): 2610-2616. |
| [7] | 邹昕光, 周荻, 杜润乐, 刘佳琪. 大气层外主动防御三维自适应滑模制导律[J]. 系统工程与电子技术, 2015, 37(2): 365-371. |
| [8] | 胡剑波, 李飞, 魏高乐, 高鹏, 王强. 不确定系统反推滑模变结构理论及其应用[J]. 系统工程与电子技术, 2014, 36(3): 519-526. |
| [9] | 花文华,陈兴林. 双重控制导弹微分对策制导方法[J]. Journal of Systems Engineering and Electronics, 2011, 33(3): 627-632. |
| [10] | 韩建群, 郑萍. 永磁同步电动机中混沌运动的滑模控制[J]. Journal of Systems Engineering and Electronics, 2009, 31(3): 723-725. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||