
系统工程与电子技术 ›› 2021, Vol. 43 ›› Issue (11): 3312-3320.doi: 10.12305/j.issn.1001-506X.2021.11.32
谷旭平*, 唐大全
收稿日期:2020-12-31
出版日期:2021-11-01
发布日期:2021-11-12
通讯作者:
谷旭平
作者简介:谷旭平(1997—), 男, 硕士研究生, 主要研究方向为无人机集群控制与导航|唐大全(1965—), 男, 教授, 硕士研究生导师, 硕士,主要研究方向为无人机导航与控制
Xuping GU*, Daquan TANG
Received:2020-12-31
Online:2021-11-01
Published:2021-11-12
Contact:
Xuping GU
摘要:
针对多无人机任务规划问题, 以细菌觅食算法为基础, 融合遗传算法的交叉变异操作, 进行任务分配。为了提高算法的收敛能力, 动态自适应调节算法的游动步长、繁殖次数和迁徙概率。基于Lyapunov导航向量场和避障向量场构建融合向量场, 模拟真实静态和动态障碍物环境, 在任务分配阶段完成航迹规划; 基于合同网拍卖算法, 进行无人机坠毁后的任务重分配。仿真结果显示, 改进算法满足任务规划需求, 在考虑静态和动态障碍物的环境下, 能够高效的完成多异构无人机的任务分配以及重分配且总代价最小。
中图分类号:
谷旭平, 唐大全. 基于细菌觅食算法的多异构无人机任务规划[J]. 系统工程与电子技术, 2021, 43(11): 3312-3320.
Xuping GU, Daquan TANG. Multi-heterogeneous UAV task planning based on bacterial foraging algorithm[J]. Systems Engineering and Electronics, 2021, 43(11): 3312-3320.

图1
UAV目标感知域"


图2
细菌编码"


图3
任务队列"

表1
测试函数及其相关属性"
| 函数 | 维度 | 范围 | fmin |
| 30 | [-100, 100] | 0 | |
| 30 | [-1.28, 1.28] | 0 | |
| 30 | [-32, 32] | 0 | |
| 30 | [-600, 600] | 0 | |
| 30 | [-10, 10] | 0 | |
| 3 | [1, 3] | -3.86 | |
| 4 | [0, 10] | -10.1 | |
| 2 | [-65, 65] | 1 |
表2
测试函数运行结果"
| 函数 | 维度 | 算法 | 最优值 | 平均值 | 标准方差 | 运行时间/s | 函数 | 维度 | 算法 | 最优值 | 平均值 | 标准方差 | 运行时间/s | |
| f1(x) | 30 | BFO | 4.51E-02 | 4.93E-02 | 2.10E-16 | 1.31E+02 | f5(x) | 30 | BFO | 9.76E-02 | 1.23E-01 | 7.54E-22 | 1.31E+02 | |
| BFO-1 | 3.07E-02 | 3.11E-02 | 1.72E-24 | 1.02E+02 | BFO-1 | 1.36E-02 | 1.41E-02 | 4.53E-14 | 1.08E+02 | |||||
| BFO-2 | 5.34E-02 | 5.37E-02 | 3.23E-14 | 7.25E-01 | BFO-2 | 3.07E-02 | 3.13E-02 | 4.13E-23 | 1.56E-00 | |||||
| GA | 1.34E-01 | 2.03E-01 | 1143E-02 | 7.73E-01 | GA | 6.13E-00 | 1.22 E+01 | 4.35E-00 | 6.77E-01 | |||||
| PSO | 5.23E+04 | 5.34E+04 | 2.13E+03 | 3.25E-01 | PSO | 3.94E+01 | 4.57E+01 | 5.34E+01 | 2.85E-01 | |||||
| SSO | 1.59E-01 | 1.60E-01 | 0.10E-04 | 1.40E-01 | SSO | 7.14E+01 | 8.97E+01 | 1.55E+01 | 6.142E-01 | |||||
| f2(x) | 30 | BFO | 2.14E-01 | 2.25E-01 | 0.14E-23 | 1.40E+02 | f6(x) | 3 | BFO | -3.86E-00 | -3.86E-00 | 0 | 1.07E+02 | |
| BFO-1 | 1.20E-03 | 1.20E-03 | 0 | 2.19E+02 | BFO-1 | -3.86E-00 | -3.86E-00 | 0 | 1.11E+02 | |||||
| BFO-2 | 2.04E-02 | 2.95E-02 | 0.21E-14 | 7.04E-01 | BFO-2 | -3.86E-00 | -3.86E-00 | 0 | 7.04E-01 | |||||
| GA | 3.67E-01 | 4.13E-01 | 2.25E-01 | 6.78E-01 | GA | -3.86E-00 | -3.86E-00 | 4.03E-04 | 6.30E-01 | |||||
| PSO | 6.19E-00 | 7.14E-00 | 1.36E-00 | 3.07E-01 | PSO | -3.78E-00 | -3.70E-00 | 5.31E-02 | 2.25E-01 | |||||
| SSO | 3.48E-01 | 4.12E-01 | 1.17E-01 | 6.24E-01 | SSO | -3.86E-00 | -3.86E-00 | 1.23E-00 | 8.39E-01 | |||||
| f3(x) | 30 | BFO | 5.16E-02 | 5.21E-02 | 3.20E-24 | 1.28E+02 | f7(x) | 4 | BFO | -1.01E+01 | -1.01E+01 | 2.44E-12 | 1.19E+02 | |
| BFO-1 | 7.03E-02 | 7.12E-02 | 1.21E-13 | 1.18E+02 | BFO-1 | -1.01E+01 | -1.01E+01 | 5.14E-21 | 1.51E+02 | |||||
| BFO-2 | 2.86E-02 | 2.87E-02 | 3.41E-14 | 7.01E-01 | BFO-2 | -1.01E+01 | -1.01E+01 | 1.53E-21 | 7.42E-01 | |||||
| GA | 4.41E-00 | 5.23E-00 | 2.12E-00 | 8.52E-01 | GA | -1.01E+01 | -1.02E+01 | 9.54E-13 | 6.32E-01 | |||||
| PSO | 1.93E+01 | 2.36E+01 | 5.23E+01 | 4.73E-01 | PSO | -4.19E-00 | -3.21E-00 | 1.43E-00 | 2.51E-01 | |||||
| SSO | 1.80E-00 | 1.93E-00 | 2.34E-02 | 8.56E-01 | SSO | -1.01E+01 | -1.00E+01 | 2.31E-11 | 8.32E-01 | |||||
| f4(x) | 30 | BFO | 8.86E-02 | 8.91E-02 | 3.42E-12 | 1.37E+02 | f8(x) | 2 | BFO | 9.98E-01 | 9.98E-01 | 0 | 2.19E+02 | |
| BFO-1 | 6.97E-02 | 7.03E-02 | 2.17E-53 | 1.19E+02 | BFO-1 | 9.98E-01 | 9.98E-01 | 0 | 5.34E+02 | |||||
| BFO-2 | 2.58E-01 | 2.63E-01 | 2.01E-24 | 1.04E-01 | BFO-2 | 9.98E-01 | 9.98E-01 | 1.21E-14 | 1.12E-00 | |||||
| GA | 1.81E-00 | 7.11E-00 | 7.35E-00 | 7.89E-01 | GA | 9.98E-01 | 9.98E-01 | 0 | 1.16E-00 | |||||
| PSO | 2.74E+02 | 3.01 | 4.25E+02 | 4.35E-01 | PSO | 3.96E-00 | 4.57E-00 | 1.73E-00 | 6.30E-01 | |||||
| SSO | 3.40E-01 | 7.86E-01 | 1.43E+01 | 9.29E-01 | SSO | 1.99E-00 | 2.43E-00 | 9.56E-00 | 2.34E-00 |

图4
算法比较示意图"

表3
UAV属性信息"
| 序号 | 位置/m | 类型 | 价值 | 武器数量 | 航速/(m/s) |
| 1 | (20, 30) | 强击机 | 0.8 | 12 | 40 |
| 2 | (20, 40) | 强击机 | 0.7 | 8 | 40 |
| 3 | (20, 50) | 侦察机 | 0.6 | 0 | 40 |
| 4 | (30, 30) | 侦察机 | 0.9 | 0 | 40 |
| 5 | (30, 40) | 轰炸机 | 0.6 | 12 | 40 |
| 6 | (40, 30) | 轰炸机 | 0.8 | 12 | 40 |
表4
作战目标属性信息"
| 目标编号 | 位置/m | 目标价值 | 武器需求 | 威胁系数 |
| A1 | (100, 450) | 0.75 | 1 | 0.34 |
| A2 | (300, 400) | 0.65 | 2 | 0.45 |
| A3 | (350, 600) | 0.84 | 1 | 0 |
| A4 | (150, 800) | 0.54 | 1 | 0 |
| A5 | (400, 850) | 0.98 | 2 | 0.12 |
| A6 | (600, 700) | 0.72 | 1 | 0 |
| A7 | (750, 800) | 0.55 | 1 | 0 |
| A8 | (670, 520) | 0.98 | 3 | 0 |
| A9 | (780, 620) | 0.34 | 1 | 0 |
| A10 | (600, 340) | 0.65 | 2 | 0 |
| A11 | (600, 100) | 0.75 | 1 | 0.32 |
| A12 | (800, 200) | 0.86 | 1 | 0.12 |
表5
障碍物相关信息"
| 障碍物 | 位置/m | 碰撞半径/m | 避碰半径/m | 自身半径/m |
| 1 | (300, 700) | 20 | 60 | 10 |
| 2 | (450, 250) | 30 | 70 | 20 |
| 3 | (750, 450) | 40 | 80 | 30 |
| 4 | (500, 500) | 50 | 90 | 40 |
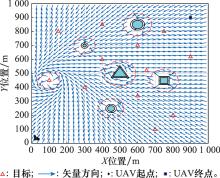
图5
融合向量场"


图6
UAV1航迹"

表6
任务分配结果"
| UAV | 任务分配结果与预计完成时间/s | ||||
| UAV1 | S1 | T1 | T4 | T5 | E1 |
| - | (C, A, V) | (C, A, V) | (C, A, V) | - | |
| 0 | 293.1 | 577.6 | 869.2 | 886.9 | |
| UAV2 | S2 | T3 | T6 | T7 | E2 |
| - | (C, A, V) | (C, A, V) | (C, A, V) | - | |
| 0 | 293.2 | 584.8 | 872.8 | 878.1 | |
| UAV3 | S3 | T11 | T12 | T9 | E3 |
| - | (C, V) | (C, V) | (C, V) | - | |
| 0 | 299.5 | 585.8 | 869.3 | 873.5 | |
| UAV4 | S4 | T2 | T10 | T8 | E4 |
| - | (C, V) | (C, V) | (C, V) | - | |
| 0 | 302.5 | 599.4 | 883.2 | 893.1 | |
| UAV5 | S5 | T2 | T10 | T8 | E5 |
| - | (A) | (A) | (A) | - | |
| 0 | 302.5 | 599.4 | 883.2 | 893.1 | |
| UAV6 | S6 | T11 | T12 | T9 | E6 |
| - | (A) | (A) | (A) | - | |
| 0 | 299.5 | 585.8 | 869.3 | 873.5 | |

图7
任务执行情况示意图"


图8
收益曲线"
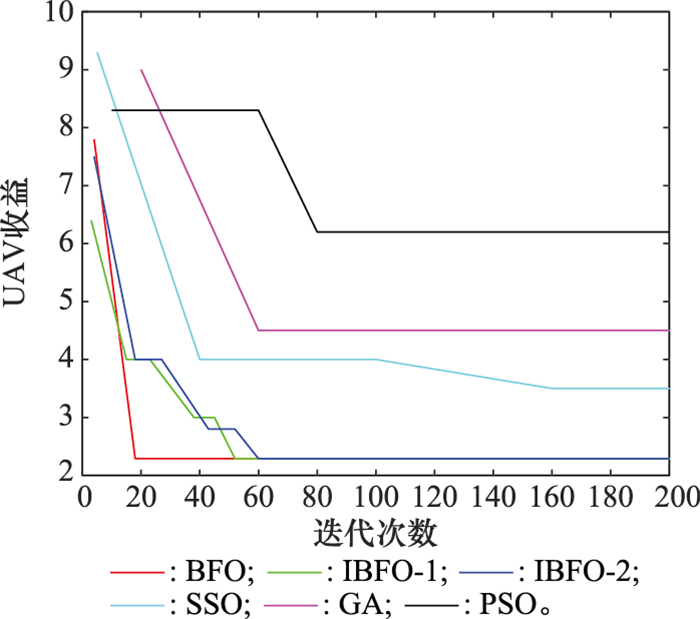
表7
运行时间对比"
| 算法 | 运行时间t/s |
| BFO | 10.23 |
| BFO-1 | 11.21 |
| BFO-2 | 1.22 |
| SSO | 1.45 |
| PSO | 1.23 |
| GA | 1.34 |

图9
任务重分配路径曲线"

| 1 | HUANG T P , HUANG D Q , WANG Z K , et al. Robust tracking control of a quadrotor UAV based on adaptive sliding mode controller[J]. Complexity, 2019, 29 (1): 37- 42. |
| 2 |
SUN F J , WANG X C , ZHANG R . Task scheduling system for UAV operations in agricultural plant protection environment[J]. Journal of Ambient Intelligence and Humanized Computing, 2020, 17 (1): 37- 46.
doi: 10.1007/s12652-020-01969-1 |
| 3 | MENG H W , GUO Y M . Automatic safety routing inspection of the electric circuits based on UAV light detection and ranging[J]. Destech Transactions on Engineering and Technology Research, 2017, 23 (2): 102- 113. |
| 4 | SCHERER J, RINNER B. Persistent multi-UAV surveillance with energy and communication constraints[C]//Proc. of the IEEE International Conference on Automation Science and Engineering, 2016: 1225-1230. |
| 5 |
CHEN H X , NAN Y , YANG Y . Multi-UAV reconnaissance task assignment for heterogeneous targets based on modified symbiotic organisms search algorithm[J]. Sensors, 2019, 19 (3): 734- 745.
doi: 10.3390/s19030734 |
| 6 | GRAYSON S . Search & rescue using multi-robot systems[J]. School of Computer Science and Informatics, University College Dublin, 2014, 14 (2): 112- 132. |
| 7 |
OH B H , KIM K , CHOI H L , et al. Cooperative multiple agent-based algorithm for evacuation planning for victims with different urgencies[J]. Journal of Aerospace Information Systems, 2018, 15 (6): 382- 395.
doi: 10.2514/1.I010589 |
| 8 |
JUNG S , ARIYUR K B . Strategic cattle roundup using multiple quadrotor UAVs[J]. International Journal of Aeronautical Space Science, 2017, 18, 315- 326.
doi: 10.5139/IJASS.2017.18.2.315 |
| 9 | LOTTES P, KHANNA R, PFEIFER J, et al. UAV-based crop and weed classification for smart farming[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2017: 3024-3031. |
| 10 | MAZA I, KONDAK K, BERNARD M, et al. Multi-UAV cooperation and control for load transportation and deployment[C]//Proc. of the 2nd International Symposium on UAVs, 2009: 417-449. |
| 11 |
OMAGARI H , HIGASHINO S I . Provisional-ideal-point-based multi-objective optimization method for drone delivery problem[J]. International Journal of Aeronautical and Space Sciences, 2018, 19 (1): 262- 277.
doi: 10.1007/s42405-018-0021-7 |
| 12 |
BEKTAS T . The multiple traveling salesman problem: an overview of formulations and solution procedures[J]. Omega, 2006, 34 (3): 209- 219.
doi: 10.1016/j.omega.2004.10.004 |
| 13 | SHMOYS D B , TARDOS É . An approximation algorithm for the generalized assignment problem[J]. Mathematical Programming, 1993, 62 (1): 461- 474. |
| 14 | PISINGER D , ROPKE S . A general heuristic for vehicle routing problems[J]. Computers & Operations Research, 2007, 34 (8): 2403- 2435. |
| 15 |
BÉNICHOU M , GAUTHIER J M , GIRODET P , et al. Experiments in mixed-integer linear programming[J]. Mathematical Programming, 1971, 1 (1): 76- 94.
doi: 10.1007/BF01584074 |
| 16 | GHALENOEI M R, HAJIMIRSADEGHI H, LUCAS C. Discrete invasive weed optimization algorithm: application to coope-rative multiple task assignment of UAVs[C]//Proc. of the IEEE 48h Conference on Decision and Control Held Jointly with 28th Chinese Control Conference, 2009: 1665-1670. |
| 17 | ABD-ELRAHMAN E, AFIFI H, ATZORI L, et al. IoT-D2D task allocation: an award-driven game theory approach[C]//Proc. of the IEEE 23rd International Conference on Telecommunications, 2016. |
| 18 | XIA C, LIANG Y T, YUAN L Y, et al. Cooperative task assignment and track planning for multi-UAV attack mobile targets[J]. Journal of Intelligent & Robotic Systems, 100(3): 1383-1400. |
| 19 | LI M , LIU C , LI K , et al. Multi-task allocation with an optimized quantum particle swarm method[J]. Applied Soft Computing, 2020, 96, 106603. |
| 20 |
YE F , CHEN J , TIAN Y , et al. Cooperative task assignment of a heterogeneous multi-UAV system using an adaptive genetic algorithm[J]. Electronics, 2020, 9 (4): 687- 692.
doi: 10.3390/electronics9040687 |
| 21 |
KIM K S , KIM H Y , CHOI H L . A bid-based grouping method for communication-efficient decentralized multi-UAV task allocation[J]. International Journal of Aeronautical and Space Sciences, 2020, 21 (1): 290- 302.
doi: 10.1007/s42405-019-00205-1 |
| 22 | CHEN C , BAO W D , MEN T M , et al. NECTAR-an agent-based dynamic task allocation algorithm in the UAV swarm[J]. Complexity, 2020, 9 (14): 34- 45. |
| 23 | 孙浩磊. 基于群体智能算法的无人机路径规划技术研究[D]. 沈阳: 沈阳理工大学, 2019. |
| SUN H L. Research on UAV path planning technology based on swarm intelligence algorithms[D]. Shenyang: Shenyang Ligong University, 2019. | |
| 24 | 谌海云, 陈华胄, 刘强. 基于改进人工势场法的多无人机三维编队路径规划[J]. 系统仿真学报, 2020, 32 (3): 414- 420. |
| CHEN Y H , CHEN Y Z , LIU Q . Multi-UAV 3D formation path planning based on improved artificial potential field[J]. Journal of System Simulation, 2020, 32 (3): 414- 420. | |
| 25 | 凌富园, 杜承烈, 孙宝亮, 等. 基于不规则障碍物环境下无人机的改进几何路径规划算法[J]. 航空电子技术, 2019, 50 (4): 40- 46. |
| LING F Y , DU C L , SUN B L , et al. An improved geometrical path planning algorithmfor UAV in irregular-obstacle environment[J]. Avionics Technology, 2019, 50 (4): 40- 46. | |
| 26 |
FARSHI T R , ORUJPOUR M . A multi-modal bacterial foraging optimization algorithm[J]. Journal of Ambient Intelligence and Humanized Computing, 2021, 1, 1- 15.
doi: 10.1007/s12652-020-02755-9 |
| 27 | SAUNDERS J , CALL B , CURTIS A , et al. Static and dynamic obstacle avoidance in miniature air vehicles[M]. Virginia: Infotech@ Aerospace, 2005: 6950 |
| 28 | WILHELM J, CLEM G, CASBEER D, et al. Circumnavigation and obstacle avoidance guidance for UAVs using gradient vector fields[C]//Proc. of the AIAA Scitech Forum, 2019. |
| 29 | WANG X , YADAV V , BALAKRISHNAN S N . Cooperative UAV formation flying with obstacle/collision avoidance[J]. IEEE Trans. on Control Systems Technology, 2007, 15 (4): 672- 679. |
| 30 | MIRJALILI S. Genetic algorithm[M]// Evolutionary algorithms and neural networks, Brisbane: Springer, 2019: 43-55. |
| 31 | XIA X W , GUI L , HE G L , et al. An expanded particle swarm optimization based on multi-exemplar and forgetting ability[J]. Information Sciences, 2020, 508, 105- 120. |
| 32 | BAȘE , ÜLKER E . A binary social spider algorithm for conti-nuous optimization task[J]. Soft Computing, 2020, 24 (17): 12953- 12979. |
| 33 | SUV W, DOU L H, FANG H, et al. Task allocation for multi-robot cooperative hunting behavior based on improved auction algorithm[C]//Proc. of the IEEE 27th Chinese Control Conference, 2008: 435-440. |
| [1] | 孙田野, 孙伟, 吴建军. 改进Quatre算法的无人机编队快速集结方法[J]. 系统工程与电子技术, 2022, 44(9): 2840-2848. |
| [2] | 余婧, 雍恩米, 陈汉洋, 郝东, 张显才. 面向多无人机协同对地攻击的双层任务规划方法[J]. 系统工程与电子技术, 2022, 44(9): 2849-2857. |
| [3] | 徐星光, 王晓峰, 姚璐, 任章. 固定翼无人机编队构型与通信拓扑优化[J]. 系统工程与电子技术, 2022, 44(9): 2936-2946. |
| [4] | 杨建峰, 肖和业, 李亮, 白俊强, 董维浩. 基于模糊聚类和专家评分机制的无人机多层次模块划分方法[J]. 系统工程与电子技术, 2022, 44(8): 2530-2539. |
| [5] | 卢元杰, 刘志敏, 孙智孝, 阚东. 基于模型的无人机系统架构综合评估方法[J]. 系统工程与电子技术, 2022, 44(4): 1239-1245. |
| [6] | 李洪瑶, 李小强, 韩心中, 谢学立, 席建祥. 基于决策融合的多无人机协同目标检测识别算法[J]. 系统工程与电子技术, 2022, 44(3): 746-754. |
| [7] | 张源原, 高阳, 朱鹏, 刘锦涛, 谷树山. 基于着色Petri网的无人机侦察战术规划[J]. 系统工程与电子技术, 2022, 44(3): 900-907. |
| [8] | 庞维建, 李辉, 黄谦, 李朋, 马贤明. 基于本体的无人系统任务规划研究综述[J]. 系统工程与电子技术, 2022, 44(3): 908-920. |
| [9] | 谷旭平, 唐大全. 基于联邦滤波算法的无人机集群分层协同导航[J]. 系统工程与电子技术, 2022, 44(3): 967-976. |
| [10] | 余雪勇, 朱烨, 邱礼翔, 朱洪波. 基于无人机辅助边缘计算系统的节能卸载策略[J]. 系统工程与电子技术, 2022, 44(3): 1022-1029. |
| [11] | 杨兴家, 段克清, 李想, 祁炜. 无人机集群协同探测距离解模糊方法[J]. 系统工程与电子技术, 2022, 44(2): 480-489. |
| [12] | 符小卫, 潘静. 无人机集群规避动态障碍物的分布式队形控制[J]. 系统工程与电子技术, 2022, 44(2): 529-537. |
| [13] | 陈都, 孟秀云. 基于自适应郊狼算法的无人机离线航迹规划[J]. 系统工程与电子技术, 2022, 44(2): 603-611. |
| [14] | 刘步花, 丁丹, 杨柳, 薛乃阳, 刘仲谦. 基于DNN的无人机数据OFDM传输技术[J]. 系统工程与电子技术, 2022, 44(2): 696-702. |
| [15] | 吴志鹏, 张平, 李震, 黄磊, 刘畅, 高硕. 基于轻小型无人机雷达的植被高度反演方法[J]. 系统工程与电子技术, 2022, 44(12): 3667-3675. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||