
系统工程与电子技术 ›› 2021, Vol. 43 ›› Issue (5): 1346-1353.doi: 10.12305/j.issn.1001-506X.2021.05.23
蔡保杰*( ), 邵雷()
), 邵雷()
收稿日期:2020-07-13
出版日期:2021-05-01
发布日期:2021-04-27
通讯作者:
蔡保杰
E-mail:18332729660@163.com;shaolei_zj@163.com
作者简介:蔡保杰(1995—), 男, 硕士研究生, 主要研究方向为组合导航和卡尔曼滤波。E-mail: 基金资助:
Baojie CAI*(), Lei SHAO()
Received:2020-07-13
Online:2021-05-01
Published:2021-04-27
Contact:
Baojie CAI
E-mail:18332729660@163.com;shaolei_zj@163.com
摘要:
组合导航系统卫星信号在传播过程中容易受到干扰导致卫星导航观测值出现故障。对于此问题, 提出一种基于最小二乘拟合原理的抗差滤波算法, 根据检测量的分布状态将故障分为三段判别域, 分别为无故障、偏差和超差的情况。无故障时不做处理, 出现偏差时对观测值进行降权处理, 对于超差情况, 用前几个时刻的观测值组成的拟合函数进行一个时刻的外延, 代替当前时刻的故障观测值。仿真结果表明, 三段判别域相对于两段判别域多了对偏差情况的处理, 提高了导航精度。连续时间内发生超差情况时, 相比于使用降权法, 基于最小二乘拟合的抗差滤波算法导航精度更高, 稳定性更好。
中图分类号:
蔡保杰, 邵雷. 三段判别域与最小二乘拟合的抗差滤波算法[J]. 系统工程与电子技术, 2021, 43(5): 1346-1353.
Baojie CAI, Lei SHAO. Robust filtering algorithm based on three discriminant domain and least squares fitting[J]. Systems Engineering and Electronics, 2021, 43(5): 1346-1353.

图1
经典卡尔曼滤波流程图"

表1
显著性水平与阈值"
| 显著性水平α | 阈值T(1) |
| 0.975 | 0.001 |
| 0.950 | 0.004 |
| 0.900 | 0.016 |
| 0.750 | 0.102 |
| 0.250 | 1.323 |
| 0.100 | 2.706 |
| 0.050 | 3.841 |
| 0.025 | 5.024 |
| 0.010 | 6.635 |
| 0.005 | 7.879 |

图2
误差为5 m时卡方检测量分布图"
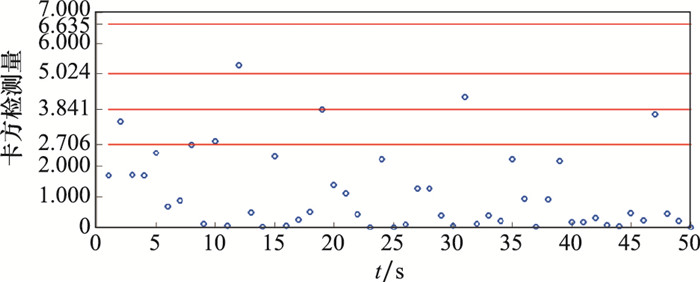

图3
误差为10 m时卡方检测量分布图"
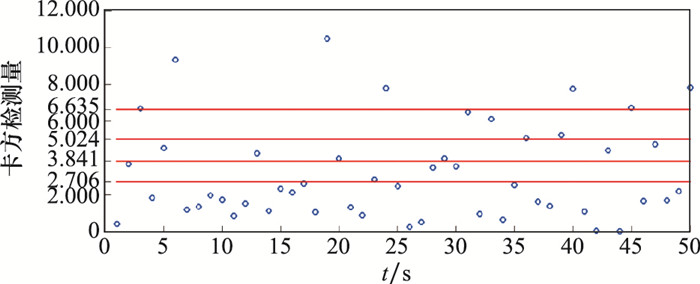
图4
误差为15 m时卡方检测量分布图"
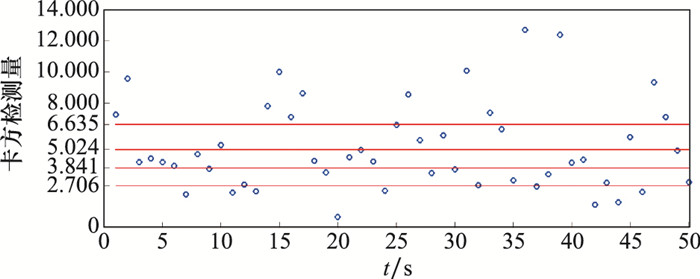
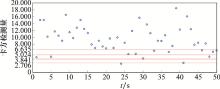
图5
误差为20 m时卡方检测量分布图"
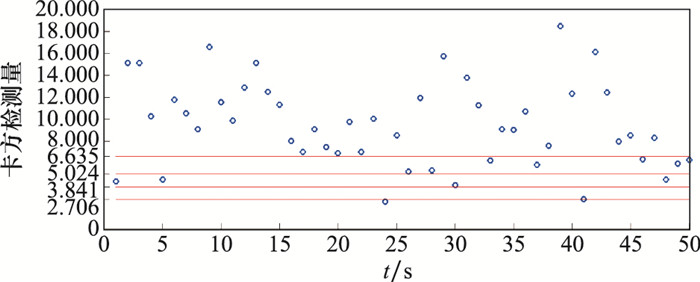
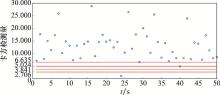
图6
误差为25 m时卡方检测量分布图"
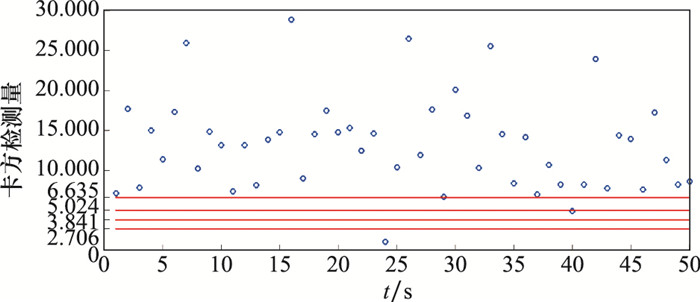
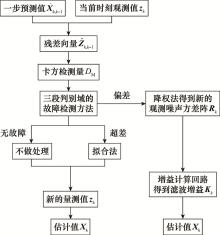
图7
三段判别域最小二乘拟合抗差滤波算法流程图"

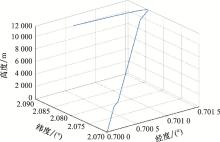
图8
模拟飞机飞行轨迹图"

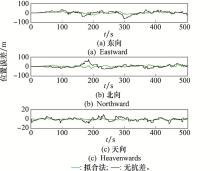
图9
拟合法抗差滤波与无抗差滤波位置误差"

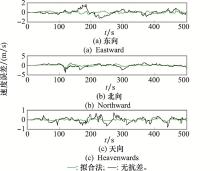
图10
拟合法抗差滤波与无抗差滤波速度误差"
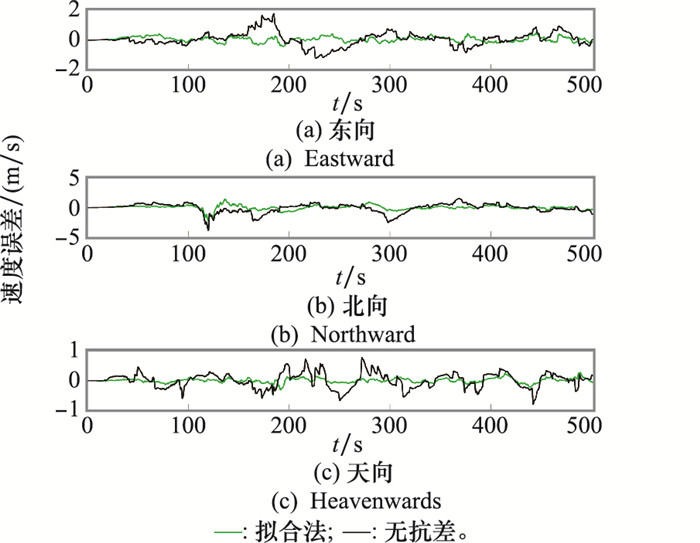
图11
拟合法抗差滤波与纯惯导位置误差"

图12
拟合法抗差滤波与纯惯导速度误差"
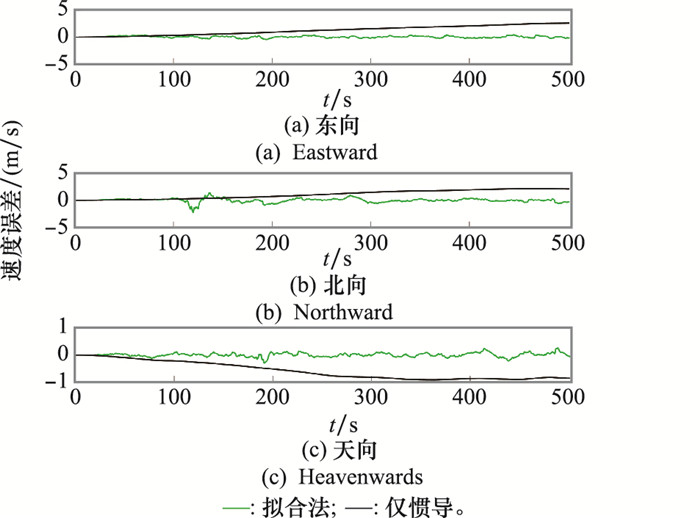
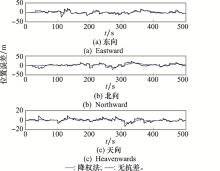
图13
偏差情况降权法和无抗差滤波位置误差比较"


图14
偏差情况降权法和无抗差滤波速度误差比较"
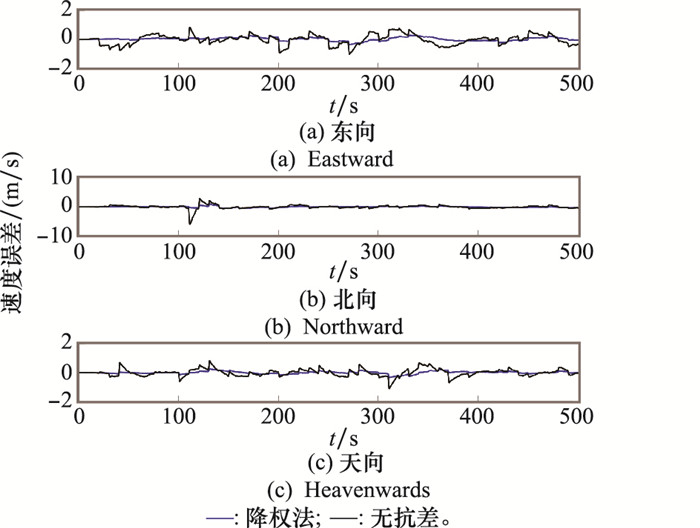
表2
观测量误差为20 m时导航误差范围"
| 抗差滤波 | 无抗差滤波 | |
| 东向位置误差/m | -11.8~6.06 | -25.8~32.6 |
| 北向位置误差/m | -6.64~7.54 | -20.5~34.9 |
| 天向位置误差/m | -2.62~2.57 | -7.9~13.9 |
| 东向速度误/(m/s) | -0.3~0.3 | -1.16~1.11 |
| 东向速度误差/(m/s) | -1.3~1.2 | -1.8~5.2 |
| 东向速度误差/(m/s) | -0.2~0.3 | -0.8~1.11 |
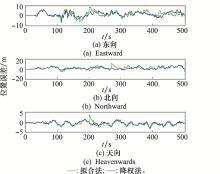
图15
单时刻故障拟合法与降权法位置误差"
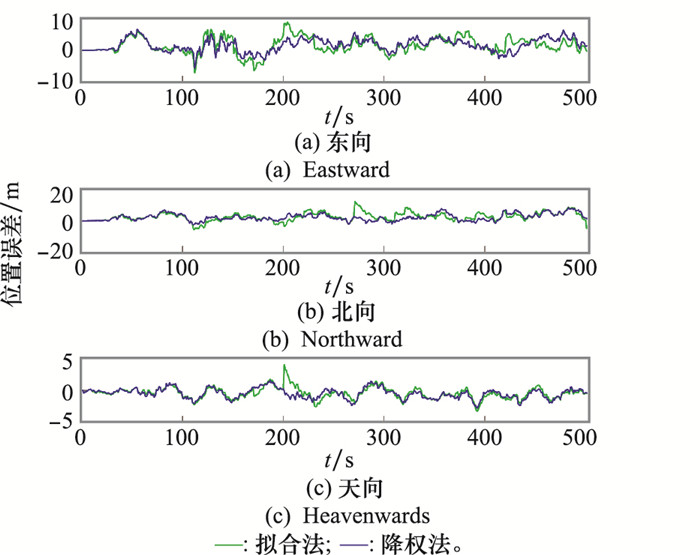
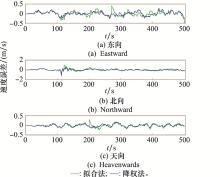
图16
单时刻故障拟合法与降权法速度误差"
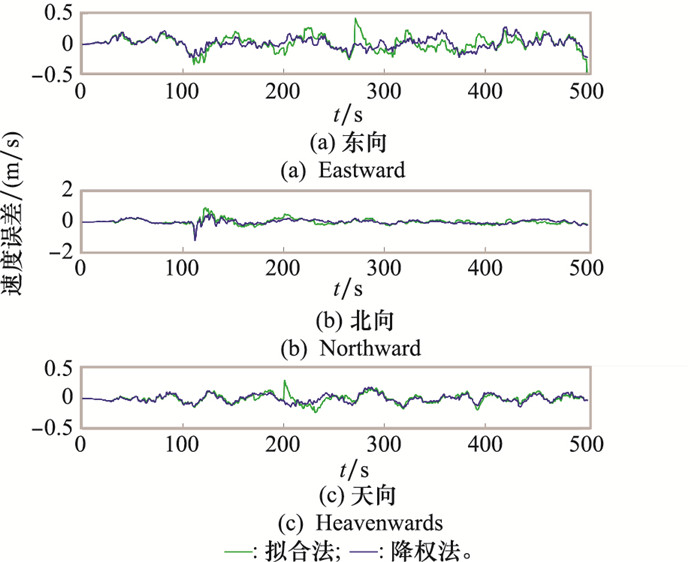
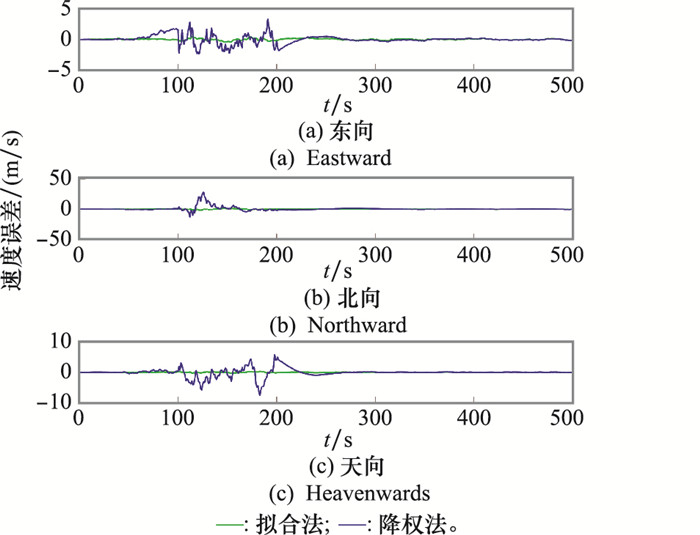
表3
观测量误差为100 m时导航误差范围"
| 降权法 | 拟合法 | |
| 东向位置误差/m | -6.86~5.41 | -8.11~12.09 |
| 北向位置误差/m | -4.89~9.74 | -8.26~8.58 |
| 天向位置误差/m | -2.72~6.52 | -3.65~2.37 |
| 东向速度误差/(m/s) | -0.30~0.25 | -0.38~0.41 |
| 东向速度误差/(m/s) | -0.63~0.68 | -0.67~1.06 |
| 天向速度误差/(m/s) | -0.15~0.11 | -0.17~1.18 |
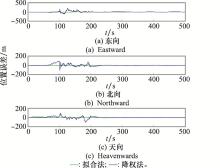
图17
连续时刻故障拟合法与降权法位置误差"
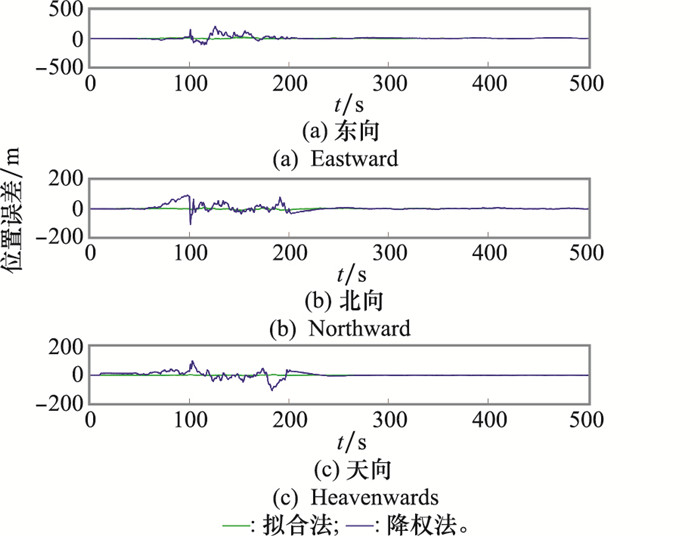
图18
连续时刻故障拟合法与降权法速度误差"
| 1 |
ABOLHASANI M , RAHMANI M . Robust Kalman filtering for discrete-time systems with stochastic uncertain time-varying parameters[J]. Electronics Letters, 2017, 53 (3): 146- 148.
doi: 10.1049/el.2016.2520 |
| 2 |
BHATTIUI , OCHIENG W Y , FENG S J . Performance of rate detector algorithm for an integrated GPS/INS system in the presence of slowly growing error[J]. GPS Solutions, 2012, 16 (3): 293- 301.
doi: 10.1007/s10291-011-0231-y |
| 3 | KRARUP T , JUHL J , KUBIK K . Gotterdammerung over least squares adjustment[J]. Int Arch Photogramm, 1980, 23 (B3): 369- 378. |
| 4 |
CASPARY W , BORUTTA H . Robust estimation in deformation models[J]. Survey Review, 1987, 29 (223): 29- 45.
doi: 10.1179/sre.1987.29.223.29 |
| 5 | 付心如. INS/GNSS组合导航抗差自适应Kalman滤波方法研究[D]. 阜新: 辽宁工程技术大学, 2017. |
| FU X R. The robust adaptive kalman filter research of INS/GNSS integrated navigation[D]. Fuxin: Liaoning Technical University, 2017. | |
| 6 | 徐波. GNSS/INS组合导航滤波算法研究[D]. 徐州: 中国矿业大学, 2016. |
| XU B. GNSS/INS integrated navigation filter method research[D]. Xuzhou: China University of Mining and Technology, 2016. | |
| 7 |
GAO X L , LUO H , NING B K , et al. RL-AKF: an adaptive Kalman filter navigation algorithm based on reinforcement learning for ground vehicles[J]. Remote Sensing, 2020, 12 (11): 1704.
doi: 10.3390/rs12111704 |
| 8 |
WANG J L , ZHANG C X , JIA Q X , et al. Suboptimal adaptive Kalman filtering based on the proportional control of prior error covariance[J]. ISA Transactions, 2020, 100, 145- 154.
doi: 10.1016/j.isatra.2019.12.008 |
| 9 | LIU Y , FAN X , LYU C , et al. An innovative information fusion method with adaptive Kalman filter for integrated INS/GPS navigation of autonomous vehicles[J]. Mechanical Systems and Signal Processing, 2008, 100, 605- 616. |
| 10 | 张建, 喻国荣, 潘树国, 等. 基于卡方检验的GNSS观测值部分粗差抗差滤波算法[J]. 仪器仪表学报, 2019, 40 (8): 102- 109. |
| ZHANG J , YU G R , PAN S G , et al. Partial gross error robust filtering algorithm for GNSS observations based on chi-square test[J]. Chinese Journal of Scientific Instrument, 2019, 40 (8): 102- 109. | |
| 11 | 许长辉, 高井祥, 王坚. GNSS/INS组合系统的抗差卡尔曼滤波[J]. 中国矿业大学学报, 2010, 39 (5): 773- 778. |
| XU C H , GAO J X , WANG J . Robust Kalman filtering of GNSS/INS integrated system[J]. Journal of China University of Mining & Technology, 2010, 39 (5): 773- 778. | |
| 12 | QIAO G, LI Z, SUN Z, et al. Kalman filter restraining outliers for short baseline system[C]//Proc. of Intelligent Control and Automation, 2012: 322-325. |
| 13 | 秦永元. 卡尔曼滤波与组合导航原理[M]. 西安: 西北工业大学出版社, 2017. |
| QIN Y Y . The theory of Kalman filter and integrated navigation[M]. Xi'an: Northwestern Polytechnical University Press, 2017. | |
| 14 |
ZHANG D , DAI H , HU Q , et al. Robust adaptive UKF based on SVR for inertial based integrated navigation[J]. Defence Technology, 2020, 16, 846- 855.
doi: 10.1016/j.dt.2019.10.012 |
| 15 | 赵琳, 王小旭, 丁继成, 等. 组合导航系统非线性滤波算法综述[J]. 中国惯性技术学报, 2009, 17 (01): 46- 52, 58. |
| ZHAO L , WANG X X , DING J C , et al. Overview of nonlinear filter methods applied in integrated navigation system[J]. Journal of Chinese Inertial Technology, 2009, 17 (01): 46- 52, 58. | |
| 16 |
CHEN J , SHU B Z . A novel adaptively-robust strategy based on the mahalanobis distance for GPS/INS integrated navigation systems[J]. Sensors, 2018, 18 (3): 695- 699.
doi: 10.3390/s18030695 |
| 17 |
YAO Y Q , XU X S , ZHU C C . A hybrid algorithm for GPS/INS integration during GPS outages[J]. Measurement, 2017, 103, 42- 51.
doi: 10.1016/j.measurement.2017.01.053 |
| 18 |
XU X , XU X S , ZHANG T , et al. A Kalman filter for SINS self-alignment based on vector observation[J]. Sensors, 2017, 17 (2): 264- 282.
doi: 10.3390/s17020264 |
| 19 | GROVE P D . Principles of GNSS, inertial, and multisensor integrated navigation systems[M]. London: Artech House, 2008. |
| 20 | SHIN E H. Estimation techniques for low-cost inertial navigation[D]. Calgary: The university of Calgary, 2003. |
| 21 | 王新龙. SINS/GPS组合导航技术[M]. 北京: 北京航空航天大学出版社, 2015. |
| WANG X L . SINS/GPS integrated navigation technology[M]. Beijing: Beijing University of Aeronautics and Astronautics press, 2015. | |
| 22 |
GERASIMOS G. RIGATOS . Nonlinear Kalman filters and particle filters for integrated navigation of unmanned aerial vehicles[J]. Robotics and Autonomous Systems, 2012, 60 (7): 978- 995.
doi: 10.1016/j.robot.2012.03.001 |
| 23 | MAHALANOBIS P C . On the generalized distance in statistics[J]. Proceedings of the National Institute of Sciences of India, 1936, 2, 49- 55. |
| 24 | SIMON PARKINSON , SAAD KHAN . Identifying irregularities in security event logs through an object-based chi-squared test of independence[J]. Journal of Information Security & Applications, 2018, 40, 52- 62. |
| 25 |
FENG K , LI J , ZHANG X , et al. An improved strong tracking cubature Kalman filter for GPS/INS integrated navigation systems[J]. Sensors, 2018, 18 (6): 1919.
doi: 10.3390/s18061919 |
| 26 | ZHAO X , WANG S C , LIAO S Y , et al. An ultra-tightly coupled tracking method based on robust adaptive cubature Kalman filter[J]. Acta Automatica Sinica, 2014, 40 (11): 2530- 2540. |
| 27 | 苗岳旺, 周巍, 田亮, 等. 基于新息χ2检测的扩展卡尔曼滤波及其应用[J]. 武汉大学学报·信息科学版, 2008, 41 (2): 269- 273. |
| MIAO Y W , ZHOU W , TIAN L , et al. Extended robust Kalman filter based on innovation chi-square test algorithm and its application[J]. Geomatics and Information Science of Wuhan University, 2008, 41 (2): 269- 273. | |
| 28 |
CARCINER J M , KHIAR Y , PENA J M . Central orderings for the Newton interpolation formula[J]. BIT Numerical Mathematics, 2019, 59 (2): 371- 386.
doi: 10.1007/s10543-018-00743-2 |
| 29 |
HE F W , HUA X . Quantum algorithm for total least squares data fitting[J]. Physics Letters A, 2019, 383 (19): 2235- 2240.
doi: 10.1016/j.physleta.2019.04.037 |
| 30 | GONG X L , LIU H J , FANG J C , et al. Multi-node transfer alignment based on mechanics modeling for airborne DPOS[J]. IEEE Sensors Journal, 2017, 18 (2): 669- 679. |
| [1] | 姜颖颖, 潘树国, 叶飞, 高旺, 马春, 王浩. 基于抗差估计和改进AIME的缓变故障检测方法[J]. 系统工程与电子技术, 2022, 44(9): 2894-2902. |
| [2] | 徐庚, 何永旭, 张勇刚. 基于罗德里格斯参数的惯性系传递对准算法[J]. 系统工程与电子技术, 2022, 44(9): 2903-2913. |
| [3] | 史浩然, 卢发兴, 祁江鑫, 杨光. 基于辅助信标的无人机协同目标跟踪[J]. 系统工程与电子技术, 2022, 44(7): 2302-2310. |
| [4] | 翟光, 王妍欣, 孙一勇. 基于低轨星网的多目标协同跟踪滤波技术[J]. 系统工程与电子技术, 2022, 44(6): 1957-1967. |
| [5] | 董一平, 刘宁, 苏中, 王靖骁, 白宏阳. 基于AEKF的高速自旋飞行体组合导航方法[J]. 系统工程与电子技术, 2022, 44(6): 1977-1983. |
| [6] | 李文华, 汪立新, 沈强, 李灿, 吴宗收. 基于鲁棒EKF的MEMS-INS/GNSS/VO组合导航方法[J]. 系统工程与电子技术, 2022, 44(6): 1994-2000. |
| [7] | 王琪, 廖志忠, 燕飞. 基于概率数据关联的雷达导引头抗速度拖引干扰算法[J]. 系统工程与电子技术, 2022, 44(2): 448-454. |
| [8] | 刘艺, 周晓雄, 程广俊. 高动态跳频载波跟踪技术[J]. 系统工程与电子技术, 2022, 44(2): 677-683. |
| [9] | 孙照强, 王志贵, 孟飞, 李陆雨, 于中, 陈燕. 基于EKF及弹道方程的弹道目标跟踪滤波器设计[J]. 系统工程与电子技术, 2022, 44(10): 3207-3212. |
| [10] | 张平安, 汪伟, 高敏, 王毅. SR-CH∞KF用于弹丸飞行姿态测量研究[J]. 系统工程与电子技术, 2022, 44(1): 262-269. |
| [11] | 袁赫良, 金天, 曲家庆, 吕红丽. 旋转条件下非连续卫星导航信号处理技术[J]. 系统工程与电子技术, 2021, 43(9): 2573-2580. |
| [12] | 孙淑光, 温启新. 基于高程异常补偿的飞机终端区组合导航高度优化算法[J]. 系统工程与电子技术, 2021, 43(9): 2612-2619. |
| [13] | 文者, 卞鸿巍, 马恒, 臧涛. 中低纬度下惯导极区性能模拟测试方法[J]. 系统工程与电子技术, 2021, 43(9): 2620-2627. |
| [14] | 赵跃新, 齐望东, 刘鹏, 袁恩, 徐兵. 三维AoA目标跟踪的二次约束卡尔曼滤波算法[J]. 系统工程与电子技术, 2021, 43(8): 2263-2272. |
| [15] | 李春辉, 马健, 杨永建, 肖冰松, 邓有为, 盛涛. 基于修正的自适应平方根容积卡尔曼滤波算法[J]. 系统工程与电子技术, 2021, 43(7): 1824-1830. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||