
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (1): 230-243.doi: 10.12305/j.issn.1001-506X.2025.01.24
刘金鑫, 盛蔚, 张玉民
收稿日期:2024-01-24
出版日期:2025-01-21
发布日期:2025-01-25
通讯作者:
盛蔚
作者简介:刘金鑫(2000—), 男, 硕士研究生, 主要研究方向为无人机编队控制Jinxin LIU, Wei SHENG, Yumin ZHANG
Received:2024-01-24
Online:2025-01-21
Published:2025-01-25
Contact:
Wei SHENG
摘要:
针对无人机运动约束下的编队任务研究标准二阶一致性控制算法的优化问题。首先, 结合编队信息, 基于虚拟结构法思想, 设计含虚拟参考点的二阶一致性编队控制算法, 使得编队收敛于指定队形, 解决标准二阶一致性控制算法的收敛状态与各无人机初值有关以及收敛位置趋于一致的问题, 得到编队渐近收敛的条件。其次, 引入饱和函数得到运动约束条件下的渐近收敛的二阶一致性编队控制算法, 设计无人机编队高度、航向、速度通道控制器。最后, 设计无人机编队队形集结仿真实验, 对比相同饱和函数不同一致性方法的编队控制算法、相同一致性方法不同饱和函数的编队控制算法, 验证了优化算法的有效性和快速性。
中图分类号:
刘金鑫, 盛蔚, 张玉民. 基于运动约束的无人机编队一致性优化算法[J]. 系统工程与电子技术, 2025, 47(1): 230-243.
Jinxin LIU, Wei SHENG, Yumin ZHANG. Optimization algorithm for UAV formation consensus based on motion constraint[J]. Systems Engineering and Electronics, 2025, 47(1): 230-243.

图1
坐标转换示意图"
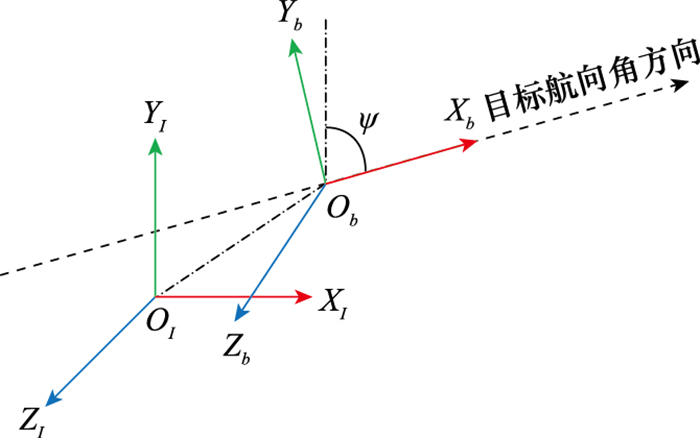
表1
编队收敛时间与迭代次数"
| 仿真组别 | 收敛时间/s | 迭代次数 |
| 仿真(I) | 107.777 | 5 389 |
| 仿真(II) | 109.798 | 5 490 |
| 仿真(III) | 95.180 | 4 759 |
| 仿真(IV) | 98.773 | 4 939 |

图2
编队内各无人机的XOY平面飞行轨迹"

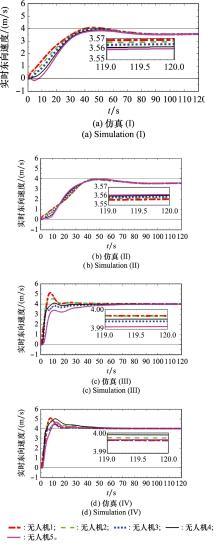
图3
编队内各无人机的实时东向速度曲线"

表2
第120 s时编队内各无人机的实时状态"
| 仿真组别 | 编队内各无人机的实时位置/m | 编队内各无人机的实时东向速度和北向速度/(m/s) | 编队内各无人机的实时航向角/(°) |
| 仿真(I) | |||
| 仿真(II) | |||
| 仿真(Ⅲ) | |||
| 仿真(Ⅳ) |
表3
第120 s时编队内各无人机实时状态与其理想状态的误差"
| 仿真组别 | 编队内各无人机的实时位置与其理想位置的误差/m | 编队内各无人机的实时东向速度和北向速度与各自理想速度的误差/(m/s) | 编队内各无人机实时航向角与其理想航向角误差/(°) |
| 仿真(I) | |||
| 仿真(II) | |||
| 仿真(Ⅲ) | |||
| 仿真(Ⅳ) |

图4
对比仿真中5架无人机的东向相对位置误差曲线"
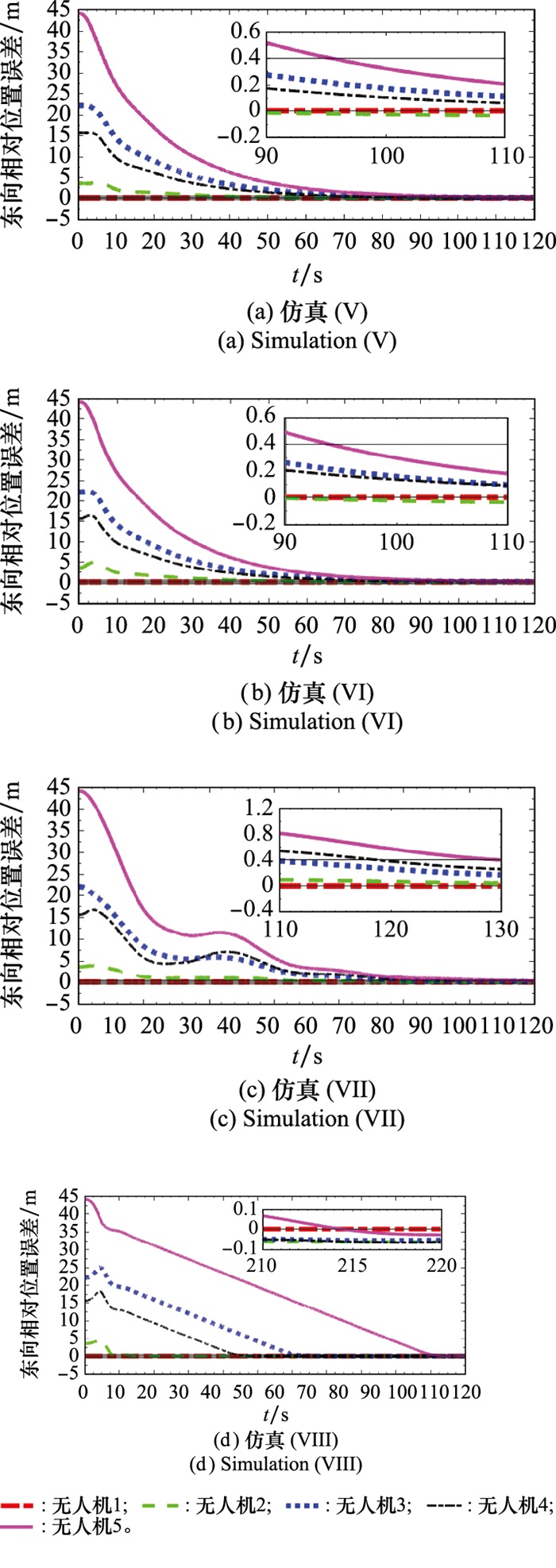

图5
对比仿真中5架无人机的北向相对位置误差曲线"


图6
对比仿真中5架无人机的实时东向速度曲线"


图7
对比仿真中5架无人机的实时北向速度曲线"
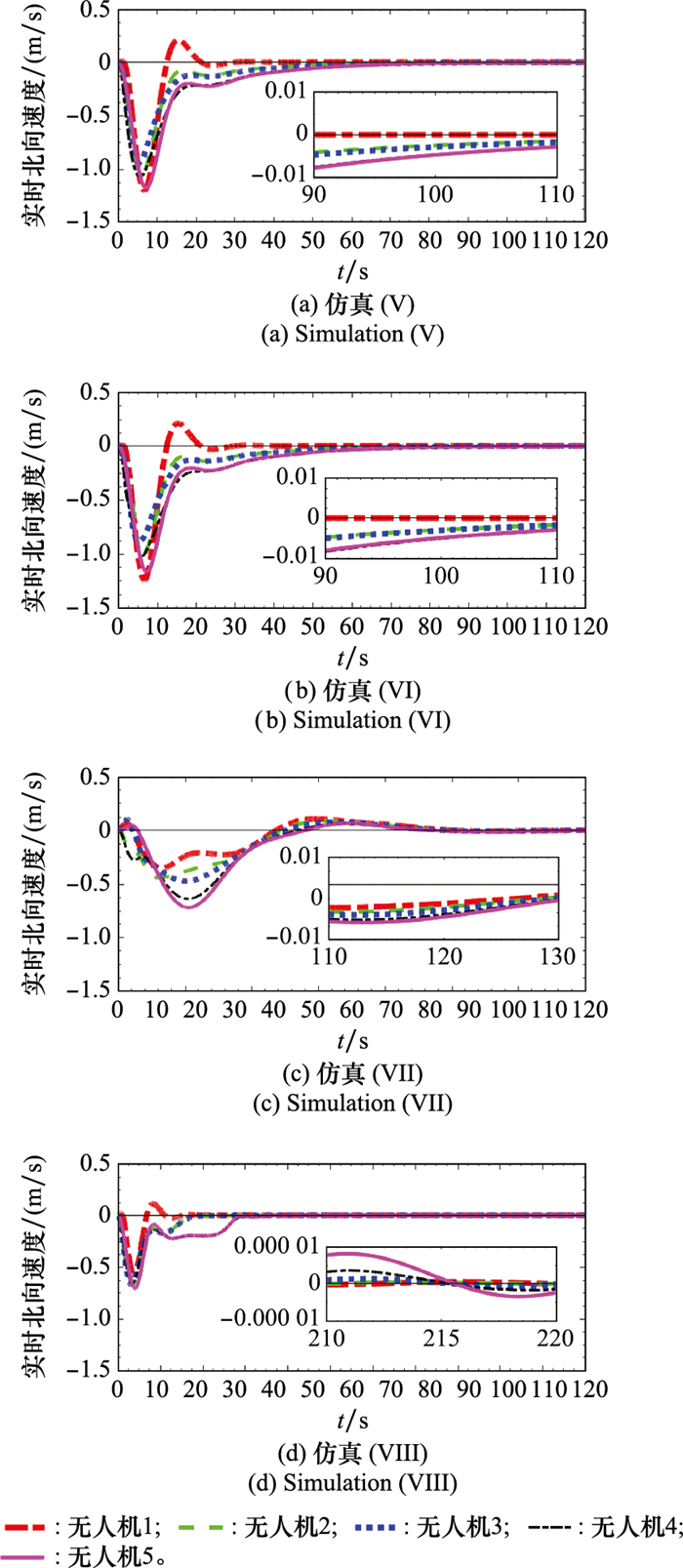
表4
编队内各无人机在编队收敛时刻的理想位置"
| 仿真组别 | 编队收敛时间/s | 编队收敛迭代次数 | 编队内各无人机的实时理想位置/m |
| 仿真(V) | 95.378 0 | 4 769 | |
| 仿真(VI) | 93.971 0 | 4 699 | |
| 仿真(VII) | 129.630 | 6 482 | |
| 仿真(VIII) | 201.530 | 10 077 |
表5
编队内各无人机在编队收敛时刻的实时状态"
| 仿真组别 | 编队收敛时间/s | 编队收敛迭代次数 | 编队内各无人机的实时位置/m | 编队内各无人机的实时东向速度和北向速度/(m/s) | 编队内各无人机的实时航向角/(°) |
| 仿真(V) | 95.378 0 | 4 769 | |||
| 仿真(VI) | 93.971 0 | 4 699 | |||
| 仿真(VII) | 129.630 | 6 482 | |||
| 仿真(VIII) | 201.530 | 10 077 |
表6
编队内各无人机在编队收敛时刻的实时状态与其理想状态的误差"
| 仿真组别 | 编队收敛时间/s | 编队收敛迭代次数 | 编队内各无人机的实时位置与其理想位置的误差/m | 编队内各无人机的实时东向速度和北向速度与各自理想速度的误差/(m/s) | 编队内各无人机的实时航向角与其理想航向角的误差/(°) |
| 仿真(V) | 95.378 0 | 4 769 | |||
| 仿真(VI) | 93.971 0 | 4 699 | |||
| 仿真(VII) | 129.630 | 6 482 | |||
| 仿真(VIII) | 201.530 | 10 077 |
| 1 |
VLADIMIRD.Cooperative path planning of unmanned aerial vehicles[J].Journal of Guidance, Control, and Dynamics,2011,34(5):1601-1602.
doi: 10.2514/1.54851 |
| 2 |
RENW,BEARDR W.Consensus seeking in multiagent systems under dynamically changing interaction topologies[J].IEEE Trans.on Automatic Control,2005,50(5):655-661.
doi: 10.1109/TAC.2005.846556 |
| 3 |
MOREAUL.Stability of multi-agent systems with time-depen-dent communication links[J].IEEE Trans.on Automatic Control,2005,50(2):169-182.
doi: 10.1109/TAC.2004.841888 |
| 4 |
KURIKIY,NAMERIKAWAT.Formation control with collision avoidance for a multi-UAV system using decentralized MPC and consensus-based control[J].SICE Journal of Control, Measurement, and System Integration,2015,8(4):285-294.
doi: 10.9746/jcmsi.8.285 |
| 5 |
GHOMMAMJ,LUQUE-VEGAL F,CASTILLO-TOLEDOB,et al.Three-dimensional distributed tracking control for multiple quadrotor helicopters[J].Journal of the Franklin Institute,2016,353(10):2344-2372.
doi: 10.1016/j.jfranklin.2016.04.003 |
| 6 | ROJO-RODRIGUEZ1E G,GARCIA1O,OLLERVIDESE J,et al.Robust consensus-based formation flight for multiple quadrotors[J].Journal of Intelligent & Robotic Systems,2019,93(1):216-226. |
| 7 |
YUD Y,ZHOUP F,JINGY H.Optimal obstacle avoidance consensus formation control method for fixed-wing UAV with variable topology[J].Aerospace Systems,2022,5(1):75-84.
doi: 10.1007/s42401-021-00119-5 |
| 8 | REN W. Consensus based formation control strategies for multi-vehicle systems[C]//Proc. of the American Control Confe-rence, 2006: 4237-4242. |
| 9 | YANM D,ZHUX,ZHANGX X,et al.Consensus-based three-dimensional multi-UAV formation control strategy with high precision[J].Frontiers of Information Technology & Electronic Engineering,2017,18(7):968-978. |
| 10 |
WUY,GOUJ Z,HUX T,et al.A new consensus theory-based method for formation control and obstacle avoidance of UAVs[J].Aerospace Science and Technology,2020,107,106332.
doi: 10.1016/j.ast.2020.106332 |
| 11 |
YANGT,MENGZ Y,DIMAROGONASD V,et al.Global consensus for discrete-time multi-agent systems with input satu- ration constraints[J].Automatica,2014,50(2):499-506.
doi: 10.1016/j.automatica.2013.11.008 |
| 12 |
SHEND,XUJ X.Distributed learning consensus for heterogenous high-order nonlinear multi-agent systems with output constraints[J].Automatica,2018,97,64-72.
doi: 10.1016/j.automatica.2018.07.030 |
| 13 |
FUJ J,WANY,WENG H,et al.Distributed robust global containment control of second-order multiagent systems with input saturation[J].IEEE Trans.on Control of Network Systems,2019,6(4):1426-1437.
doi: 10.1109/TCNS.2019.2893665 |
| 14 | 周健,龚春林,谷良贤,等.非匹配不确定性条件下的编队分布式协同控制[J].系统工程与电子技术,2019,41(3):636-642. |
| ZHOUJ,GONGC L,GUL X,et al.Distributed synchronization of leader-follower system with unmatched uncertainties[J].Systems Engineering and Electronics,2019,41(3):636-642. | |
| 15 |
LIANGY Q,DONGQ,ZHAOY J.Adaptive leader-follower formation control for swarms of unmanned aerial vehicles with motion constraints and unknown disturbances[J].Chinese Journal of Aeronautics,2020,33(11):2972-2988.
doi: 10.1016/j.cja.2020.03.020 |
| 16 |
QID,HUJ H,LIANGX L,et al.Research on consensus of multi-agent systems with and without input saturation constraints[J].Journal of Systems Engineering and Electronics,2021,32(4):947-955.
doi: 10.23919/JSEE.2021.000081 |
| 17 |
XUB,WANGZ Y,SHENH.Distributed predictive formation control for autonomous underwater vehicles under dynamic switching topology[J].Ocean Engineering,2022,262,112240.
doi: 10.1016/j.oceaneng.2022.112240 |
| 18 | 苟进展,吴宇,邓嘉宁.基于群智能-一致性理论的无人机编队全过程飞行航迹规划方法[J].控制与决策,2023,38(5):1464-1472. |
| GOUJ Z,WUY,DENGJ N.Swarm intelligence and consensus theory based trajectory planning for a complete flight of UAV formation[J].Control and Decision,2023,38(5):1464-1472. | |
| 19 |
YANGY,LIR,HUANGJ S,et al.Distributed optimal output feedback consensus control for nonlinear Euler-Lagrange systems under input saturation[J].Journal of the Franklin Institute,2023,360(8):5857-5877.
doi: 10.1016/j.jfranklin.2023.03.042 |
| 20 |
WANGG,ZUOZ Y,WANGC L.Robust consensus control of second-order uncertain multiagent systems with velocity and input constraints[J].Automatica,2023,157,111226.
doi: 10.1016/j.automatica.2023.111226 |
| 21 |
SUJ C,WANGS,WANGY N.Group consensus for competitive multiagent systems with input saturation and intermittent communication using current and outdated states[J].Neurocomputing,2023,560,126846.
doi: 10.1016/j.neucom.2023.126846 |
| 22 |
WANQ,CAOL,PANY N,et al.Improved prescribed performance fuzzy control for nonlinear multiagent systems with actuator faults and dual input saturations[J].European Journal of Control,2024,75,100937.
doi: 10.1016/j.ejcon.2023.100937 |
| 23 |
CONGY Z,DUH B,LIUB B,et al.Distributed constrained finite-time consensus algorithm for second-order multi-agent systems[J].Information Sciences,2023,626,773-786.
doi: 10.1016/j.ins.2023.01.080 |
| 24 |
JIJ W,ZHANGZ C,ZUOZ Q,et al.Event-triggered global consensus of second-order multi-agent systems with asymmetric input saturation[J].Neurocomputing,2024,574,127287.
doi: 10.1016/j.neucom.2024.127287 |
| 25 |
熊涛,曹科才,柴运,等.基于输入约束一致性算法的多无人机编队控制[J].计算机工程与应用,2018,54(12):51-56, 125.
doi: 10.3778/j.issn.1002-8331.1704-0458 |
|
XIONGT,CAOK C,CHAIY,et al.Consensus algorithm with input constraint based formation control for multiple UAVs[J].Computer Engineering and Applications,2018,54(12):51-56, 125.
doi: 10.3778/j.issn.1002-8331.1704-0458 |
|
| 26 | 胡锦帆.基于虚拟领航者的无人机一致性编队控制[J].电子测量技术,2023,46(22):70-77. |
| HUJ F.Consensus control for UAV formation with virtual leader based[J].Computer Engineering and Applications,2023,46(22):70-77. | |
| 27 |
MAX Y,LIUJ K.Consensus control for multi-agent systems with input constraints based on disturbance observer[J].Journal of the Franklin Institute,2024,361,106604.
doi: 10.1016/j.jfranklin.2024.01.005 |
| 28 |
LUM Y,WUJ,ZHANX S,et al.Consensus of second-order heterogeneous multi-agent systems with and without input satu- ration[J].ISA Transactions,2022,126,14-20.
doi: 10.1016/j.isatra.2021.08.001 |
| 29 |
CHENY B,YUJ Q,MEIY S,et al.Trajectory optimization of multiple quad-rotor UAVs in collaborative assembling task[J].Chinese Journal of Aeronautics,2016,29(1):184-201.
doi: 10.1016/j.cja.2015.12.008 |
| 30 |
ZHANGX W,SHENH M,XIEG H,et al.Decentralized motion planning for multi quadrotor with obstacle and collision avoidance[J].International Journal of Intelligent Robotics and Applications,2021,5(2):176-185.
doi: 10.1007/s41315-021-00183-2 |
| 31 |
CUMINT B,BELLINGHAMJ G.Autonomous oceanographic sampling networks[J].Oceanography,1993,6(3):86-94.
doi: 10.5670/oceanog.1993.03 |
| [1] | 杨波, 刘枫, 薛亮, 刘云峰. 基于运动约束的航姿系统误差自主补偿方法[J]. 系统工程与电子技术, 2024, 46(6): 2099-2106. |
| [2] | 郝文康, 陈琪锋. 无人机编队模糊约束分布式模型预测节能控制[J]. 系统工程与电子技术, 2024, 46(3): 1021-1030. |
| [3] | 孙田野, 孙伟, 吴建军. 改进Quatre算法的无人机编队快速集结方法[J]. 系统工程与电子技术, 2022, 44(9): 2840-2848. |
| [4] | 符小卫, 陈子浩. 基于一致性协议的多无人机协同围捕控制方法[J]. 系统工程与电子技术, 2021, 43(9): 2501-2507. |
| [5] | 权婉珍, 罗哲, 杨小冈, 韩心中, 席建祥. 间歇通信条件下多无人机保性能编队追踪控制[J]. 系统工程与电子技术, 2021, 43(11): 3288-3294. |
| [6] | 符小卫, 陈子浩. 多无人机协同探测快速目标的控制方法设计[J]. 系统工程与电子技术, 2021, 43(11): 3295-3304. |
| [7] | 吴立尧, 韩维, 张勇, 熊瑶. 有人/无人机编队指挥控制系统结构设计[J]. 系统工程与电子技术, 2020, 42(8): 1826-1834. |
| [8] | 吴立尧, 韩维, 张勇, 熊瑶. 基于人机合作的有人/无人机编队队形变换策略[J]. 系统工程与电子技术, 2020, 42(2): 434-444. |
| [9] | 毛琼, 李小民, 王正军. 基于规则的无人机编队队形构建与重构控制方法[J]. 系统工程与电子技术, 2019, 41(5): 1118-1126. |
| [10] | 林君灿, 贾高伟, 侯中喜. 异构UAV编队反雷达作战中任务分配方法[J]. 系统工程与电子技术, 2018, 40(9): 1986-1992. |
| [11] | 李响, 邢清华, 董涛. 基于多指标正交实验设计的UAV编队配系优化[J]. Journal of Systems Engineering and Electronics, 2013, 35(2): 331-337. |
| [12] | 刘跃峰, 张安. 有人机/无人机编队协同任务分配方法[J]. Journal of Systems Engineering and Electronics, 2010, 32(3): 584-587. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||