
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (12): 4183-4191.doi: 10.12305/j.issn.1001-506X.2024.12.27
• 制导、导航与控制 • 上一篇
张寿健1,2, 桂明臻1,2,*
收稿日期:2024-01-30
出版日期:2024-11-25
发布日期:2024-12-30
通讯作者:
桂明臻
作者简介:张寿健 (2002—), 男, 硕士研究生, 主要研究方向为天文导航与机器学习基金资助:Shoujian ZHANG1,2, Mingzhen GUI1,2,*
Received:2024-01-30
Online:2024-11-25
Published:2024-12-30
Contact:
Mingzhen GUI
摘要:
在以太阳作为目标源的天文测速导航中,多普勒速度量测量存在较多野值误差,严重影响导航精度。对此,提出一种基于高斯过程回归与无迹卡尔曼滤波(Gaussian process regression and unscented Kalman filtering,GPR-UKF)的野值检测修复方法,建立速度量测量的动态预测模型。此外,还针对不同参数对模型精度的影响进行研究。经仿真验证,所提方法效果显著优于传统野值处理方法。
中图分类号:
张寿健, 桂明臻. 基于GPR-UKF的天文测角/测速组合导航方法[J]. 系统工程与电子技术, 2024, 46(12): 4183-4191.
Shoujian ZHANG, Mingzhen GUI. Navigation method using angle/velocity measurement based on GPR-UKF[J]. Systems Engineering and Electronics, 2024, 46(12): 4183-4191.

图1
星光角距测量"


图2
多普勒速度测量"


图3
野值检测修复流程图"


图4
综合野值(含单点野值和连续野值)"


图5
传统导航结果(不含野值)"


图6
传统导航结果(含单点野值和连续野值)"
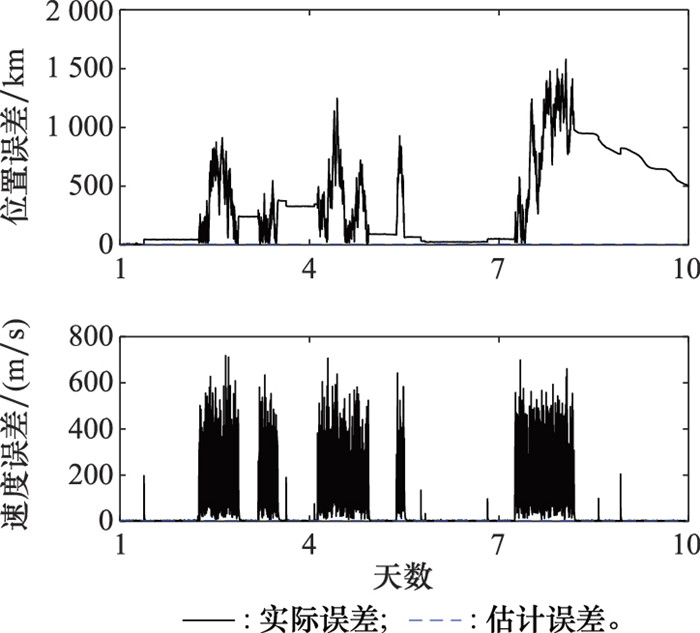
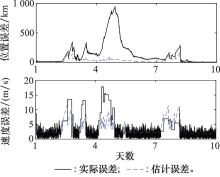
图7
传统野值处理方法导航结果"

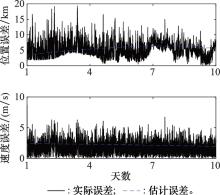
图8
GPR-UKF野值处理导航结果"

表1
各类方法导航误差比较"
| 不同方法 | 导航位置误差均值/km | 导航最大位置误差/km | 导航速度误差均值/(m/s) | 导航最大速度误差/(m/s) |
| 不含野值 | 5.304 0 | 19.187 0 | 1.857 9 | 8.660 0 |
| 含野值不处理 | 362.000 0 | 1 580.200 0 | 63.706 0 | 718.336 6 |
| 传统野值处理 | 146.040 0 | 947.060 0 | 3.849 7 | 17.815 7 |
| GPR野值处理 | 5.807 8 | 19.344 0 | 1.858 1 | 8.660 0 |

图9
初始训练样本点数为200时的导航结果"


图10
初始训练样本点数为300时的导航结果"


图11
初始训练样本个数为400时的导航结果"

表2
不同初始训练样本数下的导航误差比较"
| 初始训练样本点数 | 导航位置误差均值/km | 导航最大位置误差/km | 导航速度误差均值/(m/s) | 导航最大速度误差/(m/s) |
| 200 | 11.834 | 75.436 | 1.933 | 8.660 |
| 300 | 11.123 | 30.121 | 1.861 | 8.660 |
| 400 | 6.610 | 19.188 | 1.858 | 8.660 |

图12
动态训练样本数为200时的导航结果"
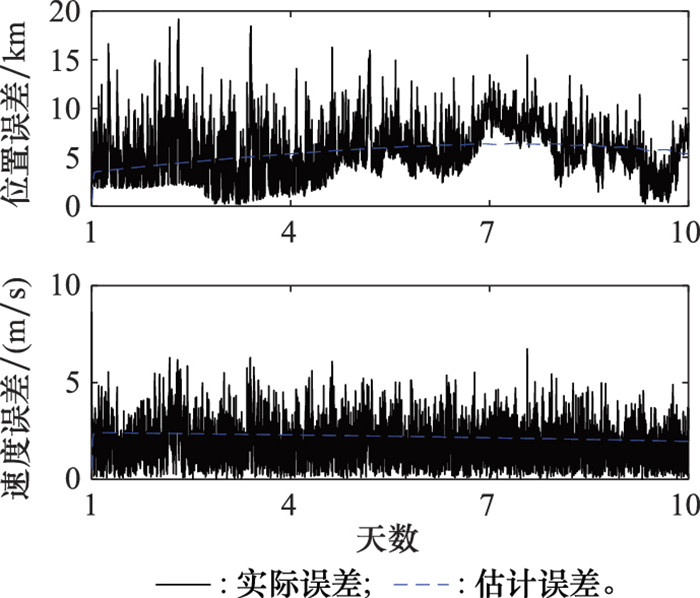

图13
动态训练样本数为300时的导航结果"


图14
动态训练样本数为400时的导航结果"

表3
不同动态训练样本点数下的导航误差比较"
| 动态训练样本点数 | 导航位置误差均值/km | 导航最大位置误差/km | 导航速度误差均值/(m/s) | 导航最大速度误差/(m/s) |
| 200 | 5.648 4 | 19.188 | 1.858 1 | 8.660 0 |
| 300 | 6.953 2 | 19.235 | 1.858 5 | 8.660 0 |
| 400 | 7.100 0 | 19.469 | 1.858 5 | 8.660 0 |
| 1 |
FARAHANIFAR M , ASSADIAN N . Integrated magnetometer-horizon sensor low-Earth orbit determination using UKF[J]. Acta Astronautica, 2015, 106, 13- 23.
doi: 10.1016/j.actaastro.2014.10.007 |
| 2 | 宁晓琳, 杨雨青, 房建成, 等. 深空探测器自主天文导航研究进展[J]. 深空探测学报(中英文), 2023, 10 (2): 99- 108. |
| NING X L , YANG Y Q , FANG J C , et al. The progress of autonomous celestial navigation for deep space spacecraft[J]. Journal of Deep Space Exploration, 2023, 10 (2): 99- 108. | |
| 3 | 强祺昌, 林宝军, 刘迎春, 等. 深空探测自主导航技术综述[J]. 导航与控制, 2023, 22 (1): 19- 32. |
| QIANG Q C , LIN B J , LIU Y C , et al. Review of autonomous navigation technology for deep space exploration[J]. Navigation and Control, 2023, 22 (1): 19- 32. | |
| 4 | ZHANG W , YANG Y , YOU W , et al. Autonomous navigation method and technology implementation of high-precision solar spectral velocity measurement[J]. Science China Physics, Mechanics & Astronomy, 2022, 65 (8): 289606. |
| 5 | MITCHELL J W, HASSOUNEH M, WINTERNITZ L, et al. SEXTANT-station explorer for X-ray timing and navigation technology[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2015. |
| 6 | HANSON J E . Principles of X-ray navigation[M]. Palo Alto: Stanford University, 1996. |
| 7 | CHESTER T J, BUTMAN S A. Navigation using X-ray pulsars, NASA technical reports N81-27129[R]. Pasadena: Jet Propulsion Laboratory, 1981. |
| 8 | DOWNS G S. Interplanetary navigation using pulsating radio sources, NASA technical reports N74-34150[R]. Pasadena: Jet Propulsion Laboratory, 1974. |
| 9 |
SHEIKH S I , PINES D J , RAY P S , et al. Spacecraft navigation using X-ray pulsars[J]. Journal of Guidance, Control, and Dynamics, 2006, 29 (1): 49- 63.
doi: 10.2514/1.13331 |
| 10 | SHEIKH S I , PINES D J , RAY P S , et al. The use of X-ray pulsars for spacecraft navigation[J]. Advances in the Astronautical Science, 2005, 119 (1): 105- 119. |
| 11 | SHEIKH S I . The use of variable celestial X-ray sources for spacecraft navigation[M]. Baltimore: University of Maryland, 2005. |
| 12 | GENDREAU K C, ARZOUMANIAN Z, OKAJIMA T. The Neutron star interior composition explore R(NICER): an explorer mission of opportunity for soft X-ray timing spectroscopy[C]//Proc. of the X-Ray Binary Systems (BeXRB) Workshop, 2012. |
| 13 | 郑伟, 王禹淞, 姜坤, 等. X射线脉冲星导航方法研究综述[J]. 航空学报, 2023, 44 (3): 527451. |
| ZHENG W , WANG Y S , JIANG K , et al. Overview of X-ray pulsarbased navigation methods[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (3): 527451. | |
| 14 |
LIU J , MA J , TIAN J W , et al. Pulsar navigation for interplanetary missions using CV model and ASUKF[J]. Aerospace Science and Technology, 2012, 22 (1): 19- 23.
doi: 10.1016/j.ast.2011.04.010 |
| 15 | 朱新岩, 史忠科. 基于残差特性分析的野值检测与剔除方法[J]. 飞行力学, 2008, 26 (6): 79- 83. |
| ZHU X Y , SHI Z K . Outlier detection method based on cha-racteristic analyzing of residue[J]. Flight Dynamics, 2008, 26 (6): 79- 83. | |
| 16 |
JULIER S J , UHLMANN J K . Unscented filtering and nonlinear estimation[J]. Proceedings of the IEEE, 2004, 92 (3): 401- 422.
doi: 10.1109/JPROC.2003.823141 |
| 17 |
NING X L , FANG J C , LIU G , et al. A novel differential Doppler measurement-aided autonomous celestial navigation method for spacecraft during approach phase[J]. IEEE Trans.on Aerospace and Electronic Systems, 2017, 53 (2): 587- 597.
doi: 10.1109/TAES.2017.2651558 |
| 18 | 黄舒颖. 面向深空探测的太阳光差分测速精度分析及导航光谱选择[D]. 长沙: 湖南大学, 2022. |
| HUANG S Y. Solar difference velocimetry accuracy analysis and navigation spectrum selection for deep space exploration[D]. Changsha: Hunan University, 2022. | |
| 19 |
FANG C , HIEI E , OKAMOTO T . CaⅡ K line asymmetries in two well-observed solar flares of october 18, 1990[J]. Solar Physics, 1991, 135 (1): 89- 97.
doi: 10.1007/BF00146700 |
| 20 |
ICHIMOTO K , KUROKAWA H . Hα red asymmetry of solar flares[J]. Solar Physics, 1984, 93 (1): 105- 121.
doi: 10.1007/BF00156656 |
| 21 |
HUANG S Y , KANG Z W , LIU J , et al. Accuracy analysis of spectral velocimetry for the solar Doppler difference navigation[J]. IEEE Access, 2021, 9, 78075- 78082.
doi: 10.1109/ACCESS.2021.3079500 |
| 22 |
CHEN X , SUN Z W , ZHANG W , et al. A novel autonomous celestial integrated navigation for deep space exploration based on angle and stellar spectra shift velocity measurement[J]. Sensors, 2019, 19 (11): 2555.
doi: 10.3390/s19112555 |
| 23 |
GREC G , FOSSAT E , POMERANTZ M . Solar oscillations: full disk observations from the geographic south pole[J]. Nature, 1980, 288 (5791): 541- 544.
doi: 10.1038/288541a0 |
| 24 | YIM J R. Autonomous spacecraft orbit navigation[D]. Texas: Texas A&M University, 2002. |
| 25 |
YE W , LIU Z C , LI C , et al. Enhanced Kalman filter using noisy input Gaussian process regression for bridging GPS outages in a POS[J]. Journal of Navigation, 2018, 71 (3): 565- 584.
doi: 10.1017/S0373463317000819 |
| 26 |
QUAN W , FANG J C , XU F , et al. Hybrid simulation system study of SINS/CNS integrated navigation[J]. IEEE Aerospace and Electronic Systems Magazine, 2008, 23 (2): 17- 24.
doi: 10.1109/MAES.2008.4460727 |
| 27 |
MA X , NING X L , FANG J C . Analysis of orbital dynamic equation in navigation for a Mars gravity-assist mission[J]. Journal of Navigation, 2012, 65 (3): 531- 548.
doi: 10.1017/S0373463312000100 |
| 28 |
NING X L , LI Z , YANG Y Q , et al. Analysis of ephemeris errors in autonomous celestial navigation during Mars approach phase[J]. Journal of Navigation, 2017, 70 (3): 505- 526.
doi: 10.1017/S0373463316000734 |
| 29 | YIM J R, CRASSIDIS J L, JUNKINS J L. Autonomous orbit navigation of interplanetary spacecraft[C]//Proc. of the AIAA/AAS Astrodynamics Specialist Conference, 2000. |
| 30 | 荆蕾, 孙炜玮, 乔玉新, 等. GNSS/SINS组合导航系统的自适应UKF算法[J]. 大地测量与地球动力学, 2023, 43 (3): 255- 258. |
| JING L , SUN W W , QIAO Y X , et al. Adaptive UKF algorithm for GNSS/SINS integrated navigation system[J]. Journal of Geodesy and Geodynamics, 2023, 43 (3): 255- 258. |
| [1] | 刘学浩, 刘文学, 杨超三, 祝文晶, 宋玉, 李金海. 基于GPR模型的用户量预测优化方法[J]. 系统工程与电子技术, 2024, 46(8): 2721-2729. |
| [2] | 张冬, 邢福逸, 徐允鹤, 钱鹏. 基于双模式切换的机载惯性/雷达组合导航方法[J]. 系统工程与电子技术, 2024, 46(8): 2770-2778. |
| [3] | 靳凯迪, 柴洪洲, 宿楚涵. DVL/SINS松紧组合的等价性分析及改进的虚拟波束辅助紧组合算法[J]. 系统工程与电子技术, 2024, 46(6): 2107-2116. |
| [4] | 冷悦, 钟胜. 天文/惯性组合系统中重力扰动补偿方法[J]. 系统工程与电子技术, 2024, 46(4): 1357-1363. |
| [5] | 李新宇, 周召发, 张志利, 郝诗文, 梁哲. 基于SINS/OD失准角观测的垂线偏差测量方法[J]. 系统工程与电子技术, 2024, 46(3): 1067-1074. |
| [6] | 张然, 刘天宇, 金光. 基于核自构建-高斯过程回归的锂离子电池剩余使用寿命预测[J]. 系统工程与电子技术, 2023, 45(8): 2623-2633. |
| [7] | 靳凯迪, 柴洪洲, 宿楚涵, 向民志, 李明. 基于状态变换卡尔曼滤波的DVL/SINS组合导航算法[J]. 系统工程与电子技术, 2023, 45(11): 3624-3631. |
| [8] | 唐洪琼, 许江宁, 史文策, 何泓洋, 李方能. 基于位置观测信息的Davenport四元数DVL标定方法[J]. 系统工程与电子技术, 2023, 45(11): 3640-3648. |
| [9] | 朱天高, 刘勇, 李开龙, 赵仁杰. 基于欧拉角的李群捷联惯导误差模型分析与比较研究[J]. 系统工程与电子技术, 2023, 45(10): 3265-3273. |
| [10] | 高利春, 高铭阳, 陈晓芳, 饶建兵, 费泽松, 倪少杰. 基于SINS/GBAS组合导航的高精度进近着陆导航技术[J]. 系统工程与电子技术, 2023, 45(1): 210-220. |
| [11] | 姜颖颖, 潘树国, 叶飞, 高旺, 马春, 王浩. 基于抗差估计和改进AIME的缓变故障检测方法[J]. 系统工程与电子技术, 2022, 44(9): 2894-2902. |
| [12] | 翟光, 王妍欣, 孙一勇. 基于低轨星网的多目标协同跟踪滤波技术[J]. 系统工程与电子技术, 2022, 44(6): 1957-1967. |
| [13] | 董一平, 刘宁, 苏中, 王靖骁, 白宏阳. 基于AEKF的高速自旋飞行体组合导航方法[J]. 系统工程与电子技术, 2022, 44(6): 1977-1983. |
| [14] | 李文华, 汪立新, 沈强, 李灿, 吴宗收. 基于鲁棒EKF的MEMS-INS/GNSS/VO组合导航方法[J]. 系统工程与电子技术, 2022, 44(6): 1994-2000. |
| [15] | 孙淑光, 温启新. 基于高程异常补偿的飞机终端区组合导航高度优化算法[J]. 系统工程与电子技术, 2021, 43(9): 2612-2619. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||