
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (12): 4157-4164.doi: 10.12305/j.issn.1001-506X.2024.12.24
• 制导、导航与控制 • 上一篇
张海阔, 孟秀云
收稿日期:2024-01-15
出版日期:2024-11-25
发布日期:2024-12-30
通讯作者:
张海阔
作者简介:张海阔 (1999—), 男, 硕士研究生, 主要研究方向为飞行器任务规划Haikuo ZHANG, Xiuyun MENG
Received:2024-01-15
Online:2024-11-25
Published:2024-12-30
Contact:
Haikuo ZHANG
摘要:
针对快速扩展随机树(rapidly-exploring random tree, RRT)*算法应用于无人机(unmanned aerial vehicle, UAV)航迹规划时采样效率低、收敛速度慢、航迹代价大的问题, 采用势场法引导树扩展加快算法收敛速度。采用优化算法重选父节点及重新布线,生成比RRT*算法代价更小的初始航迹。基于初始航迹构建启发式采样区域,以更有效地优化初始航迹, 给出一种改进RRT*算法; 基于模型预测控制, 设计航迹规划策略, UAV在飞行中能良好地应对环境中的动态威胁。数学仿真实验结果表明, 改进算法能快速地生成代价更小的初始航迹, 并在后续航迹优化的过程中更有效地减少航迹代价, 可被应用于无人机在线规划任务。
中图分类号:
张海阔, 孟秀云. 基于改进RRT*算法的无人机在线航迹规划[J]. 系统工程与电子技术, 2024, 46(12): 4157-4164.
Haikuo ZHANG, Xiuyun MENG. UAV online trajectory planning based on improved RRT* algorithm[J]. Systems Engineering and Electronics, 2024, 46(12): 4157-4164.

图1
环境模型"


图2
重选父节点过程"


图3
重新布线过程"


图4
树的扩展过程"


图5
三角不等式示意图"


图6
重选父节点过程优化"


图7
重新布线过程优化"


图8
采样区域"


图9
输出量"


图10
控制量"


图11
规划策略示意图"

表1
无人机参数设置"
| 无人机约束 | 数值 |
| 最大俯冲角/(°) | 10 |
| 最大转弯角/(°) | 30 |
| 最大爬升角/(°) | 10 |
| 飞行高度约束/km | 0.05 |
| 最小航迹段约束/km | 6 |
表2
RRT*与W-RRT*算法的仿真结果"
| 算法 | 平均航迹代价 | 平均树节点个数 | 平均运行时间/s |
| RRT* | 162.52 | 978.4 | 6.17 |
| W-RRT* | 151.94 | 486.8 | 1.06 |

图12
RRT*算法规划初始航迹"


图13
W-RRT*算法规划初始航迹"


图14
RRT*算法规划的初始航迹"

表3
3种算法针对初始航迹改善的仿真结果"
| 算法 | 初始航迹代价 | 优化后航迹代价均值 | 改善初始航迹成功率/% |
| RRT* | 151.51 | 151.38 | 51.23 |
| Informed RRT* | 151.51 | 150.17 | 65.78 |
| C-RRT* | 151.51 | 142.73 | 100.00 |

图15
RRT*算法采样区域"


图16
Informed RRT*算法启发式采样区域"

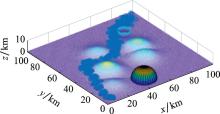
图17
C-RRT*算法启发式采样区域"


图18
3种算法针对初始航迹改善的效果对比"


图19
在线航迹规划仿真"

| 1 |
DOSHI A A , POSTULA A J , FLETCHER A , et al. Development of micro-UAV with integrated motion planning for open-cut mining surveillance[J]. Microprocessors and Microsystems, 2015, 39 (8): 829- 835.
doi: 10.1016/j.micpro.2015.07.008 |
| 2 |
POŁKA M , PTAK S , ŁUKASZ K . The use of UAV's for search and rescue operations[J]. Procedia Engineering, 2017, 192, 748- 752.
doi: 10.1016/j.proeng.2017.06.129 |
| 3 | IVUSHKIN K, BARTHOLOMEUS H, BREGT A, et al. UAV based soil salinity assessment of cropland[J]. 2018, 338: 502-512. |
| 4 |
DELMERICO J , MUEGGLER E , NITSCH J , et al. Active autonomous aerial exploration for ground robot path planning[J]. IEEE Robotics and Automation Letters, 2017, 2 (2): 664- 671.
doi: 10.1109/LRA.2017.2651163 |
| 5 | 张海阔, 孟秀云. 基于改进粒子群算法的无人机航迹规划[J]. 飞行力学, 2024, 42 (2): 29- 35. |
| ZHANG H K , MENG X Y . UAV route planning based on improved particle swarm optimization algorithm[J]. Flight Dynamics, 2024, 42 (2): 29- 35. | |
| 6 |
刘玉杰, 崔凯凯, 韩维, 等. 基于IPSO的舰载机出动离场规划研究[J]. 系统工程与电子技术, 2024, 46 (4): 1337- 1345.
doi: 10.12305/j.issn.1001-506X.2024.04.22 |
|
LIU Y J , CUI K K , HAN W , et al. Research on departure planning of carrier aircraft based on IPSO[J]. Systems Engineering and Electronics, 2024, 46 (4): 1337- 1345.
doi: 10.12305/j.issn.1001-506X.2024.04.22 |
|
| 7 | GUANGSHENG L I , CHOU W . Path planning for mobile robot using self-adaptive learning particle swarm optimization[J]. Science China (Information Sciences), 2018, 61 (5): 267- 284. |
| 8 | CAO Y , WEI W Y , BAI Y , et al. Multi-base multi-UAV cooperative reconnaissance path planning with genetic algorithm[J]. Cluster Computing, 2019, 22 (3): 5175- 5184. |
| 9 |
LI D D , WANG L , CAI J C , et al. Research on path planning of mobile robot based on improved genetic algorithm[J]. International Journal of Modeling, Simulation, and Scientific Computing, 2023, 14 (6): 2341030.
doi: 10.1142/S1793962323410301 |
| 10 | 文超, 董文瀚, 解武杰, 等. 基于CEA-GA的多无人机三维协同曲线航迹规划方法[J]. 北京航空航天大学学报, 2023, 49 (11): 3086- 3099. |
| WEN C , DONG W H , XIE W J , et al. Multi-UAVs 3D cooperative curve path planning method based on CEA-GA[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49 (11): 3086- 3099. | |
| 11 | SUN L. Path planning of mobile robot based on improved ant colony algorithm[C]//Proc. of the IEEE 11th Joint International Information Technology and Artificial Intelligence Conference, 2023: 985-989. |
| 12 |
SHEN Z P , DING W N , LIU Y C , et al. Path planning optimization for unmanned sailboat in complex marine environment[J]. Ocean Engineering, 2023, 269, 113475.
doi: 10.1016/j.oceaneng.2022.113475 |
| 13 |
MAVROVOUNIOTIS M , YANG S X . Ant algorithms with immigrants schemes for the dynamic vehicle routing problem[J]. Information Sciences, 2015, 294, 456- 477.
doi: 10.1016/j.ins.2014.10.002 |
| 14 |
FARAHBAKHSH H , POURFAR I , ARA A L . A modified artificial bee colony algorithm using accept-reject method: theory and application in virtual power plant planning[J]. IETE Journal of Research, 2023, 69 (8): 5364- 5379.
doi: 10.1080/03772063.2021.1973597 |
| 15 | MIRJALILI S , GANDOMI A H , MIRJALILI S Z , et al. Salp swarm algorithm: a bio-inspired optimizer for engineering design problems[J]. Advances in Engineering Software, 2017, 114 (1): 163- 191. |
| 16 |
宋超, 李波, 马云红, 等. 基于优化A*和MPC融合算法的三维无人机航迹规划[J]. 系统工程与电子技术, 2023, 45 (12): 3995- 4004.
doi: 10.12305/j.issn.1001-506X.2023.12.30 |
|
SONG C , LI B , MA Y H , et al. Trajectory planning based on optimized A* and MPC fusion algorithm[J]. Systems Engineering and Electronics, 2023, 45 (12): 3995- 4004.
doi: 10.12305/j.issn.1001-506X.2023.12.30 |
|
| 17 | 潘登, 郑建华, 高东. 基于二维连通图的无人机快速三维路径规划[J]. 北京航空航天大学学报, 2023, 49 (12): 3419- 3431. |
| PAN D , ZHENG J H , GAO D . Fast 3D path planning of UAV based on 2D connected graph[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49 (12): 3419- 3431. | |
| 18 |
LI S D , ZHOU H H , HU J , et al. A fast path planning approach for unmanned aerial vehicles[J]. Concurrency and Computation: Practice and Experience, 2015, 27 (13): 3446- 3460.
doi: 10.1002/cpe.3291 |
| 19 |
YU F J , SHANG H Q , ZHU Q L , et al. An efficient RRT-based motion planning algorithm for autonomous underwater vehicles under cylindrical sampling constraints[J]. Autonomous Robots, 2023, 47 (3): 281- 297.
doi: 10.1007/s10514-023-10083-y |
| 20 | CHAO N , LIU Y K , XIA H , et al. DL-RRT* algorithm for least dose path re-planning in dynamic radioactive environments[J]. Nuclear Engineering and Technology, 2018, 51 (3): 825- 836. |
| 21 | ELBANHAWI M , SIMIC M . Sampling-based robot motion planning: a review[J]. IEEE Access, 2014, 2 (1): 56- 77. |
| 22 |
KARAMAN S , FRAZZOLI E . Sampling-based algorithms for optimal motion planning[J]. The International Journal of Robotics Research, 2011, 30 (7): 846- 894.
doi: 10.1177/0278364911406761 |
| 23 | LEE D, SHIM D H. Path planner based on bidirectional spline-RRT* for fixed-wing UAVs[C]//Proc. of the International Conference on Unmanned Aircraft Systems, 2016: 77-86. |
| 24 | GAMMELL J D, SRINIVASA S S, BARFOOT T D. Informed RRT*: optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic[C]//Proc. of the International Conference on Intelligent Robots and Systems, 2014: 2997-3004. |
| 25 | QURESHI A H , AYAZ Y . Intelligent bidirectional rapidly-exploring random trees for optimal motion planning in complex cluttered environments[J]. Robotics & Autonomous Systems, 2015, 68, 1- 11. |
| 26 | ADIYATOV O, VAROL H A. Rapidly-exploring random tree based memory efficient motion planning[C]//Proc. of the Mechatronics and Automation, 2013: 354-359. |
| 27 | KAWABE T, NISHI T. A flexible collision-free trajectory planning for multiple robot arms by combining Q-learning and RRT*[C]//Proc. of the IEEE 18th International Conference on Automation Science and Engineering, 2022: 2363-2368. |
| 28 | LIU H S, GU Y Q, LI X J, et al. Deep reinforcement learning integrated RRT algorithm for path planning[C]//Proc. of the WRC Symposium on Advanced Robotics and Automation, 2023: 239-244. |
| 29 |
MAMMARELLA M , CAPELLO E , DABBENE F , et al. Sample-based SMPC for tracking control of fixed-wing UAV[J]. IEEE Control Systems Letters, 2018, 2 (4): 611- 616.
doi: 10.1109/LCSYS.2018.2845546 |
| 30 |
SANTOS M A , FERRAMOSCA A , RAFFO G V . Tube-based MPC with nonlinear control for load transportation using a UAV[J]. IFAC PapersOnLine, 2018, 51 (25): 459- 465.
doi: 10.1016/j.ifacol.2018.11.180 |
| 31 |
王晓海, 孟秀云, 李传旭. 基于MPC的无人机航迹跟踪控制器设计[J]. 系统工程与电子技术, 2021, 43 (1): 191- 198.
doi: 10.3969/j.issn.1001-506X.2021.01.23 |
|
WANG X H , MENG X Y , LI C X . Design of trajectory tracking controller for UAV based on MPC[J]. Systems Engineering and Electronics, 2021, 43 (1): 191- 198.
doi: 10.3969/j.issn.1001-506X.2021.01.23 |
| [1] | 熊子淳, 刘永善. 针对低速目标的飞行器中段航迹快速规划[J]. 系统工程与电子技术, 2024, 46(7): 2424-2436. |
| [2] | 陶灿灿, 周锐. 面向空地中继网络优化的无人机运动控制方法[J]. 系统工程与电子技术, 2024, 46(5): 1712-1723. |
| [3] | 杨登峰, 闫晓东. 基于视线协同和DMPC的载机-防御弹群协同主动防御制导策略[J]. 系统工程与电子技术, 2024, 46(5): 1724-1733. |
| [4] | 孙家玮, 余明晖, 杨大鹏, 汤皓泉, 卞大鹏. 基于CL-RRT与MPC的舰载机牵引系统路径规划[J]. 系统工程与电子技术, 2024, 46(5): 1745-1755. |
| [5] | 余婧, 吴晓军, 蒋安林, 雍恩米. 基于多精度规划窗口的无人机航迹规划方法研究[J]. 系统工程与电子技术, 2024, 46(5): 1767-1776. |
| [6] | 卜瑞宇, 王彪, 李宏成, 唐超颖, 朱日楠. 地形跟随中航迹跟踪模型预测控制方案设计[J]. 系统工程与电子技术, 2024, 46(4): 1383-1392. |
| [7] | 郝文康, 陈琪锋. 无人机编队模糊约束分布式模型预测节能控制[J]. 系统工程与电子技术, 2024, 46(3): 1021-1030. |
| [8] | 胡树欣, 张安, 孙嫚憶, 李铭浩. 基于一致性理论和S-MPC的四旋翼编队协同避障[J]. 系统工程与电子技术, 2024, 46(2): 658-667. |
| [9] | 刘玉杰, 李樾, 韩维, 崔凯凯. 基于改进凸优化算法的多机编队突防航迹规划[J]. 系统工程与电子技术, 2023, 45(9): 2819-2830. |
| [10] | 张宏, 吴云华, 钟胜钧, 郭海波. 基于反步法的空间目标复合指向控制方法研究[J]. 系统工程与电子技术, 2023, 45(9): 2884-2893. |
| [11] | 徐文丰, 李颖晖, 裴彬彬, 禹志龙. 基于多模型MPC的变体飞机协调优化控制[J]. 系统工程与电子技术, 2023, 45(9): 2902-2911. |
| [12] | 陈子豪, 李娟, 刘畅, 李杰, 刘笑宇. 时间约束下对地面目标协同攻击任务规划方法[J]. 系统工程与电子技术, 2023, 45(8): 2353-2360. |
| [13] | 权申明, 王松艳, 晁涛, 杨明. 基于改进人工势场法的再入制导方法[J]. 系统工程与电子技术, 2023, 45(7): 2158-2169. |
| [14] | 吴立尧, 苏析超, 王垒, 潘子双. 有人/无人机编队队形集结控制研究[J]. 系统工程与电子技术, 2023, 45(7): 2192-2202. |
| [15] | 王庆禄, 吴冯国, 郑成辰, 李辉. 基于优化人工势场法的无人机航迹规划[J]. 系统工程与电子技术, 2023, 45(5): 1461-1468. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||