
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (11): 3883-3892.doi: 10.12305/j.issn.1001-506X.2024.11.30
姜丽敏, 陈曙暄, 路坤峰
收稿日期:2023-08-17
出版日期:2024-10-28
发布日期:2024-11-30
通讯作者:
陈曙暄
作者简介:姜丽敏(1985—), 女, 高级工程师, 博士, 主要研究方向为导航、制导与控制基金资助:Limin JIANG, Shuxuan CHEN, Kunfeng LU
Received:2023-08-17
Online:2024-10-28
Published:2024-11-30
Contact:
Shuxuan CHEN
摘要:
针对高速飞行器模型参数不确定和外界干扰对飞行控制系统的影响, 提出一种基于干扰观测器(disturbance observer, DOB) 的主动抗干扰控制方法。所提方法将外部干扰和模型不确定性造成的实际对象与标称模型之间的差异等效到控制器输入端, 从而实现对系统总干扰的补偿控制。通过六自由度仿真验证所提方法的有效性和正确性, 仿真结果表明所提方法能够有效地实现高速飞行器姿态跟踪控制, 且能够提高系统的控制品质。所提方法结构简单, 可以在不影响现有控制回路的前提下提高系统对低频干扰的抑制能力, 具有较强的工程可实现性, 为高速飞行器姿态控制系统设计提供了一种设计方法。
中图分类号:
姜丽敏, 陈曙暄, 路坤峰. 基于干扰观测器的飞行器主动抗干扰控制方法[J]. 系统工程与电子技术, 2024, 46(11): 3883-3892.
Limin JIANG, Shuxuan CHEN, Kunfeng LU. Method of aircraft active disturbance rejection control based on disturbance observer[J]. Systems Engineering and Electronics, 2024, 46(11): 3883-3892.

图1
DOB原理框架图"


图2
图 1的等效框图"


图3
Gmiddle(s)的Bode图"


图4
基于DOB的控制结构"


图5
DOB引入的附加网络的Bode图"

表1
气动力和气动力矩系数"
| 特征点 | a11 | a12 | B1 | a21 | a22 | B2 |
| 特征点1 | 0.220 4 | 0.003 1 | 0.025 7 | 0.258 7 | -56.687 0 | 39.229 3 |
| 特征点2 | 0.237 0 | -0.001 6 | 0.027 8 | 0.219 6 | -9.957 4 | 16.304 6 |

图6
表 1中两个特征点的飞行器模型Bode图"


图7
表 1中特征点1采用本文方法和未经DOB校正后的Bode图"


图8
表 1中特征点2采用本文方法和未经DOB校正后的Bode图"

表2
表 1中两个特征点的稳定裕度"
| 参数 | 特征点1 | 特征点2 |
| 上幅值裕度/dB | 10.03(无DOB) | 17.92(无DOB) |
| 8.94(本文方法) | 17.42(本文方法) | |
| 下幅值裕度/dB | 3.33(无DOB) | 5.08(无DOB) |
| 3.30(本文方法) | 5.05(本文方法) | |
| 相位裕度/(°) | 13.73(无DOB) | 17.62(无DOB) |
| 13.75(本文方法) | 17.46(本文方法) | |
| 截频/(rad/s) | 21.16(无DOB) | 18.22(无DOB) |
| 21.26(本文方法) | 18.39(本文方法) |

图9
所提方法的阶跃响应"
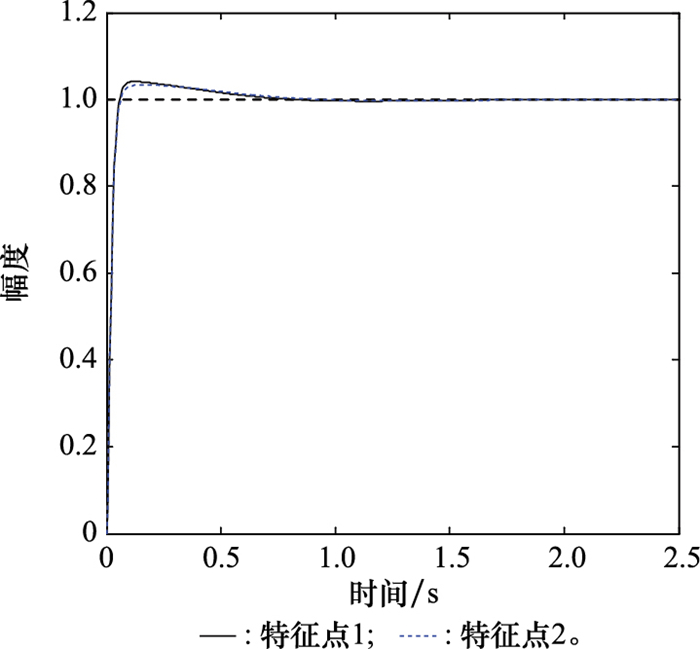
表3
仿真工况"
| 工况 | 质心偏差 | 推力偏差/% | 风干扰 |
| 工况1 | 正 | -9 | 有 |
| 工况2 | 无 | 0 | 有 |
| 工况3 | 负 | 9 | 有 |

图10
3种工况下的六自由度仿真结果"


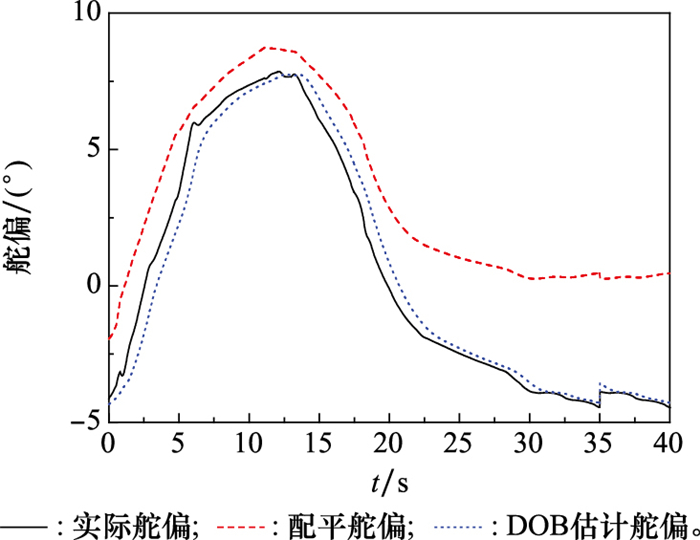
图11
控制指令、配平舵摆角和DOB估计量的曲线"
| 29 | WANG G , XIA H W . A learning-based intelligent control method for hypersonic flight vehicle[J]. Journal of Astronautics, 2023, 44 (2): 233- 242. |
| 30 |
胡军. 高超声速飞行器非线性自适应姿态控制[J]. 宇航学报, 2017, 38 (12): 1281- 1288.
doi: 10.3873/j.issn.1000-1328.2017.12.004 |
|
HU J . The nonlinear adaptive attitude control for hypersonic vehicle[J]. Journal of Astronautics, 2017, 38 (12): 1281- 1288.
doi: 10.3873/j.issn.1000-1328.2017.12.004 |
|
| 1 | ASTROM K J , WITTENMARK B . Adaptive control[M]. New York: Courier Dover Publications, 2013. |
| 2 | ZHOU K , DOYLE J C , GLOVER K , et al. Robust and optimal control[M]. Upper Saddle River, New Jersey: Prentice-Hall, 1996. |
| 3 |
DENIS E , ANDREY P , LEONID F , et al. Delayed sliding mode control[J]. Automatics, 2016, 64, 37- 43.
doi: 10.1016/j.automatica.2015.10.055 |
| 4 |
DEMET C G , CHINGIZ H , JANSET D . Fault tolerant control of attitude dynamics of nanosatellites[J]. International Journal of Sustainable Aviation, 2018, 4 (2): 99- 113.
doi: 10.1504/IJSA.2018.094225 |
| 5 | PUCCI D , HAMEL T , MORIN P , et al. Nonlinear feedback control of axisymmetric aerial vehicles[J]. Automatica, 2015, 53 (1): 72- 78. |
| 6 | 卢凯文, 杨忠, 张秋雁, 等. 推力矢量可倾转四旋翼自抗扰飞行控制方法[J]. 控制理论与应用, 2020, 37 (6): 1377- 1378. |
| LU K W , YANG Z , ZHANG Q Y , et al. Actived insturbance rejection flight control method for thrust-vectored quadrotor with tiltable rotors[J]. Control Theory & Application, 2020, 37 (6): 1377- 1378. | |
| 7 |
WANG Z , LI J , DUAN D . Manipulation strategy of tilt quadrotor based on active disturbance rejection control[J]. Proceedings of the Institution of Mechanical Engineers, 2020, 234 (3): 573- 584.
doi: 10.1177/0954410019875534 |
| 8 |
杨文奇, 卢建华, 姜旭, 等. 基于改进ESO的四旋翼姿态自抗扰控制器设计[J]. 系统工程与电子技术, 2022, 44 (12): 3792- 3799.
doi: 10.12305/j.issn.1001-506X.2022.12.24 |
|
YANG W Q , LU J H , JIANG X , et al. Design of quadrotor attitude active disturbance rejection controller based on improved ESO[J]. Systems Engineering and Electronics, 2022, 44 (12): 3792- 3799.
doi: 10.12305/j.issn.1001-506X.2022.12.24 |
|
| 9 | OHNISHI K, MIYACHI K. Torque-speed regulation of a DC motor based on load torque estimation method[C]//Proc. of the IEEE International Power Electronic Conference, 1983: 95-105. |
| 10 |
李传旭, 孟秀云, 王捷. 基于扰动观测器的飞行器轨迹跟踪控制器设计[J]. 系统工程与电子技术, 2022, 44 (8): 2593- 2600.
doi: 10.12305/j.issn.1001-506X.2022.08.24 |
|
LI C X , MENG X Y , WANG J . Design of aircraft trajectory tracking controller based on disturbance observer[J]. Systems Engineering and Electronics, 2022, 44 (8): 2593- 2600.
doi: 10.12305/j.issn.1001-506X.2022.08.24 |
|
| 11 | 郭雷, 王陈亮, 王雨, 等. 多源干扰下高超声飞行器自主精细控制[J]. 宇航学报, 2023, 44 (4): 558- 565. |
| GUO L , WANG C L , WANG Y , et al. Autonomous refined control for hypersonic flight vehicles with multiple disturbances[J]. Journal of Astronautics, 2023, 44 (4): 558- 565. | |
| 12 | NAKAO M, OHNISHI K, MIYACHI K. A robust decentralized joint control based on interference estimation[C]//Proc. of the IEEE International Conference on Robotics and Automation, 1987: 326-331. |
| 13 | YAMADA K, KOMADA S, ISHIDA M, et al. Characteristics of servo system using high order disturbance observer[C]//Proc. of the 35th Conference on Decision and Control Kobe, 1996: 3252-3257. |
| 14 |
UMENO T , KANEKO T , HORI Y . Robust servosystem design with two degrees of freedom and its application to novel motion control of robot manipulators[J]. IEEE Trans.on Industrial Electronics, 1993, 40 (5): 473- 485.
doi: 10.1109/41.238016 |
| 15 | 陈兴林, 刘川, 周乃新, 等. 基于ZPETC-FF和DOB的精密运动平台控制[J]. 哈尔滨工业大学学报, 2014, 46 (1): 1- 6. |
| CHEN X L , LIU C , ZHOU N X , et al. Controller design based on ZPETC-EF and DOB for precision motion platform[J]. Journal of Harbin Institute Technology, 2014, 46 (1): 1- 6. | |
| 16 |
SATOSHI K , NORIYOSHI M , TAKAMASA H . Control of redundant manipulators considering order of disturbance obser-ver[J]. IEEE Trans.on Industrial Electronics, 2000, 47 (2): 413- 420.
doi: 10.1109/41.836357 |
| 17 | PIRAISOODI T, SADHU S. Characteristic analysis of high order disturbance observer[C]//Proc. of the 2005 Annual IEEE Indicon Conference, 2005: 431-436. |
| 18 |
ZHONG Q X , FANG X , DING Z T . Robust controls of manned submersible vehicle with nonlinear and disturbance observer[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10 (5): 1349- 1351.
doi: 10.1109/JAS.2023.123429 |
| 19 | SU J , WANG L , YUN J . A design of disturbance observer in standart H∞control framework[J]. International Journal of Robust and Nonlinear Control, 2014, 25 (16): 2894- 2910. |
| 20 | SARIYILDIZ E , OHNISHI K . An adaptive reaction force observer design[J]. IEEE Trans.on Industrial Electronics, 2015, 20 (2): 750- 760. |
| 21 | XING D P , SU J B , LIU Y , et al. Robust approach for humanoid joint control based on disturbance observer[J]. IET Control Theory & Applications, 2011, 5 (14): 1630- 1636. |
| 22 |
KIM W , SHIN D , CHUNG C C . Microstepping using distur-bance observer and a variable structure controller for permanent-magnet stepper motors[J]. IEEE Trans.on Industrial Electronics, 2013, 60 (7): 2689- 2699.
doi: 10.1109/TIE.2012.2198033 |
| 23 | OBOE R. How disturbance observer changed my life[C]//Proc. of the IEEE 15th International Workshop on Advanced Motion Control, 2018: 13-20. |
| 24 |
KEMPF C J , KOBAYASHI S . Disturbance observer and feedforward design for a high-speed direct-drive positioning table[J]. IEEE Trans.on Control Systems Technology, 1999, 7 (5): 513- 526.
doi: 10.1109/87.784416 |
| 25 |
CHEN W H , YANG J , GUO L , et al. Disturbance-observer-based control and related methods-an overview[J]. IEEE Trans.on Industrial Electronics, 2016, 63 (2): 1083- 1095.
doi: 10.1109/TIE.2015.2478397 |
| 26 |
VOJTECH V . On the subsystem level gain scheduled controller design for MIMO systems[J]. International Journal of Control, Automation and Systems, 2018, 16 (2): 759- 768.
doi: 10.1007/s12555-017-0094-2 |
| 27 |
安通, 王鹏, 王建华, 等. 弹性高超声速飞行器动态面制度控制一体化设计方法[J]. 系统工程与电子技术, 2022, 44 (3): 956- 966.
doi: 10.12305/j.issn.1001-506X.2022.03.28 |
|
AN T , WANG P , WANG J H , et al. Controller integrated guidance and control schemes for dynamic surface of flexible hypersonic vehicles[J]. Systems Engineering and Electronics, 2022, 44 (3): 956- 966.
doi: 10.12305/j.issn.1001-506X.2022.03.28 |
|
| 28 |
王冠, 茹海忠, 张大力, 等. 弹性高超声速飞行器智能控制系统设计[J]. 系统工程与电子技术, 2022, 44 (7): 2276- 2285.
doi: 10.12305/j.issn.1001-506X.2022.07.24 |
|
WANG G , RU H Z , ZHANG D L , et al. Design of intelligent control system for flexible hypersonic vehicle[J]. Systems Engineering and Electronics, 2022, 44 (7): 2276- 2285.
doi: 10.12305/j.issn.1001-506X.2022.07.24 |
|
| 29 | 王冠, 夏红伟. 一种基于学习的高超声速飞行器智能控制方法[J]. 宇航学报, 2023, 44 (2): 233- 242. |
| [1] | 朱世杰, 陈广东, 刘秉奇. 参照波结构的飞行器对接姿态快速估计[J]. 系统工程与电子技术, 2024, 46(9): 2926-2934. |
| [2] | 王乾, 郑党党, 佟瑞庭, 韩冰, 杨小辉. 基于MBSE的民机飞行控制系统架构设计[J]. 系统工程与电子技术, 2024, 46(9): 3050-3059. |
| [3] | 盛一鸣, 陆正亮, 胡远东, 郑侃, 廖文和. 入射光准直角对模拟式太敏的影响与精度补偿[J]. 系统工程与电子技术, 2024, 46(8): 2798-2806. |
| [4] | 闫帅豪, 魏明英, 郑勇斌. 基于大指令变化率下的防空导弹姿态控制方法[J]. 系统工程与电子技术, 2024, 46(7): 2465-2474. |
| [5] | 何通, 卢青, 周军, 郭宗易. 带有神经网络干扰观测器的视线角约束制导[J]. 系统工程与电子技术, 2024, 46(4): 1372-1382. |
| [6] | 李彦铃, 罗飞舟, 葛致磊. 基于鲁棒观测器的深度强化学习垂直起降运载器姿态稳定研究[J]. 系统工程与电子技术, 2024, 46(3): 1038-1047. |
| [7] | 禹志龙, 李颖晖, 裴彬彬, 段效聪, 张喆. 基于事件触发采样的无尾翼飞机自适应容错姿态控制[J]. 系统工程与电子技术, 2024, 46(3): 1058-1066. |
| [8] | 李新宇, 周召发, 张志利, 郝诗文, 梁哲. 基于SINS/OD失准角观测的垂线偏差测量方法[J]. 系统工程与电子技术, 2024, 46(3): 1067-1074. |
| [9] | 桂洋, 郑柏超, 高鹏. 基于NESO-LFDC的四旋翼无人机滑模姿态控制[J]. 系统工程与电子技术, 2024, 46(3): 1075-1083. |
| [10] | 赵昱宇, 索超, 王雨潇. 基于微分平坦的高超声速飞行器跟踪控制方法[J]. 系统工程与电子技术, 2024, 46(3): 1084-1092. |
| [11] | 陈炳龙, 王磊, 刘帮, 周衡. 基于太阳导行镜测量的高精度姿态确定算法[J]. 系统工程与电子技术, 2024, 46(1): 245-253. |
| [12] | 李建利, 魏梦笛, 王其朋, 张武. MPOS联邦实时组合算法[J]. 系统工程与电子技术, 2023, 45(9): 2860-2865. |
| [13] | 王希彬, 戴洪德, 全闻捷, 王瑞, 贾临生. 基于加速度补偿的惯性行人导航非零速区间姿态估计CKF算法[J]. 系统工程与电子技术, 2023, 45(9): 2894-2901. |
| [14] | 寇鹏, 刘永祥, 张弛, 李玮杰, 张双辉, 霍凯. 序列ISAR像复杂结构航天器在轨姿态估计[J]. 系统工程与电子技术, 2023, 45(8): 2438-2445. |
| [15] | 何益康, 张文瀚, 王振华, 何闻. 用于卫星应急恢复的太阳电池阵转角估计方法[J]. 系统工程与电子技术, 2023, 45(3): 797-805. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||