
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (11): 3862-3873.doi: 10.12305/j.issn.1001-506X.2024.11.28
吴尹菲, 李新凯, 张宏立, 陈颖颖, 龚丰金
收稿日期:2023-11-21
出版日期:2024-10-28
发布日期:2024-11-30
通讯作者:
李新凯
作者简介:吴尹菲(2000—), 女, 硕士研究生, 主要研究方向为集群智能体路径规划基金资助:Yinfei WU, Xinkai LI, Hongli ZHANG, Yingying CHEN, Fengjin GONG
Received:2023-11-21
Online:2024-10-28
Published:2024-11-30
Contact:
Xinkai LI
摘要:
针对集群路径规划中的运算量大、拥堵和碰撞等造成非弹性虚拟管道可行域受限的问题, 提出一种基于弹性面域特性的虚拟管道模型。首先, 提出弹性面域的概念, 其弹性有界平面可作为虚拟管道的边界, 能够有效利用脊曲线横截面附近的空余空间来改变可行域范围。其次, 以管道内部空间的脊曲线为基准扩展安全区域, 改进路径规划算法以适用于弹性面域虚拟管道。最后, 通过对比仿真实验, 验证该模型及所提算法在不同环境下的适用性及优越性。该研究对虚拟管道概念在集群路径规划领域中的推广应用具有一定的实用价值。
中图分类号:
吴尹菲, 李新凯, 张宏立, 陈颖颖, 龚丰金. 基于弹性面域特性的虚拟管道优化与设计[J]. 系统工程与电子技术, 2024, 46(11): 3862-3873.
Yinfei WU, Xinkai LI, Hongli ZHANG, Yingying CHEN, Fengjin GONG. Optimization and design of virtual tube based on elastic area characteristics[J]. Systems Engineering and Electronics, 2024, 46(11): 3862-3873.

图1
基本弹性面域虚拟管参数示意图"


图2
弹性面域虚拟管自交现像"


图3
障碍物密集环境中规划出的弹性面域虚拟管道"


图4
三维子节点分布示意图"


图5
子节点非跨层选取示意图"

表1
三维空间子节点选取规则"
| 可选取子节点位置 | 不存在障碍物位置 | 可选取子节点位置 | 不存在障碍物位置 | 可选取子节点位置 | 不存在障碍物位置 | 可选取子节点位置 | 不存在障碍物位置 | |||
| 1 | 1, 2, 8 | 8 | 8 | 15 | 6, 9, 15 | 22 | 4, 18, 22 | |||
| 2 | 2 | 9 | 9 | 16 | 6, 7, 8, 9, 15, 16, 17 | 23 | 4, 5, 6, 18, 22, 23, 24 | |||
| 3 | 2, 3, 4 | 10 | 1, 2, 8, 9, 10, 11, 17 | 17 | 8, 9, 17 | 24 | 6, 18, 24 | |||
| 4 | 4 | 11 | 2, 9, 11 | 18 | 18 | 25 | 6, 7, 8, 18, 24, 25, 26 | |||
| 5 | 4, 5, 6 | 12 | 2, 3, 4, 9, 11, 12, 13 | 19 | 2, 3, 4, 18, 19, 20, 26 | 26 | 8, 18, 26 | |||
| 6 | 6 | 13 | 4, 9, 13 | 20 | 2, 18, 20 | - | - | |||
| 7 | 6, 7, 8 | 14 | 4, 5, 6, 9, 13, 14, 15 | 21 | 2, 3, 4, 18, 20, 21, 22 | - | - |

图6
在狭窄空间中规划的弹性面域虚拟管道"
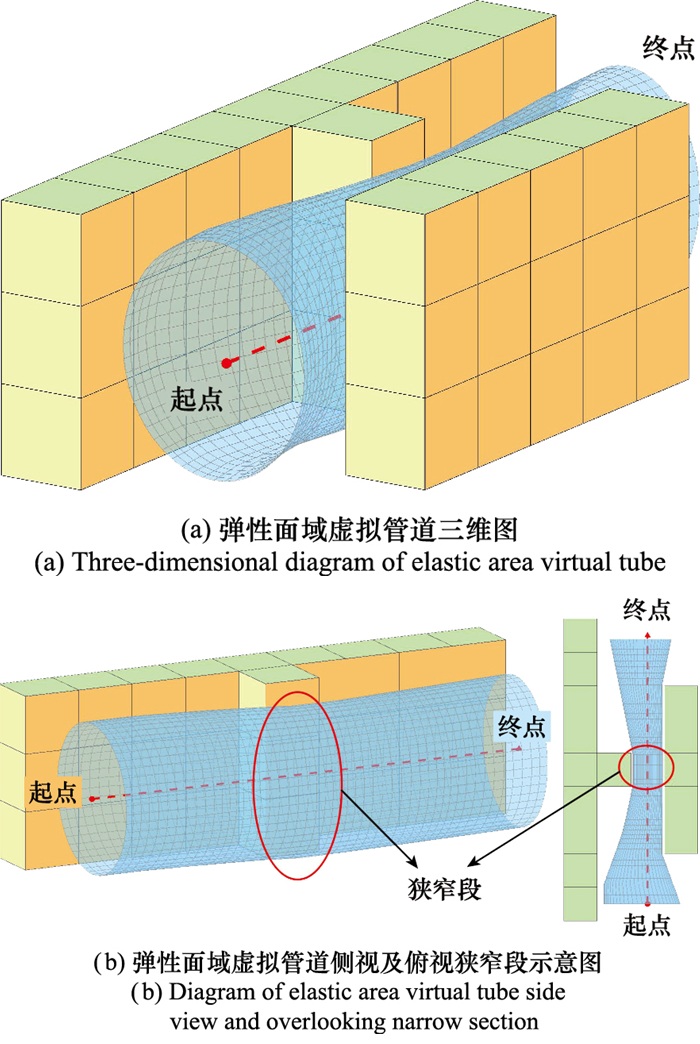

图7
在狭窄空间中规划的非弹性面域虚拟管道"


图8
狭窄段可行域大小对比图"

表2
三维虚拟管道横截面积比较"
| 虚拟管道类型 | 相对生成线的横截面位置 | |||||
| 起点 | 1/10 | 2/10 | 3/10 | 4/10 | 5/10 | |
| 非弹性面域虚拟管道 | 4.08 | 3.35 | 1.59 | 1.10 | 0.77 | 0.61 |
| 弹性面域虚拟管道 | 4.66 | 4.22 | 2.91 | 2.42 | 2.02 | 1.81 |
| 虚拟管道类型 | 相对生成线的横截面位置 | |||||
| 6/10 | 7/10 | 8/10 | 9/10 | 终点 | ||
| 非弹性面域虚拟管道 | 0.66 | 0.94 | 1.20 | 1.80 | 2.66 | |
| 弹性面域虚拟管道 | 1.87 | 2.23 | 2.53 | 3.09 | 3.76 | |

图9
非弹性面域虚拟管道在改进A*算法前后对比"


图10
弹性面域虚拟管道在改进A*算法前后对比"

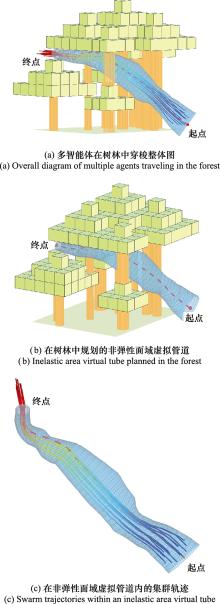
图11
多智能体在非弹性面域虚拟管中穿梭示意图"


图12
多智能体在弹性面域虚拟管中穿梭示意图"

表3
多智能在树林环境下的情况比较"
| 虚拟管道类型 | 运行时间/s | ||||||||||
| Tr=7.14 | Tr=7.35 | Tr=7.56 | |||||||||
| Dd/m | Ds/m | Ar/% | Dd/m | Ds/m | Ar/% | Dd/m | Ds/m | Ar/% | |||
| 非弹性面域虚拟管道 | 0.14 | 0.27 | 50.0 | 0.14 | 0.27 | 92.8 | 0.14 | 0.27 | 100 | ||
| 弹性面域虚拟管道 | 0.14 | 0.27 | 64.3 | 0.14 | 0.27 | 100 | 0.14 | 0.27 | 100 | ||
| 1 |
胡鹏林, 潘泉, 郭亚宁, 等. 多智能体编队控制中的迁移强化学习算法研究[J]. 西北工业大学学报, 2023, 41 (2): 389- 399.
doi: 10.3969/j.issn.1000-2758.2023.02.017 |
|
HU P L , PAN Q , GUO Y N , et al. Study on learning algorithm of transfer reinforcement for multi-agent formation control[J]. Journal of Northwestern Polytechnical University, 2023, 41 (2): 389- 399.
doi: 10.3969/j.issn.1000-2758.2023.02.017 |
|
| 2 | 张超省, 王健, 张林, 等. 面向复杂障碍场的多智能体系统集群避障模型[J]. 兵工学报, 2021, 42 (1): 141- 150. |
| ZHANG C S , WANG J , ZHANG L , et al. A multi-agent system flocking model with obstacle avoidance in complex obstacle field[J]. Acta Armamentarii, 2021, 42 (1): 141- 150. | |
| 3 |
MADRIDANO A , AL-KAFF A , MARTÍN D , et al. Trajectory planning for multi-robot systems: methods and applications[J]. Expert Systems with Applications, 2021, 173, 114660.
doi: 10.1016/j.eswa.2021.114660 |
| 4 |
YANG Y H , XIONG X Z , YAN Y H . UAV formation trajec-toryplanning algorithms: a review[J]. Drones, 2023, 7 (1): 62.
doi: 10.3390/drones7010062 |
| 5 | GUO S, LIU B, ZhANG S, et al. Continuous-time Gaussian process trajectory generation for multi-robot formation via probabilistic inference[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2021: 9247-9253. |
| 6 |
JING S C , ZHAO X M , HUI F , et al. Cooperative CAVs optimal trajectory planning for collision avoidance and merging in the weaving section[J]. Transportmetrica B: Transport Dynamics, 2021, 9 (1): 219- 236.
doi: 10.1080/21680566.2020.1845852 |
| 7 |
JACKSON B E , HOWELL T A , SHAH K , et al. Scalable cooperative transport of cable-suspended loads with UAVs using distributed trajectory optimization[J]. IEEE Robotics and Automation Letters, 2020, 5 (2): 3368- 3374.
doi: 10.1109/LRA.2020.2975956 |
| 8 | QUAN Q , FU R , LI M X , et al. Practical distributed control for VTOL UAVs to pass a virtual tube[J]. IEEE Trans.on Intelligent Vehicles, 2021, 7 (2): 342- 353. |
| 9 | PARK J, KIM J, JANG I, et al. Efficient multi-agent trajectory planning with feasibility guarantee using relative bernstein polynomial[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2020: 434-440. |
| 10 | SHI G Y , HÖNIG W , SHI X C , et al. Neural-swarm2: planning and control of heterogeneous multirotor swarms using learned interactions[J]. IEEE Trans.on Robotics, 2021, 38 (2): 1063- 1079. |
| 11 | 郭宏达, 娄静涛, 杨珍珍, 等. 基于拍卖多智能体深度确定性策略梯度的多无人车分散策略研究[J]. 电子与信息学报, 2024, 46 (1): 287- 298. |
| GUO H D , LOU J T , YANG Z Z , et al. Research on dispersion strategy for multiple unmanned ground vehicles based on auction multi-agent deep deterministic policy gradient[J]. Journal of Electronics & Information Technology, 2024, 46 (1): 287- 298. | |
| 12 | DONG Z L, LIU C H. Collaborative coverage path planning of UAV cluster based on deep reinforcement learning[C]//Proc. of the IEEE 3rd International Conference on Frontiers Technology of Information and Computer, 2021: 201-207. |
| 13 |
LI J , CAO S , LIU X J , et al. Trans-UTPA: PSO and MADDPG based multi-UAVs trajectory planning algorithm for emergency communication[J]. Frontiers in Neurorobotics, 2023, 16, 1076338.
doi: 10.3389/fnbot.2022.1076338 |
| 14 | 刘卫国, 项志宇, 刘伟平, 等. 基于分布式强化学习的车辆控制算法研究[J]. 汽车工程, 2023, 45 (9): 1637- 1645. |
| LIU W G , XIANG Z Y , LIU W P , et al. Research on vehicle control algorithm based on distributed reinforcement learning[J]. Aulomotive Engineering, 2023, 45 (9): 1637- 1645. | |
| 15 |
DORIGO M , THERAULAZ G , TRIANNI V . Swarm robotics: past, present, and future[point of view][J]. Proceedings of the IEEE, 2021, 109 (7): 1152- 1165.
doi: 10.1109/JPROC.2021.3072740 |
| 16 |
GUL F , MIR A , MIR I , et al. A centralized strategy for multi-agent exploration[J]. IEEE Access, 2022, 10, 126871- 126884.
doi: 10.1109/ACCESS.2022.3218653 |
| 17 |
ZHENG D , ZHANG Y F , LI F , et al. UAVs cooperative task assignment and trajectory optimization with safety and time constraints[J]. Defence Technology, 2023, 20, 149- 161.
doi: 10.1016/j.dt.2022.01.011 |
| 18 |
LIN S W , LIU A , WANG J G , et al. A review of path-planning approaches for multiple mobile robots[J]. Machines, 2022, 10 (9): 773.
doi: 10.3390/machines10090773 |
| 19 |
QUAN L , YIN L J , ZHANG T R , et al. Robust and efficient trajectory planning for formation flight in dense environments[J]. IEEE Trans.on Robotics, 2023, 39 (6): 4785- 4804.
doi: 10.1109/TRO.2023.3301295 |
| 20 |
尹洋, 杨全顺, 王征, 等. 通信距离约束下的无人船集群覆盖搜索方法[J]. 系统工程与电子技术, 2022, 44 (12): 3821- 3828.
doi: 10.12305/j.issn.1001-506X.2022.12.27 |
|
YIN Y , YANG Q S , WANG Z , et al. USV cluster coverage search method with communication distance constraint[J]. Systems Engineering and Electronics, 2022, 44 (12): 3821- 3828.
doi: 10.12305/j.issn.1001-506X.2022.12.27 |
|
| 21 |
LIU S , WATTERSON M , MOHTA K , et al. Planning dynamically feasible trajectories for quadrotors using safe flight corridors in 3-D complex environments[J]. IEEE Robotics and Automation Letters, 2017, 2 (3): 1688- 1695.
doi: 10.1109/LRA.2017.2663526 |
| 22 | MAO P D, QUAN Q. Making robotics swarm flow more smoothly: a regular virtual tube model[C]//Proc. of the IEEE/ RSJ International Conference on Intelligent Robots and Systems, 2022: 4498-4504. |
| 23 | GAO Y , BAI C G , QUAN Q . Distributed control for a multi-agent system to pass through a connected quadrangle virtual tube[J]. IEEE Trans.on Control of Network Systems, 2022, 2 (10): 693- 705. |
| 24 |
QUAN Q , GAO Y , BAI C G . Distributed control for a robotic swarm to pass through a curve virtual tube[J]. Robotics and Autonomous Systems, 2023, 162, 104368.
doi: 10.1016/j.robot.2023.104368 |
| 25 |
LIU L S , WANG B , XU H . Research on path-planning algorithm integrating optimization a-star algorithm and artificial potential field method[J]. Electronics, 2022, 11 (22): 3660.
doi: 10.3390/electronics11223660 |
| 26 | O'NEILL B . Elementary differential geometry[M]. 2nd ed London: Elsevier, 2006. |
| 27 | BILICI M , KOSEOGLU G . Tubular involutive surfaces with frenet frame in euclidean 3-space[J]. Maejo International Journal of Science and Technology, 2023, 17 (2): 96- 106. |
| 28 |
MAEKAWA T . An overview of offset curves and surfaces[J]. Computer-Aided Design, 1999, 31 (3): 165- 173.
doi: 10.1016/S0010-4485(99)00013-5 |
| 29 | ELBER G , COHEN E . Error bounded variable distance offset operator for free form curves and surfaces[J]. International Journal of Computational Geometry & Applications, 1991, 1 (1): 67- 78. |
| 30 |
SEONG J K , ELBER G , KIM M S . Trimming local and global self-intersections in offset curves/surfaces using distance maps[J]. Computer-Aided Design, 2006, 38 (3): 183- 193.
doi: 10.1016/j.cad.2005.08.002 |
| 31 |
LEE I K , KIM M S , ELBER G . Planar curve offset based on circle approximation[J]. Computer-Aided Design, 1996, 28 (8): 617- 630.
doi: 10.1016/0010-4485(95)00078-X |
| 32 |
MAEKAWA T , PATRIKALAKIS N M , SAKKALIS T , et al. Analysis and applications of pipe surfaces[J]. Computer Aided Geometric Design, 1998, 15 (5): 437- 458.
doi: 10.1016/S0167-8396(97)00042-3 |
| 33 | GAO F, WU W, LIN Y, et al. Online safe trajectory generation for quadrotors using fast marching method and bernstein basis polynomial[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2018: 344-351. |
| 34 |
LI Q , WEI J Y , GOU Q X , et al. Distributed adaptive fixed-time formation control for second-order multi-agent systems with collision avoidance[J]. Information Sciences, 2021, 564, 27- 44.
doi: 10.1016/j.ins.2021.02.029 |
| [1] | 夏雨奇, 黄炎焱, 陈恰. 基于深度Q网络的无人车侦察路径规划[J]. 系统工程与电子技术, 2024, 46(9): 3070-3081. |
| [2] | 费博雯, 包卫东, 刘大千, 朱晓敏. 面向动态目标搜索与打击的空地协同自主任务分配方法[J]. 系统工程与电子技术, 2024, 46(7): 2346-2358. |
| [3] | 李杰, 谭跃进. 基于集成改进蚁群算法的作战环推荐方法[J]. 系统工程与电子技术, 2024, 46(6): 2002-2012. |
| [4] | 孙家玮, 余明晖, 杨大鹏, 汤皓泉, 卞大鹏. 基于CL-RRT与MPC的舰载机牵引系统路径规划[J]. 系统工程与电子技术, 2024, 46(5): 1745-1755. |
| [5] | 隋东, 杨振宇, 丁松滨, 周婷婷. 基于EMSDBO算法的无人机三维航迹规划[J]. 系统工程与电子技术, 2024, 46(5): 1756-1766. |
| [6] | 刘钢, 安志镖, 张茂军, 刘煜, 李武. 基于连续路网环境的实体化主体路径规划算法[J]. 系统工程与电子技术, 2024, 46(4): 1346-1356. |
| [7] | 赵贵祥, 周健, 李云淼, 王晨旭. 改进双向快速搜索随机树的无人艇路径规划[J]. 系统工程与电子技术, 2024, 46(4): 1364-1371. |
| [8] | 唐恒, 孙伟, 吕磊, 贺若飞, 吴建军, 孙昌浩, 孙田野. 融合动态奖励策略的无人机编队路径规划方法[J]. 系统工程与电子技术, 2024, 46(10): 3506-3518. |
| [9] | 肖士博, 齐国元, 邓嘉豪, 苏鹏鹏, 贾晶童. 无人机集群曲线虚拟管道空间满足规划[J]. 系统工程与电子技术, 2024, 46(10): 3528-3535. |
| [10] | 李广强, 董文超, 朱大庆, 于越, 陈浩, 于双和. 基于改进鲸鱼优化算法的AUV三维路径规划[J]. 系统工程与电子技术, 2023, 45(7): 2170-2182. |
| [11] | 刘瑶, 夏阳升, 石建迈, 陈超, 黄金才. 车载多无人机协同多区域覆盖路径规划方法[J]. 系统工程与电子技术, 2023, 45(5): 1380-1390. |
| [12] | 韩维, 刘子玄, 苏析超, 崔凯凯, 刘洁. 结合启发式与最优控制的舰载机甲板路径规划算法[J]. 系统工程与电子技术, 2023, 45(4): 1098-1110. |
| [13] | 张浩杰, 张玉东, 梁荣敏, 杨甜甜. 改进A*算法的机器人能耗最优路径规划方法[J]. 系统工程与电子技术, 2023, 45(2): 513-520. |
| [14] | 吴靖宇, 朱世强, 宋伟, 施浩磊, 吴泽南. 基于改进单元分解法的全覆盖路径规划[J]. 系统工程与电子技术, 2023, 45(12): 3949-3957. |
| [15] | 赵贵祥, 王晨旭, 王贺平, 李云淼. 改进速度障碍法的无人艇局部路径规划[J]. 系统工程与电子技术, 2023, 45(12): 3975-3983. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||