
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (11): 3844-3861.doi: 10.12305/j.issn.1001-506X.2024.11.27
李卫斌, 秦晨浩, 张天一, 毛鑫, 杨东浩, 纪文搏, 侯彪, 焦李成
收稿日期:2023-11-16
出版日期:2024-10-28
发布日期:2024-11-30
通讯作者:
李卫斌
作者简介:李卫斌(1976—), 男, 教授, 博士研究生导师, 博士, 主要研究方向为北斗、遥感、智能导航、大模型及应用、人工智能基金资助:Weibin LI, Chenhao QIN, Tianyi ZHANG, Xin MAO, Donghao YANG, Wenbo JI, Biao HOU, Licheng JIAO
Received:2023-11-16
Online:2024-10-28
Published:2024-11-30
Contact:
Weibin LI
摘要:
自主导航能力是无人系统所要具备的核心能力。近年来, 无人系统作业的环境日益复杂, 所面临的任务也越来越有挑战性, 这对其自主导航能力提出更高的要求。随着神经科学和人工智能的不断发展, 基于动物大脑空间导航机理的类脑导航技术已经成为一种解决复杂环境下智能导航问题的方案。本文对类脑智能导航技术的发展历程进行梳理与总结, 重点讨论类脑导航的空间认知模型建模技术及其应用技术——类脑同时定位与建图(simultaneous localization and mapping, SLAM)技术及类脑集群导航技术。最后, 总结目前类脑导航技术面临的挑战和不足, 并探讨未来的重要发展方向。
中图分类号:
李卫斌, 秦晨浩, 张天一, 毛鑫, 杨东浩, 纪文搏, 侯彪, 焦李成. 综述: 类脑智能导航建模技术及其应用[J]. 系统工程与电子技术, 2024, 46(11): 3844-3861.
Weibin LI, Chenhao QIN, Tianyi ZHANG, Xin MAO, Donghao YANG, Wenbo JI, Biao HOU, Licheng JIAO. Review: brain-inspired intelligent navigation modeling technology and its application[J]. Systems Engineering and Electronics, 2024, 46(11): 3844-3861.
表1
动物脑导航系统研究历程"
| 时间/年份 | 研究者 | 研究内容 |
| 1971 | O’keefe等 | 位置细胞被发现在哺乳动物大脑海马体中[ |
| 1978 | Eccles等 | 揭示了海马回路的神经环路和神经元网络, 证实海马体是海马回路的一部分, 这是一种被认为与空间导航及记忆有关的神经回路[ |
| 1979 | O’keefe等 | 阐述认知地图理论, 提出海马体的某些功能能使动物在场地之间建立联系, 以此来进行空间推断与探测[ |
| 1990 | Taube等 | 头朝向细胞被发现存在于海马体中, 这些细胞可用来计算头部朝向信息[ |
| 2005 | Hafting等 | 网格细胞被证明存在于内嗅皮层中, 可编码表征动物周围环境, 当动物的位置与代表环境的等边三角形网格上的顶点重合时, 网格单元被激活[ |
| 2009 | Lever等 | 边界细胞被证实存在于海马体中, 这类细胞可以为位置细胞提供环境信息, 并补充路径整合信息[ |
| 2014 | Bjerknes等 | 证明边界细胞在大鼠导航行为开始时就存在, 而网格细胞成熟速度比边界细胞慢[ |
| 2015 | Kropff等 | 探讨内嗅皮层中的速度细胞在动物自我定位中的作用, 即提供关于运行速度的信息, 并调节多种导航细胞的放电频率[ |
| 2020 | Yi等 | 证明海马体在动物导航过程中有连接及整合多个与导航相关脑区的作用, 支持空间记忆和语言之间连接的神经机制[ |
| 2021 | Basu等 | 除了海马体之外, 动物眶额皮层(orbito frontal cortex, OFC)中的神经元也可以形成空间表征, 在导航过程中持续指向动物的后续目标目的地[ |
| 2022 | Ormond等 | 验证动物导航过程中, 海马体创建基于矢量的模型来支持动物的灵活导航, 使得动物具有最优路径规划能力[ |

图1
哺乳动物矢量导航机理[19]"


图2
哺乳动物空间导航脑区功能"
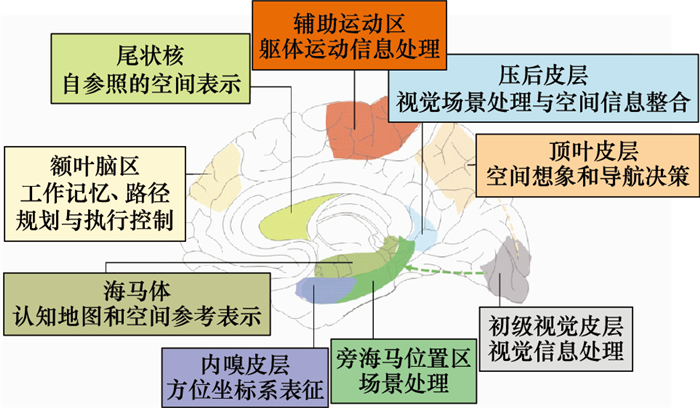
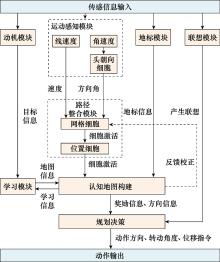
图3
类脑智能导航系统一体化架构[34]"


图4
基于CANN的导航细胞模型[5]"


图5
多层头方向细胞模型及三维网格细胞模型"


图6
振荡相干模型"

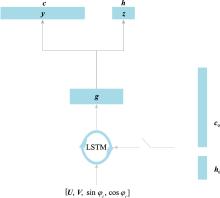
图7
基于LSTM的网格细胞模型"


图8
SNN模型"


图9
经典SLAM框架[124]"


图10
RatSLAM基本框架[73]"

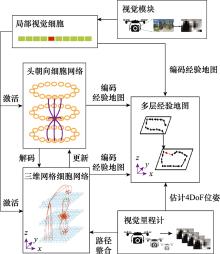
图11
NeuroSLAM框架[80]"

表2
类脑SLAM技术发展历程"
| 时间/年份 | 模拟细胞 | 传感器数据 | 主要内容 |
| 2000 | 位置细胞、海马体 | 单目视觉 | 提出空间认知和导航任务过程中海马活动的计算模型[ |
| 2004 | 位置细胞、头朝向细胞 | 单目视觉 | 提出一个基于位姿细胞的二维SLAM技术, 称为RatSLAM, 以实现大型拓扑地图实时构建功能[ |
| 2005 | 位置细胞 | 单目视觉 | 尝试构建模拟哺乳动物神经系统的仿生机器人控制架构[ |
| 2008 | 位置细胞 | 全景相机 | 利用神经网络编码的网格细胞进行路径积分, 为移动机器人提供认知地图构建及导航功能[ |
| 2013 | 位置细胞、头朝向细胞 | 声纳 | 受RatSLAM提出基于声纳的BatSLAM技术,实现拓扑地图构建任务[ |
| 2016 | 位置细胞、头朝向细胞 | 声纳相机 | 将RatSLAM技术从二维延伸至三维的水下作业场景[ |
| 2018 | 位置细胞、头朝向细胞 | 三维相机、红外传感器 | 将情景记忆技术引入到无人系统建图网络中, 使得机器人可以在构建出拓扑地图后存储对应的地图信息, 以便于在需要到达指定位置时进行路径规划[ |
| 2019 | 头朝向细胞、网格细胞 | 视觉传感器 | 使用三维导航细胞构建三维四自由度类脑SLAM系统, 称为NeuroSLAM[ |
| 2020 | 头朝向细胞、网格细胞 | 视觉传感器 | 提出基于贝叶斯吸引子网络的NeuroBayesSLAM技术, 模拟动物导航时的多源感官融合机制, 来完成认知地图构建任务[ |
| 2022 | 头朝向细胞、网格细胞、位置细胞 | 视觉传感器 | 构建基于反赫布学习递归神经网络的空间认知模型, 并采用贝叶斯估计方法进行误差修正, 使得无人系统可整合多源信息完成认知地图构建任务[ |
| 1 | 陈雨荻, 熊智, 刘建业, 等. 基于海马体的面向未知复杂环境类脑导航技术综述[J]. 兵工学报, 2022, 43 (11): 2965- 2980. |
| CHEN Y D , XIONG Z , LIU J Y , et al. Review of brain-inspired navigation technology based on hippocampal formation for unknown complex environments[J]. Acta Armamentarii, 2022, 43 (11): 2965- 2980. | |
| 2 | 朱祥维, 沈丹, 肖凯, 等. 类脑导航的机理、算法、实现与展望[J]. 航空学报, 2023, 44 (19): 6- 38. |
| ZHU X W , SHEN D , XIAO K , et al. Mechanisms, algorithms, implementation and perspectives of brain-inspired navigation[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (19): 6- 38. | |
| 3 | 郭迟, 罗宾汉, 李飞, 等. 类脑导航算法: 综述与验证[J]. 武汉大学学报(信息科学版), 2021, 46 (12): 1819- 1831. |
| GUO C , LUO B H , LI F , et al. Review and verification for the brain-inspired navigation algorithm[J]. Geomatics and Information Science of Wuhan University, 2021, 46 (12): 1819- 1831. | |
| 4 |
LEONARD J , DURRANT W H . Mobile robot localization by tracking geometric beacons[J]. IEEE Trans.on Robotics and Automation, 1991, 7 (3): 376- 382.
doi: 10.1109/70.88147 |
| 5 | 斯白露, 罗壹凡. 空间记忆与类脑导航研究进展[J]. 人工智能, 2020, (1): 16- 31. |
| SI B L , LUO Y F . Research progress on spatial memory and the brain-inspired navigation[J]. Artificial Intelligence View, 2020, (1): 16- 31. | |
| 6 | 杨闯, 刘建业, 熊智, 等. 由感知到动作决策一体化的类脑导航技术研究现状与未来发展[J]. 航空学报, 2020, 41 (1): 23280. |
| YANG C , LIU J Y , XIONG Z , et al. Brain-inspired navigation technology integrating perception and action decision: a review and outlook[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (1): 23280. | |
| 7 |
O'KEEFE J , DOSTROVSKY J . The hippocampus as a spatial map: preliminary evidence from unit activity in the freely-moving rat[J]. Brain Research, 1971, 34 (1): 171- 175.
doi: 10.1016/0006-8993(71)90358-1 |
| 8 | ECCLES J C , MILNER B . Localization of hippocampus in the rat using the 2-deoxyglucose method[J]. Neuroscience Letters, 1978, 8 (4): 237- 242. |
| 9 |
O'KEEFE J , NADEL L . The hippocampus as a cognitive map[J]. Behavioral and Brain Sciences, 1979, 2 (4): 487- 494.
doi: 10.1017/S0140525X00063949 |
| 10 |
TAUBE J , MULLER R , RANCK J . Head-direction cells recorded from the postsubiculum in freely moving rats. Ⅱ. Effects of environmental manipulations[J]. Journal of Neuroscience, 1990, 10 (2): 436- 447.
doi: 10.1523/JNEUROSCI.10-02-00436.1990 |
| 11 |
HAFTING T , FYHN M , MOLDEN S , et al. Micro-structure of a spatial map in the entorhinal cortex[J]. Nature, 2005, 436 (7052): 801- 806.
doi: 10.1038/nature03721 |
| 12 |
LEVER C , BURTON S , JEEWAJEE A , et al. Boundary vector cells in the subiculum of the hippocampal formation[J]. Journal of Neuroscience, 2009, 29 (31): 9771- 9777.
doi: 10.1523/JNEUROSCI.1319-09.2009 |
| 13 |
BJERKNES T , MOSER E , MOSER M B . Representation of geometric borders in the developing rat[J]. Neuron, 2014, 82 (1): 71- 78.
doi: 10.1016/j.neuron.2014.02.014 |
| 14 |
KROPFF E , CARMICHAEL J E , MOSER M B , et al. Speed cells in the medial entorhinal cortex[J]. Nature, 2015, 523 (7561): 419- 424.
doi: 10.1038/nature14622 |
| 15 |
YI P , DOUGLAS C , YANAN S , et al. Theta oscillations support the interface between language and memory[J]. NeuroImage, 2020, 215, 116782.
doi: 10.1016/j.neuroimage.2020.116782 |
| 16 |
BASU R , GEBAUER R , HERFURTH T , et al. The orbitofrontal cortex maps future navigational goals[J]. Nature, 2021, 599 (7885): 449- 452.
doi: 10.1038/s41586-021-04042-9 |
| 17 |
ORMOND J , O'KEEFE J . Hippocampal place cells have goal-oriented vector fields during navigation[J]. Nature, 2022, 607 (7920): 741- 746.
doi: 10.1038/s41586-022-04913-9 |
| 18 | 王琳, 王亮. 认知地图的神经环路基础[J]. 生物化学与生物物理进展, 2017, 44 (3): 187- 197. |
| WANG L , WANG L . Neural circuit basis of cognitive map[J]. Progress in Biochemistry and Biophysics, 2017, 44 (3): 187- 197. | |
| 19 | 杨闯, 刘建业, 熊智, 等. 基于多尺度网格细胞模型的无人机类脑矢量导航方法[J]. 中国惯性技术学报, 2020, 28 (2): 179- 185. |
| YANG C , LIU J Y , XIONG Z , et al. Brain-inspired vector navigation method based on model of multi-scale grid cells[J]. Journal of Chinese Inertial Technology, 2020, 28 (2): 179- 185. | |
| 20 |
SHARP P E . Computer simulation of hippocampal place cells[J]. Psychobiology, 1991, 19 (2): 103- 115.
doi: 10.3758/BF03327179 |
| 21 |
TOURETZKY D S , REDISH A D . Theory of rodent navigation based on interacting representations of space[J]. Hippocampus, 1996, 6 (3): 247- 270.
doi: 10.1002/(SICI)1098-1063(1996)6:3<247::AID-HIPO4>3.0.CO;2-K |
| 22 | CHOKSHI K, WERMTER S, WEBER C. Learning localisation based on landmarks using self-organisation[C]//Proc. of the Artificial Neural Networks and Neural Information Processing, 2003: 504-511. |
| 23 | ISLAM T, FUKUZAKI R. A model of path integration and navigation based on head direction cells in entorhinal cortex[C]// Proc. of the International Conference on Neural Information Processing, 2010: 82-90. |
| 24 |
KUBIE J L , FENTON A A . Heading-vector navigation based on head-direction cells and path integration[J]. Hippocampus, 2009, 19 (5): 456- 479.
doi: 10.1002/hipo.20532 |
| 25 |
WALTERS D M , STRINGER S M . Path integration of head direction: updating a packet of neural activity at the correct speed using neuronal time constants[J]. Biological Cybernetics, 2010, 103 (1): 21- 41.
doi: 10.1007/s00422-009-0355-0 |
| 26 | 孔祥祯, 张凤翔, 蒲艺. 空间导航的脑网络基础和调控机制[J]. 心理科学进展, 2023, 31 (3): 330- 337. |
| KONG X Z , ZHANG F X , PU Y . The functional brain network that supports human spatial navigation[J]. Advances in Psychological Science, 2023, 31 (3): 330- 337. | |
| 27 |
COUGHLAN G , LACZÓ J , HORT J , et al. Spatial navigation deficits—overlooked cognitive marker for preclinical Alzheimer disease?[J]. Nature Reviews Neurology, 2018, 14 (8): 496- 506.
doi: 10.1038/s41582-018-0031-x |
| 28 |
EKSTROM A D , HUFFMAN D J , STARRETT M . Interacting networks of brain regions underlie human spatial navigation: a review and novel synthesis of the literature[J]. Journal of neurophysiology, 2017, 118 (6): 3328- 3344.
doi: 10.1152/jn.00531.2017 |
| 29 |
KONG X Z , WANG X , PU Y , et al. Human navigation network: the intrinsic functional organization and behavioral relevance[J]. Brain Structure and Function, 2017, 222, 749- 764.
doi: 10.1007/s00429-016-1243-8 |
| 30 |
BAUMANN O , MATTINGLEY J B . Extrahippocampal contributions to spatial navigation in humans: a review of the neuroimaging evidence[J]. Hippocampus, 2021, 31 (7): 640- 657.
doi: 10.1002/hipo.23313 |
| 31 |
WOLBERS T , HEGARTY M . What determines our navigational abilities?[J]. Trends in Cognitive Sciences, 2010, 14 (3): 138- 146.
doi: 10.1016/j.tics.2010.01.001 |
| 32 |
CORNWELL B R , JOHNSON L L , HOLROYD T , et al. Human hippocampal and parahippocampal theta during goal-directed spatial navigation predicts performance on a virtual morris water maze[J]. Journal of Neuroscience, 2008, 28 (23): 5983- 5990.
doi: 10.1523/JNEUROSCI.5001-07.2008 |
| 33 |
MHATRE H , GORCHETCHNIKOV A , GROSSBERG S . Grid cell hexagonal patterns formed by fast self-organized learning within entorhinal cortex[J]. Hippocampus, 2012, 22 (2): 320- 334.
doi: 10.1002/hipo.20901 |
| 34 | TEJERA G , LLOFRIU M , BARRER A , et al. Bio-inspired robotics: a spatial cognition model integrating place cells, grid cells and head direction cells[J]. Journal of Intelligent & Robotic Systems: Theory & Application, 2018, 91 (1): 85- 99. |
| 35 |
EDVARDSEN V , BICANSKI A , BURGESS N . Navigating with grid and place cells in cluttered environments[J]. Hippocampus, 2020, 30 (3): 220- 232.
doi: 10.1002/hipo.23147 |
| 36 | LLOFRIU M, SCLEIDOROVICH P, TEJERA G, et al. A computational model for a multi-goal spatial navigation task inspired by rodent studies[C]//Proc. of the IEEE International Joint Conference on Neural Networks, 2019. |
| 37 |
LI J S , CHU J K , ZHANG R , et al. Brain-inspired navigation model based on the distribution of polarized sky-light[J]. Machines, 2022, 10 (11): 1028.
doi: 10.3390/machines10111028 |
| 38 |
CHAO Y X , AUGENSTEIN P , ROENNAU A , et al. Brain inspired path planning algorithms for drones[J]. Frontiers in Neurorobotics, 2023, 17, 1111861.
doi: 10.3389/fnbot.2023.1111861 |
| 39 |
CHEN Y D , XIONG Z , LIU J Y , et al. A positioning method based on place cells and head-direction cells for inertial/visual brain-inspired navigation system[J]. Sensors, 2021, 21 (23): 7988.
doi: 10.3390/s21237988 |
| 40 |
STEFFEN L , REICHARD D , WEINLAND J , et al. Neuromorphic stereo vision: a survey of bio-inspired sensors and algorithms[J]. Frontiers in Neurorobotics, 2019, 13, 28- 48.
doi: 10.3389/fnbot.2019.00028 |
| 41 |
GEVA-SAGIV M , LAS L , YOVEL Y , et al. Spatial cognition in bats and rats: from sensory acquisition to multiscale maps and navigation[J]. Nature Reviews Neuroscience, 2015, 16 (2): 94- 108.
doi: 10.1038/nrn3888 |
| 42 | TIAN S, EBERT F, JAYARAMAN D, et al. Manipulation by feel: touch-based control with deep predictive models[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2019: 818-824. |
| 43 | WU W C, SCHENATO L, WOOD R J, et al. Biomimetic sensor suite for flight control of a micromechanical flying insect: design and experimental results[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2003: 1146-1151. |
| 44 |
DESIMONE R . Neural mechanisms of selective visual attention[J]. Annual Review of Neuroscience, 1995, 18 (1): 193- 222.
doi: 10.1146/annurev.ne.18.030195.001205 |
| 45 | CARTWRIGHT B A , COLLETT T S . Landmark maps for honeybees[J]. Biological Cybernetics, 1987, 57 (1): 85- 93. |
| 46 | KAUFMANN E, LOQUERCIO A, RANFTL R, et al. Deep drone racing: learning agile flight in dynamic environments[C]// Proc. of the Conference on Robot Learning, 2018: 133-145. |
| 47 |
LOQUERCIO A , KAUFMANN E , RANFTL R , et al. Deep drone racing: from simulation to reality with domain randomization[J]. IEEE Trans.on Robotics, 2020, 36 (1): 1- 14.
doi: 10.1109/TRO.2019.2942989 |
| 48 | DAN R, BESSE F, VIOLA F, et al. Learning models for visual 3D localization with implicit mapping[EB/OL]. [2024-03-16]. https://doi.org/10.48550/arXiv.1807.03149. |
| 49 |
ZHUO Z A , DL B , LL B . A performance compensation method for GPS/INS integrated navigation system based on CNN-LSTM during GPS outages[J]. Measurement, 2022, 188, 110516.
doi: 10.1016/j.measurement.2021.110516 |
| 50 |
ZHAO S , ZHOU Y L , HUANG T C . A novel method for ai-assisted ins/gnss navigation system based on CNN-GRU and CKF during GNSS outage[J]. Remote Sensing, 2022, 14 (18): 4494.
doi: 10.3390/rs14184494 |
| 51 |
MADL T , FRANKLIN S , CHEN K , et al. Bayesian integration of information in hippocampal place cells[J]. Plos One, 2014, 9 (3): e89762.
doi: 10.1371/journal.pone.0089762 |
| 52 |
MCNAUGHTON B L , BATTAGLIA F P , JENSEN O , et al. Path integration and the neural basis of the "cognitive map"[J]. Nature Reviews Neuroscience, 2006, 7 (8): 663- 678.
doi: 10.1038/nrn1932 |
| 53 |
NICHOLS E , MCDAID L J , SIDDIQUE N H . Case study on a self-organizing spiking neural network for robot navigation[J]. International Journal of Neural Systems, 2010, 20 (6): 501- 508.
doi: 10.1142/S0129065710002577 |
| 54 |
韩昆, 吴德伟, 来磊. 类脑导航中基于差分Hebbian学习的网格细胞构建模型[J]. 系统工程与电子技术, 2020, 42 (3): 674- 679.
doi: 10.3969/j.issn.1001-506X.2020.03.023 |
|
HAN K , WU D W , LAI L . Model of generating grid cell based on difference Hebbian learning in brain-inspired navigation[J]. Systems Engineering and Electronics, 2020, 42 (3): 674- 679.
doi: 10.3969/j.issn.1001-506X.2020.03.023 |
|
| 55 | WANG X , HOU Z G , FENG L , et al. Mobile robots' modular navigation controller using spiking neural networks[J]. Neurocomputing, 2014, 134 (25): 230- 238. |
| 56 | FU E , BRAVO M , ROSKOS B . Single-destination navigation in a multiple-destination environment: a new "later-destination attractor" bias in route choice[J]. Memory & Cognition, 2015, 43 (7): 1043- 1055. |
| 57 |
ANGELAKI D E , LAURENS J . The head direction cell network: attractor dynamics, integration within the navigation system, and three-dimensional properties[J]. Current Opinion in Neurobiology, 2020, 60, 136- 144.
doi: 10.1016/j.conb.2019.12.002 |
| 58 |
KAVRAKI L E , SVESTKA P , LATOMBE J C , et al. Probabilistic roadmaps for path planning in high-dimensional configuration spaces[J]. IEEE Trans.on Robotics and Automation, 1996, 12 (4): 566- 580.
doi: 10.1109/70.508439 |
| 59 | LAVALLE S M, KUFFNER J J. Rapidly-exploring random trees: progress and prospects[C]//Proc. of the Conference on 4th Algorithmic and Computational Robotics: New Direction, 2001: 303-307. |
| 60 | JR J, LAVALLE S M. RRT-Connect: an efficient approach to single-query path planning[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2000: 995-1001. |
| 61 |
VEGARD E . Goal-directed navigation based on path integration and decoding of grid cells in an artificial neural network[J]. Natural Computing, 2019, 18 (1): 13- 27.
doi: 10.1007/s11047-016-9575-0 |
| 62 |
GOLDSCHMIDT D , MANOONPONG P , DASGUPT S . A neurocomputational model of goal-directed navigation in insect-inspired artificial agents[J]. Frontiers in Neurorobotics, 2017, 11 (20)
doi: 10.3389/fnbot.2017.00020 |
| 63 | FAUST A, RAMIREZ O, FISER M, et al. PRM-RL: long-range robotic navigation tasks by combining reinforcement learning and sampling-based planning[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2018: 5113-5120. |
| 64 | ZHU Y, MOTTAGHI R, KOLVE E, et al. Target-driven visual navigation in indoor scenes using deep reinforcement learning[C]//Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2017: 3357-3364. |
| 65 | SHEN W B, XU D, ZHU Y, et al. Situational fusion of visual representation for visual navigation[C]//Proc. of the IEEE/CVF International Conference on Computer Vision, 2019: 2881-2890. |
| 66 | DU H M, YU X, ZHENG L. Learning object relation graph and tentative policy for visual navigation[C]//Proc. of the European Conference on Computer Vision, 2020: 19-34. |
| 67 | MARR D . Simple memory: a theory for archicortex[J]. Philosophical Transactions of The Royal Society B Biological Sciences, 1971, 262 (841): 23- 81. |
| 68 | WU S , WONG K Y M , FUNG C C A , et al. Continuous attractor neural networks: candidate of a canonical model for neural information representation[J]. F1000research, 2016, 5 (16): 209- 226. |
| 69 |
BUSH D , BURGESS N . A hybrid oscillatory interference/continuous attractor network model of grid cell firing[J]. The Journal of Neuroscience: the Official Journal of the Society for Neuroscience, 2014, 34 (14): 5065- 5079.
doi: 10.1523/JNEUROSCI.4017-13.2014 |
| 70 |
ZHANG K . Representation of spatial orientation by the intrinsic dynamics of the head-direction cell ensemble: a theory[J]. Journal of Neuroscience, 1996, 16 (6): 2112- 2126.
doi: 10.1523/JNEUROSCI.16-06-02112.1996 |
| 71 | REDISH A D , ELGA A N , TOURETZKY D S . A coupled attractor model of the rodent head direction system[J]. Network Computation in Neural Systems, 1997, 7 (4): 671- 685. |
| 72 |
赵辰豪, 吴德伟, 韩昆, 等. 基于多尺度网格细胞的路径整合模型[J]. 系统工程与电子技术, 2021, 43 (10): 2961- 2967.
doi: 10.12305/j.issn.1001-506X.2021.10.31 |
|
ZHAO C H , WU D W , HAN K , et al. Path integration model based on multi-scale grid cell[J]. Systems Engineering and Electronics, 2021, 43 (10): 2961- 2967.
doi: 10.12305/j.issn.1001-506X.2021.10.31 |
|
| 73 | MILFORD M J, WYETH G F, PRASSER D P. RatSLAM: a hippocampal model for simultaneous localisation and mapping[C]// Proc. of the IEEE International Conference on Robotics and Automation, 2004: 403-408. |
| 74 |
BURAK Y , FIETE I R . Accurate path integration in continuous attractor network models of grid cells[J]. PLoS Computational Biology, 2009, 5 (2): e1000291.
doi: 10.1371/journal.pcbi.1000291 |
| 75 |
RIVERO-ORTEGA J D , MOSQUERA-MATURANA J S , PARDO-CABRERA J , et al. Ring attractor bio-inspired neural network for robot social navigation[J]. Frontiers in Neurorobotics, 2023, 17, 1211570.
doi: 10.3389/fnbot.2023.1211570 |
| 76 | HAYMAN R , GIULIO C , WILSON J J , et al. Grid cells on steeply sloping terrain: evidence for planar rather than volumetric encoding[J]. Frontiers in Psychology, 2015, 6, 925. |
| 77 | JEFFERY K J , WILSON J J , GIULIO C , et al. Neural encoding of large-scale three-dimensional space—properties and constraints[J]. Frontiers in Psychology, 2015, 6, 927. |
| 78 |
KIM M , MAGUIRE E A . Encoding of 3D head direction information in the human brain[J]. Hippocampus, 2019, 29 (7): 619- 629.
doi: 10.1002/hipo.23060 |
| 79 | TANG H , YAN R , TAN K C . Cognitive navigation by neuro-inspired localization, mapping, and episodic memory[J]. IEEE Trans.on Cognitive and Developmental Systems, 2017, 10 (3): 751- 761. |
| 80 | YU F W , SHANG J G , HU Y J . NeuroSLAM: a brain-inspired SLAM system for 3D environments[J]. Biological cybernetics, 2019, 113 (5): 515- 545. |
| 81 |
O'KEEFE J , RECCE M L . Phase relationship between hip-pocampal place units and the EEG theta rhythm[J]. Hippocampus, 1993, 3 (3): 317- 330.
doi: 10.1002/hipo.450030307 |
| 82 |
MOSER E I , MOSER M B . Grid cells and neural cod-ing in high-end co81rtices[J]. Neuron, 2013, 80 (3): 765- 774.
doi: 10.1016/j.neuron.2013.09.043 |
| 83 |
BARRY C , BURGESS N . Neural mechanisms of self-location[J]. Current Biology, 2014, 24 (8): 330- 339.
doi: 10.1016/j.cub.2014.02.049 |
| 84 |
BURGESS N , BARRY C , O'KEEFE J . An oscillatory interference model of grid cell firing[J]. Hippocampus, 2007, 17 (9): 801- 812.
doi: 10.1002/hipo.20327 |
| 85 |
GAUSSIER P , BANQUET J P , SARGOLINI F , et al. A model of grid cells involving extra hippocampal path integration, and the hippocampal loop[J]. Journal of Integrative Neuroscience, 2007, 6 (3): 447- 476.
doi: 10.1142/S021963520700160X |
| 86 |
SOMAN K , MURALIDHARAN V , CHAKRAVART-HY V S . A unified hierarchical oscillatory network model of head direction cells, spatially periodic cells, and place cells[J]. The European Journal of Neuroscience, 2018, 47 (10): 1266- 1281.
doi: 10.1111/ejn.13918 |
| 87 |
ZILLI E A , HASSELMO M E . Coupled noisy spiking neurons as velocity-controlled oscillators in a model of grid cell spatial firing[J]. The Journal of Neuroscience: the Official Journal of the Society for Neuroscience, 2010, 30 (41): 13850- 13860.
doi: 10.1523/JNEUROSCI.0547-10.2010 |
| 88 | KANITSCHEIDER I, FIETE I. Training recurrent networks to generate hypotheses about how the brain solves hard navigation problems[EB/OL]. [2024-03-16]. https://doi.org/10.48550/arXiv.1609.09059. |
| 89 | CUEVA C J, WEI X X. Emergence of grid-like representations by training recurrent neural networks to perform spatial localization[EB/OL]. [2024-03-16]. https://doi.org/10.48550/arXiv.1803.07770. |
| 90 |
BANINO A , BARRY C , URIA B , et al. Vector-based navigation using grid-like representations in artificial agents[J]. Nature, 2018, 557 (7705): 429- 433.
doi: 10.1038/s41586-018-0102-6 |
| 91 |
HODGKIN A L , HUXLEY A F . Currents carried by sodium and potassium ions through the membrane of the giant axon of Loligo[J]. The Journal of Physiology, 1952, 116 (4): 449- 472.
doi: 10.1113/jphysiol.1952.sp004717 |
| 92 |
MAASS W . Networks of spiking neurons: the third generation of neural network models[J]. Neural Networks, 1997, 10 (9): 1659- 1671.
doi: 10.1016/S0893-6080(97)00011-7 |
| 93 |
AT A , MG B , SRK C , et al. Deep learning in spiking neural networks[J]. Neural Networks, 2019, 111, 47- 63.
doi: 10.1016/j.neunet.2018.12.002 |
| 94 |
CHAO Y , AUGENSTEIN P , ROENNAU A , et al. Brain inspired path planning algorithms for drones[J]. Frontiers in Neurorobotics, 2023, 17, 1111861.
doi: 10.3389/fnbot.2023.1111861 |
| 95 | KREISER R, CARTIGLIA M, MARTEL J, et al. A neuromorphic approach to path integration: a head-direction spiking neural network with vision-driven reset[C]//Proc. of the IEEE International Symposium on Circuits and Systems, 2018. |
| 96 | LOBOV S A , ZHARINOV A I , MAKAROV V , et al. Spatial memory in a spiking neural network with robot embodiment[J]. S ensors, 2021, 21 (8): 2678. |
| 97 | TANG G, MICHMIZOS K P. Gridbot: an autonomous robot controlled by a spiking neural network mimicking the brain's navigational system[C]//Proc. of the International Conference on Neuromorphic Systems, 2018. |
| 98 | FLEISCHER J G , EDELMAN G M . Brain-based devices[J]. IEEE Robotics & Automation Magazine, 2009, 16 (3): 33- 41. |
| 99 | HWU T, ISBELL J, OROS N, et al. A self-driving robot using deep convolutional neural networks on neuromorphic hardware[C]//Proc. of the International Joint Conference on Neural Networks, 2017: 635-641. |
| 100 |
PEI J , DENG L , SONG S , et al. Towards artificial general intelligence with hybrid Tianjic chip architecture[J]. Nature, 2019, 572 (7767): 106- 111.
doi: 10.1038/s41586-019-1424-8 |
| 101 | LV J , TU L H . Deep learning-based visual navigation control method for autonomous trajectory of UAVs[J]. Applied Mathematics and Nonlinear Sciences, 2024, 9 (1): 1- 14. |
| 102 | 熊李艳, 舒垚淞, 曾辉, 等. 基于深度强化学习的机器人导航算法研究[J]. 华东交通大学学报, 2023, 40 (1): 67- 74. |
| XIONG L Y , SHU Y S , ZENG H , et al. Research on robot navigation algorithm based on deep reinforcement learning[J]. Journal of East China Jiaotong University, 2023, 40 (1): 67- 74. | |
| 103 |
KIM Y , BANG H . Vision-based navigation for unmanned aircraft using ground feature points and terrain elevation data[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2018, 232 (7): 1334- 1346.
doi: 10.1177/0954410017690548 |
| 104 | 尚克军, 赵亮, 张伟建, 等. 基于深度特征正射匹配的无人机视觉定位方法[J]. 中国惯性技术学报, 2024, 32 (1): 52- 57. |
| SHANG K J , ZHAO L , ZHANG J W , et al. Unmanned aerial vehicle visual localization method based on deep feature orthorectification matching[J]. Journal of Chinese Inertial Technology, 2024, 32 (1): 52- 57. | |
| 105 |
GARCÍA-PINTOS C A , ALDANA-MURILLO N G , OVALLE-MAGALLANES E , et al. A deep learning-based visual map generation for mobile robot navigation[J]. Eng-Advances in Engineering, 2023, 4 (2): 1616- 1634.
doi: 10.3390/eng4020092 |
| 106 | 董明泽, 温庄磊, 陈锡爱, 等. 安全凸空间与深度强化学习结合的机器人导航方法[EB/OL]. [2024-03-16]. http://kns.cnki.net/kcms/detail/11.2176.TJ.20240229.1058.002.html. |
| DONG M Z, WEN Z L, CHEN X A, et al. Research on robot navigation method integrating safe convex space and deep reinforcement learning[EB/OL]. [2024-03-16]. http://kns.cnki.net/kcms/detail/11.2176.TJ.20240229.1058.002.html. | |
| 107 |
CHEN G D , YAO S Y , MA J , et al. Distributed non-communicating multi-robot collision avoidance via map-based deep reinforcement learning[J]. Sensors, 2020, 20 (17): 4836.
doi: 10.3390/s20174836 |
| 108 |
HODGE V J , HAWKINS R , ALEXANDER R . Deep reinforcement learning for drone navigation using sensor data[J]. Neural Computing and Applications, 2021, 33 (6): 2015- 2033.
doi: 10.1007/s00521-020-05097-x |
| 109 | 赵菁, 赵东花, 王晨光, 等. 基于场景识别的惯性基类脑导航方法[J]. 导航与控制, 2020, 19 (4): 119- 125. |
| ZHAO J , ZHAO D H , WANG C G , et al. Inertial-based brain-like navigation strategy based on scene recognition[J]. Navigation and Control, 2020, 19 (4): 119- 125. | |
| 110 | 申冲, 刘晓杰, 王晨光, 等. 一种基于光流UWB组合的类脑导航方法[P]. 中国: CN109459025B, 2020-09-04. |
| SHEN C, LIU X J, WANG C G, et al. A brain-like navigation method based on optical flow UWB combination[P]. China: CN109459025B, 2020-09-04. | |
| 111 |
TOLMAN E C . Cognitive maps in rats and men[J]. Psychological Review, 1948, 55 (4): 189- 208.
doi: 10.1037/h0061626 |
| 112 | MONTEMERLO M, THRUN S, KOLLER D, et al. Fast-SLAM: a factored solution to the simultaneous localization and mapping problem[C]//Proc. of the 18th National Conference on Artificle Intelligence, and 14th Conference on Innovative Application of Artificle Intelligence, 2022: 593-598. |
| 113 |
GRISETTI G , STACHNISS C , BURGARD W . Improved techniques for grid mapping with rao-blackwellized particle filters[J]. IEEE Trans. on Robotics, 2007, 23 (1): 34- 46.
doi: 10.1109/TRO.2006.889486 |
| 114 | WANG H N, NI J Y, QI Y, et al. Optimal design of laser SLAM algorithm based on RBPF improved resampling technology[C]//Proc. of the IEEE International Conference on Mechatronics and Automation, 2020: 1245-1250. |
| 115 | PRITSKER A , O'REILLY J J . Simulation with visual SLAM and AweSim[J]. Computers and Mathematics with Applications, 1997, 34 (10): 137. |
| 116 | PUPILLI M, CALWAY A. Real-time visual SLAM with resilience to erratic motion[C]//Proc. of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2006: 1244-1249. |
| 117 |
ROMERORAMIREZ F J , MUÑOZSALINAS R , MARÍNJI-MÉNEZ M J , et al. sSLAM: speeded-up visual SLAM mixing artificial markers and temporary keypoints[J]. Sensors, 2023, 23 (4): 2210.
doi: 10.3390/s23042210 |
| 118 | GRAETER J, WILCZYNSKI A, LAUER M. LIMO: lidar-monocular visual odometry[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2018: 7872-7879. |
| 119 | CHENG Y, LAI J Z, ZHANG J H, et al. Research on an autonomously tightly integrated positioning method for UAV in sparse-feature indoor environment[C]//Proc. of the 15th International Bhurban Conference on Applied Sciences and Technology, 2018: 318-324. |
| 120 | LOU L , LI Y , ZHANG Q , et al. SLAM and 3D semantic reconstruction based on the fusion of lidar and monocular vision[J]. S ensors, 2023, 23 (3): 1502. |
| 121 | MONTEMERLO M, THRUN S, WHITTAKER W. Conditional particle filters for simultaneous mobile robot localization and people-tracking[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2002: 695-701. |
| 122 |
WALTER M R , EUSTICE R M , LEONARD J J . Exactly sparse extended information filters for feature-based SLAM[J]. The International Journal of Robotics Research, 2007, 26 (4): 335- 359.
doi: 10.1177/0278364906075026 |
| 123 |
MATTAR E , MUTIB K A , SULAIMAN M A , et al. Mobile robot intelligence based SLAM features learning and navigation[J]. International Journal of Computing and Digital Systems, 2018, 7 (1): 23- 34.
doi: 10.12785/ijcds/070103 |
| 124 |
CADENA C , CARLONE L , CARRILLO H , et al. Past, present, and future of simultaneous localization and mapping: toward the robust-perception age[J]. IEEE Trans.on Robotics, 2016, 32 (6): 1309- 1332.
doi: 10.1109/TRO.2016.2624754 |
| 125 |
STECKEL J , PEREMANS H . BatSLAM: simultaneous localization and mapping using biomimetic sonar[J]. PloS One, 2013, 8 (1): e54076.
doi: 10.1371/journal.pone.0054076 |
| 126 | LUAN S , GUTH F , DREWS P , et al. An open-source bio-inspired solution to underwater SLAM[J]. IFAC-PapersOnLine, 2016, 48 (2): 212- 217. |
| 127 |
MILFORD M J , WYETH G F . Mapping a suburb with a single camera using a biologically inspired SLAM system[J]. IEEE Trans.on Robotics, 2008, 24 (5): 1038- 1053.
doi: 10.1109/TRO.2008.2004520 |
| 128 | KAZMI S , MERTSCHING B . Gist+RatSLAM: an incremental bio-inspired place recognition front-end for RatSLAM[J]. EAI Endorsed Transactions on Creative Technologies, 2016, 3 (8): 3- 12. |
| 129 |
YU S M , XU H D , WU C , et al. Bionic path planning fusing episodic memory based on RatSLAM[J]. Biomimetics, 2023, 8 (1): 59- 77.
doi: 10.3390/biomimetics8010059 |
| 130 |
MILFORD M J , WILES J , WYETH G F . Solving navigational uncertainty using grid cells on robots[J]. PLoS Computational Biology, 2010, 6 (11): e1000995.
doi: 10.1371/journal.pcbi.1000995 |
| 131 |
BALL D , HEATH S , WILES J , et al. OpenRatSLAM: an open source brain-based SLAM system[J]. Autonomous Robots, 2013, 34 (3): 149- 176.
doi: 10.1007/s10514-012-9317-9 |
| 132 |
DE-SOUZA M M E , CHAVES M M , PIGNATON D F E , et al. xRatSLAM: an extensible RATSLAM computational framework[J]. Sensors, 2022, 22 (21): 8305.
doi: 10.3390/s22218305 |
| 133 | AMBRUŞ R, BORE N, FOLKESSON J, et al. Meta-rooms: building and maintaining long term spatial models in a dynamic world[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2014: 1854-1861. |
| 134 |
ARLEO A , GERSTNER W . Spatial cognition and neuro-mimetic navigation: a model of hippocampal place cell activity[J]. Biological Cybernetics, 2000, 83 (3): 287- 299.
doi: 10.1007/s004220000171 |
| 135 | MEYER J A , GUILLOT A , GIRARD B , et al. The Psikharpax project: towards building an artificial rat[J]. Robotics & Autonomous Systems, 2005, 50 (4): 211- 223. |
| 136 | GIOVANNANGELI C, GAUSSIER P. Autonomous vision-based navigation: goal-oriented action planning by transient states prediction, cognitive map building, and sensory-motor learning[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2008: 676-683. |
| 137 |
ZENG T P , TANG F Z , JI D X , et al. NeuroBayesSLAM: neurobiologically inspired Bayesian integration of multisensory information for robot navigation[J]. Neural Networks, 2020, 126, 21- 35.
doi: 10.1016/j.neunet.2020.02.023 |
| 138 | 丛明, 边雪, 刘冬, 等. 基于类脑认知与贝叶斯估计的仿生建图方法[J]. 华中科技大学学报(自然科学版), 2022, 50 (4): 33- 39. |
| CONG M , BIAN X , LIU D , et al. Bionic mapping method based on brain-inspired cognition and Bayesian estimation[J]. Huazhong University of Science & Technology (Natural Science Edition), 2022, 50 (4): 33- 39. | |
| 139 |
BAVLE H , PUENTE P , HOW J , et al. VPS-SLAM: visual planar semantic SLAM for aerial robotic systems[J]. IEEE Access, 2020, 8, 60704- 60718.
doi: 10.1109/ACCESS.2020.2983121 |
| 140 | ZHAO X , ZUO T , HU X Y . OFM-SLAM: a visual semantic SLAM for dynamic indoor environments[J]. Mathematical Problems in Engineering, 2021, 2021, 5538840. |
| 141 | YOU Y X , WEI P , CAI J L , et al. MISD-SLAM: multimodal semantic SLAM for dynamic environments[J]. Wireless Communications and Mobile Computing, 2022, 2022 (1): 11- 13. |
| 142 |
SUN L X , WEI J Y , SU S J , et al. SOLO-SLAM: a parallel semantic SLAM algorithm for dynamic scenes[J]. Sensors, 2022, 22 (18): 6977.
doi: 10.3390/s22186977 |
| 143 |
吴德伟, 何晶, 韩昆, 等. 无人作战平台认知导航及其类脑实现思想[J]. 空军工程大学学报, 2018, 19 (6): 33- 38.
doi: 10.3969/j.issn.1009-3516.2018.06.006 |
|
WU D W , HE J , HAN K , et al. Cognitive navigation and its thought of brain inspired realization in un-manned combat platform[J]. Journal of Air Force Engineering University(Natural Science Edition), 2018, 19 (6): 33- 38.
doi: 10.3969/j.issn.1009-3516.2018.06.006 |
|
| 144 | DARRAH M A, NILAND W, STOLARIK B M. Multiple UAV dynamic task allocation using mixed integer linear programming in a SEAD mission[C]//Proc. of the Infotech@Aerospace Conference, 2005. |
| 145 | NAYYAR A , LE D N , NHU N G . The handbook titled "advances in swarm intelligence for optimizing problems in computer science"[M]. New York: Chapman and Hall/CRC, 2018. |
| 146 |
SUN W F , TANG M , ZHANG L J , et al. A survey of using swarm intelligence algorithms in IoT[J]. Sensors, 2020, 20 (5): 1420.
doi: 10.3390/s20051420 |
| 147 |
NAGY M , AKOS Z , BIRO D , et al. Hierarchical group dynamics in pigeon flocks[J]. Nature, 2010, 464 (7290): 890- 893.
doi: 10.1038/nature08891 |
| 148 |
NAGY M , VASARHELYI G , PETTIT B , et al. Con-text-dependent hierarchies in pigeons[J]. Proceedings of the National Academy of Sciences, 2013, 110 (32): 13049- 13054.
doi: 10.1073/pnas.1305552110 |
| 149 | 曾子鸣, 董超, 朱小军, 等. 面向群体快速融合的仿生无人机集群架构[J]. 电信科学, 2022, 38 (8): 17- 27. |
| ZENG Z M , DONG C , ZHU X J , et al. Bionic UAV architecture for fast swarm fusion[J]. Telecommunications Science, 2022, 38 (8): 17- 27. | |
| 150 | 范林飞. 基于鸽群算法的多无人机协同编队[D]. 南京: 南京航空航天大学, 2020. |
| FAN L F. Cooperative formation of multi-UAVs based on pigeon algorithm[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2020. | |
| 151 | 杨庆, 段海滨. 仿鸿雁编队的无人机集群飞行验证[J]. 工程科学学报, 2019, 41 (12): 1599- 1608. |
| YANG Q , DUAN H B . Verification of unmanned aerial vehicle swarm behavioral mechanism underlying the formation of Anser cygnoides[J]. Chinese Journal of Engineering, 2019, 41 (12): 1599- 1608. | |
| 152 |
ZHOU X , WEN X Y , WANG Z P , et al. Swarm of micro flying robots in the wild[J]. Science Robotics, 2022, 7 (66): eabm5954.
doi: 10.1126/scirobotics.abm5954 |
| 153 |
GUPTA A , SAVARESE S , GANGULI S , et al. Embodied intelligence via learning and evolution[J]. Nature Communications, 2021, 12 (1): 5721.
doi: 10.1038/s41467-021-25874-z |
| [1] | 韩昆, 吴德伟, 来磊. 类脑导航中基于差分Hebbian学习的网格细胞构建模型[J]. 系统工程与电子技术, 2020, 42(3): 674-679. |
| [2] | 李璟璟, 张玉兔, 王文从, 胡慧君, 邵思霈. X射线源/地心矢量观测的卫星自主导航应用[J]. 系统工程与电子技术, 2018, 40(11): 2534-. |
| [3] | 徐国栋,李鹏飞,董立珉,侯天蕊. 卫星自主轨道估计方法及其高阶非线性滤波器设计[J]. 系统工程与电子技术, 2014, 36(1): 117-122. |
| [4] | 陈昊,黎明,江泽涛,储珺. 处理动态优化问题的演化元胞遗传算法[J]. Journal of Systems Engineering and Electronics, 2013, 35(5): 1115-1221. |
| [5] | 王鹏, 张迎春. 基于磁强计/太阳敏感器的自主导航方法[J]. Journal of Systems Engineering and Electronics, 2013, 35(1): 132-137. |
| [6] | 王岩, 朱齐丹, 刘志林, 杨震. 改进的稀疏孪生支持向量回归算法[J]. Journal of Systems Engineering and Electronics, 2012, 34(9): 1940-1945. |
| [7] | 梁新元. 因果图迭代推理算法研究[J]. Journal of Systems Engineering and Electronics, 2012, 34(6): 1299-1304. |
| [8] | 杨博, 张军英. 基于高斯噪声模型的马尔可夫网络构建算法[J]. Journal of Systems Engineering and Electronics, 2012, 34(5): 1041-1045. |
| [9] | 杨文博, 李少远. 基于强跟踪UKF的航天器自主导航间接量测滤波算法[J]. Journal of Systems Engineering and Electronics, 2011, 33(11): 2485-2491. |
| [10] | 焦传海, 王可人. 一种基于免疫遗传算法的认知决策引擎[J]. Journal of Systems Engineering and Electronics, 2010, 32(5): 1083-1087. |
| [11] | 赵佰亭,陈希军,曾庆双. 基于邻域粒化的小生境微粒群混合数据约简[J]. Journal of Systems Engineering and Electronics, 2010, 32(12): 2603-2607. |
| [12] | 王红滨1,刘大昕1,王念滨1,王桐2. 一种本体学习中的领域概念筛选算法[J]. Journal of Systems Engineering and Electronics, 2010, 32(1): 175-178. |
| [13] | 梁新元, 石庆喜. 带时间延迟的因果图迭代推理算法研究[J]. Journal of Systems Engineering and Electronics, 2009, 31(2): 278-282. |
| [14] | 周辉仁1,2唐万生1,牛犇. 基于递阶遗传算法的一类多旅行商问题优化[J]. Journal of Systems Engineering and Electronics, 2009, 31(11): 2630-2633 . |
| [15] | 孙晓华, 刘大昕, 徐悦竹, 张健沛. 多遍扫描KeyGraph执行模型[J]. Journal of Systems Engineering and Electronics, 2009, 31(10): 2516-2520. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||