
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (9): 3185-3197.doi: 10.12305/j.issn.1001-506X.2024.09.30
• 制导、导航与控制 • 上一篇
李晓斌, 徐东, 杨雪
收稿日期:2023-08-23
出版日期:2024-08-30
发布日期:2024-09-12
通讯作者:
李晓斌
作者简介:李晓斌 (1988—), 男, 工程师, 本科, 主要研究方向为舰船控制、多舰船编队控制Xiaobin LI, Dong XU, Xue YANG
Received:2023-08-23
Online:2024-08-30
Published:2024-09-12
Contact:
Xiaobin LI
摘要:
为满足欠驱动自主水下航行器(autonomous underwater vehicle, AUV)在复杂扰动和参数不确定条件下高性能轨迹跟踪需求, 提出预设动态性能及收敛时间的三维轨迹跟踪控制方法。首先, 对欠驱动AUV的前向位置道进行扩维, 构建面向控制的一体化多输入多输出轨迹跟踪模型。然后, 结合动态过程函数与预设时间控制理论, 建立动态性能预设轨迹跟踪控制系统, 使得AUV轨迹跟踪暂态品质可由动态过程函数直接决定, 而跟踪误差的实际收敛时间也可由单个控制参数准确预设。最后, 为避免控制奇异现象和“微分爆炸”现象, 控制系统设计过程中分别融入绝对值修正法和径向基函数网络(radial basis function neural network, RBFNN)拟合法。数值仿真结果表明, 所提出的控制方法可显著提升欠驱动AUV的抗扰性和暂态品质, 实现快速平滑的高性能三维轨迹跟踪。
中图分类号:
李晓斌, 徐东, 杨雪. 欠驱动条件下自主水下航行器轨迹跟踪动态性能预设控制[J]. 系统工程与电子技术, 2024, 46(9): 3185-3197.
Xiaobin LI, Dong XU, Xue YANG. Trajectory tracking control with predefined dynamic performance for underactuated autonomous underwater vehicle[J]. Systems Engineering and Electronics, 2024, 46(9): 3185-3197.
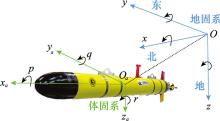
图1
体固系与地固系示意图"
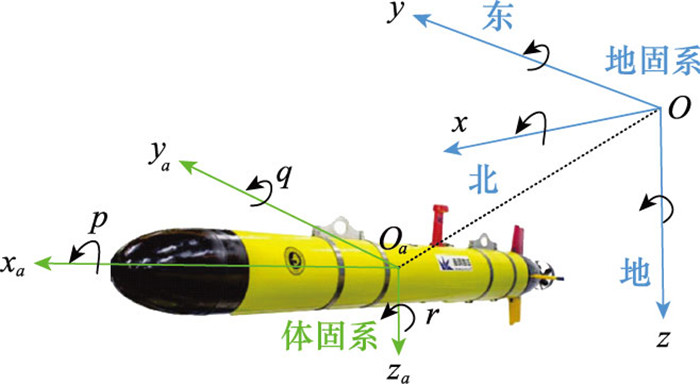
图2
动态过程函数示意图"
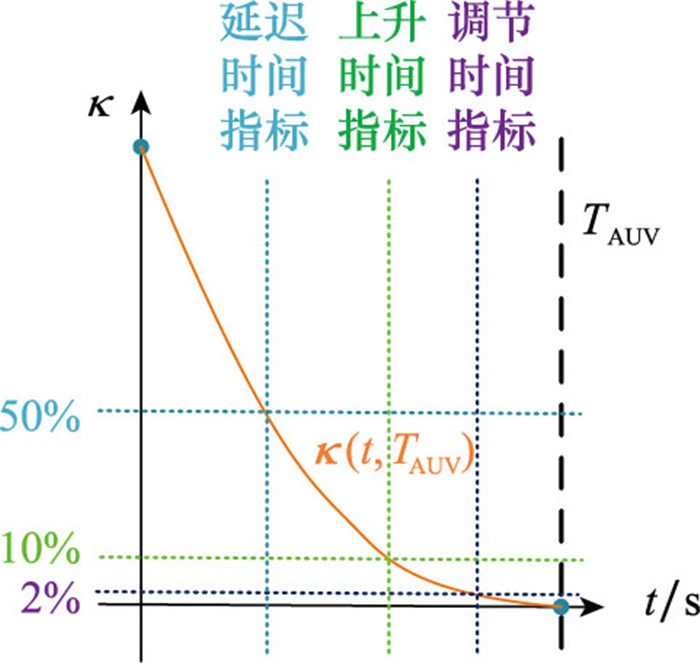
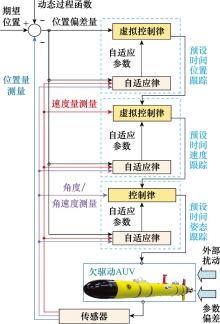
图3
控制系统结构框图"

图4
三维轨迹图"
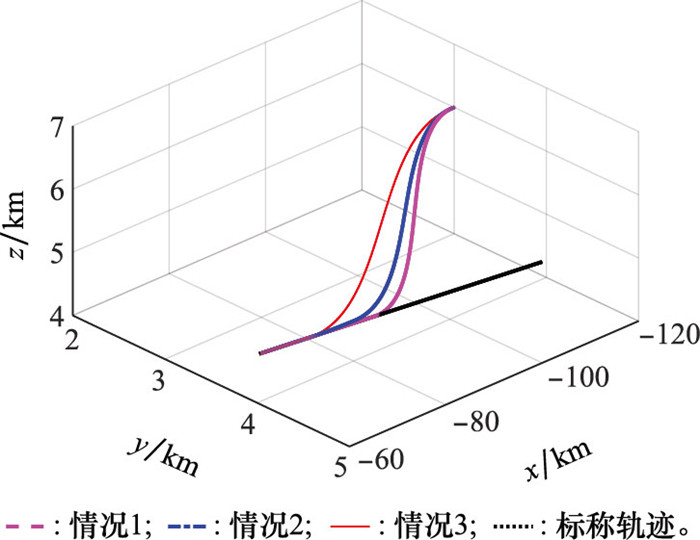
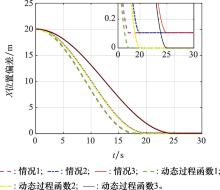
图5
全程X位置误差图"

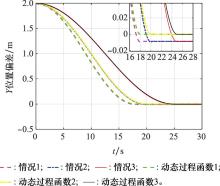
图6
全程Y位置误差图"

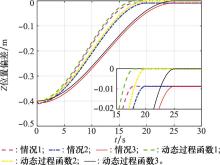
图7
全程Z位置误差图"

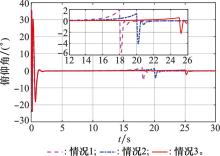
图8
全程俯仰角变化图"

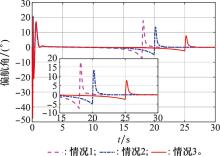
图9
全程偏航角变化图"

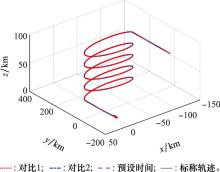
图10
三维轨迹对比图"

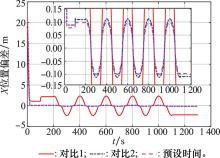
图11
全程X位置误差对比图"

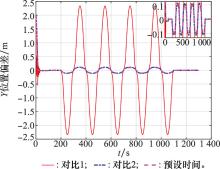
图12
全程Y位置误差对比图"
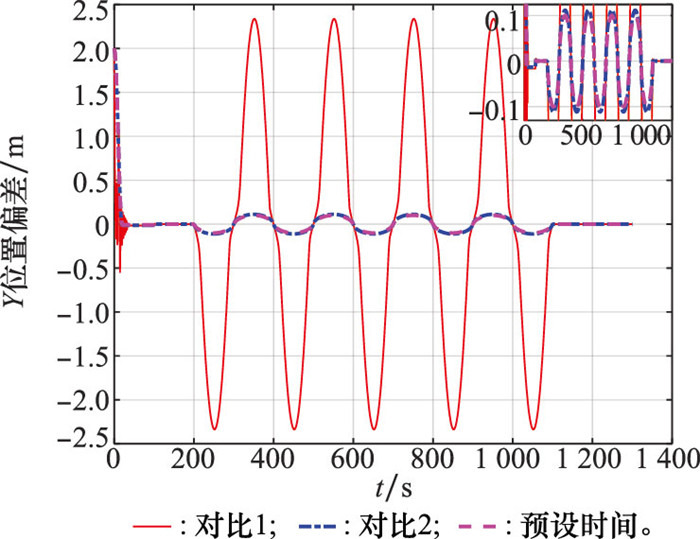
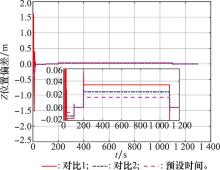
图13
全程Z位置误差对比图"

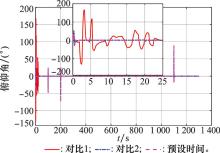
图14
俯仰角变化对比图"

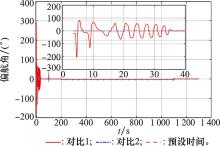
图15
偏航角变化对比图"
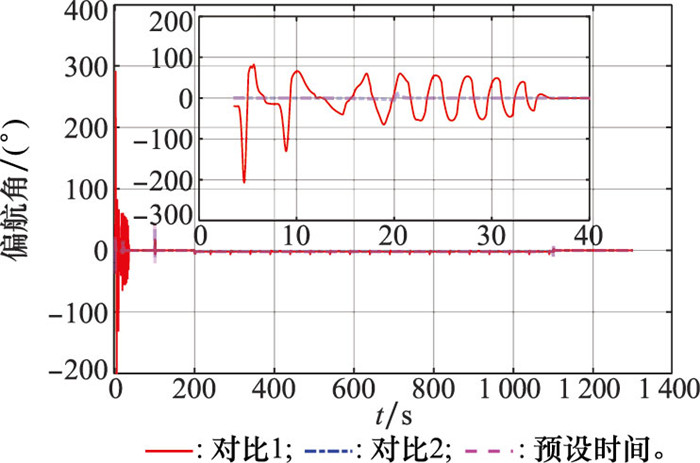
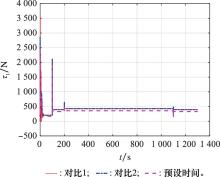
图16
X通道控制量变化对比图"

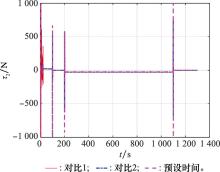
图17
Y通道控制量变化对比图"

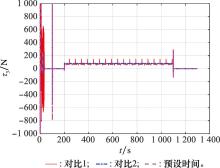
图18
Z通道控制量变化图"
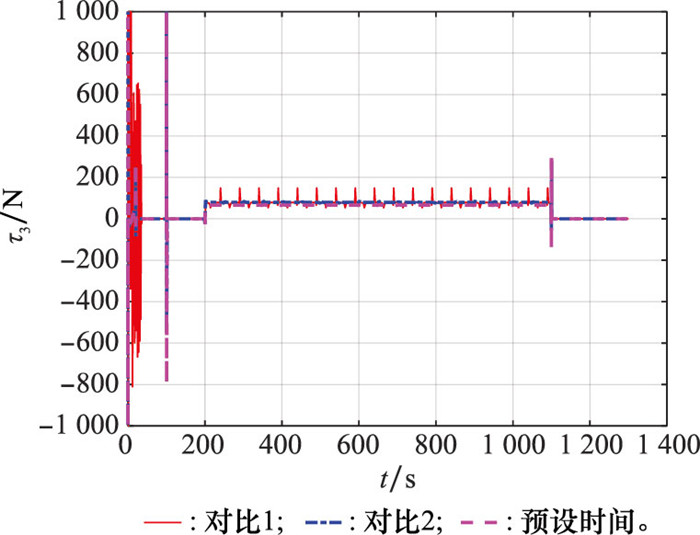
表1
平均控制量和位置误差"
| 算法 | 平均控制量/N | 平均位置误差/m |
| 本文方法 | 7.384 4e4 | 3.203 5e2 |
| 对比方法1 | 9.353 6e4 | 4.933 21e2 |
| 对比方法2 | 8.850 35e4 | 3.208 1e2 |
| 1 |
LI Z F , WANG M , MA G . Adaptive optimal trajectory tracking control of AUVs based on reinforcement learning[J]. ISA Transactions, 2023, 137, 122- 132.
doi: 10.1016/j.isatra.2022.12.003 |
| 2 | SHEN C , SHI Y , BUCKHAM B . Path-following control of an AUV: a multiobjective model predictive control approach[J]. IEEE Trans.on Control Systems Technology, 2018, 27 (3): 1334- 1342. |
| 3 |
ZHANG G C , HUANG H , QIN H D , et al. A novel adaptive second order sliding mode path following control for a portable AUV[J]. Ocean Engineering, 2018, 151, 82- 92.
doi: 10.1016/j.oceaneng.2017.12.054 |
| 4 |
REZAZADEGAN F , SHOJAEI K , SHEIKHOLESLAM F , et al. A novel approach to 6-DOF adaptive trajectory tracking control of an AUV in the presence of parameter uncertainties[J]. Ocean Engineering, 2015, 107, 246- 258.
doi: 10.1016/j.oceaneng.2015.07.040 |
| 5 |
ALI N , TAWIAH I , ZHANG W . Finite-time extended state observer based nonsingular fast terminal sliding mode control of autonomous underwater vehicles[J]. Ocean Engineering, 2020, 218, 108179.
doi: 10.1016/j.oceaneng.2020.108179 |
| 6 |
ZHANG Z Y , LIN M W , LI D J . A double-loop control framework for AUV trajectory tracking under model parameters uncertainties and time-varying currents[J]. Ocean Engineering, 2022, 265, 112566.
doi: 10.1016/j.oceaneng.2022.112566 |
| 7 | WU H M, KARKOUB M. Hierarchical backstepping control for trajectory-tracking of autonomous underwater vehicles subject to uncertainties[C]//Proc. of the IEEE 14th International Conference on Control, Automation and Systems, 2014: 1191-1196. |
| 8 |
周铸, 李文魁, 吕志彪, 等. 扰动不确定的AUV改进反步控制[J]. 舰船电子工程, 2022, 42 (12): 169- 174.
doi: 10.3969/j.issn.1672-9730.2022.12.037 |
|
ZHOU Z , LI W K , LYU Z B , et al. Improved backstepping control of uncertain AUVs under perturbations[J]. Ship Electronic Engineering, 2022, 42 (12): 169- 174.
doi: 10.3969/j.issn.1672-9730.2022.12.037 |
|
| 9 | 李娟, 王佳奇, 丁福光. 基于反馈线性化的AUV三维轨迹跟踪滑模控制[J]. 哈尔滨工程大学学报, 2022, 43 (3): 348- 355. |
| LI J , WANG J Q , DING F G . 3-D trajectory tracking sliding mode control of AUV based on feeedback linearization[J]. Journal of Harbin Engineering University, 2022, 43 (3): 348- 355. | |
| 10 | 李鑫滨, 王鹏, 骆曦, 等. 输入受限下欠驱动AUV轨迹跟踪滑模控制[J]. 水下无人系统学报, 2022, 30 (1): 44- 53. |
| LI X B , WANG P , LUO X , et al. Trajectory tracking sliding mode control of underactuated AUV with input constraints[J]. Journal of Underwater Unmanned Systems, 2022, 30 (1): 44- 53. | |
| 11 | LI J , DU J L , CHEN C L P . Command-filtered robust adaptive NN control with the prescribed performance for the 3-D trajectory tracking of underactuated AUVs[J]. IEEE Trans.on Neural Networks and Learning Systems, 2021, 33 (11): 6545- 6557. |
| 12 |
ZHANG J L , XIANG X B , ZHANG Q , et al. Neural network-based adaptive trajectory tracking control of underactuated AUVs with unknown asymmetrical actuator saturation and unknown dynamics[J]. Ocean Engineering, 2020, 218, 108193.
doi: 10.1016/j.oceaneng.2020.108193 |
| 13 |
刘用, 杨晓飞, 夏金铭. 基于模糊算法的AUV避障与姿态控制[J]. 江苏大学学报(自然科学版), 2021, 42 (6): 655- 660.
doi: 10.3969/j.issn.1671-7775.2021.06.006 |
|
LIU Y , YANG X F , XIA J M . Obstacle-avoidance and attitude control of AUV based on fuzzy algorithm[J]. Journal of Jiangsu University (Natural Science Edition), 2021, 42 (6): 655- 660.
doi: 10.3969/j.issn.1671-7775.2021.06.006 |
|
| 14 |
LIANG X , QU X R , WANG N , et al. Three-dimensional trajectory tracking of an underactuated AUV based on fuzzy dynamic surface control[J]. IET Intelligent Transport Systems, 2020, 14 (5): 364- 370.
doi: 10.1049/iet-its.2019.0347 |
| 15 |
CHEN H X , TANG G Y , WANG S F , et al. Adaptive fixed-time backstepping control for three-dimensional trajectory tracking of underactuated autonomous underwater vehicles[J]. Ocean Engineering, 2023, 275, 114109.
doi: 10.1016/j.oceaneng.2023.114109 |
| 16 |
ZHENG J Q , SONG L , LIU L Y , et al. Fixed-time extended state observer-based trajectory tracking control for autonomous underwater vehicles[J]. Asian Journal of Control, 2022, 24 (2): 686- 701.
doi: 10.1002/asjc.2624 |
| 17 |
SUN H B , ZONG G D , CUI J W , et al. Fixed-time sliding mode output feedback tracking control for autonomous underwater vehicle with prescribed performance constraint[J]. Ocean Engineering, 2022, 247, 110673.
doi: 10.1016/j.oceaneng.2022.110673 |
| 18 |
MOULAY E , LECHAPPE V , BERNUAU E , et al. Fixed-time sliding mode control with mismatched disturbances[J]. Automatica, 2022, 136, 110009.
doi: 10.1016/j.automatica.2021.110009 |
| 19 |
ZHENG J Q , SONG L , LIU L Y , et al. Fixed-time sliding mode tracking control for autonomous underwater vehicles[J]. Applied Ocean Research, 2021, 117, 102928.
doi: 10.1016/j.apor.2021.102928 |
| 20 | WANG H B, SU B, WANG Y L, et al. Fixed-time stabilization control for underactuated AUV with external disturbance[C]// Proc. of the IEEE Chinese Control Conference, 2019: 4513-4518. |
| 21 |
AN S , WANG X Y , WANG L J , et al. Observer based fixed-time integral sliding mode tracking control for underactuated AUVs via an event-triggered mechanism[J]. Ocean Engineering, 2023, 284, 115158.
doi: 10.1016/j.oceaneng.2023.115158 |
| 22 |
LIU Y , LIU X P , JING Y W . Adaptive neural networks finite-time tracking control for non-strict feedback systems via prescribed performance[J]. Information Sciences, 2018, 468, 29- 46.
doi: 10.1016/j.ins.2018.08.029 |
| 23 |
SUN Y C , ZHANG Y , QIN H D , et al. Predefined-time prescribed performance control for AUV with improved performance function and error transformation[J]. Ocean Engineering, 2023, 281, 114817.
doi: 10.1016/j.oceaneng.2023.114817 |
| 24 |
LI Y , HE J Y , ZHANG Q , et al. Predefined-time fault-tolerant trajectory tracking control for autonomous underwater vehicles considering actuator saturation[J]. Actuators, 2023, 12 (4): 171- 192.
doi: 10.3390/act12040171 |
| 25 |
LI K W , LI Y M . Adaptive predefined-time optimal tracking control for underactuated autonomous underwater vehicles[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10 (4): 1083- 1085.
doi: 10.1109/JAS.2023.123153 |
| 26 |
ZHANG L , JU X Z , CUI N G . Ascent control of heavy-lift launch vehicle with guaranteed predefined performance[J]. Aerospace Science and Technology, 2021, 110, 106511.
doi: 10.1016/j.ast.2021.106511 |
| 27 | ZHOU H P, ZHENG Z W, GUAN Z Y, et al. Control barrier function based nonlinear controller for automatic carrier landing[C]// Proc. of the IEEE 16th International Conference on Control, Automation, Robotics and Vision, 2020: 584-589. |
| 28 |
JU X Z , JIANG Y S , JING L , et al. Quantized predefined-time control for heavy-lift launch vehicles under actuator faults and rate gyro malfunctions[J]. ISA transactions, 2023, 138, 133- 150.
doi: 10.1016/j.isatra.2023.02.022 |
| 29 |
JU X Z , WEI C Z , XU H C , et al. Fractional-order sliding mode control with a predefined-time observer for VTVL reusable launch vehicles under actuator faults and saturation constraints[J]. ISA transactions, 2022, 129, 55- 72.
doi: 10.1016/j.isatra.2022.02.003 |
| 30 |
ZHANG L , LI D Y , JING L , et al. Appointed-time cooperative guidance law with line-of-sight angle constraint and time-to-go control[J]. IEEE Trans.on Aerospace and Electronic Systems, 2023, 59 (3): 3142- 3155.
doi: 10.1109/TAES.2022.3221059 |
| 31 |
CHEN Z R , JU X Z , WANG Z W , et al. The prescribed time sliding mode control for attitude tracking of spacecraft[J]. Asian Journal of Control, 2022, 24 (4): 1650- 1662.
doi: 10.1002/asjc.2569 |
| 32 | HARDY G H , LITTLEWOOD J E , PÓLYA G . Inequalities[M]. Cambridge: Cambridge university press, 1952. |
| 33 |
YANG M , ZHANG Q , XU K , et al. Adaptive differentiator-based predefined-time control for nonlinear systems subject to pure-feedback form and unknown disturbance[J]. Complexity, 2021, 2021, 7029058.
doi: 10.1155/2021/7029058 |
| 34 | NI J K , SHI P . Global predefined time and accuracy adaptive neural network control for uncertain strict-feedback systems with output constraint and dead zone[J]. IEEE Trans.on Systems, Man, and Cybernetics-Systems, 2020, 51 (12): 7903- 7918. |
| 35 |
LIU B J , WANG W C , LI Y K , et al. Adaptive quantized predefined-time backstepping control for nonlinear strict-feedback systems[J]. IEEE Trans.on Circuits and Systems Ⅱ: Express Briefs, 2022, 69 (9): 3859- 3863.
doi: 10.1109/TCSII.2022.3175739 |
| 36 |
PETTERSEN K Y , EGELAND O . Time-varying exponential stabilization of the position and attitude of an underactuated autonomous underwater vehicle[J]. IEEE Trans.on Automatic Control, 1999, 44 (1): 112- 115.
doi: 10.1109/9.739086 |
| [1] | 冯豪博, 胡桥, 赵振轶. 基于精英族系遗传算法的AUV集群路径规划[J]. 系统工程与电子技术, 2022, 44(7): 2251-2262. |
| [2] | 高永琪, 马威强, 张林森, 王鹏, 赵苗. 分布式多AUV协同搜索方法[J]. 系统工程与电子技术, 2022, 44(5): 1670-1676. |
| [3] | 马威强, 高永琪, 赵苗. 基于全局最优和差分变异的头脑风暴优化算法[J]. 系统工程与电子技术, 2022, 44(1): 270-278. |
| [4] | 杨永鹏, 赵玉新, 郝燕玲, 杜航原. AUV近水面悬浮解耦控制系统设计及仿真[J]. Journal of Systems Engineering and Electronics, 2012, 34(3): 572-577. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||