
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (9): 3070-3081.doi: 10.12305/j.issn.1001-506X.2024.09.19
• 系统工程 • 上一篇
夏雨奇, 黄炎焱, 陈恰
收稿日期:2023-09-01
出版日期:2024-08-30
发布日期:2024-09-12
通讯作者:
黄炎焱
作者简介:夏雨奇 (1997—), 男, 博士研究生, 主要研究方向为机器人控制基金资助:Yuqi XIA, Yanyan HUANG, Qia CHEN
Received:2023-09-01
Online:2024-08-30
Published:2024-09-12
Contact:
Yanyan HUANG
摘要:
在城市战场环境下, 无人侦察车有助于指挥部更好地了解目标地区情况, 提升决策准确性, 降低军事行动的威胁。目前, 无人侦察车多采用阿克曼转向结构, 传统算法规划的路径不符合无人侦察车的运动学模型。对此, 将自行车运动模型和深度Q网络相结合, 通过端到端的方式生成无人侦察车的运动轨迹。针对深度Q网络学习速度慢、泛化能力差的问题, 根据神经网络的训练特点提出基于经验分类的深度Q网络, 并提出具有一定泛化能力的状态空间。仿真实验结果表明, 相较于传统路径规划算法, 所提算法规划出的路径更符合无人侦察车的运动轨迹并提升无人侦察车的学习效率和泛化能力。
中图分类号:
夏雨奇, 黄炎焱, 陈恰. 基于深度Q网络的无人车侦察路径规划[J]. 系统工程与电子技术, 2024, 46(9): 3070-3081.
Yuqi XIA, Yanyan HUANG, Qia CHEN. Path planning for unmanned vehicle reconnaissance based on deep Q-network[J]. Systems Engineering and Electronics, 2024, 46(9): 3070-3081.

图1
DQN框架"


图2
无人侦察车的自行车模型"


图3
无人侦察车路径规划环境"


图4
无人侦察车前轮左转15°示意图"


图5
CRMDQN经验池结构"


图6
CRMDQN框架算法"


图7
无人侦察车路径规划仿真环境"

表1
无人侦察车仿真物理环境参数"
| 参数 | 取值 |
| 无人侦察车线速度vrobot/(m/s) | 5 |
| 无人侦察车前轮在车重心的距离flen/m | 0.5 |
| 无人侦察车后轮到车中心的距离rlen/m | 0.5 |
| 无人侦察车自身半径drobot/m | 0.6 |
| 无人侦察车前轮最大转向角度ωmax/(°) | ±15 |
| 激光数目n | 15 |
| 激光探测最远距离dmax/m | 7.8 |
| 无人侦察车激光与小车朝向夹角/(°) | -70, -60, -50, -40, -30, -20, -10, 0, 10, 20, 30, 40, 50, 60, 70 |
| 目标圆半径Raim/m | 1 |
| 环境刷新频率/ms | 100 |
表2
无人侦察车路径规划算法参数"
| 参数 | 取值 |
| 方向回报参数λ1 | 0.1 |
| 方向回报参数λ2 | 0.5 |
| 碰撞回报rcollision | -50 |
| 目标回报raim | 100 |
| 强化学习折扣系数γ | 0.95 |
| 强化学习贪婪因子ε | 0.01 |
| 神经网络学习率lr | 0.001 |
| 初始随机步数nstep | 5 000 |
| 学习间隔nlearn | 8 |
| 目标网络赋值间隔nweight | 10 |
| 经验池大小N | 150 000 |
| 每次训练抽取样本的数目 | 512 |
| 最大训练回合数目M | 2 500 |
| 每回合最大运行步数Tmax | 2 000 |

图8
评估网络和目标网络结构图"


图9
环境1中不同算法路线图"


图10
环境2中不同算法路线图"
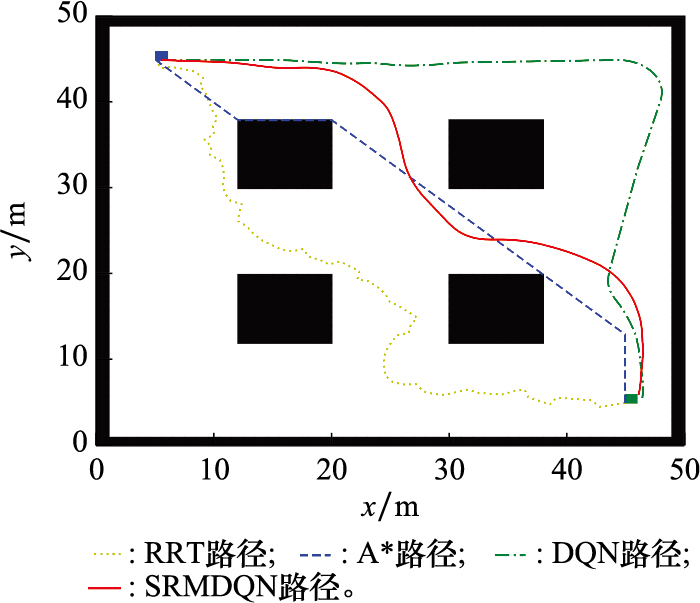

图11
环境3中不同算法路线图"


图12
环境4中不同算法路线图"

表3
不同算法路径规划长度比较"
| 环境 | 算法运行路径长度 | |||
| A* | RRT | DQN | CRMDQN | |
| 环境1 | 66.53 | 77.17 | 69.50 | 64.20 |
| 环境2 | 61.25 | 76.23 | 81.50 | 65.90 |
| 环境3 | 84.08 | 82.37 | 95.00 | 74.10 |
| 环境4 | 87.34 | 85.59 | 78.20 | 69.50 |

图13
在环境1中DQN算法和CRMDQN算法训练数据"


图14
在环境2中DQN算法和CRMDQN算法训练数据"


图15
在环境3中DQN算法和CRMDQN算法训练数据"
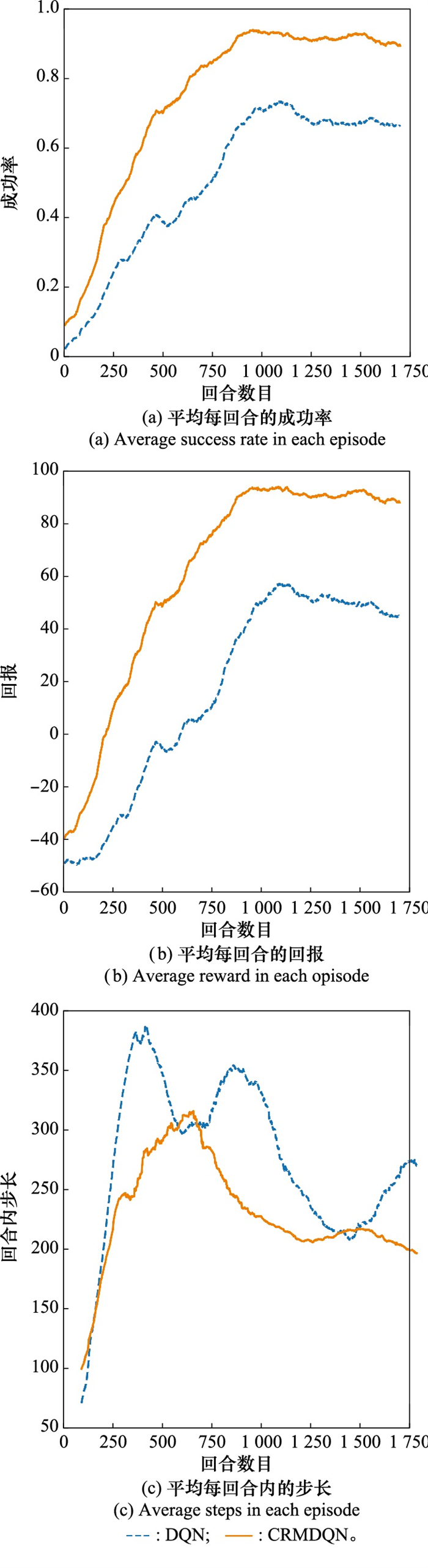

图16
在环境4中DQN算法和CRMDQN算法训练数据"

表4
DQN算法与CRMDQN算法训练速度对比"
| 环境 | 平均成功率达到80%所需回合数 | |
| DQN | CRMDQN | |
| 环境1 | 240 | 200 |
| 环境2 | 470 | 334 |
| 环境3 | 未达到 | 631 |
| 环境4 | 1 162 | 817 |
表5
DQN算法与CRMDQN算法训练结果对比"
| 环境 | 成功率 | 回报值 | |||
| DQN | CRMDQN | DQN | CRMDQN | ||
| 环境1 | 0.69 | 0.77 | 49.99 | 63.62 | |
| 环境2 | 0.81 | 0.86 | 74.32 | 80.91 | |
| 环境3 | 0.89 | 0.94 | 88.15 | 96.73 | |
| 环境4 | 0.69 | 0.77 | 49.99 | 63.62 | |

图17
载入环境1网络与未载入环境1网络的CRMDQN算法成功率"


图18
载入环境1网络与未载入环境1网络的CRMDQN算法回报值"

| 1 | WANG X C , WANG X L , WILKES D M . Machine learning-based natural scene recognition for mobile robot localization in an unknown environment[M]. Berlin: Springer, 2019. |
| 2 |
PANDA M , DAS B , SUBUDHI B , et al. A comprehensive review of path planning algorithms for autonomous underwater vehicles[J]. International Journal of Automation and Computing, 2020, 17 (3): 321- 352.
doi: 10.1007/s11633-019-1204-9 |
| 3 |
PATLE B K , PANDEY A , PARHI D R K , et al. A review: on path planning strategies for navigation of mobile robot[J]. Defence Technology, 2019, 15 (4): 582- 606.
doi: 10.1016/j.dt.2019.04.011 |
| 4 |
SANCHEZ-IBANEZ J R , PEREZ-DEL-PULGAR C J , GARCÍA-CEREZO A . Path planning for autonomous mobile robots: a review[J]. Sensors, 2021, 21 (23): 7898.
doi: 10.3390/s21237898 |
| 5 |
WAHAB A W M , NEFTI-MEZIANI S , ATYABI A . A comparative review on mobile robot path planning: classical or meta-heuristic methods?[J]. Annual Reviews in Control, 2020, 50, 233- 252.
doi: 10.1016/j.arcontrol.2020.10.001 |
| 6 |
WANG B , LIU Z , LI Q B , et al. Mobile robot path planning in dynamic environments through globally guided reinforcement learning[J]. IEEE Robotics and Automation Letters, 2020, 5 (4): 6932- 6939.
doi: 10.1109/LRA.2020.3026638 |
| 7 |
张浩杰, 张玉东, 梁荣敏, 等. 改进A * 算法的机器人能耗最优路径规划方法[J]. 系统工程与电子技术, 2023, 45 (2): 513- 520.
doi: 10.12305/j.issn.1001-506X.2023.02.23 |
|
ZHANG H J , ZHANG Y D , LIANG R M , et al. Energy-efficient path planning method for robots based on improved A * algorithm[J]. Systems Engineering and Electronics, 2023, 45 (2): 513- 520.
doi: 10.12305/j.issn.1001-506X.2023.02.23 |
|
| 8 |
李文刚, 汪流江, 方德翔, 等. 联合A * 与动态窗口法的路径规划算法[J]. 系统工程与电子技术, 2021, 43 (12): 3694- 3702.
doi: 10.12305/j.issn.1001-506X.2021.12.33 |
|
LI W G , WANG L J , FANG D X , et al. Path planning algorithm combining A * with DWA[J]. Systems Engineering and Electronics, 2021, 43 (12): 3694- 3702.
doi: 10.12305/j.issn.1001-506X.2021.12.33 |
|
| 9 | KOTHARI M , POSTLETHWAITE I . A probabilistically robust path planning algorithm for UAVs using rapidly-exploring random trees[J]. Journal of Intelligent & Robotic Systems, 2013, 71 (2): 231- 253. |
| 10 | SHI Y Y , LI Q Q , BU S Q , et al. Research on intelligent vehicle path planning based on rapidly-exploring random tree[J]. Mathematical Problems in Engineering, 2020, 2020 (1): 5910503. |
| 11 | KONATOWSKI S, PAWLOWSKI P. Ant colony optimization algorithm for UAV path planning[C]//Proc. of the 14th International Conference on Advanced Trends in Radioelecrtronics, 2018: 177-182. |
| 12 |
LIANG Y , WANG L D . Applying genetic algorithm and ant colony optimization algorithm into marine investigation path planning model[J]. Soft Computing, 2020, 24 (11): 8199- 8210.
doi: 10.1007/s00500-019-04414-4 |
| 13 | LI W H. An improved artificial potential field method based on chaos theory for UAV route planning[C]//Proc. of the 34rd Youth Academic Annual Conference of Chinese Association of Automation, 2019: 47-51. |
| 14 |
孙鹏耀, 黄炎焱, 潘尧. 基于改进势场法的移动机器人路径规划[J]. 兵工学报, 2020, 41 (10): 2106- 2121.
doi: 10.3969/j.issn.1000-1093.2020.10.021 |
|
SUN P Y , HUANG Y Y , PAN Y . Path planning of mobile robots based on improved potential field algorithm[J]. Acta Armamentarii, 2020, 41 (10): 2106- 2121.
doi: 10.3969/j.issn.1000-1093.2020.10.021 |
|
| 15 |
田洪清, 王建强, 黄荷叶, 等. 越野环境下基于势能场模型的智能车概率图路径规划方法[J]. 兵工学报, 2021, 42 (7): 1496- 1505.
doi: 10.3969/j.issn.1000-1093.2021.07.017 |
|
TIAN H Q , WANG J Q , HUANG H Y , et al. Probabilistic roadmap method for path planning of intelligent vehicle based on artificial potential field model in off-road environment[J]. Acta Armamentarii, 2021, 42 (7): 1496- 1505.
doi: 10.3969/j.issn.1000-1093.2021.07.017 |
|
| 16 | SALAMAT B, TONELLO A M. A modelling approach to generate representative UAV trajectories using PSO[C]//Proc. of the 27th European Signal Processing Conference, 2019. |
| 17 | KARNOPP D . Vehicle dynamics, stability, and control[M]. Florida: CRC Press, 2013. |
| 18 | WU Z C, SU W Z, LI J H. Multi-robot path planning based on improved artificial potential field and B-spline curve optimization[C]//Proc. of the Chinese Control Conference, 2019: 4691-4696. |
| 19 |
ESHTEHARDIAN S A , KHODAYGAN S . A continuous RRT*-based path planning method for non-holonomic mobile robots using B-spline curves[J]. Journal of Ambient Intelligence and Humanized Computing, 2023, 14 (7): 8693- 8702.
doi: 10.1007/s12652-021-03625-8 |
| 20 | WATKINS C J C H , DAYAN P . Q-learning[J]. Machine Learning, 1992, 8, 279- 292. |
| 21 | SUTTON R S , BARTO A G . Reinforcement learning: an introduction[M]. Cambridge: MIT press, 2018. |
| 22 | MNIH V, KAVUKCUOGLU K, SILVER D, et al. Playing atari with deep reinforcement learning[EB/OL]. [2023-07-01]. http://doi.org/10.48550/arXiv.1312.5602. |
| 23 |
MNIH V , KAVUKCUOGLU K , SILVER D , et al. Human-level control through deep reinforcement learning[J]. Nature, 2015, 518 (7540): 529- 533.
doi: 10.1038/nature14236 |
| 24 |
WANG Y D , HE H B , SUN C Y . Learning to navigate through complex dynamic environment with modular deep reinforcement learning[J]. IEEE Trans. on Games, 2018, 10 (4): 400- 412.
doi: 10.1109/TG.2018.2849942 |
| 25 |
DEVO A , MEZZETTI G , COSTANTE G , et al. Towards generalization in target-driven visual navigation by using deep reinforcement learning[J]. IEEE Trans. on Robotics, 2020, 36 (5): 1546- 1561.
doi: 10.1109/TRO.2020.2994002 |
| 26 |
LI B H , WU Y J . Path planning for UAV ground target tracking via deep reinforcement learning[J]. IEEE Access, 2020, 8, 29064- 29074.
doi: 10.1109/ACCESS.2020.2971780 |
| 27 | LEI X Y , ZHANG Z A , DONG P F . Dynamic path planning of unknown environment based on deep reinforcement learning[J]. Journal of Robotics, 2018, 2018 (1): 5781591. |
| 28 | 周彬, 郭艳, 李宁, 等. 基于导向强化Q学习的无人机路径规划[J]. 航空学报, 2021, 42 (9): 498- 505. |
| ZHOU B , GUO Y , LI N , et al. Path planning of UAV using guided enhancement Q-learning algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42 (9): 498- 505. | |
| 29 |
杨清清, 高盈盈, 郭玙, 等. 基于深度强化学习的海战场目标搜寻路径规划[J]. 系统工程与电子技术, 2022, 44 (11): 3486- 3495.
doi: 10.12305/j.issn.1001-506X.2022.11.24 |
|
YANG Q Q , GAO Y Y , GUO Y , et al. Target search path planning for naval battle field based on deep reinforcement learning[J]. Systems Engineering and Electronics, 2022, 44 (11): 3486- 3495.
doi: 10.12305/j.issn.1001-506X.2022.11.24 |
|
| 30 | RAJAMANI R . Vehicle dynamics and control[M]. Berlin: Springer Science & Business Media, 2011. |
| 31 | OTTERLO M , WIERING M . Reinforcement learning and Markov decision processes[M]. Berlin: Springer, 2012. |
| 32 | SNIDER J M. Automatic steering methods for autonomous automobile path tracking[R]. Pittsburgh: Robotics Institute, Carnegie Mellon University, 2009. |
| [1] | 张庭瑜, 曾颖, 李楠, 黄洪钟. 基于深度强化学习的航天器功率-信号复合网络优化算法[J]. 系统工程与电子技术, 2024, 46(9): 3060-3069. |
| [2] | 费博雯, 包卫东, 刘大千, 朱晓敏. 面向动态目标搜索与打击的空地协同自主任务分配方法[J]. 系统工程与电子技术, 2024, 46(7): 2346-2358. |
| [3] | 郭宏达, 娄静涛, 徐友春, 叶鹏, 李永乐, 陈晋生. 基于MADDPG的多无人车协同事件触发通信[J]. 系统工程与电子技术, 2024, 46(7): 2525-2533. |
| [4] | 李杰, 谭跃进. 基于集成改进蚁群算法的作战环推荐方法[J]. 系统工程与电子技术, 2024, 46(6): 2002-2012. |
| [5] | 孙家玮, 余明晖, 杨大鹏, 汤皓泉, 卞大鹏. 基于CL-RRT与MPC的舰载机牵引系统路径规划[J]. 系统工程与电子技术, 2024, 46(5): 1745-1755. |
| [6] | 隋东, 杨振宇, 丁松滨, 周婷婷. 基于EMSDBO算法的无人机三维航迹规划[J]. 系统工程与电子技术, 2024, 46(5): 1756-1766. |
| [7] | 张梦钰, 豆亚杰, 陈子夷, 姜江, 杨克巍, 葛冰峰. 深度强化学习及其在军事领域中的应用综述[J]. 系统工程与电子技术, 2024, 46(4): 1297-1308. |
| [8] | 刘钢, 安志镖, 张茂军, 刘煜, 李武. 基于连续路网环境的实体化主体路径规划算法[J]. 系统工程与电子技术, 2024, 46(4): 1346-1356. |
| [9] | 赵贵祥, 周健, 李云淼, 王晨旭. 改进双向快速搜索随机树的无人艇路径规划[J]. 系统工程与电子技术, 2024, 46(4): 1364-1371. |
| [10] | 李彦铃, 罗飞舟, 葛致磊. 基于鲁棒观测器的深度强化学习垂直起降运载器姿态稳定研究[J]. 系统工程与电子技术, 2024, 46(3): 1038-1047. |
| [11] | 李广强, 董文超, 朱大庆, 于越, 陈浩, 于双和. 基于改进鲸鱼优化算法的AUV三维路径规划[J]. 系统工程与电子技术, 2023, 45(7): 2170-2182. |
| [12] | 吴冯国, 陶伟, 李辉, 张建伟, 郑成辰. 基于深度强化学习算法的无人机智能规避决策[J]. 系统工程与电子技术, 2023, 45(6): 1702-1711. |
| [13] | 刘瑶, 夏阳升, 石建迈, 陈超, 黄金才. 车载多无人机协同多区域覆盖路径规划方法[J]. 系统工程与电子技术, 2023, 45(5): 1380-1390. |
| [14] | 唐进, 梁彦刚, 白志会, 黎克波. 基于DQN的旋翼无人机着陆控制算法[J]. 系统工程与电子技术, 2023, 45(5): 1451-1460. |
| [15] | 韩维, 刘子玄, 苏析超, 崔凯凯, 刘洁. 结合启发式与最优控制的舰载机甲板路径规划算法[J]. 系统工程与电子技术, 2023, 45(4): 1098-1110. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||