
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (9): 2902-2915.doi: 10.12305/j.issn.1001-506X.2024.09.02
单靖原1, 卢雨2,*, 凌寒羽3
收稿日期:2023-11-22
出版日期:2024-08-30
发布日期:2024-09-12
通讯作者:
卢雨
作者简介:单靖原(2003—), 男, 本科生, 主要研究方向为抗干扰通信、外辐射源雷达、多目标跟踪基金资助:Jingyuan SHAN1, Yu LU2,*, Hanyu LING3
Received:2023-11-22
Online:2024-08-30
Published:2024-09-12
Contact:
Yu LU
摘要:
针对未知杂波环境下机载外辐射源雷达的多目标跟踪问题, 提出一种鲁棒自适应的标签多伯努利滤波器。首先基于标签多伯努利滤波器算法框架对多目标跟踪问题进行建模, 然后针对目标新生参数、杂波参数以及目标检测概率未知的问题, 提出采用量测驱动的目标新生模型和基于势均衡多目标多伯努利估计器的在线参数估计方法, 最后考虑到机载外辐射源雷达量测的非线性, 采用序贯蒙特卡罗方法对所提算法进行实现。实验结果表明, 所提滤波器能够利用外辐射源量测准确估计多目标航迹, 且在未知杂波环境下的性能可以逼近杂波参数已知的广义标签多伯努利滤波器, 鲁棒性更好。
中图分类号:
单靖原, 卢雨, 凌寒羽. 鲁棒自适应的机载外辐射源雷达多目标跟踪算法[J]. 系统工程与电子技术, 2024, 46(9): 2902-2915.
Jingyuan SHAN, Yu LU, Hanyu LING. Robust adaptive multi-target tracking algorithm for airborne passive bistatic radar[J]. Systems Engineering and Electronics, 2024, 46(9): 2902-2915.

图1
二维空间内的APBR几何示意图"


图2
标准LMB滤波器流程图"


图3
RA-LMB滤波器流程图"

表1
目标、外辐射源及机载接收机的初始状态(仿真场景1)"
| 仿真对象 | 初始状态 | 存活时段/s |
| 目标1 | (-14 950 m, 150 m/s, 12 550 m, -65 m/s) | 1~90 |
| 目标2 | (-15 050 m, 120 m/s, 12 450 m, -15 m/s) | 5~100 |
| 目标3 | (10 550 m, -25 m/s, 16 550 m, 100 m/s) | 10~90 |
| 目标4 | (10 450 m, -130 m/s, 16 550 m, -85 m/s) | 10~75 |
| 目标5 | (5 950 m, -100 m/s, 4 450 m, 120 m/s) | 15~80 |
| 目标6 | (6 050 m, -140 m/s, 4 450 m, 80 m/s) | 20~75 |
| 目标7 | (-12 450 m, 150 m/s, 5 950 m, 80 m/s) | 30~90 |
| 目标8 | (-12 550 m, 120 m/s, 6 050 m, 20 m/s) | 50~100 |
| T1 | (0 m, 0 m/s, 18 000 m, 0 m/s) | - |
| T2 | (15 000 m, 0 m/s, 10 000 m, 0 m/s) | - |
| T3 | (-15 000 m, 0 m/s, 1 000 m, 0 m/s) | - |
| R | (-10 000 m, 200 m/s, 1 000 m, 10 m/s) | - |

图4
APBR跟踪多个匀速直线运动目标的场景"


图5
杂波率和检测概率的估计结果(仿真场景1)"
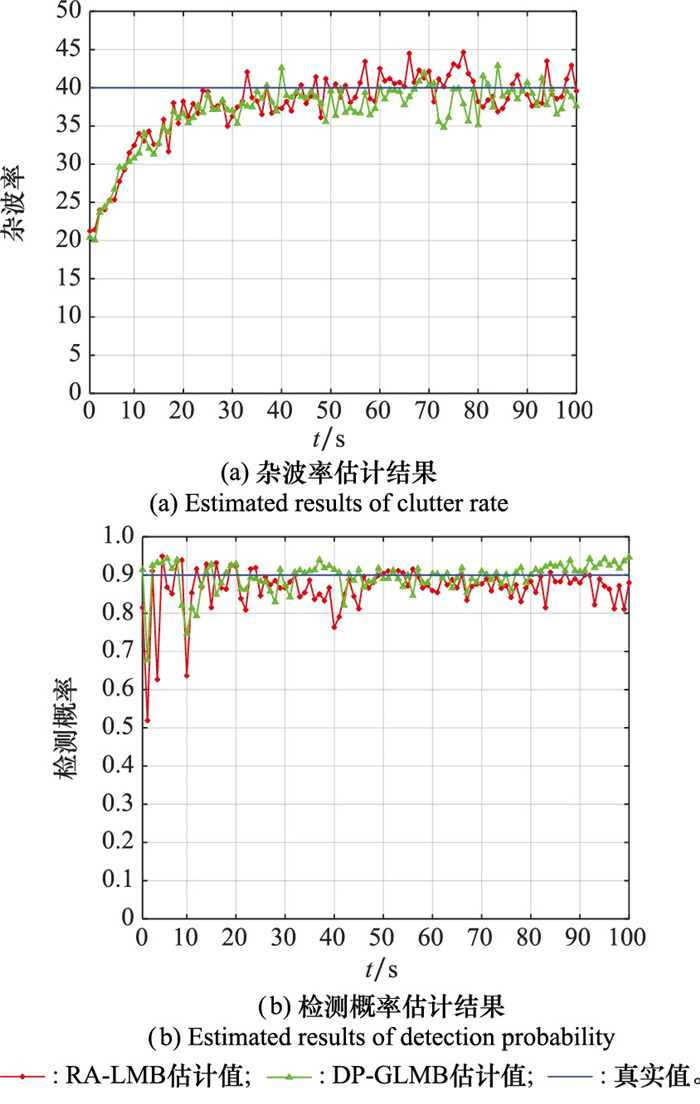
表2
杂波率和目标检测概率的估计平均值(仿真场景1)"
| 算法 | 杂波率估计平均值 | 检测概率估计平均值 |
| RA-LMB | 37.67 | 0.89 |
| DP-GLMB | 36.75 | 0.86 |
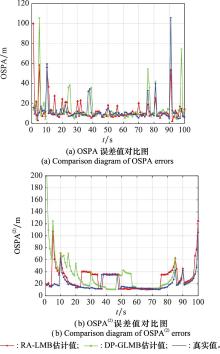
图6
OSPA和OSPA(2)误差对比图(仿真场景1)"


图7
不同滤波器的目标数估计对比图(仿真场景1)"

表3
目标、外辐射源及机载接收机的初始状态(仿真场景2)"
| 仿真对象 | 初始状态 | 转弯率(rad/s) | 存活时段/s |
| 目标1 | (-14 950 m, 150 m/s, 12 550 m, -65 m/s) | π/1 080 | 1~90 |
| 目标2 | (-15 050 m, 120 m/s, 12 450 m, -15 m/s) | π/360 | 5~100 |
| 目标3 | (10 550 m, -25 m/s, 16 550 m, -100 m/s) | π/1 080 | 10~90 |
| 目标4 | (10 450 m, -130 m/s, 16 550 m, -85 m/s) | -π/360 | 10~75 |
| 目标5 | (5 950 m, -100 m/s, 4 450 m, 120 m/s) | -π/1 080 | 15~80 |
| 目标6 | (6 050 m, -140 m/s, 4 450 m, 80 m/s) | π/270 | 20~75 |
| 目标7 | (-12 450 m, 150 m/s, 5 950 m, 80 m/s) | -π/540 | 30~90 |
| 目标8 | (-12 550 m, 120 m/s, 6 050 m, 120 m/s) | π/180 | 50~100 |
| T1 | (0 m, 0 m/s, 18 000 m, 0 m/s) | — | - |
| T2 | (15 000 m, 0 m/s, 10 000 m, 0 m/s) | — | - |
| T3 | (-15 000 m, 0 m/s, 1 000 m, 0 m/s) | — | - |
| R | (-10 000 m, 200 m/s, 1 000 m, 10 m/s) | — | - |
图8
APBR跟踪多个CT运动目标的场景"
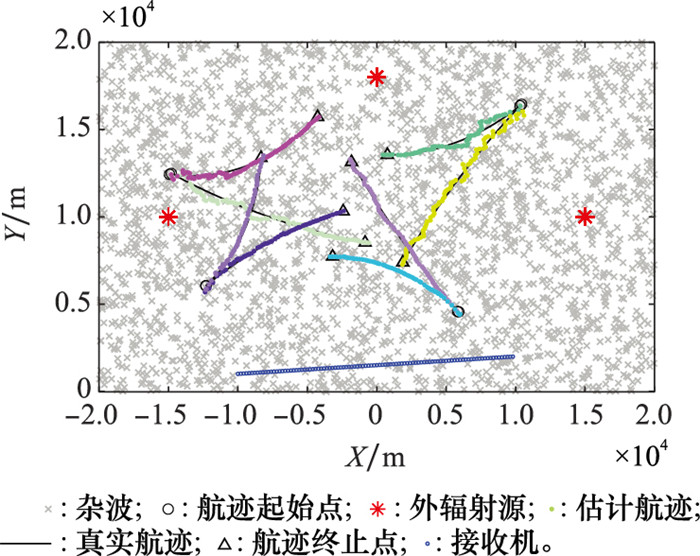

图9
杂波率和检测概率的估计结果(仿真场景2)"

表4
杂波率和目标检测概率的估计平均值(仿真场景2)"
| 算法 | 杂波率估计平均值 | 检测概率估计平均值 |
| RA-LMB | 36.81 | 0.89 |
| DP-GLMB | 36.61 | 0.88 |

图10
OSPA和OSPA(2)对比图(仿真场景2)"


图11
不同滤波器的目标数估计对比图(仿真场景2)"

| 1 |
PAINE S , O'HAGAN D W , INGGS M , et al. Evaluating the performance of FM-Based PCL radar in the presence of jamming[J]. IEEE Trans.on Aerospace and Electronic Systems, 2019, 55 (2): 631- 643.
doi: 10.1109/TAES.2018.2858158 |
| 2 | MAHFOUDIA O , HORLIN F , NEYT X . Pilot-based detection for DVB-T passive coherent location radars[J]. IET Radar, Sonar & Navigation, 2020, 14 (6): 845- 851. |
| 3 | KAISER S A , CHRISTIANSON A J , NARAYANAN R M . Global positioning system processing methods for GPS passive coherent location[J]. IET Radar, Sonar & Navigation, 2017, 11 (9): 1406- 1416. |
| 4 |
COLONE F , MARTELLI T , BONGIOANNI C , et al. WiFi-based PCL for monitoring private airfields[J]. IEEE Aerospace and Electronic Systems Magazine, 2017, 32 (2): 22- 29.
doi: 10.1109/MAES.2017.160022 |
| 5 | 万显荣, 易建新, 占伟杰, 等. 基于多照射源的被动雷达研究进展与发展趋势[J]. 雷达学报, 2020, 9 (6): 939- 958. |
| WAN X R , YI J X , ZHAN W J , et al. Research progress and development trend of the multi-illuminator-based passive radar[J]. Journal of Radars, 2020, 9 (6): 939- 958. | |
| 6 |
COLONE F , FILIPPINI F , PASTINA D . Passive radar: past, present, and future challenges[J]. IEEE Aerospace and Electronic Systems Magazine, 2023, 38 (1): 54- 69.
doi: 10.1109/MAES.2022.3221685 |
| 7 |
SUI J X , WANG J , ZUO L , et al. Cascaded least square algorithm for strong clutter removal in airborne passive radar[J]. IEEE Trans.on Aerospace and Electronic Systems, 2022, 58 (1): 679- 696.
doi: 10.1109/TAES.2021.3103705 |
| 8 | ROSENBERG L , DUK V . Land clutter statistics from an airborne passive bistatic radar[J]. IEEE Trans.on Geoscience and Remote Sensing, 2022, 60, 5104009. |
| 9 |
WOJACZEK P , COLONE F , CRISTALLINI D , et al. Reciprocal- filter-based STAP for passive radar on moving platforms[J]. IEEE Trans.on Aerospace and Electronic Systems, 2019, 55 (2): 967- 988.
doi: 10.1109/TAES.2018.2867688 |
| 10 |
郭云飞, 钱文杲, 袁继成. 基于KLD-JPDA的多目标无源协同定位算法[J]. 传感技术学报, 2020, 33 (6): 889- 894.
doi: 10.3969/j.issn.1004-1699.2020.06.016 |
|
GUO Y F , QIAN W G , YUAN J C . A KLD-JPDA based multitarget passive coherent location algorithm[J]. Chinese Journal of Sensors and Actuators, 2020, 33 (6): 889- 894.
doi: 10.3969/j.issn.1004-1699.2020.06.016 |
|
| 11 |
郭云飞, 滕方成, 曾泽斌. 基于QS-ML-PMHT的多目标无源协同定位方法[J]. 传感技术学报, 2016, 29 (11): 1753- 1758.
doi: 10.3969/j.issn.1004-1699.2016.11.021 |
|
GUO Y F , TENG F C , ZENG Z B . A QS-ML-PMHT based multitarget passive coherent location method[J]. Chinese Journal of Sensors and Actuators, 2016, 29 (11): 1753- 1758.
doi: 10.3969/j.issn.1004-1699.2016.11.021 |
|
| 12 |
李晓花, 李亚安, 金海燕, 等. 三维数据关联情况下外辐射源雷达多目标跟踪研究[J]. 电子与信息学报, 2021, 43 (10): 2840- 2847.
doi: 10.11999/JEIT210620 |
|
LI X H , LI Y A , JIN H Y , et al. Multi-static passive radar multi-target tracking under target-measurement-illuminator data association uncertainty[J]. Journal of Electronics & Information Technology, 2021, 43 (10): 2840- 2847.
doi: 10.11999/JEIT210620 |
|
| 13 | 曾雅俊, 王俊, 魏少明, 等. 分布式多传感器多目标跟踪方法综述[J]. 雷达学报, 2023, 12 (1): 197- 213. |
| ZENG Y J , WANG J , WEI S M , et al. Review of the method for distributed multi-sensor multi-target tracking[J]. Journal of Radars, 2023, 12 (1): 197- 213. | |
| 14 |
LI G , BATTISTELLI G , CHISCI L , et al. Distributed joint detection, tracking, and classification via labeled multi-Bernoulli filtering[J]. IEEE Trans.on Cybernetics, 2024, 54 (3): 1429- 1441.
doi: 10.1109/TCYB.2022.3208038 |
| 15 |
VO B N , VO B T , PHUNG D . Labeled random finite sets and the Bayes multi-target tracking filter[J]. IEEE Trans.on Signal Processing, 2014, 62 (24): 6554- 6567.
doi: 10.1109/TSP.2014.2364014 |
| 16 | KAI D , TIANCHENG L , YONGFENG Z , et al. Recent advances in multi-sensor multitarget tracking using random finite set[J]. Frontiers of Information Technology & Electronic Engineering, 2021, 22 (1): 5- 25. |
| 17 | PIKORA K, EHLERS F. Analysis of the FKIE passive radar data set with GMPHD and GMCPHD[C]//Proc. of the 16th International Conference on Information Fusion, 2013: 272-279. |
| 18 | 郭云飞, 潘金星, 才智. 基于多帧杂波稀疏度估计的无源协同定位[J]. 控制理论与应用, 2018, 35 (7): 981- 987. |
| GUO Y F , PAN J X , CAI Z . Passive coherent location with multi-scan clutter sparsity estimation[J]. Control Theory & Applications, 2018, 35 (7): 981- 987. | |
| 19 | BERTHILLOT C, SANTORI A, RABASTE O, et al. DVB-T airborne passive radar: clutter analysis and experimental results[C]//Proc. of the IEEE Radar Conference, 2019. |
| 20 | YANG P C, TU Z L, YANG J H. A robust space-time clutter cancellation algorithm for airborne passive radar[C]//Proc. of the IEEE International Conference on Signal, Information and Data Processing, 2019. |
| 21 | DUK V, CRISTALLINI D, WOJACZEK P, et al. Statistical analysis of clutter for passive radar on an airborne platform[C]// Proc. of the International Radar Conference, 2019. |
| 22 |
MAHLER R P S , VO B T , VO B N . CPHD filtering with unknown clutter rate and detection profile[J]. IEEE Trans.on Signal Processing, 2011, 59 (8): 3497- 3513.
doi: 10.1109/TSP.2011.2128316 |
| 23 |
GUO Y , THARMARASA R , KIRUBARAJAN T , et al. Passive coherent location with unknown transmitter states[J]. IEEE Trans.on Aerospace and Electronic Systems, 2017, 53 (1): 148- 168.
doi: 10.1109/TAES.2017.2649739 |
| 24 |
VO B T , VO B N . Labeled random finite sets and multi-object conjugate priors[J]. IEEE Trans.on Signal Processing, 2013, 61 (13): 3460- 3475.
doi: 10.1109/TSP.2013.2259822 |
| 25 |
REUTER S , VO B T , VO B N , et al. The labeled multi-Bernoulli filter[J]. IEEE Trans.on Signal Processing, 2014, 62 (12): 3246- 3260.
doi: 10.1109/TSP.2014.2323064 |
| 26 |
JING T , TIAN W , HUANG G M , et al. Observability and estimability of passive radar with unknown illuminator states using different observations[J]. Journal of Systems Engineering and Electronics, 2020, 31 (6): 1193- 1205.
doi: 10.23919/JSEE.2020.000092 |
| 27 |
RISTIC B , CLARK D , VO B N , et al. Adaptive target birth intensity for PHD and CPHD filters[J]. IEEE Trans.on Aerospace and Electronic Systems, 2012, 48 (2): 1656- 1668.
doi: 10.1109/TAES.2012.6178085 |
| 28 |
CHEN X , THARMARASA R , PELLETIER M , et al. Integrated clutter estimation and target tracking using Poisson point processes[J]. IEEE Trans.on Aerospace and Electronic Systems, 2012, 48 (2): 1210- 1235.
doi: 10.1109/TAES.2012.6178058 |
| 29 |
VO B T , VO B N , HOSEINNEZHAD R , et al. Robust multi-Bernoulli filtering[J]. IEEE Journal of Selected Topics in Signal Processing, 2013, 7 (3): 399- 409.
doi: 10.1109/JSTSP.2013.2252325 |
| 30 |
VO B T , VO B N , CANTONI A . The cardinality balanced multi-target multi-Bernoulli filter and its implementations[J]. IEEE Trans.on Signal Processing, 2009, 57 (2): 409- 423.
doi: 10.1109/TSP.2008.2007924 |
| 31 |
DO C T , DAT NGUYEN T T , MORATUWAGE D , et al. Multi-object tracking with an adaptive generalized labeled multi- Bernoulli filter[J]. Signal Processing, 2022, 196, 108532.
doi: 10.1016/j.sigpro.2022.108532 |
| 32 |
VO B N , VO B T , HOANG H G . An efficient implementation of the generalized labeled multi-Bernoulli filter[J]. IEEE Trans.on Signal Processing, 2017, 65 (8): 1975- 1987.
doi: 10.1109/TSP.2016.2641392 |
| 33 |
BEARD M , VO B T , VO B N . A solution for large-scale multi-object tracking[J]. IEEE Trans.on Signal Processing, 2020, 68, 2754- 2769.
doi: 10.1109/TSP.2020.2986136 |
| [1] | 江林海, 龚柏春, 刘传凯, YANG Yang, 张仁勇. 天基分布式无源探测的空间多目标跟踪方法[J]. 系统工程与电子技术, 2024, 46(8): 2789-2797. |
| [2] | 姚思亦, 李万春, 高林, 张花国, 胡航玮. 基于分布式PMHT的多传感器多目标跟踪[J]. 系统工程与电子技术, 2024, 46(7): 2184-2190. |
| [3] | 卓娅玲, 李响, 左磊, 胡娟. 随机数据丢包情况下组网雷达功率分配算法[J]. 系统工程与电子技术, 2024, 46(6): 1957-1966. |
| [4] | 齐美彬, 庄硕, 胡晶晶, 杨艳芳, 胡元奎. 基于联合GLMB滤波器的可分辨群目标跟踪[J]. 系统工程与电子技术, 2024, 46(4): 1212-1219. |
| [5] | 曾舒雅, 饶彬. 基于动力学守恒定律的弹道目标关联方法[J]. 系统工程与电子技术, 2024, 46(2): 684-691. |
| [6] | 毕文豪, 周杰, 张安, 刘力. 杂波环境下基于最大熵模糊聚类的JPDA算法[J]. 系统工程与电子技术, 2023, 45(7): 1920-1927. |
| [7] | 刘政玮, 陈映, 鲁耀兵. 适用于多目标轨迹小角度交叉的PHD滤波器[J]. 系统工程与电子技术, 2023, 45(4): 982-990. |
| [8] | 饶云华, 朱华梁, 郑志杰. 基于合作目标的外辐射源雷达发射站直接定位[J]. 系统工程与电子技术, 2023, 45(2): 394-400. |
| [9] | 杨文彬, 李旦, 张建秋. 随机有限集推理动目标轨迹的相干累积检测法[J]. 系统工程与电子技术, 2023, 45(12): 3781-3791. |
| [10] | 安雷, 李召瑞, 吉兵. 杂波环境下可移动主被动传感器长时调度方法[J]. 系统工程与电子技术, 2023, 45(1): 165-174. |
| [11] | 侯子林, 程婷, 彭瀚. 基于量测转换序贯滤波的GMPHD机动目标跟踪[J]. 系统工程与电子技术, 2022, 44(8): 2474-2482. |
| [12] | 翟光, 王妍欣, 孙一勇. 基于低轨星网的多目标协同跟踪滤波技术[J]. 系统工程与电子技术, 2022, 44(6): 1957-1967. |
| [13] | 辛怀声, 曹晨. 基于交互多模型的分组δ-广义标签多伯努利算法[J]. 系统工程与电子技术, 2022, 44(4): 1128-1138. |
| [14] | 宋子壮, 杨嘉伟, 张东方, 王诗强, 张硕. 基于无锚框的红外多类别多目标实时跟踪网络[J]. 系统工程与电子技术, 2022, 44(2): 401-409. |
| [15] | 占伟杰, 万显荣, 易建新, 谢德强, 程丰, 饶云华. 外辐射源雷达目标扇叶微多普勒效应实验研究[J]. 系统工程与电子技术, 2021, 43(6): 1468-1476. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||