Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (6): 1269-1285.doi: 10.23919/JSEE.2022.000147
• • 上一篇
-
收稿日期:2021-10-28出版日期:2022-12-18发布日期:2022-12-24
Dynamic affine formation control of networked under-actuated quad-rotor UAVs with three-dimensional patterns
Yang XU1,2( ), Weiming ZHENG3(), Delin LUO3,*(), Haibin DUAN4()
), Weiming ZHENG3(), Delin LUO3,*(), Haibin DUAN4()
- 1 School of Civil Aviation, Northwestern Polytechnical University, Xi’an 710072, China
2 Yangtze River Delta Research Institute, Northwestern Polytechnical University, Taicang 215400, China
3 School of Aerospace Engineering, Xiamen University, Xiamen 361102, China
4 School of Automation Science and Electrical Engineering, Beihang University, Beijing 100191, China
-
Received:2021-10-28Online:2022-12-18Published:2022-12-24 -
Contact:Delin LUO E-mail:yang.xu@nwpu.edu.cn;zwming@stu.xmu.edu.cn;luodelin1204@xmu.edu.cn;hbduan@buaa.edu.cn -
About author:
XU Yang was born in 1987. He received his Ph.D. degree from Xiamen University, Xiamen, China, in 2019. He has been a visiting Ph.D. student at National University of Singapore from 2016 to 2018, and a research fellow at Westlake University from 2019 to 2020. Now, he is an associate professor in School of Civil Aviation, Northwestern Polytechnical University. His research interests include control theory and application of multiple robotic systems. E-mail: yang.xu@nwpu.edu.cn
ZHENG Weiming was born in 1997. He received his B.S. degree from Fuzhou University, Fuzhou, China, in 2019. He is currently pursuing his M.S. degree in Xiamen University, Xiamen, China. His research interests include cooperative control of multiple UAVs and sliding mode control. E-mail: zwming@stu.xmu.edu.cn
LUO Delin was born in 1968. He received his B.S. degree in control engineering from Harbin Institute of Technology, China, in 1991, and M.S. and Ph.D. degrees in navigation, guidance, and control from Nanjing University of Aeronautics and Astronautics, China, in 2002 and 2006, respectively. He is a full professor in Department of Automation, School of Aerospace Engineering, Xiamen University. His research interests include guidance and control, cooperative control of multiple unmanned aerial vehicles, and computational intelligence. E-mail: luodelin1204@xmu.edu.cn
DUAN Haibin was born in 1976. He received his Ph.D. degree from Nanjing University of Aeronautics and Astronautics (NUAA) in 2005. He was an academic visitor of National University of Singapore in 2007, a senior visiting scholar of The University of Suwon of South Korea in 2011. He is currently a full professor of School of Automation Science and Electrical Engineering, Beihang University, Beijing, China. He is currently an IEEE Senior Member and IFAC TC7.5 Technical Committee Member. His current research interests include bio-inspired computation, advanced flight control, and biological computer vision. E-mail: hbduan@buaa.edu.cn -
Supported by:This work was supported by the National Natural Science Foundation of China (61673327), the Industrial Development and Foster Project of Yangtze River Delta Research Institute of NPU, Taicang (CY20210202), the Fundamental Research Funds for the Central Universities (G2021KY05116;G2022WD01026), and the Basic Research Programs of Taicang (TC2021JC28)
引用本文
. [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1269-1285.
Yang XU, Weiming ZHENG, Delin LUO, Haibin DUAN. Dynamic affine formation control of networked under-actuated quad-rotor UAVs with three-dimensional patterns[J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1269-1285.
"
| Symbol | Description |
| | The |
| | Undirected graph |
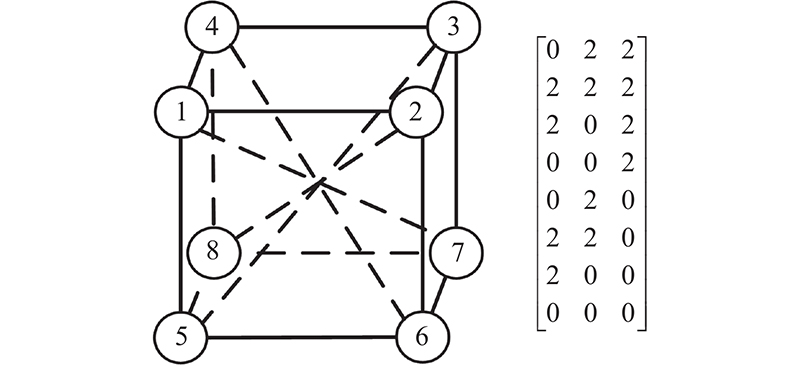
| | Stress matrix |
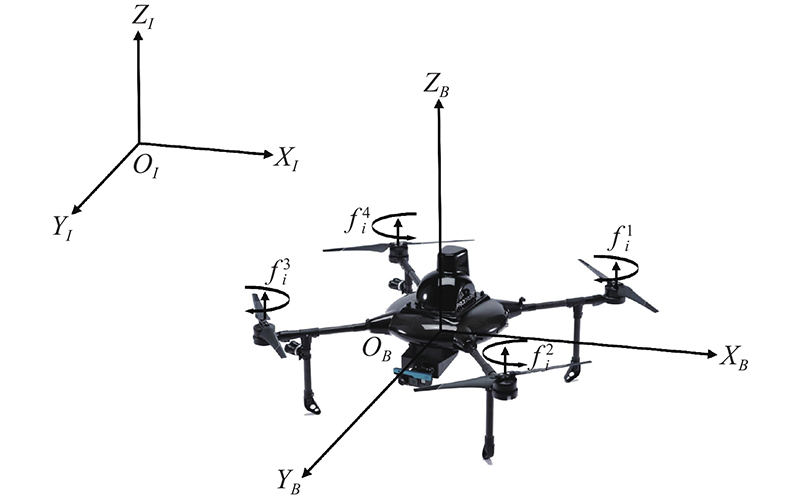
| | Inertia frame, body frame |
| | Mass, gravitational acceleration, inertial matrix |
| | Position, linear velocity |
| | Unit quaternion, angular velocity |
| | Rotation matrix |
| | Thrust input, torque input |
| | Target configuration, desired reference linear velocity |
| | Linear velocity tracking error |
| | Intermediary control input |
| | Auxiliary variables |
| | Auxiliary error variables |
| | Auxiliary control input |
| | Desired attitude, attitude tracking error |
| | Desired angular velocity, angular velocity tracking error |
| | Positive scalar gains |
| | Positive scalar gains |
| | Positive scalar gains |

"
"

"

"
"
"
"
"
"
"
"
"
"
"
"
"
"
"

"
| 1 |
HUA M D, HAMEL T, MORIN P, et al Introduction to feedback control of underactuated VTOL vehicles: a review of basic control design ideas and principles. IEEE Control Systems Magazine, 2013, 33 (1): 61- 75.
doi: 10.1109/MCS.2012.2225931 |
| 2 |
XU Y, LUO D L, YOU Y C, et al New advances in multiple autonomous aerial robots formation control technology. Science China Technological Sciences, 2019, 62 (10): 1871- 1872.
doi: 10.1007/s11431-018-9457-9 |
| 3 |
LUO D L, SHAO J, XU Y, et al Coevolution pigeon-inspired optimization with cooperation-competition mechanism for multi-UAV cooperative region search. Applied Sciences, 2019, 9 (5): 827.
doi: 10.3390/app9050827 |
| 4 |
QIU H X, DUAN H B A multi-objective pigeon-inspired optimization approach to UAV distributed flocking among obstacles. Information Sciences, 2020, 509, 515- 529.
doi: 10.1016/j.ins.2018.06.061 |
| 5 |
ZULU A, JOHN S A review of control algorithms for autonomous quadrotors. Open Journal of Applied Sciences, 2014, 4 (14): 547- 556.
doi: 10.4236/ojapps.2014.414053 |
| 6 |
YU Y S, DING X L A global tracking controller for underactuated aerial vehicles: design, analysis, and experimental tests on quadrotor. IEEE/ASME Trans. on Mechatronics, 2016, 21 (5): 2499- 2511.
doi: 10.1109/TMECH.2016.2558678 |
| 7 | KANG B, MIAO Y, LIU F, et al A second-order sliding mode controller of quad-rotor UAV based on PID sliding mode surface with unbalanced load. Journal of Systems Science and Complexity, 2020, 34 (1): 520- 536. |
| 8 |
DONG X W, YU B, SHI Z Y, et al Time-varying formation control for unmanned aerial vehicles: theories and applications. IEEE Trans. on Control Systems Technology, 2015, 23 (1): 340- 348.
doi: 10.1109/TCST.2014.2314460 |
| 9 | DONG X W, ZHOU Y, REN Z, et al Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying. IEEE Trans. on Industrial Electronics, 2016, 64 (6): 5014- 5024. |
| 10 |
DONG X W, ZHOU Y, REN Z, et al Time-varying formation control for unmanned aerial vehicles with switching interaction topologies. Control Engineering Practice, 2016, 46, 26- 36.
doi: 10.1016/j.conengprac.2015.10.001 |
| 11 |
ZHANG W, DONG C Y, RAN M P, et al Fully distributed time-varying formation tracking control for multiple quadrotor vehicles via finite-time convergent extended state observer. Chinese Journal of Aeronautics, 2020, 33 (11): 2907- 2920.
doi: 10.1016/j.cja.2020.03.004 |
| 12 | OH K K, PARK H, AHN H S A survey of multi-agent formation control. Automatica, 2015, 53, 429- 448. |
| 13 | HAN Z M, LIN Z Y, FU M Y, et al Distributed coordination in multi-agent systems: a graph Laplacian perspective. Frontiers of Information Technology & Electronic Engineering, 2015, 16 (6): 429- 448. |
| 14 |
ZHU B, XIE L H, HAN D, et al A survey on recent progress in control of swarm systems. Science China Information Sciences, 2017, 60 (7): 070201.
doi: 10.1007/s11432-016-9088-2 |
| 15 | XU Y, LAI S P, LI J X, et al Concurrent optimal trajectory planning for indoor quadrotor formation switching. Journal of Intelligent & Robotic Systems, 2019, 94 (2): 503- 520. |
| 16 |
WANG J R, LUO X Y, LI X L Sliding mode formation control of nonlinear multi-agent systems with local Lipschitz continuous dynamics. Journal of Systems Science and Complexity, 2019, 32 (6): 759- 777.
doi: 10.1007/s11424-018-7299-1 |
| 17 |
HU J L, SUN X X, HE L Formation tracking for nonlinear multi-agent systems with input and output quantization via adaptive output feedback control. Journal of Systems Science and Complexity, 2020, 33 (2): 401- 425.
doi: 10.1007/s11424-019-8087-2 |
| 18 | SUN Z Y, MOU S S, DEGHAT M, et al Finite time distributed distance-constrained shape stabilization and flocking control for d-dimensional undirected rigid formations . International Journal of Robust and Nonlinear Control, 2019, 26 (13): 2824- 2844. |
| 19 |
ZHAO S Y, ZELAZO D Translational and scaling formation maneuver control via a bearing-based approach. IEEE Trans. on Control of Network Systems, 2017, 4 (3): 429- 438.
doi: 10.1109/TCNS.2015.2507547 |
| 20 |
HAN Z M, WANG L L, LIN Z Y, et al Formation control with size scaling via a complex Laplacian-based approach. IEEE Trans. on Cybernetics, 2016, 46 (10): 2348- 2359.
doi: 10.1109/TCYB.2015.2477107 |
| 21 |
HAN Z M, GUO K X, XIE L H, et al Integrated relative localization and leader-follower formation control. IEEE Trans. on Automatic Control, 2019, 64 (1): 20- 34.
doi: 10.1109/TAC.2018.2800790 |
| 22 | RANJBAR M, BEHESHTI M T, BOLOUKI S Event-based formation control of networked multiagent systems using complex Laplacian under directed topology. IEEE Control Systems Letters, 2020, 5 (3): 1085- 1090. |
| 23 |
ZHAO S Y Affine formation maneuver control of multiagent systems. IEEE Trans. on Automatic Control, 2018, 63 (12): 4140- 4155.
doi: 10.1109/TAC.2018.2798805 |
| 24 |
XU Y, LI D Y, LUO D L, et al Two-layer distributed hybrid affine formation control of networked Euler-Lagrange systems. Journal of the Franklin Institute, 2019, 356 (4): 2172- 2197.
doi: 10.1016/j.jfranklin.2018.11.029 |
| 25 |
XU Y, LUO D L, LI D Y, et al Target-enclosing affine formation control of two-layer networked spacecraft with collision avoidance. Chinese Journal of Aeronautics, 2019, 32 (12): 2679- 2693.
doi: 10.1016/j.cja.2019.04.016 |
| 26 | XU Y, ZHAO S Y, LUO D L, et al Affine formation maneuver control of high-order multi-agent systems over directed networks. Automatica, 2020, 118, 198994. |
| 27 | XU Y, LIN Z Y, ZHAO S Y Distributed affine formation tracking control of multiple fixed-wing UAVs. Proc. of the 39th Chinese Control Conference, 2020, 4712- 4717. |
| 28 | LI D Y, MA G F, XU Y, et al. Layered affine formation control of networked uncertain systems: a fully distributed approach over directed graphs. IEEE Trans. on Cybernetics, 2021, 51(12): 6119−6130. |
| 29 |
LI D Y, CAO K, KONG L H, et al Fully distributed cooperative circumnavigation of networked unmanned aerial vehicles. IEEE/ASME Trans. on Mechatronics, 2021, 26 (2): 709- 718.
doi: 10.1109/TMECH.2021.3055654 |
| 30 | LIN Y J, LIN Z Y, SUN Z Y, et al. A unified approach for finite-time global stabilization of affine, rigid and translational formation. IEEE Trans. on Automatic Control, 2021, 67(4): 1869−1881. |
| 31 |
YANG J Y, XIAO F, CHEN T W Formation tracking of nonholonomic systems on the special Euclidean group under fixed and switching topologies: an affine formation strategy. SIAM Journal on Control and Optimization, 2021, 59 (4): 2850- 2874.
doi: 10.1137/20M1328130 |
| 32 | BENZEMRANE K, SANTOSUOSSO G L, DAMM G Unmanned aerial vehicle speed estimation via nonlinear adaptive observers. Proc. of the American Control Conference, 2007, 985- 990. |
| 33 | ABDESSAMEUD A, POLUSHIN I G, TAYEBI A Motion coordination of thrust-propelled underactuated vehicles with intermittent and delayed communications. Systems & Control Letters, 2015, 79, 15- 22. |
| 34 |
ZOU Y, MENG Z Y Distributed hierarchical control for multiple vertical takeoff and landing UAVs with a distance-based network topology. International Journal of Robust and Nonlinear Control, 2019, 29 (9): 2573- 2588.
doi: 10.1002/rnc.4513 |
| 35 | ZHAO W, LIU H, LEWIS F L Robust formation control for cooperative underactuated quadrotors via reinforcement learning. IEEE Trans. on Neural Networks and Learning Systems, 2020, 32 (10): 302371. |
| 36 |
ZOU Y Nonlinear robust adaptive hierarchical sliding mode control approach for quadrotors. International Journal of Robust and Nonlinear Control, 2017, 27 (6): 925- 941.
doi: 10.1002/rnc.3607 |
| 37 | ROBERTS A, TAYEBI A Adaptive position tracking of VTOL UAVs. IEEE Trans. on Robotics, 2010, 27 (1): 129- 142. |
| 38 |
ZHU B, HUO W Nonlinear control for a model-scaled helicopter with constraints on rotor thrust and fuselage attitude. Acta Automatica Sinica, 2014, 40 (11): 2654- 2664.
doi: 10.1016/S1874-1029(14)60411-0 |
| 39 | SLOTINE J J, LI W P. Applied nonlinear control. Englewood Cliffs: Prentice Hall, 1991. |
| 40 |
CONG Y Z, DU H B, JIN Q C, et al Formation control for multiquadrotor aircraft: connectivity preserving and collision avoidance. International Journal of Robust and Nonlinear Control, 2020, 30 (6): 2352- 2366.
doi: 10.1002/rnc.4886 |
| 41 |
HU J W, WANG M, ZHAO C H, et al Formation control and collision avoidance for multi-UAV systems based on Voronoi partition. Science China Technological Sciences, 2020, 63 (1): 65- 72.
doi: 10.1007/s11431-018-9449-9 |
| 42 |
HUANG Y F, LIU W, LI B, et al Finite-time formation tracking control with collision avoidance for quadrotor UAVs. Journal of the Franklin Institute, 2020, 357 (7): 4034- 4058.
doi: 10.1016/j.jfranklin.2020.01.014 |
| 43 |
SHANG W, JIN G H, ZHANG D D, et al Adaptive fixed time nonsingular terminal sliding-mode control for quadrotor formation with obstacle and inter-quadrotor avoidance. IEEE Access, 2021, 9, 60640- 60657.
doi: 10.1109/ACCESS.2021.3074316 |
| 44 | ENDO M, IBUKI T, SAMPEI M Collision-free formation control for quadrotor networks based on distributed quadratic programs. Proc. of the American Control Conference, 2019, 3335- 3340. |
| 45 | GHOMMAM J, LUQUE-VEGA L F, SAAD M Distance-based formation control for quadrotors with collision avoidance via Lyapunov barrier functions. International Journal of Aerospace Engineering, 2020, 2020, 2069631. |
| 46 |
ZHAO E J, ZHONG Z N, ZHENG X Finite-time control of formation system for multiple flight vehicles subject to actuator saturation. Journal of Systems Engineering and Electronics, 2020, 31 (5): 1019- 1030.
doi: 10.23919/JSEE.2020.000076 |
| 47 |
QI D, HU J H, LIANG X L, et al Research on consensus of multi-agent systems with and without input saturation constraints. Journal of Systems Engineering and Electronics, 2021, 32 (4): 947- 955.
doi: 10.23919/JSEE.2021.000081 |
| 48 |
DING STEVEN X C, LI L L, JIANG B Unified control and detection framework and its applications: a review, some new results, and future perspective. Journal of Systems Engineering and Electronics, 2021, 32 (5): 995- 1013.
doi: 10.23919/JSEE.2021.000085 |
| No related articles found! |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||